In last month’s GPS World newsletter, I mentioned that the National Geodetic Survey (NGS) would host a meeting of federal geospatial agencies under the auspices of the Federal Geodetic Control Subcommittee (FGCS). The purpose is to increase awareness and coordinate the NSRS Modernization across the government.
The FGCS meeting took place on Wednesday, Jan. 21, 2026. This session was highly informative and played a key role in aligning federal agency engagement strategies and self-assessments in preparation for the final adoption of the modernized NSRS and its associated new datums.
The FGCS holds a central position within the Federal Geographic Data Committee (FGDC). It coordinates geodetic activities across the federal government by
- Developing and promoting standards
- Advancing the use of authoritative geodetic control
- Facilitating the modernization of the NSRS across agencies
- Recommending the official adoption of the modernized NSRS by the FGDC as the foundational basis for geodetic control throughout the United States.
The agenda for the Jan. 21 meeting is detailed in the section titled “Federal Geodetic Control Subcommittee Meeting.” This gathering supported broader efforts to raise awareness, ensure coordination and prepare agencies for the upcoming transition to the modernized NSRS, with formal approval and release anticipated later in 2027.
Federal Geodetic Control Subcommittee Meeting
January 21, 2026
Agenda:
MC: Christine Gallagher
| Time | Topic | Presenter |
| 1:00 – 1:15 pm | Welcome and Introductions | Daniel Roman |
| 1:15 – 1:20 pm | National Geodetic Survey (NGS) Update | Marian Westley |
| 1:20 – 1:30 pm | Geodetic Control Theme Update and its Modernization Timelines | Daniel Roman |
| 1:30 – 2:00 pm | NGS Modernization Engagement Plan and Progress | Dana J Caccamise II / Christine Gallagher |
| 2:00 – 2:15 pm | Bureau of Ocean Energy Management / Kearns & West | Andy Archer / Kyle Vint |
| 2:15 – 2:30 pm | US Census National Spatial Reference System (NSRS) Modernization Preparation | Vince Ossier / Josh Coutts |
| 2:30 – 2:40 pm | Break | |
| 2:40 – 2:55 pm | US Department of Transportation NSRS Modernization Preparation | Amy Nelson / Derald Dudley |
| 2:55 – 3:10 pm | American Society for Photogrammetry and Remote Sensing & National Society of Professional Surveyors Working Groups | Chris Parrish / Linda Foster |
| 3:10- 3:50 pm | Discussion: Q&A from Agency presentations. What hurdles to implementation do you see or anticipate? Share your insights from internal working groups | Group Discussion Moderator: Dana J Caccamise II and Daniel Roman |
| 3:50 – 4:00 pm | Closing Remarks | Daniel Roman |
| Adjourn to Silver Branch |
The meeting lasted three hours and covered a lot of material. Below are highlights; contact FGCS for the full meeting recording.
Christine Gallagher, NGS, opened the FGCS session and introduced Dan Roman, NOAA’s National Geodetic Survey senior advisor for geodesy.
Roman welcomed everyone and briefly outlined the meeting’s purpose. He then introduced Marian Westley, director of the Center for Operational Oceanographic Products and Services (CO-OPS) and current acting director of NGS.
Westley’s remarks were brief but important. She noted CO-OPS manages tide gauges and is updating several datums in partnership with NGS, including the Great Lakes International Great Lakes datum. She said the United States and Canada, along with NOS and other federal agencies such as the Corps of Engineers, are heavily involved in Great Lakes management. She also reported that CO-OPS is updating the National Tidal Datum Epoch (current NTDE: 1983-2001) and is working closely with NGS to tie the updated NTDE to the new NSRS. See the image titled “The NTDE Update: New Tidal Datums are Coming!“
During Roman’s comments, he highlighted the agencies and professional societies participating in the meeting presentations and provided an update on the latest rollout schedule for the modernized NSRS.
He emphasized that this Jan. 21, FGCS meeting marks the start of a broader coordination process. The primary purpose of this high-level session was to facilitate the sharing of experiences, strategies, and best practices among federal agencies as they prepare for NGS’s NSRS modernization and the transition to the new reference frames and datums.
Roman noted that future FGCS meetings will shift to a more technical and detailed focus. These subsequent sessions will allow agencies to present their self-assessment results, outline implementation strategies, and discuss progress toward adopting the modernized NSRS.
Key objectives across these meetings include:
- Collecting questions and feedback from participants,
- Understanding user needs and required accuracy levels,
- Identifying anticipated challenges during the transition,
- Exploring opportunities for federal agencies to collaborate and support one another throughout the implementation process.
This series of FGCS engagements aims to ensure coordinated, informed, and effective preparation across the federal government ahead of the final adoption and full rollout of the modernized NSRS.
Here are a few key points based on Dan’s remarks:
- Today’s presentations provide a broad overview of geospatial data modernization to inform departments about actions they may need to take and to start a dialogue about what each department is doing.
- NGS encourages agencies to form working groups; those groups must define their own requirements and create migration plans, including assessing existing data, required accuracies, and the tools needed based on product accuracy statements. [Note: My October 2025 GPS World newsletter highlighted organizations that are forming 2022 Reference Working Groups.] NGS will designate points of contact to facilitate discussions and planning.
- FGCS provides guidance on using geodetic data with various tools, models, and SOPs. User needs vary by accuracy: e.g., a 3-meter horizontal allowance (aids to navigation) is straightforward, while 3-centimeter requirements (e.g., FEMA Elevation Certificate) need more precise methods.
- Several beta products released in July 2025 are being finalized, enabling the private sector to integrate them into services. NGS is currently developing models and software to transform coordinates from the old datum to the new one. These models are expected around March, and in June/July NGS anticipates releasing an updated Beta NCAT tool to transform coordinates to the new datum. This tool will help users understand differences in local datums.
- Final steps include FGCS recommendations for FGDC to adopt the new NSRS and to publish a Federal Register notice on the adoption of the modernized NSRS, anticipated to be completed in early 2027.
After Dan Roman’s comments, Dana J Caccamise II gave a presentation describing NGS Modernization Engagement Plan and Progress. Dana should get an award for material he has prepared and for his work to assist agencies and professional organizations in preparing for the new NSRS. In my October 2025 GPS World Survey Scene newsletter, I highlighted the work of Dana J. Caccamise II, NGS regional geodetic advisor. Dana has developed vital guidance materials shared with federal agencies — such as the Federal Geographic Data Committee (FGDC) and professional organizations including the National Society of Surveyors (NSPS), American Society of Photogrammetry and Remote Sensing (ASPRS), and American Association for Geodetic Surveying (AAGS).
Here are a few key points based on Dana’s presentation titled “Visualizing Impact: Preparing for NSRS Modernization Through Geospatial Readiness and Collaboration.”
- Caccamise said that what started as a focused task quickly grew into a broader strategic effort. He shared insights to encourage thinking about NSRS modernization not merely as a technical update but as a strategic business decision that will shape how agencies create, manage, and share basic data across programs, systems, and partnerships.
- Caccamise briefly provided details to the U.S. Census. Before diving into modernization, he offered a personal glimpse of what it’s like to do a federal detail across agencies, noting he was fortunate to do a detail with the Census not long ago.
- Drawing on his experience, Caccamise emphasized the importance of cross-agency readiness and of building resilient trust and communication structures. While on detail at the Census, he was regularly surprised by new challenges, which made the work engaging; he strongly recommended that others take a detail at another agency if they have the opportunity. A key takeaway was the value of visualizing impact: beyond cataloging geospatial datasets, users must identify which support critical decisions, which are shared across agencies, and which risk becoming outdated if you don’t adapt. Mapping themes and workflows revealed real dependencies and, more importantly, vulnerabilities. That detail shifted his focus from “what data do we have” to “what roles does this data play.”

- Efforts around NSRS modernization include a key product developed by Caccamise: the Ready Package. Designed to help agencies assess their readiness for NSRS modernization, the package includes communication tools, technical checklists, and talking points to support agency staff.
- He mentioned that from field-level GIS technicians to senior policy leads, everyone needs to understand what’s changing and why it matters. A key part of engagement is meeting people where they are. Dana has worked with agency partners to raise awareness, build interest, and strengthen understanding — not just of technical changes but of the organizational shifts needed for a smooth transition.
- For agencies whose statistical workflows depend on spatially referenced data, that means ensuring location-based datasets remain accurate, comparable over time, and interoperable across programs when the reference system changes. Ultimately, this is about more than new coordinates: it’s about linking strategic planning to operational implementation, from data collection and integration to interagency coordination and informed decision-making.
- He mentioned that the big question he’s hearing from many organizations is: how should customers and partners prepare for modernization? He provided the following advice. Start by evaluating your geospatial workflows to understand how the transition will affect data management, operations, and decision-making. Assess dependencies on NGS products and services to ensure continued access and interoperability and proactively identify challenges and opportunities – he mentioned that NGS can’t do this for you because each agency’s situation is unique. Address potential impacts early to reduce operational risk by finding weak points before they cause surprises. Act now: preparing early will minimize future cost and complexity.
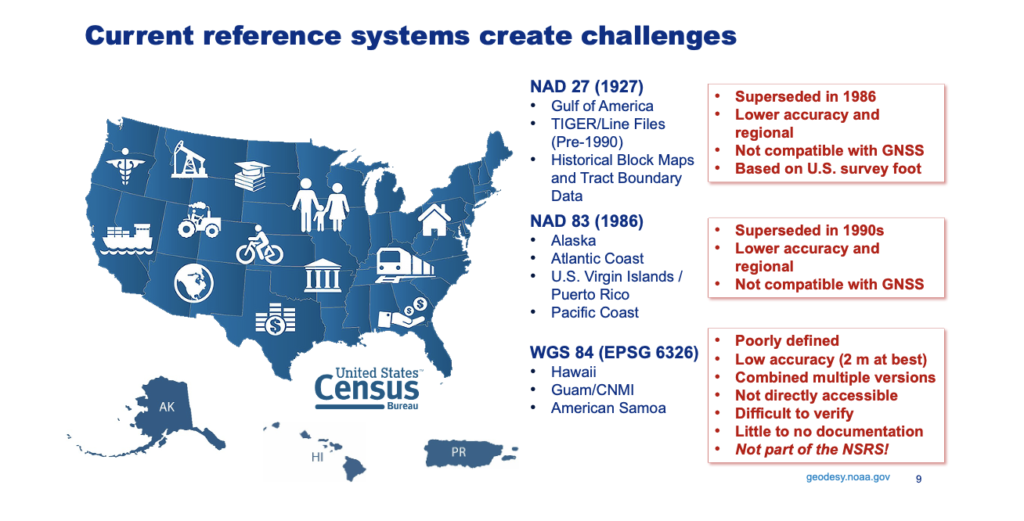
- For example, working with the Census under the current national spatial reference system highlights the geographic scope of some operational areas, which span multiple tectonic plates as modeled in the modernized NSRS. Even small regional differences can affect how location-based data are collected, integrated, and compared — especially for programs that need consistent, long-term geospatial baselines. Today, federal agencies commonly use three reference systems — NAD27, NAD83, and WGS84, which complicates geospatial data management.
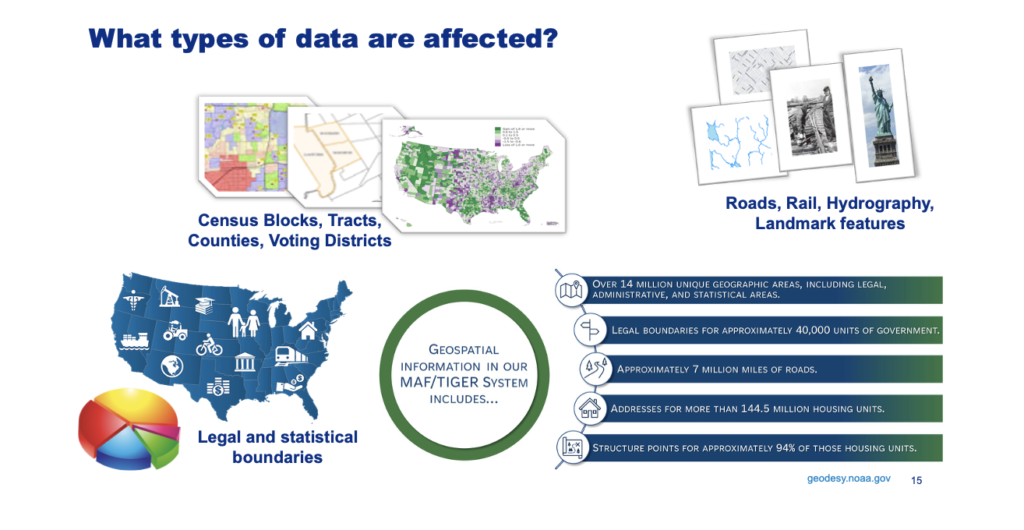
- The Census is a major user and producer of geospatial data, relying on GIS to support operations. This includes the MAF/TIGER geographic database, which contains roads, rail lines, hydrography, landmark features, and legal and statistical boundaries.
- Along with many other critical datasets, the Census’s collaborative spatial and statistical research is more effective and interoperable when grounded in a common reference system, such as the National Spatial Reference System.
- Because these datasets are inherently geospatial, many, especially those requiring high positional accuracy or relying on external references such as airborne or satellite data, will be affected by NSRS modernization. The update will enable more consistent data stewardship and support integrated spatial analytics, helping align with individual agency spatial data strategies. Bureau-level geospatial work becomes more effective and future-ready when supported by a modern, shared spatial reference system like the NSRS.
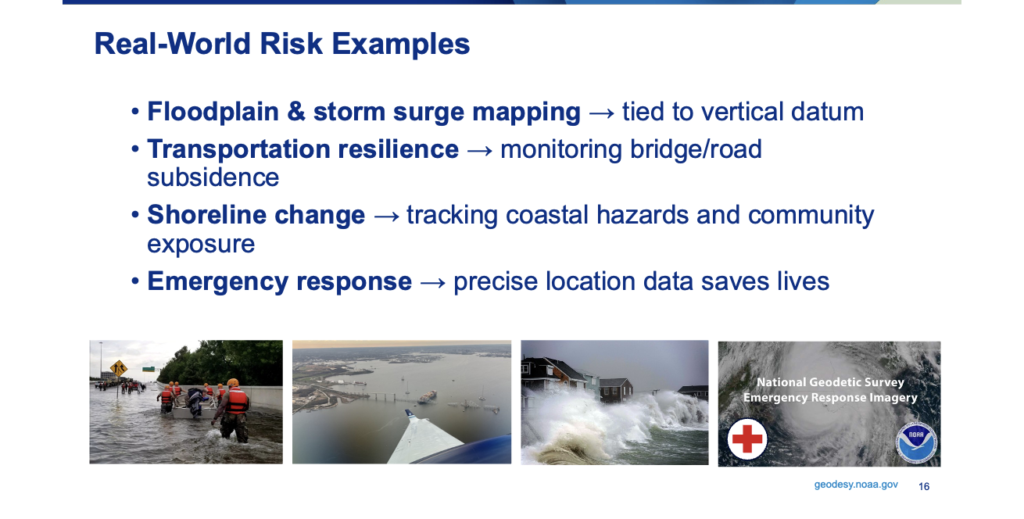
- One of the biggest risks is cultural, not technical. If the NSRS is treated as just another dataset, rather than an enabling framework, the foundation for other systems weakens. When the NSRS is recognized as the framework, everything built on it has a solid base. You can’t manage risk if you can’t measure it—and the NSRS is how we measure. Here are a few practical examples.
- Floodplain mapping and storm surge models depend on accurate vertical data. Errors of even a foot can leave neighborhoods unprotected or cause unnecessary regulation.
- In transportation, subsidence is a hidden risk: roads and bridges may seem fine until precise geometric monitoring reveals sinking.
- Shoreline change is a growing challenge; coastal communities need accurate shoreline monitoring for planning and insurance.
- In public safety, emergency response relies on precise locations — from 911 calls to field deployments. Seconds and meters matter when lives are on the line.
- As Roman mentioned, Caccamise also stated that the modernized NSRS is being released in phases. Initial beta releases are available now for testing and evaluation—not final production. NGS plans to release the remaining components in beta during this calendar year. The modernized NSRS will replace the current datums at least six months after the final preliminary component is released, giving partners time to review the beta and provide feedback. Near the end of this period, FGCS will convene to discuss and socialize the modernization details and the planned datum replacement.
Next steps for your agency’s modernization:
- Evaluate operational needs and identify changes that aren’t necessary.
- Assess organizational impacts and staff readiness—are teams prepared for modernization?
- Determine how existing programs and regional support will be affected.
- Collaborate with partner agencies to align shared datasets, reduce redundancy, and maximize efficiency.
- Prioritize leadership and communication to ensure the organization understands the changes.
- Plan for future improvements in spatial accuracy, even if you don’t need them immediately.
- As noted by Dan Roman, Dana Caccamise also highlighted that many lower-accuracy datasets may not require coordinate changes beyond updating their metadata—typically those with spatial accuracy on the order of 10 ft or worse. However, he also noted an important caveat: many operational workflows don’t actively read or enforce metadata. In those cases, the risk is not the dataset itself but the accuracy context that becomes embedded as data moves through systems.
- An early, critical step is therefore to identify not only which datasets are likely unaffected but also how those datasets are consumed, transformed, and reused. That approach prevents unnecessary work and avoids unintended downstream impacts. Remember: NSRS modernization is more than a technical update, it’s an opportunity to strengthen your agency’s future geospatial capabilities.
- Now, I know this newsletter is long, but I would like to highlight one more presentation that I believe provides a model for other agencies to follow. That is, the presentation of the Department of Interior’s Bureau of Ocean Energy Management (BOEM) activities presented by Kyle Vint (Vice President, Kearns & West) – “From Proactive Engagement to Lasting Impact: BOEM’s Path to Datum Readiness.”
Kearns & West is a communications and engagement specialization firm. The materials that they develop to support internal communications and outreach within an organization are available for other organizations. They provided a QR code for others to access their resources.
Vint outlined BOEM’s operating context and described how the agency is proactively addressing NSRS modernization, including several strategies.
BOEM’s challenges are partly historical: until about 2010, it was part of a parent agency that has since split into three separate agencies. That fragmentation means BOEM must coordinate data and change management not only internally but across three agencies that share data centers and geospatial datasets. BOEM relies on authoritative geospatial data to manage offshore energy and mineral activities on the Outer Continental Shelf; BOEM’s Geospatial Services Division supports this by maintaining leases and boundaries that underpin program decision-making. Because the ocean serves many purposes, BOEM relies on multiple layers of information from different agencies to support those decisions.
BOEM’s path to modernization is further complicated by internal organizational factors. The agency struggled with the NAD27-to-NAD83 transition due to resource constraints and misunderstandings — some staff believed modernization would alter legal lease blocks, which they expected to be immutable — so the transition was not fully implemented.
BOEM holds large datasets in both NAD27 and NAD83, fragmenting its workflow. Maintaining and converting between multiple reference systems is labor-intensive and introduces inconsistencies.
BOEM must dedicate substantial staff time to managing data in multiple reference systems. BOEM’s Geospatial Services Division recognized early that continuing workarounds would increase risk over time, so they began proactive modernization planning.
The Geospatial Services Division saw this as more than a technical issue — it’s also a people, communication, and resourcing challenge. BOEM shifted from fragmented efforts to a proactive, multi‑year planning approach emphasizing governance, leadership buy‑in, and clear communication. The Geospatial Services Division established a milestone‑based approach for consistent messaging and coordination across stakeholders and offers internal expertise to support programs and regions as they assess costs and technical complexity.
Their strategy seeks common ground to pool resources for shared problems and to use the Geospatial Services Division as an internal augmentation so individual offices aren’t forced to opt out. This reduces cost uncertainty and enables realistic planning for timelines and required participants.

As part of the process, user personas were created to identify who would struggle with each step and who would benefit from early, sustained engagement. For each group, they defined the value of participating and explained why they were invited.
BOEM leaderships were treated like investors—they ensured they brought geospatial experts to meetings so questions could be answered, and so leadership had actionable budget information for long‑term planning. At the program and regional level, data experts who know existing datasets, reference systems, dependent applications, and potential workflow challenges were part of the process.
They also documented internal roles so others can model the approach. The Geospatial Services Division coordinates the effort across the organization. Program and regional experts provide domain knowledge. Kearns & West (technical and communications contractors) supported messaging, prepared materials, and ran meetings so BOEM staff could focus on the conversation. Clear roles and sustained engagement have been critical in this multi‑year planning effort.
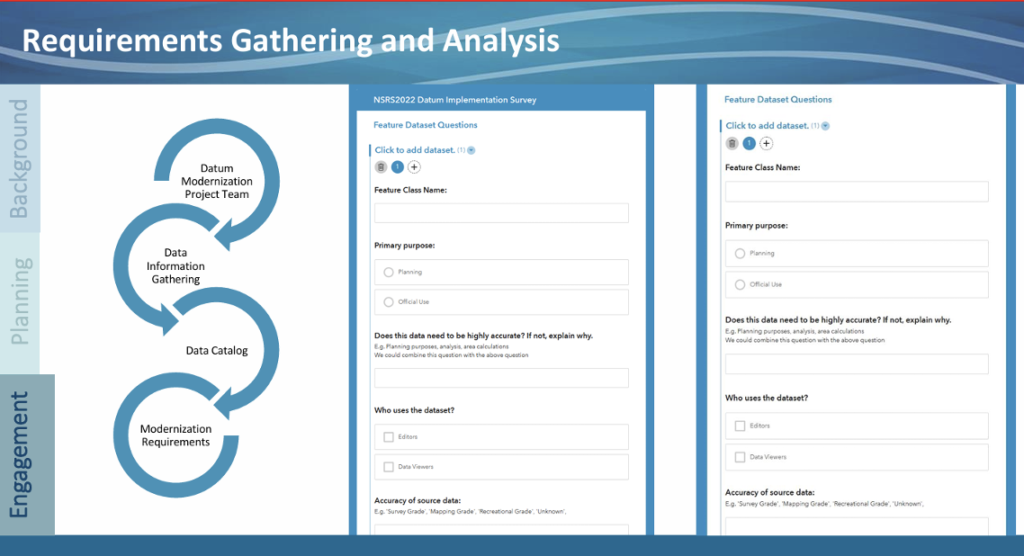
The team developed a Survey and sent it to each program and region to gather resource requirements. The survey asked what data they have and its characteristics, which applications or workflows depend on that data and could be affected by modernization, and what technical resources they expect will be needed to support budgeting.
As part of the process, they are building internal champions to advocate for the effort, simplifying complex issues so staff can brief leadership, and convening agencies, partners, and industry to co-create solutions.
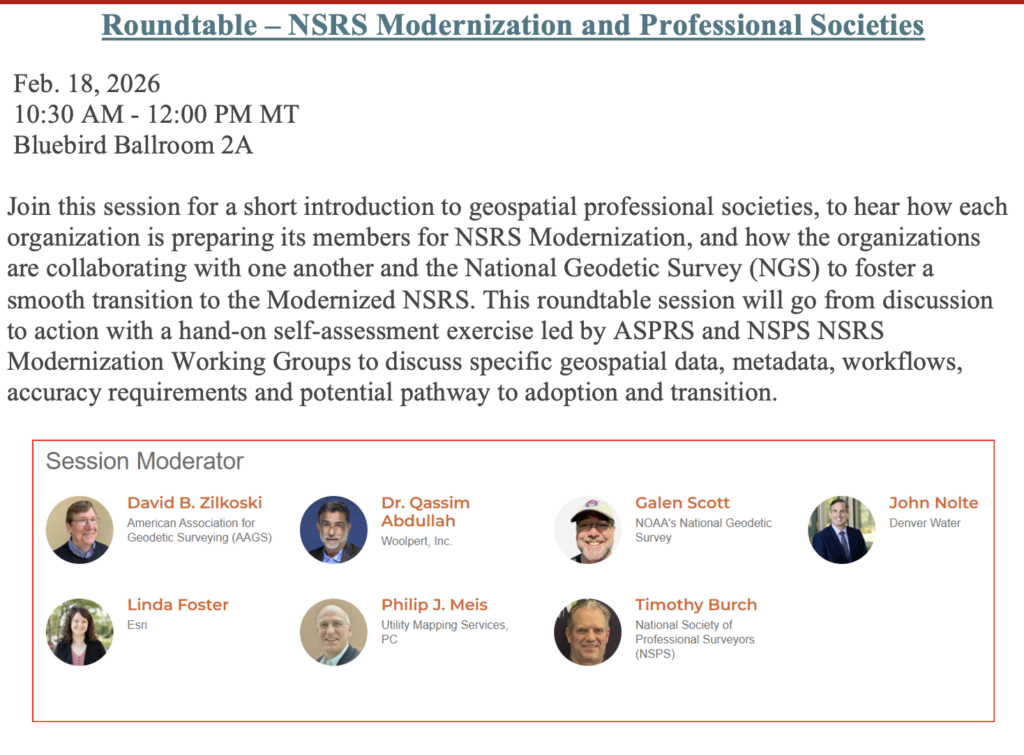
Finally — thanks for sticking with this lengthy newsletter. I know it’s long, but the information is important for federal agencies and their contractors. One more item: a key session is scheduled for GeoWeek — “Roundtable – NSRS Modernization and Professional Societies” — on 02/18/2026 at 10:30 AM. See the box titled “Roundtable – NSRS Modernization and Professional Societies” for presentation and speaker details.