Swift Navigation is collaborating with Nvidia to enable a more scalable, cost-effective approach to autonomous driving by integrating the Nvidia Drive AGX platform with Swift’s globally referenced, centimeter-accurate GNSS positioning.
Swift Navigation offloads absolute localization to the GNSS sensor stack using its Swift Automotive Suite. The suite is a complete, modular software solution for safe, high-integrity precise vehicle localization that combines the centimeter-level Skylark Precise Positioning Service with the Starling positioning engine, software that fuses raw GNSS data and corrections with inertial sensors (IMU) and wheel odometry to deliver high-integrity, centimeter-accurate positioning (PVT).
By entrusting lane-level positioning to Swift’s high-precision stack, the vehicle’s optical sensors are relieved of the absolute positioning burden. This allows the perception stack to be optimized for obstacle detection and immediate safety, significantly reducing overall system cost and complexity.
Integration with Nvidia Drive AG
The integration is delivered through the Starling SAL Plugin for Nvidia DriveWorks. The Nvidia Drive AGX platform is the industry-standard, end-to-end platform for software-defined vehicles, scaling from assisted to fully autonomous operation. DriveWorks, its comprehensive SDK, provides a unified sensor abstraction layer (SAL) for seamless ingestion of data from all sensor types.
Swift’s new plugin acts as a drop-in component within this architecture. Sitting between the vehicle’s raw GNSS sensors and higher-layer software, such as that for localization, the plugin invisibly handles the complex mathematics of GNSS corrections and sensor fusion, outputting a clean, corrected position stream directly into the standard DriveWorks interface.
“We are removing the single biggest hurdle to widespread autonomy: the complexity and cost of localization,” said Holger Ippach, EVP of Product and Marketing at Swift Navigation. “By delivering Starling’s natively integrated, high-integrity GNSS to Nvidia DriveWorks, we are giving OEMs a direct path to globally referenced, lane-level positioning that is simple, scalable, and affordable.”
The collaboration and the Starling SAL Plugin unlock several advantages for automotive OEMs leveraging the Nvidia Drive platform:
Cloud-native ASIL safety. Skylark is an ASIL-certified positioning service built entirely in the cloud, offering scalability and reliability at a lower cost than solutions reliant on physical data centers.
Comprehensive sensor fusion. The Starling Positioning Engine delivers robust, high-integrity positioning by fusing precise GNSS with IMU and wheel odometry, ensuring continuous, lane-level accuracy even in signal-challenged environments.
Plug-and-play precision. Developers no longer need to build localization stacks from scratch. High precision is toggled on simply by adding the Starling plugin to the DriveWorks configuration.
Hardware independence. Because Starling is software-defined, Nvidia customers can achieve high performance using a wide variety of mass-market GNSS receivers, rather than being locked into expensive, proprietary navigation units.
Pre-validated integration. The Starling plugin has been rigorously tested and validated within the DriveWorks environment. This eliminates the complex, months-long burden of validating custom sensor drivers and fusion algorithms, allowing engineering teams to focus immediately on high-level path planning and control.
The Starling SAL Plugin for Nvidia DriveWorks is available now.
Today’s commercial innovation requires infrastructure that moves at the same pace.
Essence
The rise of commercial satnav
Everyday life is saturated with location-dependent devices. They are multiplying faster than ever and their requirements have surpassed what GPS can support. Innovation in low-Earth orbit (LEO) satellites have seen exponential growth in the last ten years, unlocking new possibilities in further connecting our world.
In 2016, the total number of satellites operational in space from commercial and government operators was approximately 1,500. This number had been stable for decades, with linear growth since the launch of Sputnik in 1957. Today, there are now more than 8,000 satellites operational in space — with nearly all growth happening in LEO.
There are multiple reasons why. The cost of space access has decreased with reusable rockets and greater competition. The demand for connectivity has driven deployment of multiple constellations to deliver Internet from space. Latency is extremely important in communications and resolution in Earth observation.
While innovation in LEO satellites has primarily focused on connectivity and Earth observation, there is a generational opportunity to innovate in the position, navigation and timing (PNT) infrastructure that silently powers modern life.
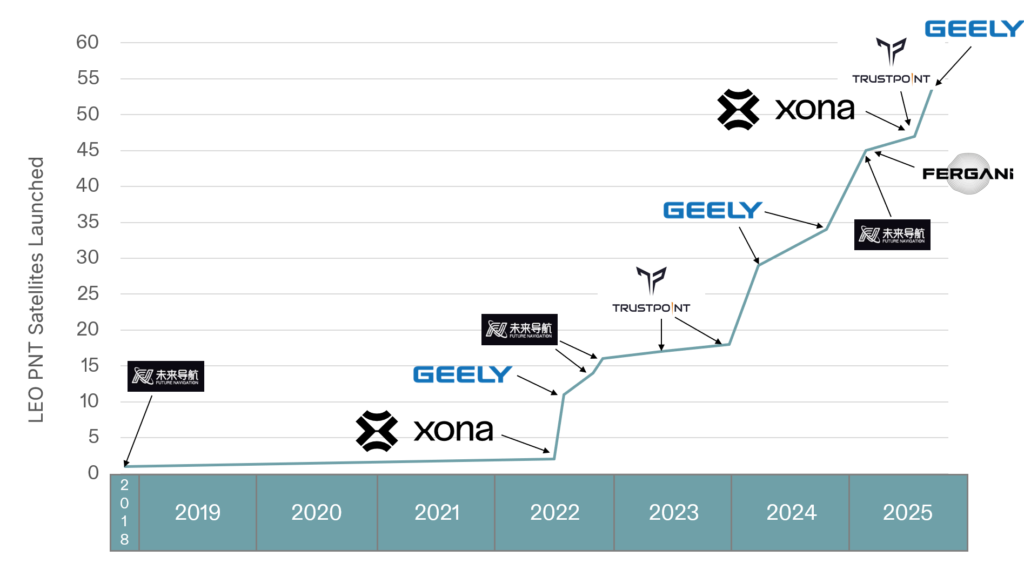
There are now more than ten entities working toward deployment of dedicated PNT functions in LEO, amounting to more than 2,500 satellites if every constellation was complete today. As shown in Figure 1, five of these entities have already collectively launched more than 50 satellites. This market signal is not surprising, as demand for greater precision, power and protection are becoming fulfilled with diversification in LEO.
Figure 1. Launches of LEO PNT satellites.
Essentials
Medium-Earth orbit (MEO) has been the traditional choice of satellite navigation for global systems, with GPS, Galileo, BeiDou and GLONASS all being deployed in this regime. This altitude in the outer Van Allen belts is the harshest radiation environment Earth orbit satellites are subjected to and is a major driver in the cost and complexity of the satellites. From a commercial standpoint, deployment in LEO is more attractive as the more benign radiation environment allows for the use of more commercial off-the-shelf (COTS) parts in satellite designs, facilitating volume production. With a healthy ecosystem and supply chain now developed around LEO for both satellites and launch vehicles, the opportunity for commercial PNT to set a new standard in performance and protection is open.
The time for innovation in PNT could not be more urgent. Innovators are pushing the frontiers of technology across every industry and market. Physical intelligence is proliferating in the form of self-driving cars, humanoid robotics, automated farming, unmanned aerial systems and more. As these systems begin to coexist in the real world, the tools they rely on have never been more at risk. Commercial aviation is regularly jammed in Europe and the Middle East due to ongoing conflicts. And ships at sea are struggling to adapt to an environment where spoofing is commonplace.
The commercial world has different and increasingly more stringent requirements than government-focused systems like GPS. GPS was designed primarily around military requirements and is longstanding infrastructure that is difficult to change with the myriad number of deployed devices that depend on it. This responsibility makes GPS too big to fail, but also incredibly difficult to change.
GNSS infrastructure has unlocked so much in commercial activity. There are now more devices using GNSS than the Internet, and GPS is by far the majority user of the technology (based on nearly 7 billion active GNSS devices on Earth and around 6 billion users of the Internet.) However, commercial users have limited input to the evolution of GNSS constellations, which has led to a widening gap between technology and wants, which provides for the current commercial opportunity.
Simply put, today’s commercial innovation requires commercial infrastructure that moves at the same pace to support.
Elements
Architecting LEO PNT
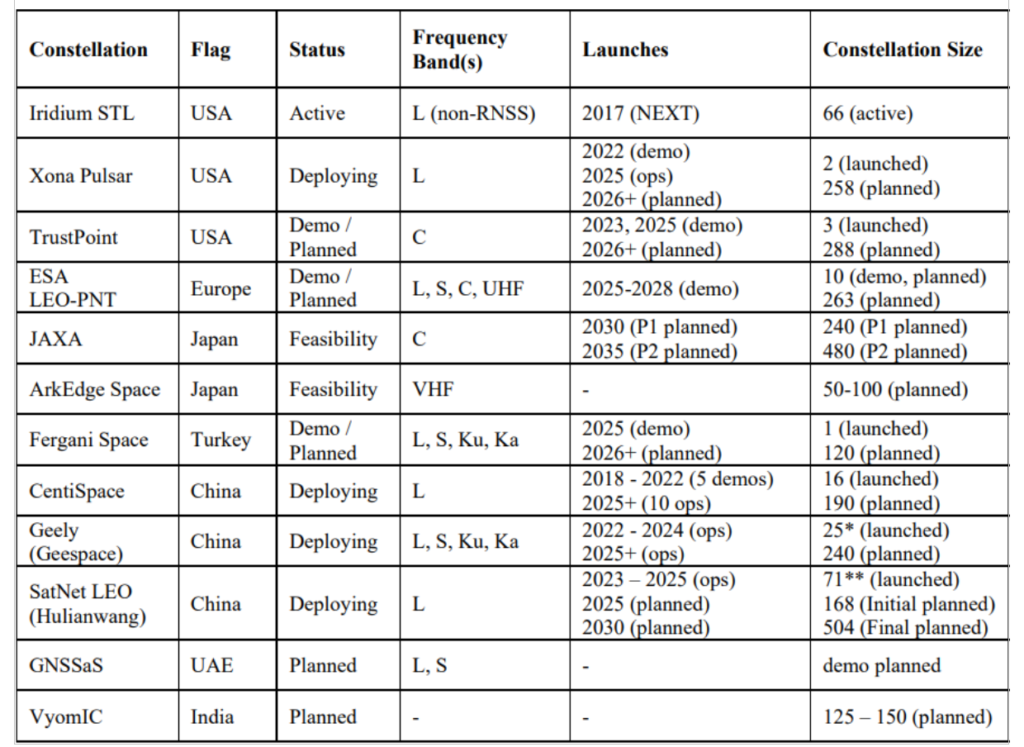
For a LEO satellite navigation system, many designs could be considered, as reflected in Table 1 from Reid et al. (2025) outlining current public information about systems already announced. These constellations range from government-supported systems, which could act as extensions of already deployed global or regional systems, to commercial systems that target potentially unique, independent markets.
Table 1. Comparison of dedicated LEO PNT systems, deployments, and plans. Note that satellites already deployed were verified on celestrack.org .
These constellations all have one thing in common: they aim for between 200 and 300 LEO satellites. The reason is simple: as LEO satellites have a footprint of approximately 1/10th that of medium Earth orbit (MEO) satellites, and between 20 and 30 MEOs are required for global PNT, approximately 10x more LEOs are needed to obtain similar coverage. A consequence is that in LEO, the radio energy is spread over 1/10th the area compared to MEO, which has implications for power needs at the satellite — 10x less in LEO for the same MEO power in the same band.
There is another crucial parameter to consider in LEO PNT design: spectrum. Table 1 shows that many approaches are being considered. Xona’s approach with its Pulsar constellation was centered around three major areas of commercial appeal: seamless operation with existing devices; increased native accuracy; and added resilience to jamming and spoofing. An important philosophy adopted early in the company’s culture was to not make development a science project — that is, do not reinvent the wheel, but rather upgrade the engine. GPS was a revolutionary technology, which is why it is so heavily adopted and brings so much value to the world. Therefore, stand on the shoulders of this giant to look out to the future.
Ease of integration was the first consideration, as it has been the most important aspect in accelerating adoption of any new system. And spectrum is key to Integration. By launching a new system that uses the existing L-band signals, the GNSS ecosystem producing approximately one billion new units per year can seamlessly upgrade their capability without new hardware. Xona’s first technology pathfinder satellite in 2022 validated this hypothesis. While the pathfinder mission supported two satellite frequencies already in the regional navigation satellite system (RNSS) bands — one near L-band E6 and the other in the yet unused C-band near 5 GHz — it became apparent that receiver companies were willing to develop hardware for the L-band signal, and did so quickly with their existing hardware. There was resistance and longer timelines to global adoption for C-band signals.
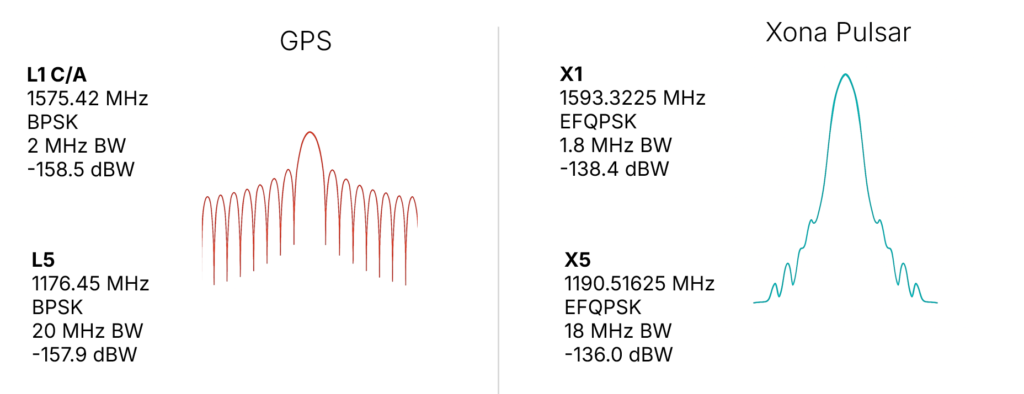
In response, Xona shifted the production signals to a dual L-band system, which already has nearly a dozen commercial receiver partners tracking the recently launched production satellite — some within weeks of the launch. The challenge is to choose a waveform that is near existing GNSS bands, familiar in form and function and digital signal processing techniques to what is already fielded today, and to not cause harmful interference to the existing GNSS services in orbit. The resulting design is shown in Figure 2, on the right. The key innovation was the selection of a bandwidth efficient form of quadrature phase shift keying (QPSK), which focuses the energy in the central lobe and rolls off quickly compared to a traditional binary phase shift keying (BPSK) signal, shown in Figure 2 on the left for comparison. The result is a 100x stronger signal that does not cause harmful interference to existing GNSS signals, while offering resilience through more signal power. This selection process was iterative, taking feedback from the receiver community. More information on the design and testing for compatibility can be found in Reid et al. (2025).
Figure 2. (Left) GPS BPSK-based signal waveform, and (right) Pulsar QPSK-based signal waveform.
In addition to compatibility and ease of integration, accuracy and resilience are critical design drivers. For example, farmers rely on their equipment positional accuracy to efficiently distribute seeds, fertilizer and water, reducing waste and improving crop yields. Positional accuracy also enables accurate, repeatable field operations year after year, saving time, fuel and money while protecting the soil. Because GNSS typically offers meter-level positioning, today many farmers buy positional accuracy through GNSS correction services to obtain centimeter-level positioning. The Xona architecture leverages these techniques in precise point positioning (PPP), delivering precise ephemerides direct from the space segment, and combining them with the fast motion from LEO satellites (compared to MEOs) to reduce position solution convergence times from ~10 minutes to nearly instantaneous (see, for example, Mah and O’Keefe, 2025). This geometry also boosts coverage, as correction services today typically rely on geostationary satellites and do not service high latitudes, where they would benefit missions such as mining operations for critical minerals and polar navigation.
Connectivity relies on resilient timing. Passing more data through a network means efficiently meshing data packets in synchronized manner. Telecommunications and data centers need such connectivity to function. Authentication is expected in our communications systems, which is largely unavailable in civil GNSS signals. In an age where GNSS spoofing is done to cheat at games like Pokémon Go and now more frequently for nefarious purposes, authentication becomes essential for a modern system (Anderson, 2025, and Xona, 2025a). For resilience to spoofing, Xona included not just data authentication, but also range authentication, so that users can ultimately authenticate their position.
Defense applications require resilience to jamming. World conflicts, particularly currently in Ukraine and the Middle East, have showcased GNSS vulnerabilities in the presence of widespread GNSS jammers. However, this problem is no longer only a defense issue. In 2025, nearly 123,000 commercial flights in Europe were disrupted between January and April alone by GNSS jamming (GPS World, 2025). For resilience to jamming, one method is more power. LEO being 20x closer to Earth than MEO affords nearly a 10x boost in power for the same power transmitted at the satellite. Xona’s target was 100x more power to the end user to significantly reduce the effective range of a jammer by more than six times as shown by recent field trials. Such a transmission power translates to a >97% reduction in affected area and means threats shift to larger and less practical platforms for adversaries, i.e., from requiring handheld devices to backpacks or even truck-sized jammers.
More signal power also has implications for indoor positioning. Internet of things (IoT) devices such as asset trackers are commonly affected by signal obstruction and attenuation during transit, particularly in indoor environments, urban canyons, under foliage, or when obstructed by vehicles and cargo. Warehouses, shipping containers, and other constraints limit where position can be determined. Even coarse indoor positions can support operational intelligence for asset management.
Launching LEO PNT
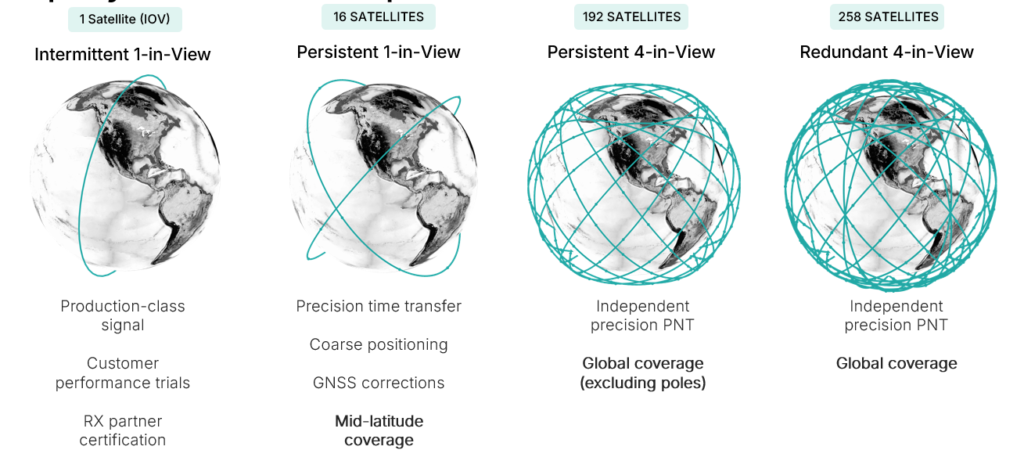
Pulsar is designed to launch in stages as shown in Figure 3, which unlocks capability in tranches that expands the number of features and ultimately the user base. While Pulsar will achieve persistent coverage across major markets at the deployment of 16 operational satellites, earliest customers in time transfer will see value from Pulsar much sooner as an independent source of timing synchronization for devices with holdover clocks. At 16 satellites, Pulsar will achieve persistent 1-satellite-in-view service, unlocking precise time transfer and coarse positioning for stationary users, including indoors. Pulsar also provides a link to stream GNSS corrections, building on a partnership with Trimble. Full resilient positioning will come online with GPS-level satellite visibility. First in the midlatitudes, with 192 satellites, and then globally with the deployment of an additional 66 satellites into polar orbit, bringing the total to 258 operational satellites.
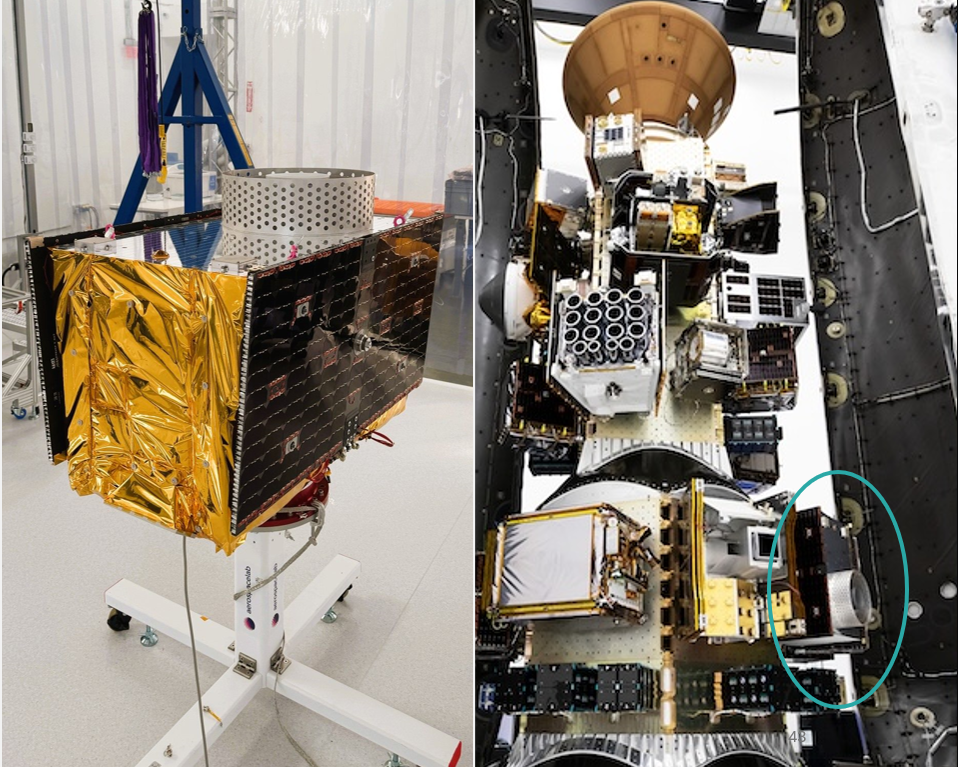
Xona launched its in-orbit-validation stage in June 2025 with Pulsar-0, the first production-class satellite representative of the scaled capability in terms of signal modulation, power and features. Pulsar-0 allowed for performance validation of the complete system, not just of the payload in space but also the tangible benefit to users on the ground. For scale, Figure 4 shows the 150 kg class satellite pre-launch, including its integration on the Falcon 9 launch vehicle. Launch cost has been become more accessible, unlocking the ability to launch larger spacecraft by commercial entities, which can have larger positive impact on the ground (Xona, 2025b).
Figure 4. Xona’s first production satellite Pulsar-0.
LEO PNT on-orbit
In almost 6 months since launch, Pulsar-0 has been tracked in more than 6 countries, 12 third-party receiver protypes, and has achieved several performance milestones that signal the groundbreaking capability Pulsar will deliver to users everywhere when the full constellation is operational. Early performance tests are built to showcase the value and features most important to commercial users in realistic settings.
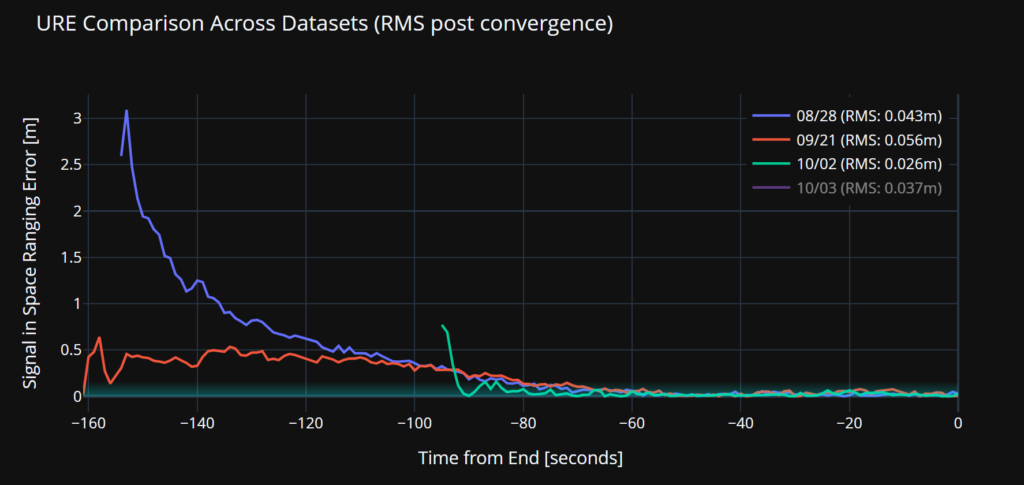
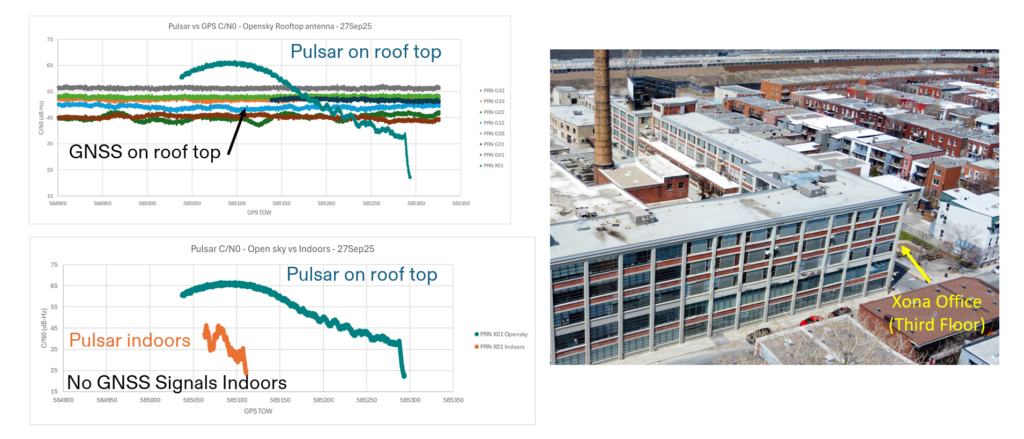
Accuracy. Figure 5 illustrates a signal-in-space user-range-error (SISRE) of 43 mm — about the diameter of a golf ball. This performance represents a more than tenfold increase in accuracy compared to that reported by GPS (Refro et al., 2024). The implication is an ability to natively perform PPP at the centimeter level, without an additional data link or correction layer.
Figure 5. Estimate of SISRE for Pulsar-0 ranging signal compared with nominal GPS.
Security. Xona is the first organization to show pseudorange authentication from orbit, accomplished using the Pulsar-0 satellite within weeks of the launch (Anderson, 2025). Pulsar is built from the ground up to be secure by design, combining cryptographic authentication of both navigation data and satellite ranging signals with rapidly authenticated signal verification — aiming for a time-to-authentication of approximately four seconds. This layered security significantly raises the technical and financial bar for would-be spoofers. A spoofer spoofing a single satellite continuously should succeed in fooling one second of a Pulsar receiver’s ranging once every 130 years (Xona, 2025a).
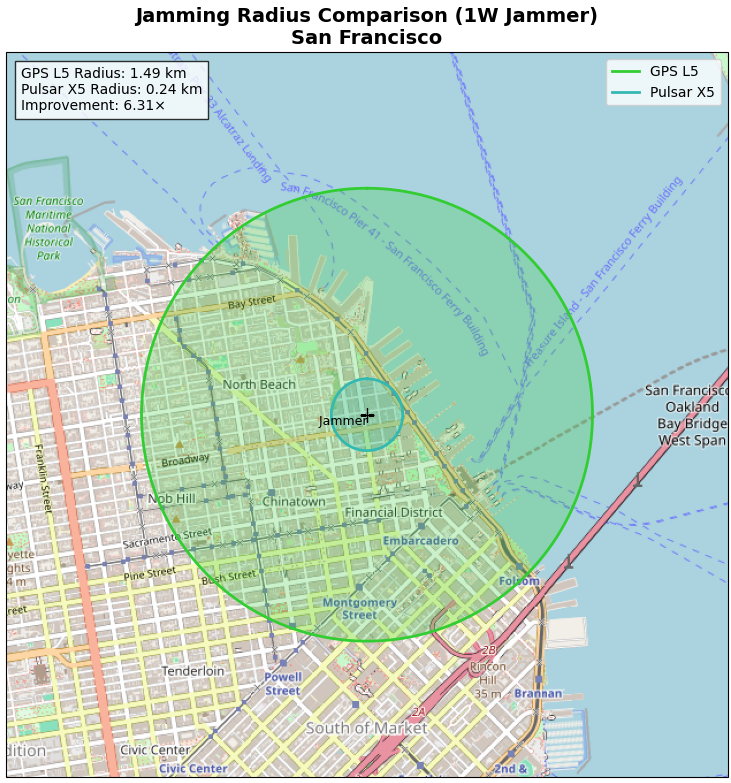
Jamming. Pulsar-0 signal testing has been conducted under live-sky jamming conditions at several jamming events, including Jammertest 2025 in Norway. These campaigns confirmed that using the Pulsar X5 signal can reduce the effective radius of a jammer by 6.3 times as compared to GPS L5 — in other words, less than 3% of the affected area compared to GPS. The same targeted power, bandwidth and type of jammer waveform was used against GPS and Pulsar, including center frequency. For context, Figure 6 shows the implications for a 1 Watt jammer scenario in San Francisco and the reduction brought by a 6.3x reduction in radius.
Figure 6. ffective jamming areas for Pulsar X5 and GPS L5 from a 1 W jammer in San Francisco based on Jammerfest 2025 test results.
Indoor. Data were collected for several navigation passes per day at multiple locations, including indoors. These include passes at Xona headquarters in Burlingame, California, and its office in Montreal, Canada. The most challenging indoor environment was Montreal, on the third floor of an industrial and primarily concrete building with two floors above. Figure 7 shows the Pulsar-0 power profile during a typical pass, peaking at the highest point in the sky. This structure is an artifact of the antenna gain pattern used in this mission. Designed for a higher altitude for deployment of later satellites, the pattern will be more isotropic with future satellites launched near 1100 km altitude compared to Pulsar-0, which is closer to 500 km. Near apex, the signal penetrates indoors, and this short segment proves to be sufficient for indoor positioning for stationary users. Leveraging techniques based on Doppler and including pseudorange, early results indicate sub-10 meters both outdoors and indoors.
Figure 7. Comparison of Pulsar and GPS signal strengths on roof and indoors at the Xona Montreal office.
EVOLUTIONARY
The coming years will be about gaining operational experience and in scaling the constellation with a near-term focus on the first batch of 16 satellites. Pulsar-0 has already confirmed its value proposition: attaining major milestones in performance including accuracy, security and jamming, but perhaps most importantly in the integration of user equipment. The next year is about working with customers in specific industries and use cases as Xona moves towards deployment of early operational service.
The future of LEO PNT is bright. Theory has evolved to prediction, which is now evolving to reality. The early results appear to lead to an exciting PNT future with LEO PNT expanding the GNSS revolution in terms of security, interference mitigation and system availability both outdoors and indoors for a myriad of current and new applications and users.
Further Reading
Anderson J (2025). World’s First Authenticated Satellite Pseudorange from Orbit, Proceedings of the 38th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2025), Baltimore, Maryland, September 2025, pp. 738-748.
Eissfeller B, Pany T, Dötterböck D and Förstner R (2024). A Comparative Study of LEO-PNT Systems and Concepts, Proceedings of the ION 2024 Pacific PNT Meeting, Honolulu, Hawaii, April 2024, pp. 758-782.
Li W, Yang Q, Du X, Li M, Zhao Q, Yang L, Qin Y, Chang C, Wang Y, Qin G (2024). LEO augmented precise point positioning using real observations from two CENTISPACE™ experimental satellites. GPS Solutions, 28(1): 44.
Mah C, O’Keefe K (2025). Hardware Simulation of Low-Earth-Orbit GNSS for Carrier Phase Ambiguity Resolution, Proceedings of the 38th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2025), Baltimore, Maryland, September 2025, pp. 2431-2443.
Prol FS, Ferre RM, Saleem Z, Välisuo P, Pinell C, Lohan ES, Elsanhoury M, Elmusrati M, Islam S, Çelikbilek K, Selvan K, Yliaho J, Rutledge K, Ojala A, Ferranti L, Praks J, Bhuiyan MZH, Kaasalainen S and Kuusniemi H (2022). Position, Navigation, and Timing (PNT) Through Low Earth Orbit (LEO) Satellites: A Survey on Current Status, Challenges, and Opportunities, IEEE Access, (10): 83971-84002
Reid TGR, Chan B, Goel A, Gunning K, Manning B, Martin J, Neish A, Perkins A and Tarantino (2020). Satellite Navigation for the Age of Autonomy, 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, Oregon, April 2020, pp. 342-352.
Reid TGR, Gala M, Favreau M, Kriezis A, O’Meara M, Pant A, Tarantino P and Youn C (2025). Xona Pulsar Compatibility with GNSS. Proceedings of the 38th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2025), Baltimore, Maryland, September 2025, pp. 929-943.
Reid TG, Neish AM, Walter T and Enge PK (2018). Broadband LEO constellations for navigation. NAVIGATION: Journal of the Institute of Navigation, 65(2): 205-20.
GNSS corrections company Rx Networks is collaborating with Zephr.xyz, whose software-based positioning SDK enables sub-meter accuracy on Android devices without requiring specialized hardware.
Through this collaboration, Zephr.xyz has integrated Rx Networks’ TruePoint correction services, extending high-precision GNSS capability worldwide with the reliability, availability and continuity required for commercial-scale deployment.
Operating on a global scale, Rx Networks is a provider of GNSS positioning services for tier-1 OEMs, telecom operators, and enterprise customers. Its services are engineered to ensure a five-nines (99.999%) service level agreement for availability, supporting mission-critical and safety-critical applications where continuity, resilience and predictable performance are essential.
Unlike free, experimental or regionally constrained solutions, Rx Networks’ infrastructure is designed for global availability and long-term operational reliability, making it suitable for large-scale commercial deployments.
TruePoint is Rx Networks’ comprehensive high-precision positioning portfolio, designed to support a broad spectrum of customer requirements. Rather than a one-size-fits-all product, TruePoint has solutions that span
global, regional and localized GNSS correction services
accuracy tiers from decimeter-level to centimeter-level performance
multiple deployment models and price-performance options.
TruePoint is designed to evolve alongside customer needs, supporting everything from early-stage experimentation to large-scale production deployments. While Zephr.xyz leverages TruePoint | FOCUS, the collaboration is not limited to a single TruePoint variant, preserving flexibility as applications mature.
Quectel Wireless Solutions has launched a 5G-advanced (5G-A) automotive-grade cellular module, the AR588MA. The module integrates dual-band GNSS supporting both L1 and L5 bands with up to 30 Hz output.
Based on MediaTek’s latest-generation MT2739 platform, the AR588MA supports 5G-A communication technology and complies with the 3GPP R18 standard protocol. It features both NB-NTN and NR-NTN satellite communication capabilities and supports dual-SIM dual-active (DSDA) technology, offering improved stability and reliability on cellular connections. It also includes intelligent driving scenario recognition.
Designed in compliance with the AEC-Q104 Grade 2 automotive standard, it delivers fast, stable connectivity and reliable security for in-vehicle communication and benefits on-roof applications, like smart antennas for automotive, with higher temperature support.
Winners of the U.S. defense Counter-small Unmanned Aircraft System (C-sUAS) Low-Cost Sensing (LCS) challenge have been announced.
MatrixSpace Inc. was selected as the overall winner and will receive the top award of $500,000. Following the overall winner, the top three performers — Guardian RF, Hidden Level and Teledyne FLIR Defense — will each receive award amounts of $100,000.
The selected systems secured a place among the 10 finalists who advanced to live testing during USNORTHCOM’s Falcon Peak 25.2 exercise, outperforming 115 submissions. The system demonstrated capability in detection, classification, localization, scalability, cost and integration readiness.
Sponsors of the award include Defense Innovation Unit (DIU), U.S. Northern Command (USNORTHCOM), Joint Interagency Task Force 401 (JIATF-401), U.S. Army, U.S. Navy, U.S. Marine Corps and U.S. Indo-Pacific Command.
“Small UAS threats are evolving faster than traditional acquisition cycles, and meeting that challenge requires capabilities that can be deployed at speed and scale,” said David Payne, acting director of DIU’s Autonomy Portfolio. “The selected solutions show how commercial innovation can strengthen our layered defense — delivering affordable sensing that we can field widely, adapt quickly, and keep the warfighter ahead of the threat.”
The MatrixSpace platform combines ultra-low SWaP-C radar, AI-driven edge intelligence, and distributed networked CUAS powered by AiCloud. During the evaluation, it successfully detected, tracked and classified every sortie flown —including RF-dark fiber FPVs, commercial drones, and custom-built UAVs.
A scalable, distributed approach to counter-UAS sensing
The LCS challenge, launched in May 2025, was designed to complement existing sensor systems by identifying emerging technologies that enable broad, distributed, and resilient sensing architectures. During FP 25.2, the 10 selected finalists demonstrated solutions spanning radio frequency passive detection, active radar, acoustic sensing, optical and infrared modalities, and hybrid systems.
These technologies collectively showed potential cost savings of 50–80 percent in total cost of ownership, while still meeting key coverage and performance requirements for C-sUAS defense.
During live testing, vendors were evaluated against a variety of small UAS flown both individually and in coordinated multiples, employing diverse communication protocols. Finalists were not informed which platforms or profiles they would be tested against, ensuring performance was measured under realistic, un-scripted, and operationally relevant conditions.
Evaluated by experts and end-users, against a rigorous selection criteria,challenge winners differentiated themselves by demonstrating tailored technical strengths, high performance against threat-representative UAS targets and demonstrating a cost-effective architecture enabling deployment at scale across fixed, mobile, and austere environments.
About the LCS Challenge
The Counter-sUAS Low-Cost Sensing (LCS) challenge sought to identify emerging sensor solutions that could:
expand detection coverage
reduce total lifecycle cost
integrate seamlessly into joint C2 architectures
provide the resilience and redundancy required to counter small UAS threats.
Launched in May 2025, the challenge drew participation from traditional and nontraditional vendors across the country, representing the full spectrum of sensing modalities. The Falcon Peak 25.2 exercise provided a realistic environment to evaluate these capabilities under operationally relevant conditions.
For more information about DIU’s work accelerating commercial technology into the Department of Defense, visit www.diu.mil.
Hexagon has joined the Multilateral Memorandum of Understanding (MMoU) on Strengthening the Global Geodesy Supply Chain.
The MMOU is a shared recognition by the United Nations Global Geodetic Centre of Excellence (UN-GGCE) — alongside member state government departments and agencies, private sector companies, organizations, associations, and academic institutions — that action is required to make the foundations of positioning, navigation and timing services robust.
With HxGN SmartNet, Hexagon has built a reliable, scalable GNSS infrastructure that integrates physical reference stations, specialized software such as Leica Spider, and a secure environment for distributing precise positioning data. Supporting tens of thousands of users worldwide, SmartNet delivers the accuracy and continuity essential for daily operations across many sectors.
The MMoU signatories hope to advance resilient positioning services and strengthen geospatial capabilities for nations around the world. Through joint initiatives, they aim to:
Enhance continuity and accuracy of GNSS-based positioning services
Strengthen resilience against signal interference
Support countries in developing and maintaining geodetic infrastructure
Expand education and workforce development in geodesy.
These initiatives ultimately help end users access more consistent accuracy, higher service availability, and stronger resilience against jamming or spoofing.
The MMoU was signed by Henning Sandfort, president, Geosystems Business Area, Hexagon, and Dieter Fritsch, Hexagon’s representative to the UN-GGIM Private Sector Network, on Nov. 17.
“Joining the MMoU underscores our commitment to ensuring that accurate, dependable geospatial information is accessible to governments and organisations worldwide,” Sandfort said.
“Hexagon’s contribution under the MMoU demonstrates the importance of global collaboration between Member States, UN and the geospatial industry,” said Nicholas Brown, head of Office at the UN-GGCE. “Hexagon is a key player of GNSS technology and digital reality solutions and therefore mostly welcomed to contribute the future vision of a strengthened global geodesy supply chain.
The latest generation of Safe Pro’s AI technology will be presented at U.S. Army exercise at Fort Hood, Texas
Safe Pro Group, a developer of artificial intelligence (AI)-enabled defense and security solutions, has deployed upgraded AI algorithms to its patented Safe Pro Object Threat Detection (SPOTD) technology for drone operations in GPS-denied environments.
The newly enhanced SPOTD capabilities will be prominently featured at the upcoming U.S. Army 2026 Concept Focused Warfighter Experiment (CFWE) technology demonstration taking place at Fort Hood, Texas.
Operating on the Amazon Web Services (AWS) Cloud or at the Edge, SPOTD is Safe Pro’s patented rapid battlefield image analysis platform designed to identify and map small explosive threats such as landmines and ambush drones detected in videos collected from virtually any drone.
The ability for SPOTD to rapidly detect threats and create 2D/3D models from drones flying in GPS-denied environments was developed after real-world exercises in Ukraine at the request of end users. The integration of these new algorithms further enhances the value of SPOTD as a situational awareness tool for use in a wide array of military reconnaissance and planning operations.
SPOTD enhancements include:
Ability to process any drone video data: Turning video clips into 2D and 3D models with AI-trained explosive threat detections
Enhanced operational robustness: Operating capability in GPS and GPS/GNSS denied environments
Terrain modeling: Threat and terrain mapping in support of unmanned ground vehicles (UGVs) route planning
Rapid mapping-only mode: Mapping for intelligence, surveillance and reconnaissance (ISR) and missions that do not require AI-powered threat detections
Accelerated processing: Up to 10x reduction in processing time powered by Safe Pro’s proprietary geospatial AI algorithms.
Powering the company’s SPOTD technology is Safe Pro’s unique real-world datasets, which include high-resolution drone imagery and GPS-tagged geospatial data encompassing more than 2.2 million drone images analyzed to date, and 41,400+ threats identified across 11,400 hectares (28,000+ acres).
CPI Electron Device Business – TMD Technologies Division has successfully completed sea trials of its cquantum-hybrid inertial navigation system (INS) aboard the THV Galatea, operated by Trinity House, the General Lighthouse Authority for England, Wales, the Channel Islands and Gibraltar.
This milestone shows that quantum-enabled sensing hardware can operate stably in maritime conditions, with the potential to provide resilient positioning without continuous reliance on GNSS.
Research indicates that a 24-hour GNSS outage could cost the UK economy £1.4 billion through cascading effects on logistics, transportation and critical infrastructure, underscoring the need for GNSS-independent solutions. By proving that quantum sensors can operate in operational conditions aboard a working vessel, CPI TMD is advancing technologies that reduce reliance on satellite navigation and improve resilience across maritime, defense and commercial sectors.
The Harlequin System: Quantum-Enhanced INS
The Harlequin system is a quantum-classical hybrid INS designed to extend GNSS holdover — the ability to maintain accurate position when satellite signals are unavailable or unreliable. Developed under an Innovate UK funded project, with partners from industry and academia, including the University of Strathclyde, and Joseph Cotter’s group at Imperial College London, Harlequin integrates classic INS components (a precise clock, a ring laser gyroscope, and a MEMS accelerometer) with CPI TMD’s gMOT-based quantum accelerometer.
Onboard team for the sea trial. (Photo: CPI TMD)
The gMOT cold atom source, developed by CPI TMD, the University of Strathclyde and Kelvin Nanotechnology, is a grating-based magneto-optical trap that provides a source of ultra-cold atoms that forms the basis of a portable, rugged quantum sensor.
Conventional INS technology accumulates errors over time, causing position estimates to drift. By integrating its cold-atom accelerometer technology with classical INS technology, Harlequin leverages quantum-enhanced sensing to perform periodic drift corrections, extending the period over which a vessel can maintain accurate position in the absence of satellite-derived timing and positioning.
Real-world trials: Operating around a working vessel
The Harlequin trial demonstrates that quantum sensors can operate reliably outside the lab, functioning in the harsh conditions of real-world maritime operations—a crucial validation step toward field-deployable systems.
The sea trial took place aboard the THV Galatea, which is not a scientific test vessel but an operational ship with a demanding day job: keeping shipping routes safe by ensuring buoys and lights are correctly placed and maintained, surveying the seabed for hazards, marking wrecks, and supporting marine-infrastructure projects such as cables and pipelines.
The Harlequin system had to be loaded, tested and unloaded around the Galatea’s regular operational schedule, adding complexity to the trial and underscoring the system’s ability to integrate into real-world maritime workflows.
Next Steps: System Upgrades and Second Trial
Data gathered during the trial will inform a program of system upgrades aimed at improving performance and enhancing suitability for long-term shipboard operation. A second field trial is planned for the end of 2026 to validate improvements and bring it closer to operational readiness.
Genesys has developed India’s first large-scale high-definition maps engineered specifically for vehicles enabled with advanced driver assistance systems (ADAS).
Covering more than 1 lakh km of India’s national highways, expressways and strategic corridors, this initiative marks one of India’s most ambitious road intelligence programs and establishes a new benchmark for automotive-grade precision.
India’s highways account for a disproportionately high share of road fatalities, driven by fast-moving traffic, inconsistent lane discipline, and limited real-time awareness for drivers and vehicles. HD maps narrow this gap by adding the centimeter-level context that traditional maps cannot provide — lane geometry, curves, slopes, signage, barriers and localization cues that help ADAS systems anticipate danger instead of merely reacting to it. This is a big leap forward from current sensor-based ADAS systems, Genesys said.
The HD maps include ADAS-critical features such as lane geometry, road markings, barriers, signage, medians, elevation and curvature profiles, and localization objects like poles and gantries — all processed to achieve centimeter-grade precision.
CORS network plays a key role
To achieve the centimeter-level accuracy required for ADAS Level 2 functionality, Genesys relies on the Survey of India’s Continuously Operating Reference Stations (CORS) network. Real-time GNSS correction signals along major corridors dramatically strengthen field operations, allowing survey teams to capture lane-level and asset-level detail that meets global automotive standards.
This work builds on the existing memorandum of understanding between Genesys and Survey of India, enabling collaboration on digital twin projects, national mapping programs, and high-accuracy geospatial missions.
These datasets are owned by Genesys and can be licensed across industries, creating opportunities in commercial fleet navigation, logistics optimization, mobility platforms, safety analytics and automotive R&D.
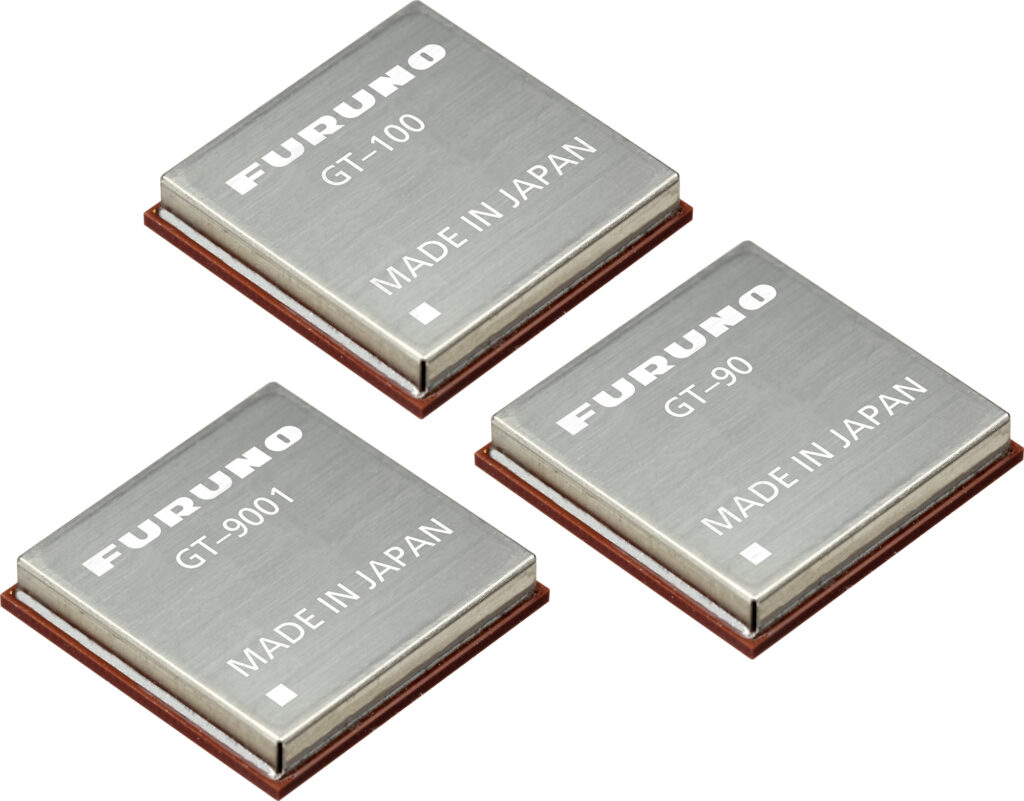
Furuno will begin providing new firmware for its GNSS receivers for time synchronization, including models GT-100, GT-90 and GT-9001, which adds authentication features (OSNMA/QZNMA) and significantly strengthens anti-jamming and anti-spoofing measures.
In fields that support critical infrastructure such as telecommunications, finance and power, GNSS vulnerabilities have become a major issue. The Furuno team participated in Jammertest 2025, the world’s largest GNSS resilience testing event. Jammertest 2025 took place in Norway, and verified robustness and reliability under real attack conditions to meet the requirements of critical infrastructure.
Features of the new firmware
The GT-100, GT-9001 and GT-90 modules. (Photo: Furuno)
Addition of authentication functions (OSNMA/QZNMA): Authentication messages from Galileo (European GNSS) and QZSS (Japan’s Quasi-Zenith Satellite System) confirm the authenticity of navigation messages, strengthening resistance to spoofing attacks.
Enhanced anti-jamming and anti-spoofing measures: Detect and eliminate various interference signals with high precision, ensuring stable time synchronization.
Removal of altitude restrictions, enabling use in the stratosphere and similar environments
Addition of TAI (International Atomic Time) output function
Support for multiple data formats (RTCM10403.3, RINEX4.1, binary)
Availability For existing users: Provided as a firmware update.
For new shipments: GT-100, GT-90 and GT-9001 with the new firmware are scheduled to ship beginning in March 2026.
Related product information Furuno has also launched the GNSS Surge Protector, TVA-05V for GNSS antennas. This product protects GNSS receivers from surges caused by lightning, further enhancing the stable operation of critical infrastructure.
In Jammertest 2024, challenges were identified using GT-100; in Jammertest 2025, improvements were validated with the upgraded version, confirming the effectiveness of the resilience algorithms under operational conditions.
Tersus GNSS has launched the MVP S1 RTK-SLAM handheld 3D laser scanner for mobile mapping and reality capture. The MVP S1 uses GNSS through an AI-driven RTK-SLAM workflow, as well as lidar data with imagery from dual 48-megapixel panoramic cameras.
The combination provides survey-grade results in both GNSS-denied and open environments. The system achieves centimeter-level accuracy outdoors and maintains performance indoors or underground through SLAM processing.
TimeSync 3.0 synchronizes the hardware, aligning sensor data at the microsecond level and supporting consistent datasets and reliable post-processing.
A mobile application provides users with real-time feedback, including previews of colorized point clouds while scanning, as well as basic scan reports on site. This feature helps operators verify data completeness and quality before leaving the field, reducing the need for repeat visits.
The MVP S1 supports 3D gaussian splatting (3DGS), enabling creation of textured, photorealistic 3D models. This capability is useful for building information modeling, construction progress monitoring, underground surveys, forestry analysis and industrial site documentation.
It’s always good news when we hear about NASA’s “out-of-this-world” next steps toward building a replacement for Ingenuity, the small Mars helicopter-drone. With 72 flights over 1,004 days, Ingenuity outlived NASA’s expectation of just 30 operational days on Mars. It ended up serving as a trailblazer for the SUV-sized Perseverance rover as it worked its way around Jezero Crater. Built with a large number of smartphone components, it’s actually amazing that this thing survived for so long, given the radiation environment on the surface of Mars, along with the harsh temperature extremes of daytime 32°F to nighttime minus 130°F. How a Samsung S5 phone battery survived, operating so far outside its design temperature range, is hard to fathom.
NASA’s 20-year plan for future Mars exploration now looks to take advantage of the huge expansion of the envelope for exploration that the small 30-day Mars helicopter brought to the Perseverance mission: “Enhanced mobility systems will enable exploration of challenging terrains and increased operational range. Aerial mobility technologies will facilitate access to previously unreachable areas on Mars.”
NASA drone flies over Mars Hill in Death Valley during recent navigation tests. (Photo: NASA/JPL)
So now NASA is working on the next Mars rover mission and on improvements for its accompanying airborne support. A team recently took three commercial drones into Death Valley to work on overcoming navigation problems that Ingenuity encountered on Mars flying over “bland” terrain with few visual features for its optical navigation system. Sand dunes without features on Mars messed with Ingenuity’s navigation solution, including on its 72nd flight.
Death Valley and Mesquite Flats Sand Dunes were two places the NASA team visited to test improved navigation algorithms installed on existing commercial drones, and they found some improvements by adding camera filters. The new software helped find landing spots in cluttered terrain.
But now new initiatives are seeking ways to get crewed flights to Mars in the next couple of years, well ahead of NASA’s timetable, which doesn’t move to anything crewed until around 2030. NASA still seems to prefer to pursue landers to gather much more data on Mars before risking crewed flights. Robotic dogs are also being investigated that can traverse rugged uphill areas that landers cannot access, as well as a winged glider the size of a small school bus.
Meanwhile, the never-ending Russia-Ukraine war rages on, dominated by drone attacks from both sides. Russia is increasingly using Iranian Shahed or the equivalent Russian-produced Geran-2 one-way drones, while Ukraine intercepts them with low-end modified commercial drones. This stalemate has $20,000 Geran-2 drones being brought down by high-speed interceptor drones built for $2,000 to $6,000 — in other words, the cost of attrition might determine the victor.
Russian Geran-3 jet-powered drone downed by Ukraine. (Photo: DIU)
However, Russia has now introduced a jet-powered Geran-3 model that flies at up to 230 mph, which Ukraine has apparently been able to bring down.
As we well know, Ukraine not only regularly receives Western military equipment but also civilian drones in large numbers. But an industrial capability has also been created in Ukraine to design, develop and build high volumes of drones. So it’s not surprising that Ukraine has revealed its own interceptor drone known as Sting.
STING interceptor drone and imagery striking a Shahed drone. (Photo: Wild Hornets Group)
Nevertheless, Sting has four rotor props and should be no match for a Geran-3 flying at top speed, even though Sting is claimed to be capable of 215 mph. The Russian jet-powered drone also apparently comes with anti-jam capabilities and a satellite navigation system, but Russia has yet to field these new drones in large numbers. Of course, Ukraine says it has already developed jet-powered interceptor drones — so the step up to the next level of technology should happen for both sides, but of course, costs increase for both sides, which neither can really afford.
Defense has always affected the speed of development for any technology — government funding and oversight are major incentives for new companies to emerge and for new technologies to be developed. Anduril Industries has recently emerged as a new entrant to the U.S. industrial defense complex, specializing in autonomous systems. Anduril’s products include unmanned aircraft systems and counter-UAS, and they have made big strides in both areas.
Anduril is a relatively new company, initially founded in 2017, so its products are fresh off the drawing board and its product improvement experience is at best eight years. The big U.S. defense contractors have fielded and corrected decades of problems in their high-tech systems, so new generations come with hard-learned design and build understanding. The advantage for Anduril is that they are not bound by the restrictions of a long-established industrial heritage, but this can also mean they may still have a way to go in learned experience.
Nevertheless, in high technology, much is new technology and new software and new approaches to build. So it takes effort to not only make this stuff work but also to make it work reliably.
Anduril builds lots of test articles and rapidly evolves the design through rigorous internal and real-world testing. So it’s not uncommon to see test failures — this is how improvements are developed.
Recent U.S. defense tests that saw crashes at Eglin Air Force Base in Florida drew a lot of bad press, given that the Altius drone had already been battle-tested in Ukraine. However, if the approach of lower cost, high volume and attritable drones is the one we have chosen, it may take a little more time to get maturity into the beast.
Navigation testing for NASA’s next Mars drone, jet-powered attack drones, and evolving interceptor defenses and drones from a new player on the U.S. defense scene — a pretty wide range of unmanned aircraft applications.