NM Group is nearing completion on an aerial mapping project covering more than 16,000 kilometers of United Kingdom rail network.
In 2014, NM Group was engaged to map the rail assets with a mix of high-tech laser measurement and imaging equipment, as part of a project to improve asset maintenance, operational effectiveness, efficiency and safety.
The project used a mix of specially commissioned lidar and high-resolution multi-angle cameras mounted on helicopters, carrying out aerial operations and ground-control activities over a four-month period and completing it before winter. The survey information was rapidly transported to NM Group’s Technology Centre in Knaresborough, North Yorkshire, where a team of specialists have been converting nearly a petabyte of raw data into a wide range of terrain, asset and imaging outputs.
“I am incredibly proud of the way our team has responded to this large and challenging project, completing the data capture within an unprecedented timescale and producing a high-quality output that will serve the rail network for years to come,” said NM Group’s CEO Kevin Jacobs.
NM Group’s contribution to the program provides the geospatial fabric on which other layers are overlaid, the basis for asset location mapping and the start point for the design of upgrades and modifications. Traditionally, this information would have been created by a visit to the site by a team of surveyors.
The new method will significantly reduce the need for future field work and trackside access. It will also facilitate more efficient maintenance, allowing crews to identify and access assets more safely and efficiently than in the past, via apps on a range of mobile devices, NM Group said.
NM Group is a specialist service provider of asset management, surveying and mapping solutions to sectors including energy transmission and distribution and road and rail transport. Applying a range of remote sensing and geospatial technologies, the company offers a full range of services from data acquisition through to analytics and web applications for wider access to information.
Topcon Positioning Group announces a new partnership with digital photogrammetric solution provider Agisoft LLC. The agreement is designed to further expand the Topcon solutions portfolio for mass data collection (MDC).
Agisoft is a world leader in the processing of digital imagery in order to generate high-accuracy 3D spatial data using photogrammetric and computer vision techniques, and has been developing imaging solutions for nearly 10 years. Topcon will provide the Agisoft Photogrammetric Kit for Topcon — Professional Edition software for post-processing of data collected using the Falcon 8 and Sirius Pro unmanned aerial systems (UAS).
Features include photogrammetric triangulation, dense point-cloud editing and classification, digital terrain or surface model export to a variety of formats including georeferenced orthomosiac production (including GeoTIFF and KML export), multi-spectral imagery processing, 3D model generation and texturing, as well as full measurement analysis tools.
“We are very excited to be able to offer the combination of our Sirius Pro and Falcon 8 UAS devices and Agisoft Photogrammetric Kit Professional software. The solution provides an integrated workflow for reaching high-accuracy survey results using unmanned aerial systems with minimal field work,” said Eduardo Falcon, executive vice president and general manager for the Topcon GeoPositioning Solutions Group. “For example, when using the Sirius Pro, absolute accuracies down to 1.6 cm (0.6 in.) in plan and 2.7 cm (1 in.) in height are possible without the need for any ground control.”
Fugro has been awarded a three-year contract by PGS for the provision of precise satellite positioning systems for its seismic vessel fleet. PGS is a leading global provider of marine seismic and electromagnetic services, data acquisition, imaging, reservoir services and multi-client library data.
Fugro, provider of precise satellite positioning to the offshore oil and gas industry, will supply PGS vessels with a number of independent GNSS. These systems include Fugro’s recently launched Starfix.G4 — a commercial GNSS service to utilize all available GNSS systems (GPS, GLONASS, Galileo and BeiDou), giving sub-decimeter accuracy — and Starfix.G2+, a global service offering centimeter accuracy in both position and height.
In addition to precise vessel positioning, PGS will benefit from a new generation of positioning technology for their seismic sources and tailbuoys. Meeting the high demand for robustness and quality in the offshore industry, this proactive technology provides independent decimeter and centimeter positions and heights for remote (seismic source and tailbuoy) operations.
Cerys James, vice president technical at PGS, remarked, ”Reliable, precise positioning technology is essential for modern seismic operations. The solution supplied by Fugro will ensure our entire fleet has highly accurate vessel positioning, along with precise source and streamer positioning.”
Jane Goodall and the Jane Goodall Institute have launched the Tapestry of Hope, an interactive online tool to visualize the thousands of projects led by young people around the globe who are protecting the environment.
As world leaders struggle to make progress in Paris for the 21st Conference of the Parties to the United Nations Framework Convention on Climate Change, Goodall, spreading her message of hope for our world, is calling on each of us to take action ourselves to protect our natural world.
Founder of the Jane Goodall Institute and UN Messenger of Peace, Goodall, through her Roots & Shoots program, has inspired hundreds of thousands of people around the globe to take action to make the world a better place for people, animals and the environment. Together, these individual actions weave together a story of impact — a narrative of change for what Goodall has come to call the Tapestry of Hope.
The launch of Tapestry of Hope reflects a snapshot of the projects young leaders have led in the past several years through Roots & Shoots,” said Erin Viera, associate vice president of Roots & Shoots. “Moving forward, the map will be a critical tool to document, manage, visualize and share the actions and impacts of Roots & Shoots projects that are making a positive difference for the environment, animals and people. The map will continue to grow and populate with the launch of each new Roots & Shoots community project that young people continue to pioneer around the world.”
“Esri and the Jane Goodall Institute have collaborated on conservation programs across Africa for more than 10 years now. These projects have included applications ranging from using geospatial technologies for chimpanzee behavior research in Gombe to supporting the development and implementation of conservation action plans and improving village land use using geodesign and community mapping across East Africa and Congo basin,” said Lilian Pintea, the Jane Goodall Institute’s vicepresident of conservation science.
Esri technology that powers the mapping behind JGI’s conservation work forms the basis of the Tapestry of Hope. The map connects the work of young people around the world with other young people who are passionately making the world we all share a better place through local projects.
In addition to documenting and visualizing the work of young people around the world, the Tapestry of Hope map serves to further Goodall’s message of hope. It brings together the critical observations, creative ideas and clever solutions of thousands of passionate young minds all working to make a difference in the world. It is designed to represent and inspire a global movement of change showing that young people care about the future of the world they are inheriting, and are taking action.
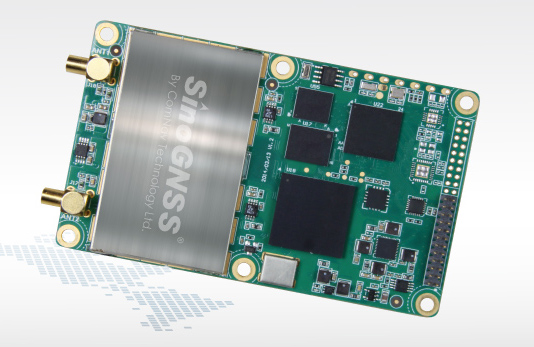
Positioning and heading for mission-critical applications
The K528G dual-frequency, multi-constellation GNSS board provides the highest accuracy in differential positioning. It benefits from numerous constellation signals because of its advanced tracking performance of both GPS and GLONASS. The K528G can provide positioning and heading information generated by two antennas. It is designed for guiding and positioning construction engines, dredges, barges, shipping container cranes, mining equipment and intelligent transportation systems.
Designed for small-cell and distributed antenna systems
GPS Source has released of a line of GPS/GNSS splitters created for the small-cell wireless and distributed antenna system markets. Specifically designed for the L-band frequency, they can eliminate the cost of multiple antennas and long cable runs in wireless installations. With four or eight outputs, the new line of splitters make it possible to use a single GPS referencing antenna and cable arrangement for multiple synchronized systems. The splitters include features such as DC bias select and amplification. GPS Source RF signal splitters typically operate in conjunction with an active GPS antenna; consequently, a GPS RF signal splitter must have provisions for managing the DC voltage to the active GPS antenna. The S14GT and S18GT splitters will power an external GPS antenna from any of the RF outputs. A “hunt-and-pick” circuit is used to select only one DC input for power should more than one source be connected. Designed for redundancy, if the selected DC bias input should fail, the DC bias will automatically switch to another DC input to ensure an uninterrupted power supply to the active antenna.
For precision industrial, agricultural and military OEM applications
A new series of L1 band wideband antennas for OEM applications is offered in three formats:
▪ TW2106/TW2108 — GPS L1
▪ TW2406/TW2408 — GPS + GLONASS
▪ TW2706/TW2708 — Galileo, BeiDou, GPS + GLONASS
Each antenna type features Tallysman’s Accutenna technology, which provides high rejection of multipath signals, with low axial ratios and tight phase center variations (PCV). Each is available with a brickwall pre-filter option to protect against saturation by high level subharmonic and L-band signals. The antenna printed circuit boards (PCBs) are 56 millimeters in diameter with four plated holes for secure mounting. They are available with a variety of connectors and custom cable lengths, and can be custom-tuned. All of them are REACH and ROHS compliant.
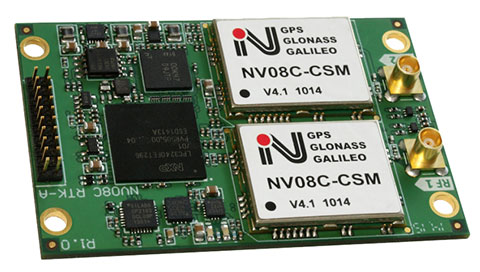
The NV08C-RTK-A is fully integrated multi-constellation L1 heading receiver with embedded real-tiime kinematic (RTK) functionality and compatibility with GPS, GLONASS, Galileo and BeiDou. The NV08C-RTK-A is designed for use in high-accuracy applications that demand low-cost, low-power consumption, a small form factor and high performance, such as construction, mining and industrial; environmental and structural monitoring; machine control; parallel driving systems; precision agriculture; UAVs; and robotics and intelligent machines.
The SLD-100 GNSS Rover accessory facilitates hydrographic measurement in bodies of water up to 100 meters in depth. it is designed for anyone who finds themselves needing to survey into bodies of water, streams and rivers. With survey-grade accuracy, the SLD-100 can be added to any brand GNSS RTK rover to allow for position and depth measurements to be made simultaneously. With a built-in 10-hour lithium battery and transmitter unit with Bluetooth connectivity, the SLD-100 provides standard-depth data streams in several industry-standard NMEA formats at 1 Hz, 4800 bps, providing compatibility with any hydrographic surveying software package. Position and depth information is externally logged on a computer or controller. Included transom mounting hardware enables easy installation.
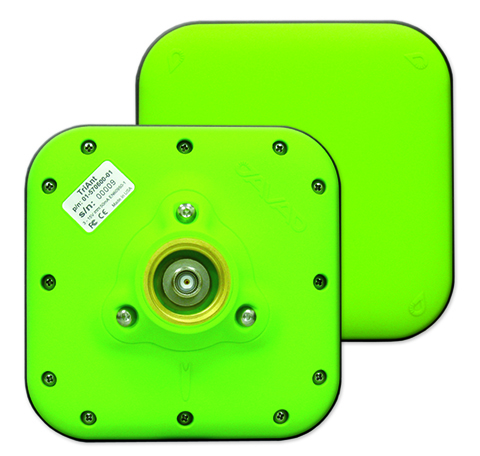
TriAnt is small, thin and rugged high-performance GNSS antenna. It measures 128 x 128 millimeters (mm) square and 39 mm thick. It can be mounted with three screws to flat surfaces. It is designed for applications such as machine control and surround anennas of the TRIUMPH-4X. The antenna cable is routed through the center of the antenna (TNC connector) for protection in harsh environments. The TriAnt can also be mounted on poles (1–14 inches thread) using its mount-pole attachment, which increases the thickness to 54.5 mm.
The X20i L1 GPS receiver by CHC Navigation is powered by a high-precision L1 GPS engine. Its integrated Bluetooth chip enables it to wirelessly collect submeter positions in real- time or centimeter post-processed on an iPhone or iPad. All location-aware apps on the iPhone and iPad are compatible with the X20i. Immediately after pairing and answering the security question allowing the X20i to take control of location services on the iOS device, 1 million iOS applications are capable of utilizing the high-accuracy data of the X20i, and become accurate to either 1 foot or 1 centimeter. Apps that can make use of the high accuracy include TerraGo Edge, ESRI’s ArcView Connector and those by CarteGraph Systems.
BlueStarGPS offers both GPS and GNSS options in a rugged, lightweight package. The BlueStarGPS device was designed to meet sub-meter mapping and data-collection needs in the pipeline and utility industries. It provides sub-meter precision without post-processing, and maintains accurate positioning when the SBAS signal is obstructed. This means it can function under trees, around buildings and in rugged terrain where other receivers can fail. The BlueStarGPS is designed specifically for use with Android mobile devices, such as smartphones, tablets or notebook computers, as well as cable and pipe “locating” tools with a connectivity range of up to 1 kilometer.
UAV measures through water surfaces of rivers, lakes
The RIEGL BathyCopter is a small-UAV-based surveying system capable of measuring through the water surface. It’s suitable for generating profiles of rivers or water reservoirs. The platform design integrates a topo-bathymetric green laser depth meter, an APX 15 inertial measurement unit (IMU)/GNSS with antenna, a control unit and a digital camera. Applications include generation of river profiles, survey of reservoirs and canals, landscaping, support of construction projects, and surveys for planning and carrying out hydraulic engineering work.
The Zenmuse X5 is a micro four-thirds (M4/3) camera designed specifically for aerial use. With a large sensor, aerial image makers will be able to capture up to 13 stops of dynamic range, enabling capture of high-resolution 16-megapixel photos or 4 k, 24 fps and 30 fps videos in complex lighting environments. It supports four interchangeable lenses. The Zenmuse X5 is designed for creation of high-quality aerial maps and 3D models, industrial and utility inspection, and professional video capture.
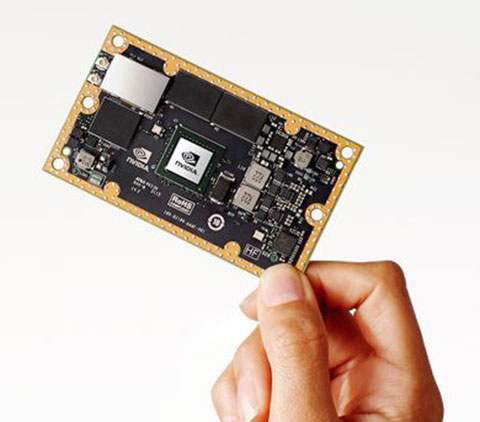
The NVIDIA Jetson TX1 module is designed to power smart devices — including drones that don’t just fly by remote control, but navigate their way through a forest for search and rescue. It is an embedded computer designed to learn to recognize objects or interpret information, incorporating capabilities such as machine learning, computer vision and navigation into a single system. This technology expands the ability of machines to operate on their own and adapt to their surroundings by recognizing images, processing conversational speech, or analyzing a room full of furniture and finding a path to navigate across it.
Aruba, a Hewlett Packard Enterprise company, has introduced a cloud-based beacon management solution designed for multivendor Wi-Fi networks and beacon analytics. Aruba also expanded its app developer partner program for the Meridian Mobile App Platform to accelerate innovation of location-based mobile apps.
Since its launch in November 2014, Aruba Mobile Engagement, powered by Aruba Beacons and the Meridian Mobile App platform, has improved customer satisfaction in such diverse organizations as Levi’s Stadium and Orlando International Airport, Aruba said in the news release. Aruba Mobile Engagement directly interacts with customers through their mobile devices based on the customers’ in-venue location and personalized preferences.
The new Aruba Sensor is designed to dramatically reduce IT overhead and make it easy to manage all beacons from a single location. Aruba estimates approximately 48 hours of time savings in a 1,000-beacon deployment during a single maintenance window.
The new enterprise-grade Internet of Things Aruba Sensor combines a small, Wi-Fi client and Bluetooth low energy radio to remotely manage beacons across existing multi-vendor Wi-Fi networks from a central location. For IT departments, this means easier and significantly more cost-efficient management and monitoring of beacon data including battery life, power settings and software updates, Aruba said.
Orlando International Airport (MCO), which hosts nearly 38 million travelers annually, implemented Aruba’s Mobile Engagement solution in late 2014 and has since seen more than 26,000 downloads of its MCO mobile app.
“Since so many travelers now rely on mobile apps, the accuracy and reliability of the information we’re delivering is paramount,” said John Newsome, director of information technology for the Greater Orlando Airport Authority. ” Today, to ensure this accuracy, our IT staff must monitor the beacons manually which is burdensome for such an extensive deployment. Using the new Aruba Sensors, however, we’ll be able to manage our beacons remotely, saving valuable time and IT resources.”
Unmanned aerial vehicle maker DJI has launched of a smart, crop-spraying agricultural drone. The DJI Agras MG-1 is dustproof, water-resistant and made of anti-corrosive materials. It can be rinsed clean and folded up for easy transport and storage after use.
The eight-rotor Agras can load more than 10 kilograms of liquid for crop-spraying and can cover between seven and 10 acres per hour. It is more than 40 times more-efficient than manual spraying, according to DJI. The drone can fly up to eight meters per second and adjusts spraying intensity to flying speed to ensure even coverage.
The Agras features DJI’s flight-control system and microwave radar to ensure centimeter-level accuracy. During flight, the drone scans the terrain below in real time, automatically maintaining its height and distance from plants to ensure application of an optimal amount of liquid. DJI’s real-time Lightbridge 2 transmission system is also onboard.
The DJI Agras MG-1.
Users can select automatic, semi-automatic or manual operation modes, depending on terrain, with uniform spraying carried out via the drone’s nozzles. The drone has four replaceable, ceramic nozzles, each powered by a motor. The included nozzles can be used for thousands of hours of spraying. Downward airflow generated by the rotors increases spraying velocity and ensures the agent will reach plant stems and leaves near the soil.
The Agras MG-1’s body is sealed, and features an integrated centrifugal cooling system designed to extend motor life by up to three times. Triple-filtration cuts off intake of mist, dust and large particulates to reduce wear from impurities. As the drone flies, air enters the aircraft body via the front inlet. It is then filtered and passes through each of the aircraft’s arms to the motors, capturing heat from all components and the entire structure. Heat is then dissipated by venting into the surrounding air.
The DJI Agras MG-1 is designed for crop spraying.
The drone’s intelligent memory function means after the Agras MG-1 is brought back to base for refill or recharge, it will return to its last memory point to pick up spraying where it left off.
Users control the Agras with a custom DJI remote. Its low-energy display panel gives real-time flight information and lasts for extended periods on a single charge.
The Agras MG-1 will initially be available in China and Korea and later in other markets.
Tallysman has introduced the TW2920 antenna for simultaneous reception of L-band correction signals and all of the upper band GNSS signals, including GPS L1, GLONASS G1, Galileo E1 and BeiDou B1.
The TW2920’s 1-dB bandwidth covers 1525-1559 MHz for the L-band downlink and 1559-1610MHz for the upper-band GNSS.
The LNA of the TW2920 provides 28dB of gain; the TW2940 is a higher gain version with 35-dB LNA gain. The TW2926 antenna is an unhoused OEM version of the TW2920 with 28-dB of gain.
The antennas employ Tallysman’s Accutenna technology, which provides strong cross-polarization rejection for greatly improved multipath rejection, low axial ratio and tight Phase Center Variation (PCV).
All of the antennas include a sharp pre-filter to protect against sub-harmonic signals such 700MHz LTE and strong near frequency signals such as Wi-Fi.
The Tallysman TW2920.
The Tallysman TW2940.
The Tallysman TW2926.
The TW2920 and TW2940 have metal bases with wide temperature range plastic radomes, 57mm in diameter and 15mm in height, with a magnetic mount or adhesive mount along with four tapped screw holes. They are IP67 compliant and available with either a watertight SMA connector on the bulkhead or with a RG174 cable with your choice of connector.
The TW2926 OEM version of the antenna is 56 mm in diameter and has four drilled plated holes for secure mounting within customers’ products. This antenna can be custom tuned to ensure optimal performance within an enclosure.
Sanborn collected this high-resolution mobile lidar image of a corridor in Glacier National Park. (PRNewsFoto/The Sanborn Map Company, Inc.)
The Sanborn Map Company Inc. has completed mobile lidar data collection for two corridors in Glacier National Park and one corridor in Yellowstone National Park totaling 40 linear miles.
Sanborn was selected for the project to provide data that could be used to determine the level of effort and cost to resurface the roads, which are in dire need of repair. In Yellowstone alone, about 185 miles of main roads are in a structurally deficient state, with poor quality road bases failing under the weight, speed and volume of modern traffic, for which they were not designed. Harsh winter weather and short construction seasons in both parks provide additional challenges.
During the 2015 fall season, Sanborn acquired the lidar point clouds, which were particularly dense with 300-500 points per square meter, along with accompanying georeferenced imagery. The firm’s post-acquisition approach involved auto-filtering the point clouds in the ground and non-ground classes. The points in the ground class were used to derive road centerlines and edges of pavement, and the non-ground points were used to derive guardrails in vector format.
“This project was particularly rewarding because both of these parks truly are national treasures,” notes Arjan Mooij, Sanborn program manager. “There’s no doubt that the quality data we provided will help streamline the process for their much-needed road repairs.”
Sanborn’s mobile mapping system combines lidar with high-resolution video, delivering better than 5-centimeter accuracy and image resolution as fine as 1 centimeter with efficient data capture at vehicle speeds of up to 60 mph.
Part 1 of this series appeared in the June Survey Scene newsletter, Part 2 appeared in the August newsletter, and Part 3 appeared in the October newsletter. Upcoming Survey Scene newsletters will carry additional columns in this series.
Basic Procedures and Tools for Ensuring GNNS-Derived Ellipsoid Heights Meet the Project’s Desired Accuracy
David B. Zilkoski
In Part 1 of this series, I discussed the basic concepts of GNSS-derived heights; the article discussed the three types of heights involved in determining GNSS-derived orthometric heights: ellipsoid, geoid, and orthometric.
Part 2 discussed guidelines for detecting, reducing, and/or eliminating error sources in ellipsoid heights. It focused on guidelines for establishing accurate ellipsoid heights in a local geodetic network. It discussed procedures that need to be followed to detect, reduce, and/or eliminate error sources to estimate accurate GNSS-derived ellipsoid heights, and procedures for evaluating published NAD 83 (2011) ellipsoid heights.
Part 3 in this series described the differences between a scientific gravimetric geoid model and a hybrid geoid model, and why it is important to use both geoid models in your analysis. It highlighted that the latest published United States National Geodetic Survey (NGS) hybrid geoid model, Geoid12B, is made consistent with the United States national vertical height reference frame, that is the North American Vertical Datum of 1988 (NAVD 88). It emphasized that this means a user will be consistent with NAVD 88 when using GEOID12B to estimate GNSS-derived orthometric heights, but it doesn’t guarantee that your GNSS-derived orthometric heights are accurate. It demonstrated how to use these geoid models and ellipsoid heights to identify potential issues with published NAVD 88 heights.
This column (the fourth in this series) will focus on basic procedures and tools that should be used to establish accurate GNSS-derived ellipsoid heights for a project. It will provide basic procedures for ensuring a project’s GNSS-derived ellipsoid heights are meeting the desired accuracy. The accuracy of the adjusted ellipsoid heights must be evaluated first, so if there is an issue with the difference between the GNSS-derived orthometric height and published NAVD 88 height, the user will know if the ellipsoid height or the orthometric height is the problem.
NGS has developed guidelines that address the establishment and densification of vertical control networks through the use of GNSS surveys and valid NAVD 88 orthometric control. NGS has documented these procedures in NOAA Technical Memorandum NOS NGS-59, titled “Guidelines for Establishing GNSS-derived Orthometric Heights (Standards: 2 cm and 5 cm). The document provides basic rules and procedures that need to be adhered to for computing accurate NAVD 88 GNSS-derived orthometric heights. However, before we can validate NAVD 88 height constraints used to estimate GNSS-derived orthometric heights, we first need to ensure that the GNSS-derived ellipsoid heights are accurate to the desired requirements. It is impossible to describe all situations in a short newsletter, so this column will address the basic procedures with a few caveats.
Validating Your GNSS Survey Project’s Ellipsoid Heights
Part 2 discussed guidelines for detecting, reducing and eliminating error sources in ellipsoid heights (NGS 58). It focused on evaluating published NAD 83 (2011) ellipsoid heights. This column will discuss a few basic procedures for analyzing a GNSS project’s data to ensure the desired ellipsoid height accuracy standard has been met.
GNSS data can be evaluated by analyzing repeat baseline differences, network loop closures and residuals from a minimum-constraint least-squares adjustment. It was noted in the second article that if GNSS users follow the NGS guidelines, they will reduce and/or eliminate errors in ellipsoid heights and, at a minimum, they will detect problems or errors in data. It was also mentioned that the basic concepts are very simple, but they all need to be followed exactly as prescribed. For example, “the observing scheme for all stations requires that all adjacent stations (baselines) be observed at least twice on two different days and at two different times of the day.”
GNSS can provide “absolute” and relative positioning information much easier, faster and more precisely than some classical techniques. However, the wrong station can still be occupied, the height of the antenna can be measured wrong or incorrectly entered during the baseline reduction processing phase, the receiver can malfunction, an abnormal atmospheric condition can cause large errors in the height component, or some “unknown Gremlin” can be causing an error source.
Classical techniques of establishing horizontal and vertical control used networks that consisted of many loops, triangles and braced quadrilaterals. This design provided enough redundant observations to detect data outliers. NGS guidelines for establishing GNSS-derived heights were designed with this same concept in mind. Since all baselines must be repeated and adjacent station observed, analyzing repeat baseline differences, loop closures and residuals from minimum-constraint least-squares adjustments are very effective analysis tools for detecting data outliers.
Comparing Ellipsoid Height Differences from Repeat Baselines
This procedure is very simple: subtract one ellipsoid height difference from another, for instance, the ellipsoid height difference from baseline A to B on day 1 minus the ellipsoid height difference from baseline A to B on day 2. If this difference is greater than 2 cm, one of the baselines must be observed again. Comparing ellipsoid height differences from repeat baselines is a very simple procedure, but it’s also one of the most important. Many users complain about having to repeat baselines, but requiring an extra occupation session in the field can often save many days of analysis in the office. In addition, repeating the baseline provides the redundancy necessary to obtain the desired relative accuracy of the survey (that is, repeat measurements help to derive a more accurate result than a result derived from a single measurement).
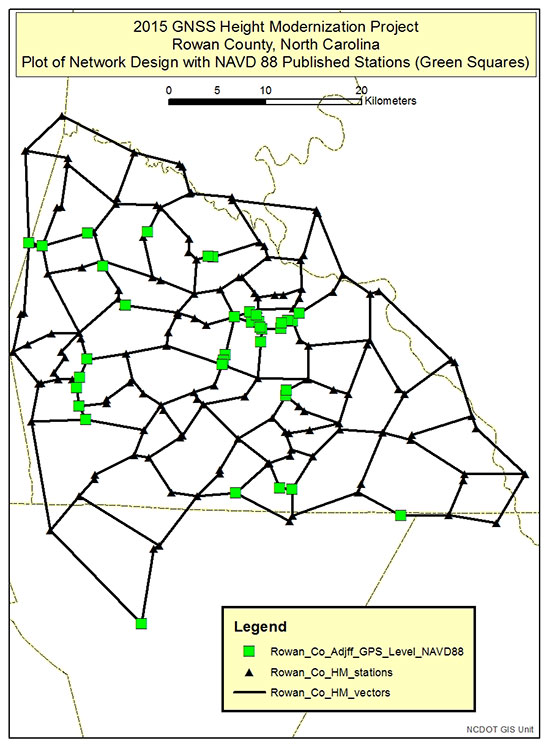
Figure 1 depicts the network design of a 2015 North Carolina Geodetic Survey (NCGS) GNSS Height Modernization Project. The data from this GNSS project was provided to me by the North Carolina Geodetic Survey (James G. Gay, chief of Western Field Operations, North Carolina Geodetic Survey, Division of Emergency Management/Risk Management, North Carolina Department of Public Safety, 2090 US 70 Highway, Swannanoa, NC 28778). It should be noted that these results should be considered preliminary and have not been finalized by NCGS personnel. This is an excellent example of a GNSS project that followed the guidelines outlined in NGS 58. The network design includes short baselines with many loops. The average length of baselines is 2.9 km, the maximum baseline is 13.5 km, and there are 465 baselines connected to 182 stations. All baselines were repeated, making the analysis easy.
Figure 1. Plot depicting the Network Design of the NCGS Rowan County Height Modernization GNSS Project.
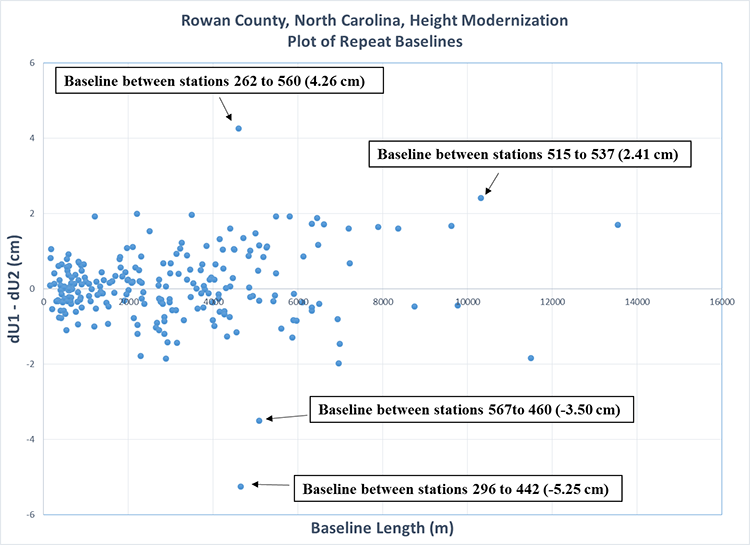
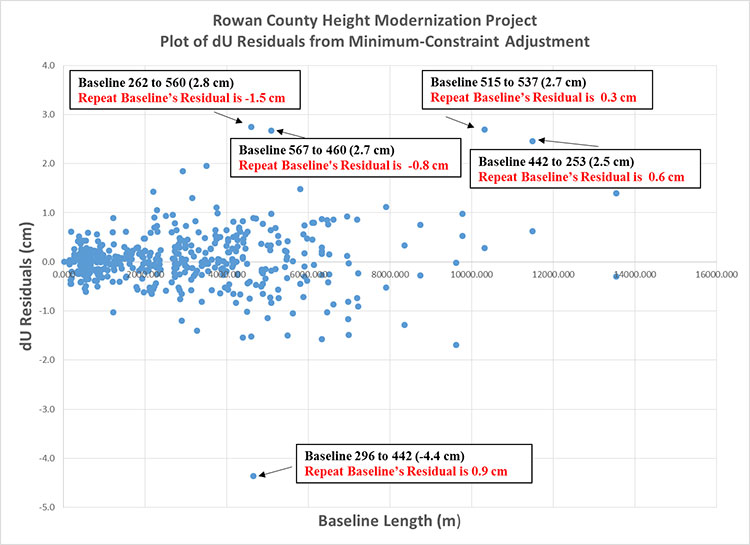
Figure 2 is a plot of the differences between repeat baselines. First, it should be noted that most baselines are less than 5 km and most repeat baselines differences are less than +/- 2 cm. There are some outliers, which is not unusual when performing GNSS surveys even when following all guidelines outlined in NGS 58. What is important is that these outliers are identified, and then additional observations are performed to meet the guidelines and obtain the desired accuracy of the survey.
The repeat baseline procedure helps to identify these outliers such as the baselines highlighted in figure 2. As noted in figure 2, the largest outliers are on two different baselines. These baselines should be re-observed to meet the NGS 58 guidelines. The requirement is to repeat the baseline on different days and at different time of the day. The reason for the requirement is to get two observations under different conditions and different satellite geometry. The user needs to determine which baseline is the outlier so he can ensure that he has two baselines with different satellite geometry. When a network is properly designed with short baselines and many loops, the results from a minimum-constraint least-squares adjustment can help identify the outlier.
Figure 2. Plot of repeat baselines for the NCGS Rowan County Height Modernization GNSS Project (does not include re-observations of repeat baselines that did not meet the 2 cm guideline).
Analyzing Loop Closures
Loop closures can be used to detect “bad” observations. If two loops with a common baseline have large closures, this may be an indication that the common baseline is an outlier. The following statement appeared in Part 2: “Please be aware that repeatability and loop closures do not always disclose all problems, and that is why it is important to adhere to the procedures outlined in NGS’ publications.” So why is it okay to use loop closures now?
Since users must repeat baselines on different days and at different times of the day, there are several different loops that can be generated from the individual baselines. If a repeat baseline difference is greater than 2 cm, then comparing the loop closures involved with the baseline may help determine which baseline is the outlier. As previously stated, according to NGS 58 guidelines, if a repeat baseline difference exceeds 2 cm, one of the baselines must be observed again, and baselines must be observed at least twice on two different days and at two different times of the day. If it can be determined which baseline is the potential outlier, the user will know which time of the day to re-observe the baseline. Therefore, loop closures can be very helpful in isolating errors when the user followed all of the guidelines outlined in the NGS 58 document.
Plotting Ellipsoid Height Residuals from Least Squares Adjustments
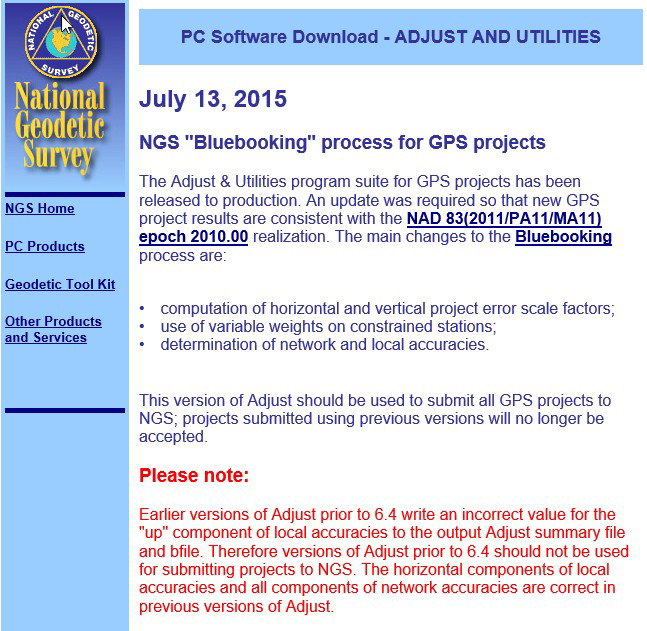
It is important that during the analysis of the GNSS-derived ellipsoid heights, the user performs a minimum-constraint least-squares adjustment and identifies potential outliers. This ensures that the GNSS-derived ellipsoid heights meet the user’s desired standards. This is not a complex procedure if the user knows how to perform a least-squares adjustment of GNSS data. Explaining least-squares adjustments is beyond the scope of this column. Today, most GNSS manufacturers provide support software that includes performing least-squares adjustments. NGS also provides software tools for validating data formats and performing adjustments. These tool can be found here. I used these tools to analyze and adjust the survey data of the Rowan County GNSS Height Modernization Project.
If users follow NGS guidelines and evaluate all repeat baselines, the adjustment results should confirm what has already been determined. For example, if a repeat baseline indicates a large difference between two vectors, then typically one of the residuals of one baseline should be larger than the other. Following NGS guidelines usually provides enough redundancy for the adjustment process to detect outliers and usually apply the residual to the appropriate observation, that is, the bad vector.
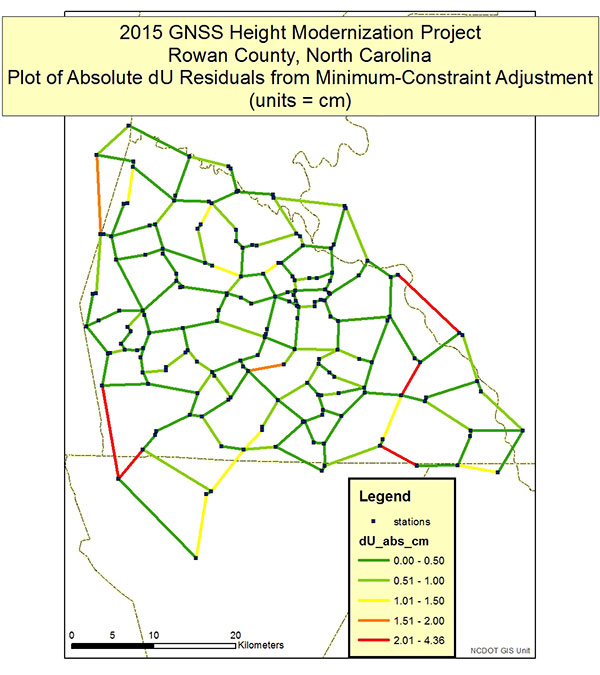
Like comparing repeat baselines, analyzing ellipsoid height residuals is also important. During this procedure, the user performs a 3D minimum-constraint least-squares adjustment of the GNSS survey project (constrain one latitude, one longitude and one ellipsoid height), plots the ellipsoid height residuals, and investigates all residuals greater than 2 cm.
Figures 3 and 4 depict the dU residuals from a least-squares adjustment of the Rowan County Height Modernization Project. NGS’ adjustment program provides the vector residuals in dX, dY and dZ; and dN, dE and dU (local geodetic horizon coordinate system). dU residuals are not the same as dh residuals, but for all practical purposes can be analyzed just like dh residuals. Looking at Figures 3 and 4, a few items should be noted. First, all dU residuals are less than 2 cm except for five baselines. Four of the five baselines had repeat baselines that exceeded the 2 cm repeat baseline requirement (see Figure 2). For example, the plot of repeat baseline differences indicated that baseline between station 296 and 442 disagreed by 5.25 cm (see Figure 2). The plot of dU residuals (Figure 4) from the least-squares adjustment shows that one of the baseline’s residual is -4.4 cm and the other is 0.9 cm. The adjustment results are indicating which baseline needs to be re-observed to meet the guideline’s requirement of repeat baselines on two different days at two different times of the day. That’s all there is to it, when the user follows NGS guidelines exactly as prescribed.
Figure 3. Plot depicting absolute dU residuals from the NCGS GNSS Height Modernization Project (does not include re-observations of repeat baselines that did not meet the 2 cm guideline).Figure 4. Plot of all residuals from the NCGS Rowan County GNSS Height Modernization Project (does not include re-observations of repeat baselines that did not meet the 2 cm guideline).
The reader may have noticed that one large residual on the residual plot, baseline 442 to 253 (11.5 km), did not show up as a large different on the repeat baseline plot. There are several reasons why this could occur. For example, the stations involved in the baseline are not adjacent stations, so the baseline wasn’t repeated; the repeat baseline closure was large, but not greater than 2 cm; or the pair of stations are involved with many vectors and the one vector is inconsistent with the other vectors. Regardless of the reason, if there’s enough redundant observations to and from a station and the repeat baselines don’t indicate a problem, then the adjustment is doing what it’s designed to do; that is, detecting outliers and reducing their influence on the final adjusted height. In this particular case, the repeat baseline closure between stations 442 and 253 was 1.84 cm, which meets the NGS 58 guideline of 2 cm. The adjustment uses all of the data to determine the best set of coordinates. Based on the repeat baselines and loops surrounding the two stations, the adjustment indicated that one of the vectors fits better with the other vectors surrounding the two stations. Per the requirement of NGS 58 guidelines, the NCGS re-observed all five baselines with large residuals.
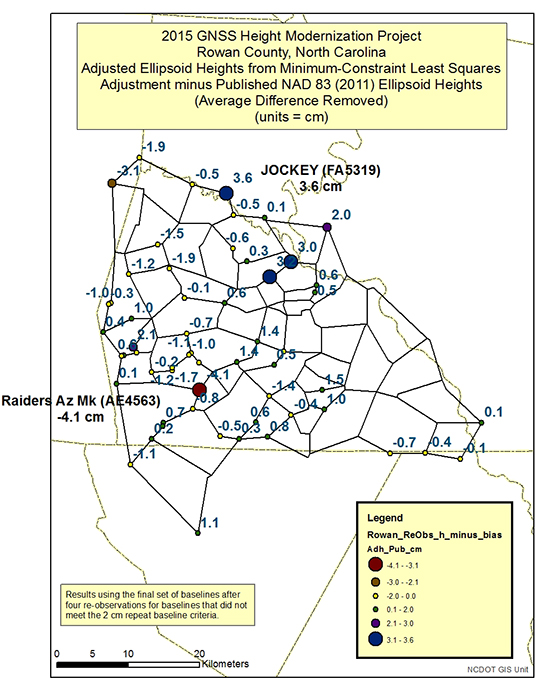
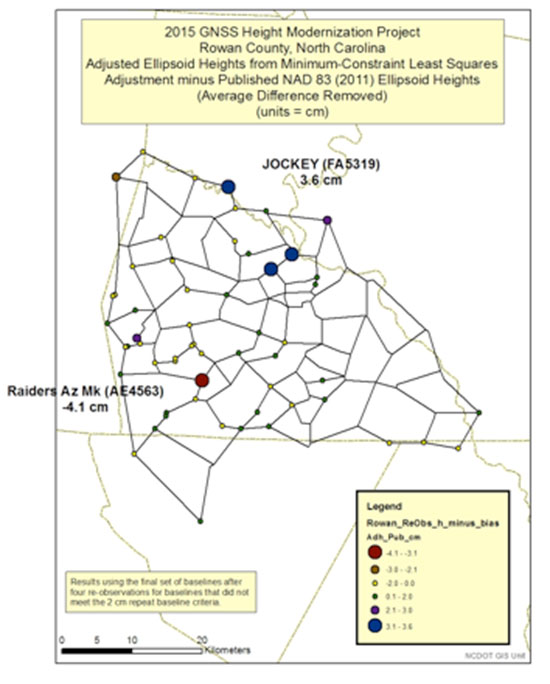
After all outliers are detected and removed from the adjustment, the user should compare the adjusted ellipsoid heights with the latest published ellipsoid heights, that is, NGS published NAD 83 (2011) ellipsoid heights. Figures 5 and 6 are plots of the adjusted ellipsoid heights from a minimum-constraint least-squares adjustment minus the NAD 83 (2011) ellipsoid heights. Since this was a minimum-constraint adjustment (that is, only one latitude, one longitude and one ellipsoid height value were constrained), a bias shift based on the average differences was removed from all differences. Most of the differences agree within +/- 2 cm. There are several that are greater than +/- 2 cm, but only one is greater than +/- 4 cm.
As mentioned in Part 2, many of the older GPS survey projects that were part of the NAD 83 (2011) network adjustment were not Height Modernization projects and were not performed following the NGS 58 guidelines. That is, most baselines are greater than 10 km and were not repeated. Therefore, in my opinion, many of the published ellipsoid heights local-height accuracies may be optimistic. The user should consider this when determining whether their results are more accurate than the published values. NGS’ Constrained Adjustment Guidelines for incorporating GNSS project data into NAD 83 (2011) state, “As a general rule, if the adjusted values of the constrained coordinates of a station shift by more than 2 cm horizontally and/or 4 cm in height, its horizontal coordinates and/or ellipsoid height, respectively, should be unconstrained.”
The stations that have height differences greater than 4 cm should be investigated. In addition, stations that have large relative height differences (greater than 4 cm) between closely spaced neighbors should also be investigated. For example, station Jockey’s difference is 3.6 cm, and two of its neighbors’ differences are only -0.5 cm. The relative difference exceeds 4 cm [3.6 cm – (-0.5 cm)] between two closely spaced stations.
Figure 5. Plot of adjusted ellipsoid height minus published NAD 83 (2011) Ellipsoid Heights (the number is the difference for that particular station; units = cm).Figure 6. Plot of adjusted ellipsoid height minus published NAD 83 (2011) published heights.
It is important to understand the quality of the adjusted ellipsoid heights. When analyzing the project’s ellipsoid heights, the user should compute the local ellipsoid height accuracy values. Part 2 discussed NAD 83 (2011) network and local accuracies. NGS’ adjustment program has an option of computing network and local accuracy values.
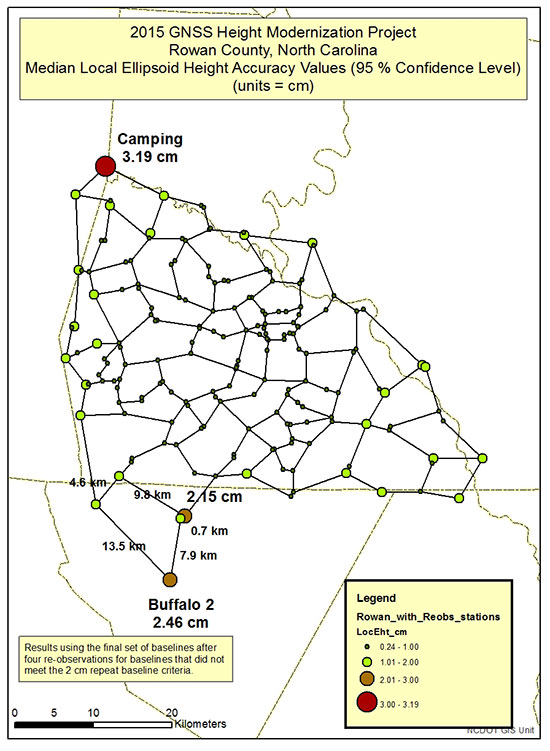
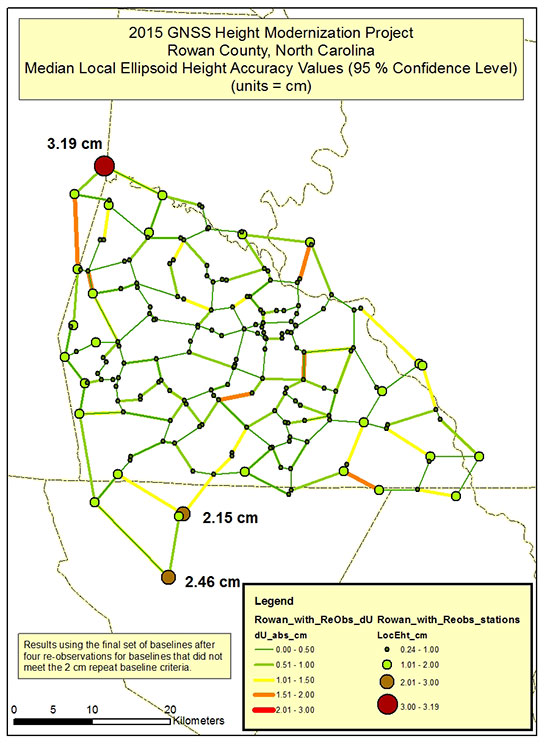
Figures 7 and 8 are plots of NCGS Rowan County GNSS Height Modernization median local ellipsoid height accuracy values. Stations that have local ellipsoid height accuracy values greater than 2 cm should be investigated. Figure 7 highlights the two largest median local ellipsoid height values [Camping (3.19 cm) and Buffalo 2 (2.46 cm)]. The observations and residuals of the baselines in the area should be closely analyzed.
Figure 8 is a plot of the local ellipsoid height accuracy value with the absolute dU residual values. If the user follows all of the NGS 58 guidelines, then all baseline residuals should be small (less than 2 cm). In this project, the largest “dU” residual is 1.86 cm. Saying that, the network design could be modified to try to improve a station’s median local ellipsoid height accuracy value.
For example, station Buffalo 2 has a median local ellipsoid height accuracy value of 2.46 cm (see Figure 7). It’s only involved in one loop, and it’s relatively large. The loop has five baselines consisting of lengths of 13.5 km, 9.8 km, 7.9 km, 4.6 km and 0.7 km. Two of the baselines lengths are greater than the guideline’s average baseline recommendation of 7 km, but all repeat baselines meet the 2 cm guidelines, and all residuals are “reasonable.” Adding another baseline between two different stations to create two smaller loops from the one larger loop would decrease the size of the loop and increase the redundancy in the network.
In this particular case, station Buffalo 2 has a published NAD 83 (2011) ellipsoid height, and the difference between the adjusted height and the published height is only 1.1 cm (Figure 5), indicating the new survey is consistent with the old survey. Station Camping also has a published NAD 83 (2011) ellipsoid height, and the difference between the adjusted ellipsoid height and published height is -1.9 cm (Figure 5). Once again, this indicates that the Rowan County GNSS survey is consistent with the previous survey.
This column focused on describing procedures for analyzing a project’s GNSS-derived ellipsoid heights. As previously stated, it important to ensure that your GNSS-derived ellipsoid heights meet the desired accuracy of the project before using the survey data to estimate GNSS-derived orthometric heights.
Figure 7. Plot of NCGS Rowan County Height Modernization project’s median local ellipsoid height accuracy values.Figure 8. Plot of NCGS Rowan County Height Modernization project’s median local ellipsoid height accuracy values and absolute dU residuals.
So far, this series has addressed the following topics:
basic concepts of GNSS-derived heights
NGS’ guidelines for establishing GNSS-derived ellipsoid heights (NGS 58)
differences between hybrid and scientific geoid models, and
procedures and tools for detecting GNSS-derived ellipsoid height data outliers.
These four columns were meant to provide the reader with basic concepts and procedures for estimating GNSS-derived ellipsoid heights.
My next column, which will appear in the February 2016 Survey Scene newsletter, will discuss procedures for estimating GNSS-derived orthometric heights. Determining valid NAVD 88 published heights is very important when using GNSS data and geoid models to estimate GNSS-derived orthometric heights. NGS has documented these procedures in NOAA Technical Memorandum NOS NGS-59. The NGS 59 guidelines are separated into three basic rules, four control requirements and five procedures that need to be adhered to for computing accurate NAVD 88 GNSS-derived orthometric heights. The next column will address the NGS 59 guidelines.
Topcon Positioning Group is collaborating with DAQRI, an augmented reality company, on wearable technology designed to change the way construction and survey professionals interface with the job site.
DAQRI is the creator of the DAQRI Smart Helmet, an industrial-grade wearable that seamlessly connects humans to their work environments by providing information about the world around them.
Topcon and DAQRI will work together to create a solution designed to make workers on the job safer and more productive through the use of augmented reality technologies. They plan to do this by integrating DAQRI’s hardware and software solutions with Topcon positioning solutions.
The DAQRI Smart Helmet was designed for the industrial workplace. It includes an advanced sensor package, an intuitive user interface that requires zero calibration, and a battery that lasts a full shift.
Powered by 4D Studio, DAQRI’s software platform for positioning, the partnership will allow construction workers to view information from their projects in the real-world work environment to make their workflows safer and more efficient.
The collaboration is designed to bring wearable technology to a wider AEC (architecture, engineering and construction) user base, empowering the wearer with a hands-free tool that can be used on the job, Topcon said in a news release.
“DAQRI is a leader in providing solutions in outdoor environments, which will meld well with our positioning and software innovations,” said Jason Hallett, Topcon vice president of product management. “It’s the first step in utilizing our mutual synergies to develop rugged, heads-up display technology for our marketplace.”
“We are committed to developing innovative solutions that power the future of work and Topcon is at the forefront of the industry with some of the most innovative products that are being used by millions of workers across a variety of environments,” said Matt Kammerait, vice president of product, DAQRI. “This makes them the perfect partner to integrate the Smart Helmet into existing workflows. We look forward to seeing how our partnership re-defines the nature of ‘work,’ by setting a new standard for wearables in the AEC space.”
Esri has released an interactive map illustrating the earth’s natural and human systems and how they have changed — and will change — over time. With the Atlas for a Changing Planet story map, scientists, policy makers, planners and activists can examine detailed spatial information that is critical for adapting to a warmer future.
“Mitigating the effects of climate change is a global, geographic challenge,” said Jack Dangermond, president of Esri. “Understanding how the earth’s systems interact and transform is an essential first step in measuring the threat of climate change and making informed decisions to reduce it.”
Atlas for a Changing Planet explores a sample of maps, imagery and data from Esri ArcGIS Online. The story map covers five themes: understanding natural systems, mapping human systems, mapping ocean impacts, predicting the future, and international cooperation.
Complex issues, processes, and concepts — such as biomass and ocean acidification — are clearly and succinctly explained with maps and multimedia, Esri said. For example, users visualize the density of carbon stored in living plants (biomass) with an explanation of how this information is key to estimating how land-use change affects the climate. Interactive maps illustrate which areas will be severely affected by rising sea levels, the changes in sea ice extents in the Arctic Ocean, and population growth in urban cities around the world.
The story map also models data from the National Center for Atmospheric Research (NCAR) in three scenarios. With this data, users navigate the story map to see projected changes in temperature and precipitation based on the level at which greenhouse gas emissions increase or decrease over time.
Esri created the story map in time for the Nov. 30 start of the United Nations 21st Conference of the Parties (COP21). World leaders are gathering at the annual meeting to negotiate an international agreement with the goal of keeping global warming’s increase below 2 degrees Celsius.