Skynaute is a hybrid inertial/GNSS navigation system based on HRG Crystal technology. It will serve as a critical component of the Hercules avionics suite designed and integrated by Moog.
The Skynaute navigation unit by Safran. (Photo: Safran Federal Systems)
Under this agreement, Safran Federal Systems will supply Skynaute units to support enhanced navigation performance in demanding operational environments.
“Being selected by Moog underscores the reliability, innovation, and mission readiness of our Skynaute solution,” said Tony Full, senior director of Business Development, Navigation Systems, Safran Federal Systems. “This collaboration continues our tradition of delivering precise, resilient navigation technologies to meet the evolving needs of military aviation.”
Skynaute is engineered to meet the needs of both legacy and next-generation military aircraft, providing superior accuracy and robustness with minimal size, weight, and power consumption. The system is suited for retrofit and modernization programs, particularly for platforms like the Hercules that remain integral to global air mobility and tactical transport operations.
Safran Federal Systems supports Safran Defense & Space Inc. (Safran DSI) by providing APNT technologies across a range of defense and aerospace applications.
Researchers from Finland, Switzerland, Spain and Romania gathered at Tampere University in Finland for a workshop this month within the Robosat project focusing on localization of autonomous machines.
Workshop participants discussed and demonstrated novel technical solutions to improve localization, particularly of autonomous machines operating in challenging and unconstrained environments, such as forests and mountainous regions.
The Robosat project aims to change how autonomous robots navigate in the wild by integrating multi-sensor and multi-GIS data. During the Tampere workshop, partners from Tampere University (Finland),ETH Zürich (Switzerland), Universitat de València (Spain) and CITST (Romania) discussed strategies for sharing data, identifying relevant GIS and GNSS datasets, and leveraging AI for autonomous labeling of large-scale data.
Key topics included the integration of multi-sensor and multi-GIS data to enhance positioning accuracy, planning piloting tests with ETH’s ANYmal robot and TAU’s new I/Q GNSS grabber device, and discussing methods for AI-driven data labeling for massive datasets collected during field trials.
The Tampere University project team includes Elena Simona Lohan and Jari Nurmi as supervisors and Ph.D. students Yelyzaveta Pervysheva and Muhammad Safi.
The Robosat efforts supports applications in robotics, environmental monitoring, and industrial automation. By combining expertise across Europe, Robosat intends to pave the way for smarter, safer and more efficient autonomous systems.
It also aims to provide new open-access rich datasets to the research community. A first dataset enabling multimodal classification studies has already been published on Zenodo as a collaborative work between Tampere University and CITST teams.
The Robosat project
Autonomous robot navigation in the wild using satellite-based 3D geographical information (ROBOSAT)aims to provide a scalable MultiGIS high-quality data collection platform through the use of a quadrupedal robot that can autonomously perform long-distance missions in challenging environments, such as Alpes mountains or Finnish forests.
Consortium organizations are comprised of three universities and one SME:
Tampere University, Finland. Expertise: GNSS, wireless positioning, sensing, and communications, RF Fingerprinting and interference mitigation. Coordinator: Elena Simona Lohan
ETH, Switzerland. Expertise: automation, mapping, control theory, and legged-robot research. PI:Marco Hutter
The International Air Transport Association (IATA) has called for vigilance following the increasing number of GNSS spoofing and jamming incidents worldwide. The growing interference poses a significant risk to flight navigation and pilot safety.
Of note is a spike in incidents at major Indian airports. Almost 2,000 GNSS interference incidents have been logged at airports in India since 2023, including the airports in Delhi, Mumbai, Kolkata, Amritsar, Hyderabad, Bengaluru and Chennai.
IATA represents more than 360 airlines, accounting for 80% of global air traffic. Indian carriers Air India, IndiGo, Air India Express and SpiceJet are members.
“GPS spoofing and jamming incidents are increasing rapidly across the world,” said IATA Director General Willie Walsh, speaking at an industry event in Geneva. “This is not merely a technical concern — it’s an operational vigilance issue for pilots.”
Walsh noted a higher frequency of interference events, expanding well beyond conflict zones and affecting global civil aviation routes.
India’s Civil Aviation Ministry informed Parliament that between November 2023 and November 2025, a total of 1,951 GNSS interference cases were reported. The data collection began after the Directorate General of Civil Aviation (DGCA) issued an advisory circular in November 2023, mandating airlines to report all GNSS-related disruptions.
The United Kingdom has issued a summary of input it requested on positioning, navigation and timing (PNT) technologies. The UK deems PNT resilience critical for the UK’s economy.
After a call for evidence, the UK Department for Science, Innovation & Technology received 128 responses from business, industry, academics and the public. These views on opportunities and challenges for the UK’s PNT industry are gathered in a document available online.
Key themes identified
A viable market exists for GNSS-independent PNT, with respondents citing applications in defense and critical infrastructure.
Awareness of GNSS vulnerabilities in end users and critical infrastructure sectors is low.
Potential opportunities in GNSS-independent PNT and other technologies include eLoran, LEO-PNT, 5G, quantum PNT, inertial systems, and applications for GNSS-denied environments.
Short-term challenges include funding constraints and a lack of legislation and standards.
Long-term challenges include scalability, lack of sovereign manufacturing capability, and insufficient planning .
The industry is experiencing a skills shortage, especially in engineering, with a limited talent pipeline and lack of dedicated training opportunities.
In all, 128 responses were received from businesses (sellers and users of PNT), academics, industry bodies and the public. Respondents could select multiple sectors when describing their background; the defense sector was selected most frequently (39 responses), followed by space (35 responses), aviation and drones (28 responses), maritime (28 responses) and communications (27 responses).
Responses will be used, along with wider research, to inform future government policy interventions to support the UK PNT sector.
The U.S. Army is starting market research for possible sources of an optical tracking solution for its test ranges to use in GNSS-denied environments.
The Army Contracting Command – Orlando issued a Sources Sought Notice Dec. 11 on behalf of the Test Resource Management Center Test and Evaluation/Science and Technology (T&E/S&T) Program.
The Army wants to identify potential sources in the market having the interest, skills and ability to complete a thorough technology study and trade space analysis related to the viability of Time-Space-Position Optical Tracking (T-SPOT) for use on test ranges. The technology would be used as a time-space-position information (TSPI) truth sensor in GNSS-denied environments.
Required capabilities
The primary objective of a T-SPOT prototype effort would be to develop the system architecture, concept of operations, and comprehensive trade space analysis based on the results of modeling and simulation of the future-state system. The intent of the effort would not be to deliver the fieldable system itself but rather to answer whether/how such a system would achieve its performance goals.
A future T-SPOT system should
achieve 3D TSPI accuracy comparable to the accuracy of real-time kinematic positioning (RTK) GNSS navigation systems.
be generated in a near-continuous manner, notionally at an update rate comparable to GNSS navigation systems.
achieve full performance during daylight and in good visibility conditions, with the goal of operating at day and at night and in all-weather conditions.
support temporary and modular integration with airborne systems being tested, operating at altitudes typical for the operation of U.S. Air Force cargo and single-engine training aircraft, with the goal of supporting aircraft closer to or on the ground.
minimize its size, weight and power (SWaP) budget for integration with crewed aircraft, with the goal of supporting integration with small uncrewed aerial systems.
In addition to the sensor hardware hosted on the SUT, a future T-SPOT system should rely on terrestrial features solely comprised of passive landmarks (no active emissions; no required power). The system may employ synthetic landmarks (e.g., purposely installed fiducials) and/or pre-existing landmarks (of either natural or human origin). While the system must operate independently of GNSS, GNSS may be used pre- and post-test (i.e., for landmark surveying).
More details are on the announcement page. The deadline for responses is Jan. 30.
The draft EUROCAE document ED-348: Guidelines for the use of multi-GNSS solutions for UAS – Medium Risk is now open for comments.
Between 2019 and 2022, EUROCAE group SG-6 developed guidelines for low risk operations Sail I and Sail II (ED-301) to support the use of GNSS and show compliance with previously established safety objectives (SORA OSO#13).
SORA OSO#13 is also applicable to higher SAIL operations with a different level of assurance, which may take the form of a service level agreement (SLA) with external GNSS service providers. This changes the approach with respect to low-risk operations, so a new standard will be defined instead of evolving ED-301.
“When discussing the use of GNSS in UAS operations, the assessment cannot be limited to GNSS as an external service only, but should consider other critical aspects such as system architecture, vulnerabilities, performance analysis, receiver design or integration, among other elements,” SG-6 posted on the EUROCAE website.
Because the requirements for medium-risk operations are more demanding than for low-risk operations, the scope of the ED-348 document not only covers compliance with OSO#13 requirements — where GNSS is considered an external service to support UAS operations — but also considers other relevant SORA OSOs where GNSS plays a relevant role.
Based on this information, the guidelines cover the following OSOs in regard to GNSS support SAIL III operations:
OSO#05: UAS is designed considering system safety and reliability.
OSO#08: Operational procedures are defined, validated and adhered to.
OSO#13: External services supporting UAS operations are adequate to the operation.
OSO#23: Environmental conditions for safe operations are defined, measurable and adhered to.
OSO#24: UAS is designed and qualified to operate under adverse environmental conditions.
Interested parties are invited to review the proposed draft on the EUROCAE Workspace and complete the comment form. Non-members of EUROCAE can register and click on “Access only to Open Consultation”). Early replies are encouraged; the deadline for comments is Feb. 2, 2026.
The non-profit European Organisation for Civil Aviation Equipment (EUROCAE) is based in Lucerne, Switzerland, and serves as a European forum focusing on electronic equipment for air transport.
SatLab Geosolutions has launched a new GNSS receiver, the SL8. The SatLab SL8 Laser RTK combines dual cameras, GNSS, an inertial measurement unit (IMU) and visible laser technology to make surveying faster and easier.
With non-contact measurement, image-assisted targeting, CAD live-view stakeout, and a built-in LoRa radio. It ensures smooth, reliable work even in complex or GNSS-limited environments, SatLab said.
Photo: SatLab
The SL8 achieves 2 cm accuracy within 10 meters and enables efficient data collection across bridges, tunnels, riverbanks, and other sites where traditional GNSS methods are restricted.
It features image-assisted targeting through SatSurv software, displaying laser points directly on real-time images for quick and precise aiming. Its automotive-grade IMU requires no manual calibration or initialization and enhances measurement accuracy by up to 40% in GNSS-challenged areas.
A built-in multi-protocol LoRa transceiver provides stable transmission beyond 15 km and compatibility with multiple RTK brands. The integrated CAD and visual stakeout functions combine live imagery with CAD data, allowing users to visualize target points on site and increase layout efficiency by up to 50%.
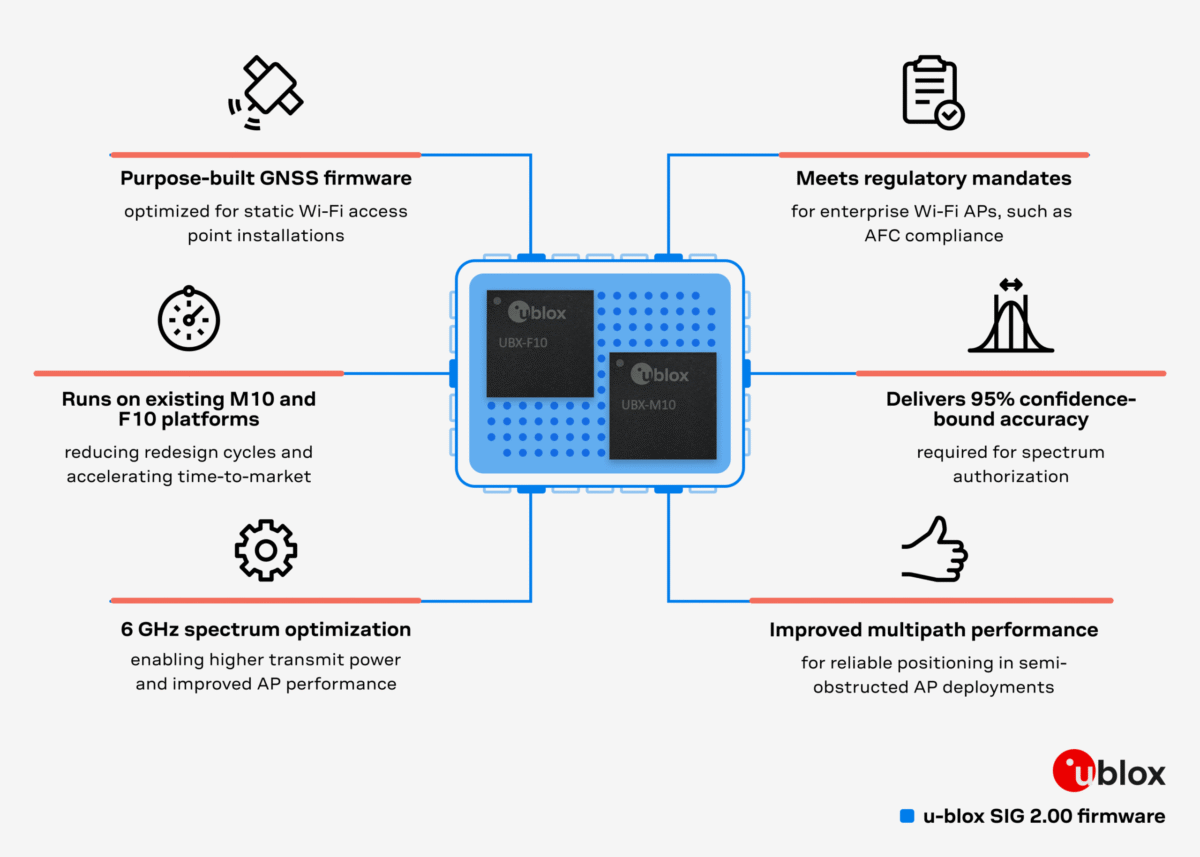
Dedicated firmware delivers AFC-compliant geolocation and adheres to 6 GHz spectrum rules, accelerating deployment of location-enabled Wi-Fi infrastructure.
U-blox has released Standard Infrastructure GNSS (SIG) 2.00, a dedicated GNSS firmware solution for Wi-Fi 6E/7/8 access points operating in the 6 GHz band.
Designed to meet Automated Frequency Coordination (AFC) requirements in the U.S. and Canada, SIG 2.00 enables access points to determine their geolocation with 95% confidence-bound accuracy. It also delivers improved positioning accuracy under multipath environments, ensuring AFC systems receive reliable geolocation data.
Compatible with the u-blox M10 and F10 platforms, the firmware simplifies compliance processes and speeds up integration, helping OEMs deploy high-performance, location-enabled Wi-Fi networks quickly and at scale.
Turnkey geolocation for regulatory-ready 6 GHz deployments
As Wi-Fi infrastructure expands into the 6 GHz band, compliance with regional spectrum regulations becomes essential for Standard Power operation. SIG 2.00 offers a ready-to-integrate GNSS solution that meets these requirements out-of-the-box, reducing design effort while ensuring operational reliability.
Its precise location reporting enables Wi-Fi 6E/7/8 access points to coexist safely with incumbent users of the 6 GHz band, such as microwave and satellite services.
Flexible design options on M10 and F10 platforms
SIG 2.00 runs on two established u-blox GNSS platforms. On u-blox M10, it offers a cost-efficient single-band (L1) ultra-low-power solution for mainstream deployments. On u-blox F10, it provides a dual-band (L1/L5) GNSS with RAW data output, delivering enhanced robustness in multipath or dense environments.
This flexibility allows OEMs to meet a wide range of performance and integration requirements while achieving 95% confidence-bound accuracy and maintaining regulatory compliance.
By removing complexity from AFC compliance, SIG 2.00 supports rapid design-in for enterprise and industrial Wi-Fi deployments, from campuses and stadiums to city-wide infrastructure. With robust positioning accuracy and streamlined integration, it helps accelerate the adoption of high-performance, location-enabled wireless networks in the 6 GHz band.
The 5G PNT network in Santa Clara County will mark the first real-world demonstration of a 5G-powered backup to GPS
NextNav Inc., a leader in next-generation terrestrial positioning, navigation, and timing (PNT) and 3D geolocation solutions, will commence operations of a 5G PNT network in Santa Clara County, California, as early as Dec. 11.
Network operations of positioning, navigation and timing applications represent the next milestone toward commercial readiness and the mission to deliver a resilient complement to GPS.
The 5G PNT network will consist of multiple fixed base station locations using a standards-compliant 5G signal with a positioning reference signal (PRS) enabled, a standalone 5G core, and NextNav’s 3D PNT architecture. The network’s authorized technical parameters will align with those in NextNav’s proposal to optimize the lower 900 MHz band to enable a terrestrial, widescale backup to GPS that is broadly available to critical infrastructure, public safety and American consumers.
“We’re incredibly pleased to continue demonstrating our technology in a real-world operational environment,” said Mariam Sorond, CEO of NextNav. “Activating this network is a critical step in our commercialization process, proving that robust 5G broadband service and high-integrity PNT can be delivered together, at scale, using standard 5G equipment.”
The 5G PNT network will validate NextNav’s 5G PRS-based PNT end-to-end architecture under real-world conditions.
“This is the first public demonstration of a full-scale and operational 5G-based PNT in live deployment, delivering both resilient PNT and broadband service simultaneously,” said Arun Raghupathy, NextNav Co-Founder and CTO. “Through this commercialization deployment, we’re validating our 5G-based network can deliver accurate 3D location, improved timing synchronization, and enhanced resilience. This real-world deployment is critical to establishing U.S. leadership in next-generation PNT technologies.”
The 5G PNT network will support the broader adoption of 5G-based terrestrial PNT with 5G broadband capabilities for operators, enterprises and ecosystem partners. This deployment will also prove that NextNav’s software solution is ready to scale and deliver commercial PNT while serving the critical national security and public safety needs of the United States.
AeroVironment has integrated its visual navigation system (VNS) kit with the Puma Long Endurance (LE) small unmanned aircraft system, delivering GNSS-denied navigation capability to ensure mission success.
First introduced in 2022 for the Puma 2 AE and Puma 3 AE, the VNS kit uses advanced computer vision and onboard processing to deliver precise, GNSS-independent navigation. Its integration into Puma LE now extends this capability across the full Puma family for greater flexibility and resilience in degraded or denied environments.
“Assured navigation is critical to the mission, especially as GNSS becomes an increasingly vulnerable resource,” said Jason Hendrix, Vice President of Small Uncrewed Systems for AV. “By fusing visual and inertial data in real time, the system enables uninterrupted flight paths, accurate geolocation, and mission continuity in unreliable GNSS regions.”
Using a suite of downward-facing sensors, cameras and onboard computing, the VNS kit performs visual inertial odometry (VIO) to capture and analyze terrain imagery, estimating true aircraft position in real time. The system fuses continuous visual data from the cameras with motion inputs from onboard inertial sensors to calculate precise position, velocity, and orientation — allowing the aircraft to know where it is and where it is going when GNSS is not available. It automatically transitions between GNSS-enabled and GNSS-denied modes with zero pilot input, ensuring uninterrupted mission continuity in contested environments.
In September, AV announced several upgrades to the Puma LE platform that include the integration of a Laser Target Designator and the release of the Universal Gimbal Kit, enhancements that evolve Puma LE beyond ISR into a cutting-edge precision-engagement system.
“Every upgrade to Puma LE, including the addition of the VNS kit and our new laser designator and gimbal capabilities, is driven by one goal: giving the warfighter greater confidence, flexibility, and capability,” said Trace Stevenson, president of Autonomous Systems at AV. “These recent releases are a great example of AV constantly evolving our platforms to ensure they are at the forefront of technology and providing best in class capability to the warfighter.”
The VNS Kit is designed as an add-on option for new Puma 3 AE or Puma LE system orders and as a retrofit kit allowing existing Puma 2 AE, Puma 3 AE, and Puma LE customers to upgrade fielded systems. The compact two-piece add-on installs into existing Pumas with minimal impact on performance and fits within the standard Puma cases for efficient mission packout. The standard Puma LE system weighs 23.8 pounds and offers 6.5 hours of endurance, a 60-kilometer range, is inaudible at 500 feet and features tool-free payload swaps for seamless transitions between intelligence, surveillance and reconnaissance (ISR), targeting, and other mission sets.
The small, light RTK receiver integrates the Anypos App and LoRa radio for high-precision surveying, photo surveys and 3D modeling.
Image: Aurora Navigation
Aurora Navigation has launched the Astra1 Mobile Visual RTK, a professional-grade GNSS receiver engineered to redefine high-precision mobile data acquisition.
The Astra1 is an ultra-compact (60g) solution designed to deliver reliable, centimeter-level positioning and advanced 3D mapping capabilities through seamless integration with a smartphone and the proprietary Anypos App.
The Astra1 Mobile Visual RTK is built to meet the demand for highly portable, yet exceptionally reliable, high-precision tools that simplify complex field operations.
Full Field Functionality. Users can perform standard surveying tasks, stakeout and RAW data capture directly from their mobile device.
Photo Survey. The system enables high-accuracy measurement of inaccessible or remote points, providing typical accuracy under 4 cm and significantly enhancing operator safety and efficiency.
Georeferenced 3D Scanning. Astra1 allows users to capture photos with precise RTK coordinates, enabling the creation of accurate 3D models for detailed construction verification and digital twinning applications.
Key Functional Features and Reliability:
Unmatched 60 grams and matchbox size
1408 channels, multiple frequencies
900MHz LoRa radio, compatible with Aurora Nav G1000 geodetic receiver
Accuracy: RTK 8mm+1PPM Horizontally, 15mm+1PPM Vertically, Photo survey <4 cm (2-15 m distance)
AI-enhanced reliability
IP67-rated
Mobile Visual Survey Workflow via the Anypos App, transforming a standard smartphone into a comprehensive high-precision data collector.
Image: Aurora Navigation
Industry applications and vision
Astra1 is a suitable and useful tool for professionals across multiple sectors:
Surveying & Engineering. Streamlines field stakeout and topographic data collection with minimal equipment.
UAV & Robotics. Serves as a lightweight PNT solution for GCP collection or base station for unmanned aerial vehicles (UAVs) and robotic platforms.
BIM/Digital Twin. Provides the foundational high-accuracy data required for complex 3D modeling projects.
“We designed Astra1 to address the fundamental need for portability, safety, speed, reliability and simplicity in professional geospatial data collection,” said Zhitao Lyu, founder and CEO, Aurora Navigation. “By focusing on superior performance in tough environments and integrating our Anypos App for a seamless visual workflow, we are delivering a tool that significantly boosts efficiency and safety, and provides survey-grade confidence to every user.”
Headquartered in Calgary, Canada, Aurora Navigation is focused on developing and delivering innovative GNSS solutions. The company is committed to advancing the efficiency and reliability of geospatial data collection through its unique blend of compact hardware design and advanced positioning algorithms.
Shipborne Measurements Near the Kaliningrad Border
A major new report by GPSPATRON gathered data between June 23 and Oct. 14, aboard a vessel routinely leaving the Port of Gdańsk and performing extended maneuvers in open water.
The vessel conducted multiple offshore measurement campaigns, resulting in a shipborne dataset that provides a far more accurate representation of the true GNSS environment experienced by maritime operators in the Gulf of Gdańsk. It also reveals a level of interference complexity and intensity not visible in a previous coastal study.
In the present phase of research, the GPSPatron team moved beyond land-based monitoring and installed itsGP-Probe TGE2 interference sensor directly on board a research vessel. The ship operated throughout the southern Baltic Sea, including regular approaches toward the maritime boundary of the Kaliningrad region.
By placing the sensor on a moving platform rather than a coastal location, they were able to record GNSS interference exactly as it affects real vessels — capturing signal conditions that cannot be observed from shore due to differences in radio horizon, antenna orientation, multipath environment, and proximity to potential interference sources.
The GPSPATRON probe TGE2 instaslled within the vessel’s equipment. (Photo: GPSPATRON)
Transition from classical jamming to combined spoofing-jamming interference
In contrast to the previous six-month coastal study, where all recorded GNSS interference consisted exclusively of multi-constellation jamming, the current shipborne campaign reveals a fundamentally different interference landscape.
All major events now present a dual-layer structure composed of:
GPS L1 spoofing, generating forged satellite-like signals, and
Simultaneous jamming of GLONASS, Galileo, and BeiDou.
This combined architecture forces GNSS receivers to rely solely on spoofed GPS signals while denying access to independent ranging sources. The practice is consistent with commonly used operational strategies: spoofing only one constellation (GPS) drastically reduces system complexity and cost, whereas spoofing all GNSS systems would require multiple parallel RF chains, SDR-based generators, algorithms for signal simulations and amplifiers.
Highest recorded levels of GNSS disruption
The most severe interference period occurred from late June through July, during which:
GNSS availability dropped to 83.5%,
4 days, 5 hours and 24 minutes of spoofing were recorded — by far the highest cumulative spoofing activity of the entire campaign.
The single most extreme incident took place between 1 and 3 July, with nearly 30 consecutive hours of spoofing within a 48-hour interval, posing a severe risk for maritime navigation.
In subsequent months the interference intensity gradually decreased, yet low-power and short-duration events continued to be observed.
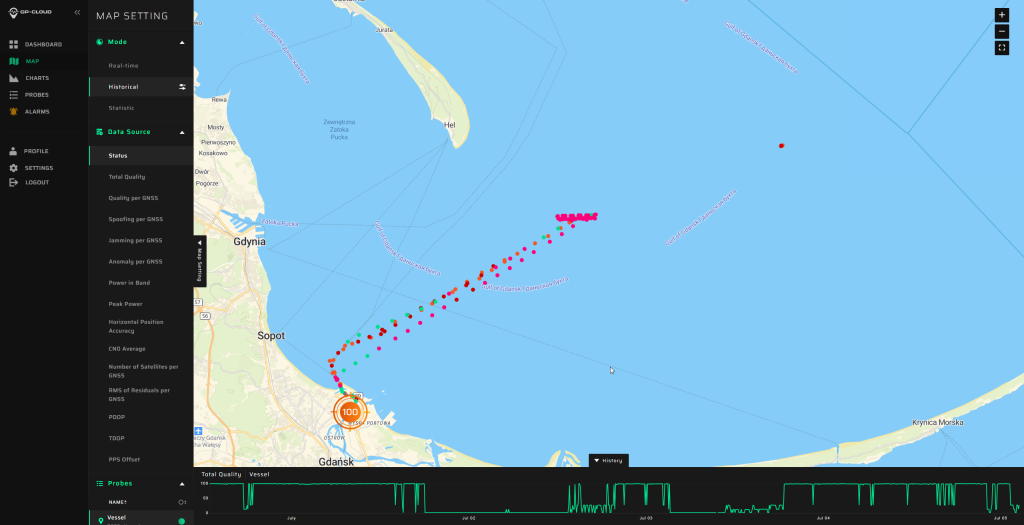
The area of the Baltic Sea the vessel patroled for GNSS interference. (Image: GPSPATRON)
A multi-emitter, synchronously operating interference network
Spectrogram analysis reveals that the interference does not originate from a single source but from four distinct, technologically different emitters operating in coordination:
The synchronous activation and termination of all four components indicate a centrally coordinated system, yet their differing spectral signatures, bandwidths, and stability levels confirm multiple spatially separated stations rather than a single unified installation.
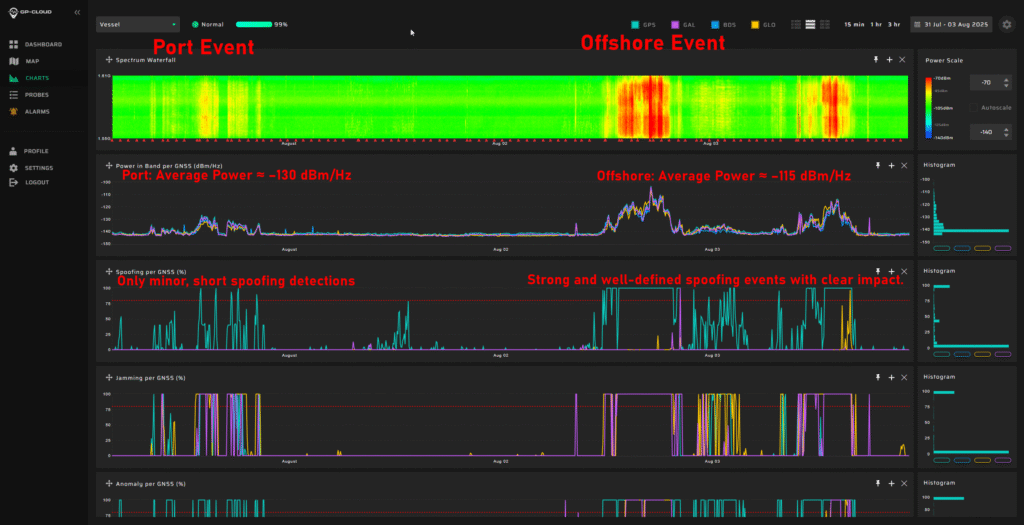
This GNSS interference analysis shows interference intensity increases away from port. (Image: GPSPATRON)
Evolution of interference modulation techniques
A clear shift is observed compared to the previous study :
Previously, the dominant interference source consisted of a high-quality, purpose-engineered wideband signal with three clean constellation-matched components — an indication of modern, precisely designed jamming equipment.
In the current campaign, the prevailing interference is simpler wideband chirp jamming, a less advanced technique but deployed at significantly higher power levels.
The wideband analog-like component further shows pronounced parasitic frequency fluctuations, characteristic of older low-stability RF hardware.
This indicates a shift from high-precision jamming to a mixed environment of legacy high-power systems combined with newer spoofing capabilities.
Interference strongly intensifies offshore
A distinct spatial gradient was recorded:
In the Port of Gdańsk, interference appears weak or barely detectable.
As the vessel moves into open water, the same signals become up to 15 dB stronger.
The interference power consistently increases when approaching the waters facing Kaliningrad.
This pattern shows that — intentionally or not — the interference system affects maritime traffic far more than coastal infrastructure, with the operational impact being greatest in offshore navigational zones.
Download the full report using the form on this page.