An exclusive interview with Ken MacLeod, Director of Product Management and Gordon Echlin, Director of Business Development at Calian GNSS. Read the full story and additional exclusive interviews here.
What are the main challenges and issues for GNSS antennas in agriculture, as opposed to, say, surveying or construction? How do your products address them?
KM: Many agricultural applications use L-band GNSS corrections, which are broadcast from a geostationary satellite (located above the equator). If you’re close to the equator, the geostationary satellite is roughly above you. However, as you move away from the equator, the look angle gets lower and lower. In Canada and northern Europe for example, the look angle is low, and the signal path is longer than at the equator. Therefore, you need an antenna that has low elevation angle gain. Calian has several antenna products that have great low elevation angle gain.
One of the other differences is antenna mounting. Agriculture requires positional accuracy, so mounting an antenna on a farm machine is not a trivial matter. On metallic machinery, radio frequency surface currents and reflections (multipath) will degrade the antenna radiation pattern, and RF noise coming from other electronics on the machine can interfere with GNSS.
Most GNSS applications now are full band. The challenge is designing antennas that are small and full band, and which also reduce local multipath on the machine.
You mentioned that these antennas are small, but on a tractor, size, weight and power (SWAP) is not a big concern. So, why is size an issue?
KM: As you mentioned, for most large farm machinery, SWAP it’s not a problem. It is, however, for UAVs, which are being used to spray crops with herbicides and pesticides where a small light weight antenna is beneficial.
Do most farm machines now use two antennas for their heading?
KM: Many agricultural applications use the moving base technique to estimate a precise heading which can be used to monitor pass to pass overlap. Calian GNSS have smart antennas that support the moving base application.
You also need to sense obstructions on the ground, but I guess that somebody else deals with integrating other sensors, such as inertial ones, with GNSS.
GE: Calian GNSS smart antennas (GNSS receiver built-in to the antenna) have built in Inertial Measurement Units (IMU). We also have smart antennas that employ the L1-L5 observation pair rather than L1-L2, since the L5 signal is stronger and performs better under cover. L5 uses an enhanced signal architecture with 10x faster chipping rate (10.23MHz) offering more precise standard localization and improved multipath mitigation for reflections exceeding 29.3m
[Shared a screen with eight antenna models.]
What are the key characteristics of your antennas regarding precision agriculture?
GE: Our GNSS agriculture antennas support centimeter level precision, have best in class lower elevation angle gain enabling L-Band correction reception (at northern and southern latitudes), and eXtended Filtering (XF), which creates very deep attenuation of nearby out of band radio frequency signals.
KM: We have deep GNSS antenna knowledge and we know how to integrate receivers into antennas. So, out of the box, you can buy from Calian GNSS a fully functional smart GNSS antenna that outputs a digital signal. Having a digital signal from the antenna to the smart ag controller simplifies and reduces the cost of the installation. Many customers, especially in the autonomy space, know software very well but are not hardware specialists. We remove the problem of integrating an antenna and a receiver into their product, and customers can start solving their PNT application.
GE:There are many startups that don’t understand RF; there are not enough GNSS and RF guys around. Let us take care of the antenna rand receiver integration. Then customers just take the RS-422 or RS-232 signals and read the receiver’s messages or NMEA data and use our ROS2 driver.
Does the installation take place at the factory or at the dealership, or do growers do it themselves?
GE: We provide products to OEMs who designed our products into their machinery. There are also system integrators and aftermarket system providers that use our smart antennas. We offer advice and consulting services to customers who design the products and do the installs and ask us to recommend where they should place the antenna to get the best performance. Let’s say that you have a large metal roof with a patch antenna. The GNSS signal can bounce off the roof or run on top of a metal surface and reach the antenna and interfere with the direct signal. To mitigate these problems, we often provide installation advice.
What are some of the GNSS receivers that you use?
GE: Calian GNSS provides smart antenna products with Septentrio, uBlox or ST-Micro receivers built in. Our ceramic patch antennas typically use a ZED-F9P, which you can use as either a base or a rover. It can take in PPP-RTK corrections through L-band signals. We can also take commercial RTK services, such as those from Point One Navigation or from Swift Navigation. Or, if you have a big farm and many different pieces of equipment that need precise positioning, you could set up your own RTK base, which provide precise positioning for a radius of up to ~20 kilometers from the base station. The point is that we support correction services and are not bound to one service provider.
An exclusive interview with Kirstin Schauble, Director of Systems Engineering at ANELLO Photonics. Read the full story and additional exclusive interviews here.
What crops are we talking about? What positional accuracy do they require? What accuracy can you achieve?
Where ANELLO has been of use in agriculture, typically we’re talking about orchards or dairy farms, because these are the use cases where you have limited open sky view, or, in some cases, no open sky view. For the orchard case, you have high-value crops, such as almonds or walnuts, where you’re driving your tractor in between these very narrow rows with trees completely covering the sky above you. So, in this case, there’s hardly any GPS availability and certainly no RTK-level GPS, which poses a challenge for autonomy in these types of agriculture environments.
Some of the stricter position requirements are on the order of 20 cm to 30 cm, which is approaching RTK-level accuracy. You can’t achieve this with just standard GPS, even under open sky. In those cases, you really need RTK-level GPS and open skies before you enter the orchard’s GNSS-denied area. As you know, RTK gives you 2 cm accuracy.
Then you need to have a dead reckoning capability that can keep you within a 20 cm to 30 cm error. This is typically posed as a cross-track error. Errors in the direction of the distance traveled are slightly less important because you can tell based on visuals when you exit a row. However, while you’re in the row, you don’t want to run into a tree, so that cross-track error is important.
Plus, you can use wheel odometry for the direction of travel.
Yep, exactly. We also found a lot of success in those cases where you have our optical gyro technology plus the wheel speed odometry. Without the wheel speed, you’re relying heavily on accelerometers. Growers need small and cheap systems. They cannot afford to pay $100,000 for a reference-grade system. So, they are probably going to use MEMS accelerometers, which is what we use.
So, wheel speed aiding is extremely important to maintain that distance traveled.
So, the positional accuracy requirement is typically 20 cm to 30 cm and you can achieve that with your system.
Correct.
How much does your application cost? Is it installed at the factory, at the dealership, or by the grower? What’s the learning curve for the grower?
Our main innovation has been in the gyroscope space. Early on in our development of silicon photonics optical gyros, we realized that the main use for them is in navigation for autonomous platforms — such as cars, UAVs, and autonomous boats. Our gyro isn’t something that we can just sell into a market like agriculture on its own. Tractors typically just have a GPS input, then the autosteering system takes care of the rest.
So, our job is to replace that GPS input with our INS input. It uses GPS under perfect open sky. However, when you don’t have those conditions, it integrates the optical gyro and performs high-end dead reckoning, also using the wheel speed odometry, and our advanced sensor fusion engine. We have put years of pretty smart brains towards getting that engine fine-tuned, specifically for the high-end gyro that we have.
It’s very difficult to be an algorithm engineer where you have just a MEMS gyro, MEMS accelerometers, and no real speed data. There’s not much you can do with that. But if you have the high performance of optical gyroscope technology, it enables you, as an algorithm engineer, to dead reckon very accurately without GPS. Then you integrate all that and feed it into the GNSS input on the auto steer system.
Who does that integration?
We do all the inertial measurements internal to our system. We read in the wheel speed. We do all the sensor fusion with GPS. Then, we output the tractor’s position, which is far more accurate than it would be just using GPS. So, we do everything that a typical GPS receiver would do, and we send out a position, velocity and attitude.
Who does the integration depends on whether it is a retrofit or built from scratch. If you are, let’s say, John Deere, and you own the entire autonomy stack within this tractor, then you can take our input, add cameras, maybe add a lidar, and you can have your own fusion of those sensors. We have our own sensor fusion with inertial measurement units and GPS. The tractor’s autonomy stack can do the sensor fusion with our output and other visual sensors, such as cameras and lidars. That’s typically what a full autonomy stack might look like.
However, some farmers just have standard, manually driven tractors but want to know where their workers are and want to document exactly which rows were sprayed, because if you skip a row pests can find their home in those trees and then spread from there. So, if you miss a row, it’s as if you had not sprayed the entire acre or the entire orchard. It’s pretty high stakes.
Also, they often drive at night. It’s a difficult job. They might have to go refuel, then come back and start on the wrong row.
The distance between rows is going to be a lot more than 30 cm, so you don’t need that accuracy to identify a row.
Totally. I’m getting into the autonomy use case, for which you need that 20 cm to 30 cm accuracy.
For the documentation use case — where you just retrofit a tractor with our technology — all this data is saved, then maybe they download the file to their laptop and see exactly which rows were sprayed. Maybe they see that a few rows were missed, so they can go back and spray them the next morning. We found that human error, such as missing a row or double-spraying one, is a big problem. It is true that, for that purpose, you don’t need 20 cm to 30 cm accuracy, but you’d really like to have at least 1 m to 2 m accuracy, which you would not get under heavy canopies without some sort of dead reckoning.
So, you feed the position, speed, and attitude from your integration into the pre-existing input that was made to receive a signal from a GNSS receiver?
Yeah, that’s exactly right.
Is it standard NEMA messages?
Many of these autonomy systems are basically hard coded to accept these messages straight from a GPS source. We put our inertial solution into these messages so that they can be easily ingested by pretty much any autonomy stack that would be using GPS. It’s a simple plug-and-play to exchange someone’s GPS receiver with our INS solution. Obviously, they need to do some testing to optimize placement, installation and stuff like that, but in terms of interfacing, it’s a plug-and-play switch.
You just used the pronoun “they.” So, who is “they”? Do you have privileged relationships with some of the large manufacturers, such as John Deere? Do you sell your box to dealerships, who then sell it to farmers? Or can farmers order it directly from you and plug it in?
Great question. Unfortunately, I can’t give names of customers, but typically the earliest entryway into this market is companies that can easily adopt new technology and who are innovating very heavily in the autonomy and ag space. There are several players in that arena and we’ve found a lot of success there. Many companies are retrofitting existing tractors with an autonomy stack. There are companies that do retrofitting. They take commercial-off-the-shelf (COTS) systems such as ours, or a lidar or a camera, and retrofit a tractor. That’s the business model for some companies.
Others are building, completely from scratch, an autonomous robot that is performing certain tasks, such as spraying or harvesting inside an orchard.
In both of those cases, those who buy your products are integrators who build and sell systems, not dealers or end users.
Yes, they either build systems or retrofit tractors. The dealership is a very good option, because the manufacturers of these tractors have skin in the game for staying ahead on autonomy. They want their tractors to be known as having the highest tech. So, for a dealership to offer our state of the art, autonomy-enabling technology would be a huge benefit to the company.
We have field applications engineers involved — either training dealerships to retrofit or with the integration. So, we might be involved in that integration. So far, however, the earliest market for that has been with companies that are integrators themselves.
When you’re talking about autonomy, are you talking about totally autonomous machines that roam the fields without a driver in the seat or about steering tractors that still have drivers to monitor them and can intervene as needed?
My understanding of how autonomy transforms an agricultural machine is that you start with manual drivers and then move toward autonomy. It is similar to the addition of advanced driver assistance systems (ADAS) to passenger vehicles. Eventually, you have no driver.
I would imagine that farmers who own a tractor and are trying to retrofit — or, maybe, a company like John Deere that sells tractors — might start off with an autonomous tractor that still has a steering wheel and a seat but eventually could just drive itself, once that trust is gained. Trust is the key word. For many of these farmers, it’s hard to go from everything being completely manual and in their control to fully trusting autonomy.
In some cases, that trust can be gained through full testing, over and over again, and continuous improvements. It’s possible for a farmer to go from fully manual to fully autonomous immediately, but I imagine that there’s a transition period during which tractor manufacturers are still adding steering wheels while also integrating more and more autonomy in their tractor systems.
In the agricultural environment, besides INS, which sensors — such as radar, lidar, cameras, and odometers — are most useful? For example, for obstacle detection.
Besides knowing where you are, the most important thing in autonomy is obstacle detection. If a dog runs into the orchard, you want to be able to stop. You can do this with either lidar or radar, which are both depth sensors.
Cameras, plus AI, enable you to identify objects.
You would want a stereo vision camera, so that you can tell the how far the object is. Every company has a different approach to this. Ideally, you have every sensor, but it’s a cost of computation tradeoff. Everyone takes that tradeoff differently, but it’s some combination of cameras, lidars, and radars.
Do you integrate other sensors — such as lidar or cameras — with your inertial systems?
We just do the inertial navigation part and the others integrate.
Every time you acquire the GNSS signals after an occultation, such as under heavy canopy, you re-initialize the INS, correct?
When you start up the system, to know where you are you need to have GPS signals. So, the best scenario would be to start up the system under open sky. However, we’ve found through working with our customers that this isn’t always the case. An autonomous tractor might just stop spraying for the night in the middle of a row and continue its mission the next day. So, they sometimes need to start up under heavy canopy, which means that they wouldn’t be able to acquire GPS signals, at least not accurate enough. In that scenario, we’ve added a functionality to boot up with your last position. What customers often do with this feature is to constantly save their last position and heading from our system; then, as soon as the system boots up, they can decide whether to start from their last known position.
We leave that up to the customer, because there are some cases in which you might boot down the system and then boot it up and it’s somewhere else — for example, often an autonomous tractor will get towed to move it a long distance. If we just always booted it up with its last position that would cause issues in those scenarios.
So, there are always these edge cases. That’s why we have this feature where the system itself will determine whether to boot up with its last known position or with GPS.
Hopefully, that will become standard soon for car navigation, so that when you start driving from a parking space the system already knows which way you are facing and will guide you accordingly — rather than you having a 50/50 chance of starting out in the right direction!
An exclusive interview with Chad Huedepohl, precision agriculture portfolio manager, Autonomy & Positioning division at Hexagon. Read the full story and additional exclusive interviews here.
Precision agriculture has been around for more than 30 years. (GPS World published several issues of a supplement on the subject about 26 years ago.) What have been some of the key turning points? What options do farmers have now that they did not have, say, five years ago? Are the main improvements in accuracy, repeatability, reliability, or cost?
The term precision agriculture started to come into play when yield monitoring was first invented and brought to market. One of the first successful ones was through Ag Leader Technology and their yield monitoring system, which then added positioning through GPS to start mapping where the yields were coming from. This then created the ability to start managing farmland and zones based on productivity. In turn, this very quickly evolved into also mapping soil sampling results and directly tying that type of information to point-specific yield information from a field. Auto-steering systems had been on the market prior, but really started becoming part of the precision agriculture portfolio in the late 90s.
The industry took off in that direction for several years, then started to get into variable rate application of fertilizer, which was another way of more intimately managing the farmland. That then led, in the early 2000s, to the coming to market of auto-swath technology, which made it possible to turn on and off the different implement sections on application equipment — primarily, sprayers and spreaders. This enabled the operator to avoid putting a second application where you had already been, as well as making sure you had full coverage and no skips.
In the mid-2000s, autosteering systems started to become standard on newer equipment and soon became a key product in the aftermarket. Auto-steering had a major impact on farmers because it gave them better efficiency, but also helped provide more hours of productivity per day. It enabled them to focus on other things and not be so physically and mentally drained by the end of the day because of constantly concentrating on where the machine had to go. It allowed them to pay better attention to the equipment and the application that they were set up to do.
So, the combination of swath control and auto guidance is what sent the precision ag world into major acceleration, which eventually led to planter control. The company Precision Planting emerged into the precision ag space at about that time, drawing awareness of the need to utilize precision on row-crop planters. The industry soon started getting into much more finite monitoring and precision ag soon became an integrated featureset into planter equipment, rather than just an add-on.
More recently, we’ve started the trend toward autonomy. It’s not mainstream yet, though. We started putting a lot more focus on live sensors, including camera imagery. There’s been some evolution toward sensors on the implements that make those decisions on the go. It’s catching on somewhat. It still does not have a whole lot of market penetration, yet that’s changing rapidly.
When it comes to GNSS, I think the biggest part has been reliability — on a farmer’s terms. “Can I really count on this system to do what I’m asking it to do?” Farmers view that as reliable in the GNSS world. We then start asking, “What is reliable? Is it accuracy? Is it repeatability? Is it integrity with the actual position?” Growers think about all those things. They do not necessarily focus on one thing versus another.
In terms of the integration, of how they use it in the cab, reliability has had the biggest impact on that, then cost has brought in more people. In the early days, just autosteering cost north of $20,000. Nowadays, a complete systems will cost somewhere around $20,000, so the out-of-pocket cost has not necessarily come down a lot, but what you’re getting for that value has advanced significantly. If you want to do just entry-level autosteering, that can be done relatively inexpensive compared to the early days.
Most growers today are doing far more than just navigation.
I was familiar with this history because I’ve written a dozen articles on precision ag over the past 20 years, but the way you summarized it was great. One thing you didn’t touch on, however, is the vast expansion in options for corrections data.
I’m glad you brought that up. Corrections have been an important part of the evolution of precision agriculture as well. When farmers plant this field or spray that field, they want it to be done reliably. That is where accuracy comes in. Earlier in my career, real-time kinematic (RTK) positioning was very expensive and satellite-based augmentation systems (SBAS) were not as stable.
Also, RTK systems and such used just single constellation for the longest time. We started adding in GLONASS and then positioning correction providers, which gave us a lot more robustness. Some of the early challenges with RTK were having enough common satellites with baselines. I think that really took off in about 2009. Prior to then, it was mostly just SBAS or RTK.
There was also PPP, but the challenges that the industry was facing with PPP was the long convergence time. It used to be common for conversions to take 40 to 50 minutes. Then you would drive underneath one tree on the edge of a field and you had to start all over. When you’re talking about the actual cost of a farming operation, having to sit idle because of something like that did not sit well with farmers. So, PPP corrections struggled to take off. Because of those early experiences, it took a long time for the market to start to accept the newer PPP models that we’ve seen in the last, say, seven or eight years.
Now there are farmers who enjoy the reliability of those PPP corrections, because the redundancy and resiliency between the different providers, such as Hexagon providing TerraStar services, through vegetation and being able to withstand some outages, definitely sits well with customers.
The accuracy and convergence times have also improved significantly. At the end of the day, it’s one fewer thing that can go wrong for them or their dealer to have to deal with. I don’t have to worry about the state-sponsored continuously operating reference station (CORS) network going offline, about software updates or cellular issues, or, season to season, someone having to make sure that their system is all up and operational. A PPP solution is automatic. It either works or it doesn’t. That’s something that farmers like. They don’t like to have to deal with all this other integration technology.
What’s PPP’s convergence time now?
With TerraStar-C PRO, we’re often seeing a convergence time of less than five minutes. We have a fast startup time. So, if the tractor was shut down, already converged and you turn it back on, most people are going to be reconverged in just a minute or two.
That’s a hot start.
Yeah, right.
Precision agriculture involves collecting data (on the ground and from the air), analyzing the data, creating maps, displaying the maps in the cabs of tractors and other machines, and using the maps to guide those machines as they water, spray, plant, and harvest crops. So, it involves hardware, software, data, analyses, and decisions. Besides making GNSS receivers and providing corrections via TerraStar, in which aspects of precision agriculture is Hexagon involved? For example, do you store and/or analyze any of the data that growers collect or create maps for them?
We sell displays and controls that operators use that control equipment and collect the data for the farm. Many of our agriculture OEM and technology customers have their own software solutions that provide their crop growers with the tools they need to manage their farms, and Hexagon provides the hardware that feeds into them. However, Hexagon does have a software portfolio that provides tools for operation planning, monitoring and analysis to large enterprise farming customers like those in the sugarcane, bioenergy and forestry industries. In summary, we sell the control equipment — basically, the display interface — as well as rate control and implement control functionality. We sell the TerraStar PPP corrections as well as RTK corrections through Hexagon’s SmartNet.
Do you have any unit that does a service for the growers of analyzing that data and creating the maps they use for planting, watering, and spraying?
No, Hexagon does not provide any after-the-fact data analysis, certainly not for row crops.
How is the adoption of precision agriculture proceeding in the United States? For example, roughly what percentage of growers currently use autosteer on their tractors?
I don’t have any reports to reference other than those from USDA. Adoption rates across most row crops in the United States are going to typically be north of 70%. On machines built in the last five years, you’re talking about an adoption rate of more than 90%. Acres of crops grown using auto steer are probably 80% in North America. More than 50% of that is using a correction that is more accurate than just simple SBAS.
What is the division of labor between Hexagon and the manufacturers of tractors, combines, sprayers, and other agricultural machines – such as John Deere, AGCO, Case IH, Kubota, Massey Ferguson, etc.? Do you have privileged relations with any of them? Are your guidance systems typically installed at the factory or by dealers?
We go to market in a couple different ways, and we’re involved with most of the leaders in precision agriculture. We’re providing solutions t — whether OEMs, regional OEMs, or after-market solutions. So, we’re involved in most of the leading precision agriculture solutions in the global market.
OEM solutions are factory-installed and the grower doesn’t even see the name Hexagon anywhere, correct?
That is true in many or our partnerships. We are a factory option and some of the leading OEMs do both white label as well as branded. We’ve been providing NovAtel branded receivers to AGCO for many years, through their channel, both factory-installed and aftermarket. Some of the others, such as CNH, are white labeled, so it would just say “Case-IH” or “New Holland” and have no Hexagon markings.
Is the aftermarket phasing out as it becomes standard for these solutions to be factory-installed on new machines?
Yes and no. In some ways, there is more adoption of aftermarket products to pair with the mainline factory systems, but many of the shorter line OEMs and aftermarket solutions are accessing parts of the market that have machines that originally came with factory-installed solutions that are now antiquated, so they want to upgrade to get more out of it.
You also have increasing consolidation — such as AGCO’s joint venture with Trimble and CNH’s acquisition of Hemisphere — so there are fewer GNSS providers for competing brands to utilize in the market.
Does the signal into the autosteer use the NEMA standard, so that you can just replace the old receiver with a new one?
Most of the companies, whether they’re OEMs or aftermarket solutions, have some type of proprietary integration. There are products that are just NEMA; they are typically at the lower end and priced much lower. The higher performing flagship products are usually doing a more customized integration.
Would you like to highlight any recent Hexagon products or services in the precision agriculture area?
Probably the biggest one is bringing more awareness to the TerraStar-C PRO and the TerraStar-X Corn Belt products and a lot of the ionospheric resiliency that we’ve been able to improve with those products. They provide more robustness and reliability in challenging ionospheric scenarios. Especially in the Brazil market, some growers were often experiencing hours of downtime due to ionospheric scintillation. With the ionospheric enhancements that we’ve added that downtime now is down to just a few minutes here and there.
Another one would be enhancements that we’ve been bringing to the autonomy market, such as dual antenna solutions and geofencing, for safety.
Who integrates the other sensors used for safety, such as lidar or radar?
That’s a key area we’re focusing on. We are currently working with specific integrators with our perception system. We have perception systems that primarily utilize cameras, but we can also utilize lidar and other sensors.
All three organizations are United Nations agencies and have previously issued similar statements independently. This is the first time they have spoken on this in one voice.
In 2020, ICAO issued a letter to all member states urging them to “strengthen CNS systems resilience and mitigate interference to GNSS.” It contained 13 recommendations resulting from three different work streams within the organization. The last of the recommendations was “… to support the multi-disciplinary development of alternative positioning, navigation and timing (APNT) strategy and solutions to complement the use of GNSS in aviation in coordination with ICAO and airspace users.”
In 201, IMO issued a circular on deliberate GNSS interference.. It called on nations to prevent interfering transmissions coming from their territories, issue warnings about known interference, and consider taking actions to prevent unauthorized interfering transmissions.
This ITU circular urged nations to “address the critical issue” by:
Reinforcing navigation systems’ resilience to interference.
Increasing collaboration between radio regulatory and enforcement authorities.
Reinforcing civil-military coordination to address interference risks associated with RNSS testing and conflict zones.
Increase coordination between aviation, military and radio-regulatory authorities.
Retain essential conventional navigation infrastructure for contingency support in case of RNSS outages and develop mitigation techniques for service loss.
A resolution by ITU’s 2023 World Radiocommunications Conference echoed similar themes. Still, it was criticized because its cautions and prohibitions came with the caveat, stating “…without prejudice to the right of administrations to deny access to the RNSS, for security or defense purposes.”
Many observers opined that there are few reasons for nations to interfere with GNSS other than security or defense concerns, which allows malicious actors to have carte blanche. Furthermore, it was suggested that the resolution might have included language to ensure that security and defense-related disruptions do not extend beyond a nation’s borders or similar provisions.
While no specific events are cited in the statement as motivating its publication, the death on Christmas Day of thirty-nine people aboard an Azerbaijan Airlines flight could have been the reason. The aircraft was approaching a Russian airport during an intentional interference event and was apparently misidentified by Russian forces. It was subsequently damaged by ground fire and crash-landed in Kazakhstan.
The recent joint statement cites, among other international agreements and actions, the ITU Constitution, which says, “All stations, whatever their purpose, must be established and operated in such a manner as not to cause harmful interference to the radio services or communications of other Member States.”
The joint statement concludes with:
Therefore, ITU, ICAO and IMO jointly and urgently call on their respective Member States to:
Protect the RNSS from transmissions that can adversely cause harmful interference, degrading, interrupting, or misleading signals used for civilian and humanitarian purposes.
Reinforce the resilience of the systems that rely on RNSS for navigation, positioning, and timing in relation to this type of interference.
Retain sufficient conventional navigation infrastructure for contingency support in case of RNSS outages and misleading signals, and develop mitigation techniques for loss of services.
Increase collaboration between radio regulatory, civil aviation, maritime, defense and enforcement authorities.
Report cases of harmful interference affecting RNSS to the appropriate telecommunication, aeronautical, and maritime authorities and the ITU Radiocommunications Bureau to enable the monitoring of the situation.
The United Nations and its agencies are collaborative bodies that operate by consensus and through the cooperation of members. As such, they have no ability to enforce standards or compel compliance with recommendations.
The Japan Aerospace Exploration Agency (JAXA) has selected Spirent Communications to supply its lunar positioning, navigation and timing (PNT) simulation solution. The solution will support JAXA’s lunar exploration efforts and aid in developing essential navigation infrastructure for future moon missions.
Spirent’s PNT X solution allows JAXA to simulate lunar PNT services in a controlled laboratory setting before their deployment on the moon. This capability is critical for testing and validating navigation equipment for lunar missions in accordance with the emerging LunaNet specifications, which include adaptable S-band frequency solutions. The system also ensures scalability for future space exploration.
Using the PNT X system, JAXA can experiment with novel S-band signals and evaluate the performance of receivers that rely on standalone S-band Lunar PNT signals or a combination of Lunar PNT and Earth-based L-band GNSS infrastructure. The simulation of these signal combinations demands high levels of precision, which Spirent’s specialized architecture is designed to meet.
This collaboration builds on a longstanding relationship between Spirent and JAXA. In 2011, JAXA utilized Spirent’s simulation technology to verify the performance of early Quasi-Zenith Satellite System (QZSS) receivers. Since then, Spirent simulators have supported multiple advancements in QZSS.
Spirent’s lunar PNT simulation solution seeks to present new opportunities for space agencies developing lunar constellations, satellite and receiver developers and organizations planning lunar missions or seeking to establish additional PNT infrastructure on the moon.
With the United States now recognizing the Gulf waters as the “Gulf of America” and not the “Gulf of Mexico,” digital map creators are deciding how best to reflect the name change for their users.
TomTom, for example, is introducing a U.S. geopolitical view for its users in the United States; they will see “Gulf of America.” Translations will be available in English, Spanish, French and German, and users searching for “Gulf of Mexico” will find the “Gulf of America.” Map users outside of the United States will see the default map view showing the “Gulf of Mexico.” Users searching for “Gulf of America” will find the existing “Gulf of Mexico” feature. All users will be able to change the view based on their preferences.
The company also expects to update its APIs, such as Search API, Geocoding API and Map Display APIs.
TomTom says its decisions are based on how the Geographic Names Information System and the International Hydrographic Organization view the name change.
OxTS has released WayFinder, a new localization solution designed for use in GNSS-denied environments. The system combines a GNSS/INS system, onboard processor, lidar scanner and two cameras to enable accurate positioning in areas with limited satellite coverage, such as urban canyons and underground tunnels.
Precise localization data is crucial for various industries, including autonomous navigation, automotive testing and sensor data georeferencing. However, obtaining accurate positioning information in areas with weak or unavailable GNSS signals has been a persistent challenge. WayFinder is designed to operate with minimal setup, requiring only basic configuration before use. The system’s key feature is Lidar Boost, a new software technology that enhances GNSS/INS performance in environments with unreliable satellite signals.
Lidar Boost employs advanced algorithms to process data from the integrated Lidar scanner, compensating for missing or erroneous GNSS updates in real time. This allows WayFinder to maintain high-accuracy localization in areas with limited satellite coverage and ensure smooth transitions between GNSS-supported and GNSS-denied environments.
The system can be used across multiple sectors. In ports, it can provide precise localization for autonomous vehicles operating among stacked shipping containers. In mining, it can support navigation for both underground and surface vehicles. WayFinder also offers a solution for indoor automotive testing without the need for fixed infrastructure. Surveyors working in areas with intermittent GNSS coverage can also benefit from its positioning capabilities.
Trimble and PTx Trimble have introduced Trimble IonoGuard, a new technology designed to enhance RTK GNSS signal reliability for precision agriculture applications. The system aims to improve positioning accuracy and reduce signal loss during challenging ionospheric conditions.
IonoGuard is now available for users of the PTx Trimble NAV-900 guidance controller and Trimble base stations equipped with the ProPoint positioning engine. The technology was developed to maintain RTK correction integrity and minimize positioning dropouts during periods of high solar activity.
Solar activity peaks every 11 years, with the next maximum predicted in 2025. This phenomenon can significantly impact GNSS signal stability, potentially affecting precision positioning. Solar Cycle 25, which began in 2024 and is expected to continue through 2026, may present substantial challenges with the possibility of global disruptions.
While solar cycle disturbances often go unnoticed by the public, high-precision RTK GNSS users in equatorial regions frequently experience impacts from solar activity throughout the year, which can lead to costly interruptions in agricultural operations.
IonoGuard is accessible through the latest PTx Trimble Precision-IQ firmware release. When used with compatible GNSS hardware, the system aims to deliver improved RTK performance during both routine operations and periods of solar disturbance.
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focus on high-accuracy positioning for autonomous vehicles in various environments. The papers are available here.
High-accuracy and resilient GNSS receiver for autonomous vehicles
The G3STAR GNSS receiver, a key component of the GAMMS Horizon 2020 project, is designed to improve high-definition navigation map production for autonomous vehicles. This Galileo-based receiver leverages the constellation’s Open Service features, including the High Accuracy Service (HAS) and Navigation Message Authentication (OSNMA). The research team shared that G3STAR’s ability to obtain and decode HAS messages from Galileo E6-B signals, as well as to process OSNMA bits from live Galileo E1-B I/NAV messages, demonstrates its advanced capabilities in providing secure and precise navigation data.
Preliminary tests highlight G3STAR’s proficiency in utilizing Galileo’s new services. However, the research team shared that further evaluation is necessary to fully assess its impact within the GAMMS project. Plans include validating the HAS data’s effect on navigation accuracy, conducting field tests to evaluate OSNMA availability in various environments and assessing the influence of the Chip Scale Atomic Clock on receiver performance. Additionally, comparing the G3STAR’s performance to commercial off-the-shelf receivers will be crucial in determining its overall contribution to the GAMMS navigation system and HD map generation. These evaluations will be carried out during upcoming test campaigns, providing valuable insights into G3STAR’s potential to advance autonomous vehicle navigation.
Filipe Carvalho, Ricardo Prata, Bruno Cardeira, Carlota Cardoso, Rui Nunes and António Fernández; “High-Accuracy and Resilient GNSS Receiver for an Autonomous Vehicle.”
GNSS/INS positioning software library
The autonomous vehicle industry has seen significant interest and investment throughout the past 15 years, with numerous practical applications emerging in the market. However, the technology for functionally safe GNSS/INS localization in autonomous vehicles is still not fully established. This gap is particularly crucial in safety-critical applications, where positioning algorithms must be robust against potential faults, especially in challenging environments. This paper highlights Hexagon’s Safety-Critical Positioning Solution, which addresses this need by providing both precision and safety for autonomous land vehicles.
The Positioning System is a safety-first software library that integrates GNSS signals, state space corrections from the TerraStar-X Enterprise service, inertial measurement units (IMUs) and additional vehicle sensors. This system employs an extension of Receiver Autonomous Integrity Monitoring techniques, originally developed for the aviation industry. It computes multiple navigation solutions using a solution separation technique, including an “all-in-view” solution and several subset solutions that exclude various fault hypotheses. These solutions are used to calculate Protection Levels (PLs), which provide an estimated upper bound on positioning errors, accounting for systematic biases and measurement faults. The PLs can be compared against alert limits to determine whether the navigation solution is sufficiently accurate for autonomous decision-making.
Eduardo Infante, Rudi Gaum and Laura Norman; “Demonstration of a Functionally Safe GNSS/INS Positioning Software Library for Autonomous Land Vehicles.”
Unmanned ground vehicles in off-road environments
This paper explores the emerging potential of radar for localization in GNSS-denied scenarios, particularly in challenging off-road environments where lidar-based systems struggle. The research focuses on two distinct settings: a dense forest and an underground mine. To address the localization challenges in these environments, the team developed a pipeline that combines an adaptive extended Kalman filter (EKF) for unstructured forested regions with a factor graph approach that fuses EKF estimates and point-to-plane radar iterative closest point (ICP) measurements for structured underground environments. The results demonstrate significant improvements in localization accuracy compared to existing methods, with the adaptive EKF proving particularly effective in forested areas.
The study provides valuable insights into the integration of radar and IMU data for vehicle localization in GPS-denied scenarios. While the adaptive EKF outperformed conventional EKF in structured outdoor settings, the standard EKF showed better performance in the highly dynamic conditions of the underground mine. The factor graph approach exhibited improved tracking performance, especially in reducing lateral drift along straight trajectory segments. The research also highlights the importance of selecting high-quality ICP registrations for radar-based SLAM. These findings pave the way for future research directions, including refining adaptive EKF for varied environments, exploring radar-based navigation on feature-sparse roads and enhancing the factor graph framework to incorporate additional sensor modalities.
Petar Mitrev and Mohamed Atia, “Radar-Inertial Localization for Unmanned Ground Vehicles in GNSS-Denied Off-Road Environments.”
GNSS plays a vital role in autonomous systems, providing essential positioning, velocity and timing (PVT) information for platforms such as autonomous vehicles, UAVs and ships. However, GNSS vulnerability to spoofing attacks poses significant security risks, potentially disrupting decision-making processes in these systems. To address this issue, researchers have developed a novel approach called Clock Drift Monitoring (CDM) for detecting GNSS spoofing in autonomous vehicles. Unlike previous methods that focused on directly detecting Doppler bias from measurements, CDM indirectly monitors the adverse impact of Doppler bias on the PVT solution, overcoming challenges associated with bias extraction from raw measurements.
The CDM technique exploits user clock drift derived from Doppler positioning as a detection metric. Under normal conditions with authentic GNSS signals, the clock drift remains stable, reflecting the user’s frequency source stability. However, spoofing conditions introduce counterfeit signals with consistent Doppler bias across all measurements, resulting in abnormal clock drift variations. A Generalized Likelihood Ratio Test-based detector identifies these variations, offering a practical and flexible method for GNSS spoofing detection. Field tests have validated the CDM technique’s effectiveness in real-world scenarios, demonstrating its robustness as a solution for autonomous vehicles to counter emerging cyber threats. This method’s ease of implementation, broader applicability and inherent robustness make it a promising approach for safeguarding autonomous systems against counterfeit GNSS signals.
Ziheng Zhou, Hong Li, Yimin Deng and Mingquan Lu Tsinghua; “Clock Drift Monitoring Based GNSS Spoofing Detection Method for Autonomous Vehicles.”
Read a roundup of recent products in the GNSS and inertial positioning industry from the March 2025 issue of GPS World magazine.
Surveying and Mapping
Photo: Eos Positioning Systems
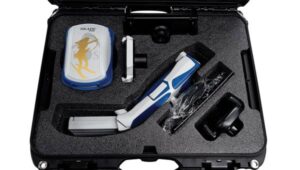
New Eco-Friendly Carrying Case For Eos Positioning Systems’ receivers
The Skadi Gold, Skadi 300 and Skadi 200 GNSS receivers will now be shipped in a field-rugged carrying case made entirely from recycled materials. The case is designed to meet the demands of professionals who utilize GNSS technology in challenging environments. Its construction incorporates durable, eco-friendly materials that can withstand various field conditions, from remote wilderness areas to urban construction sites.
A key feature is its composition of 100% post-consumer recycled resin, which significantly reduces waste and promotes environmental sustainability, according to the company. It is specifically engineered to be shock-resistant and weatherproof.The case is provided as a standard inclusion with every purchase of the Skadi Gold, Skadi 300 or Skadi 200 GNSS receivers at no additional cost.
Multibeam Sonar Designed for bathymetric surveying
The Gemini 1200id is built on the same robust platform as the Gemini 720is multibeam sonar. The device features a 120° horizontal field of view, operating at both 720 kHz and 1,200 kHz acoustic frequencies.
The Gemini 1200id incorporates advanced noise reduction technology to significantly improve the attenuation of waterborne electrical noise to enhance imaging performance. An integrated speed-of-sound sensor ensures high positional accuracy of displayed targets, while CHIRP processing technology enhances target separation over extended ranges.
Compatibility with Tritech’s Genesis software package allows users to control multiple Tritech products from a single interface to streamline operations. The company has also made software development kits available for Windows and Linux operating systems to integrate into various platforms. The sonar’s design includes a custom-developed analog front-end solution with fully differential receiver channels, making it ideal for longer-range applications.
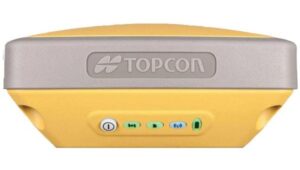
HiPer XRa is a GNSS receiver for surveying, mapping and construction applications. It can benefit a wide variety of users, including construction professionals, surveyors, geographic information systems (GIS) professionals, archeologists, engineering firms and more. The HiPer XR supports GPS, GLONASS, Galileo, BeiDou, IRNSS, QZSS and SBAS.
The new receiver has advanced Topcon Integrated Leveling Technology (TILT) compensation, featuring a calibration-free and magnetic interference-immune integrated IMU that provides up to 60° of tilt for precision measurements in challenging positions. It has signal integrity protection, anti-jamming and anti-spoofing capabilities. Through the myTopcon NOW! website, users can access online training materials, firmware updates and additional software resources.
Airborne Lidar System Ideal for coastline and river surveying
CoastalMapper is an airborne bathymetric lidar system for coastline and river surveying. The CoastalMapper can survey coastlines and rivers 250% faster than previous sensor models, according to Leica Geosystems.
It is suitable for various mapping applications, from assessing infrastructure resilience to monitoring river floods and conducting environmental investigations.
It features a high-performance bathymetric lidar module, a Leica TerrainMapper-3 topographic lidar and an imaging sensor, integrated into a compact and lightweight sensor head. This allows the CoastalMapper to capture up to 1 million bathymetric data points and 2 million topographic data points per second while providing high-resolution imagery with a 5-cm ground sampling distance at typical flying heights.
It integrates with Leica Geosystems’ airborne mapping workflows and offers cluster processing capabilities, allowing users to analyze large datasets and reduce the time from data collection to final deliverables. These outputs can include classified point clouds, digital terrain and surface models, and various imaging products.
Surveying Kit Streamlines base station and checkpoint setup
WingtraGROUND, a comprehensive survey kit, streamlines base station and checkpoint setup for on-site post-processing kinematic surveys with the WingtraONE Gen II, a vertical takeoff and landing UAV. The kit combines receivers, checkpoints and tools into a single, portable workflow.
The system integrates hardware components with a Wingtra tablet interface, which can help surveyors confirm correct receiver placement and avoid common errors associated with improper base station setup and inaccurate coordinates.
Wingtra receivers, equipped with Emlid Reach RS3 technology, provide accuracy within 2 cm, meeting high standards for aerial data validation. These receivers can also function independently for terrestrial surveys in real-time kinematic mode, including point collection and stakeout for various applications.
Galileo HAS-Enabled Receiver Offers positioning capabilities with 20 cm accuracy
The Geode GNS3H supports Galileo High Accuracy Service (HAS). It offers positioning capabilities with 20 cm accuracy worldwide without requiring additional infrastructure or subscriptions.
It is built to withstand tough conditions, making it ideal for demanding fieldwork. The device offers various accessories, including the Geode Grip, which combines the Geode with a data collection device of choice into a single handheld solution. A backpack strap kit and survey pole are also available to enhance mobility and flexibility in the field. The GNS3H can be used for surveying, agriculture, construction, forestry, mining and archaeology.
Expanded Mapping Portfolio 3D mapping technologies and more
Topcon Positioning Systems has become an authorized distributor of Pix4D’s photogrammetry software portfolio.
The partnership aims to enhance reality capture solutions across various industries, including surveying, mapping, utilities infrastructure, public safety, forensics, and architecture, engineering and construction.
The agreement streamlines the procurement process for end users by allowing them to access Pix4D’s advanced photogrammetry software solutions through Topcon’s global distribution network.
The GNSS real-time kinematic (RTK) 5 Click — a compact add-on board for high-precision positioning and navigation demands — features the UM980, an all-constellation multifrequency RTK positioning module from Unicore, with the advanced NebulasIV SoC for enhanced performance.
It supports Swift Navigation’s Skylark precise positioning service, multiple GNSS constellations and RTK positioning for centimeter-level accuracy. The board also features JamShield technology for robust performance in challenging environments, USB connectivity for easy configuration and visual status indicators for module status and GNSS signal reception.
It can be used for a variety of applications, including surveying and mapping, precision agriculture, UAVs, autonomous robots and autonomous driving.
Multi-Band GNSS Antenna Can operate in urban environments
Levity Series’ AHP24510 (L1/L2/L-Band) and AHP54510 (L1/L5/L-Band) directional patch antennas are designed to receive signals from GPS, Galileo, GLONASS and BeiDou satellite constellations.
These antennas offer faster and more accurate signal acquisition and lock, specifically in urban environments. The L-Band capability allows compatibility with high-precision GNSS correction services. The multi-band antennas offer integral redundancy to minimize satellite security blind spots and reduce energy consumption due to faster acquisition, requiring less system uptime to save power.
The Levity Series active antennas feature a 45 mm x 45 mm x 10 mm wide-band, dual-stacked patch design with a dual-feed, low noise amplifier, providing 28 dB to 29 dB gain and filtering. They operate with a maximum antenna VSWR of 1-to-1 from 1,207 MHz to 1,603 MHz, and the passive antenna efficiency ranges from 39.93% to 68.51% in the L1 band. These antennas use right-hand circular polarization to mitigate multi-path interference.
The Levity Series includes other multi-band products for high-precision applications, such as the HP24510A and HP54510A stacked-patch passive components, and the TFM.120A surface-mount front-end module, which covers the full multi-band GNSS spectrum including L-band. These antennas are suitable for various applications, including wearables, transportation, robotics, precision agriculture and autonomous vehicles.
The M9PLUS-HCT-A-SMA is an active multi-frequency GNSS antenna designed for high-accuracy applications. It supports L1/L2/L5 GPS, Galileo, Beidou and GLONASS bands, as well as L-band correction services. The antenna utilizes Maxtena’s proprietary Helicore technology, which offers advanced pattern control, polarization purity and efficiency in a compact form factor.
It integrates a pre-filter specifically engineered to mitigate LTE interference. This is crucial for maintaining signal integrity in environments with dense mobile communication networks, where LTE signals can overlap with GNSS frequencies. The pre-filter can effectively block out-of-band LTE signals, reducing intermodulation risks and ensuring clear GNSS signal reception.
The M9PLUS-HCT-A-SMA is built with rugged, IP67 automotive-grade components and includes an integrated SMA connector. It also features an O-ring for enhanced environmental sealing. Weighing only 24 grams, the antenna is ground plane-independent, making it versatile for various installations. It is particularly well-suited for GIS and RTK applications where high accuracy and reliability are crucial.
The MostaTech G321M is a three-axis fiber optic gyroscope (FOG) that offers high-precision navigation and orientation measurement capabilities. This advanced sensor features a data rate of 8 kHz.
Key features of the G321M include an input range of 400° per second, a bias RMS of 1° per hour and an angular random walk of 0.025 °/√h. Additionally, it has a power consumption of 2 W and an initialization time of 1 second. The G321M is designed with a compact form factor, making it suitable for various applications where size and weight are critical factors.
It is ideal for UAVs, robotics, borehole surveys, image stabilization, gimbal stabilization and underwater vehicles.
High-Precision Lidar Designed for precision applications
The TV1 Lite and the TV1 UAV systems are designed for various precision applications, such as mapping and data collection.
The TV1 Lite features TrueNav technology, a Hesai 32-channel laser scanner and a FLIR 5MP global shutter camera with a 90° field of view. It also includes one year of TV1 Lite Annual Processing with support and maintenance.
TV1 offers customization options, allowing users to choose from 26 MP, 45 MP or 61 MP cameras and various Trajectory Correction Service options.
Flight Control System With autopilot functionality
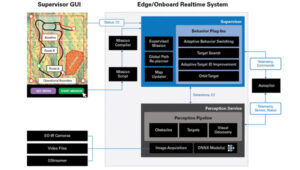
The Prism Supervisor software combines UAV autopilot flight control systems with AI-based observations processed in real time, aiming to enhance UAV operations.
The system provides a programming framework and software development kit for users to create custom mission scenarios. During flight, Prism Supervisor can adapt its autopilot functionality in real time, generating mission segments and flight plans as needed.
The software features a user-friendly graphic interface for mission planning, real-time visualization and execution. It supports Windows, Linux, macOS, iOS and Android.
Remote ID Receiver Enhances airspace awareness and UAV safety
RIDER is designed to enhance situational awareness by providing real-time detection of UAV activity in sensitive areas. It also seeks to provide a clear visibility of surrounding UAV operations to help avoid potential collisions and ensure safer flight experiences.
The device features a built-in industrial chip SIM that provides global coverage through LTE-M and NB-IoT, ensuring connectivity in various environments.
It operates effectively within a temperature range of -20 °C to +60 °C and is rated IP54 for dust and water resistance. The device complies with ASTM F3411-22A and ASD-STAN EN 4709-002 standards, making it suitable for regulatory environments.
The RIDER can detect signals from up to 5 km with its default antennas and up to 10 km when using an optional high-performance antenna. It is equipped with an internal cellular and Bluetooth antenna, along with an integrated GNSS antenna that provides precise positioning and timestamping capabilities. It supports multiple GNSS frequencies and utilizes Bluetooth and Wi-Fi technologies for Remote ID communications.
Streamlined BVLOS Operations For a variety of applications
The Sentaero 6 UAV is designed for advanced over-the-horizon operations beyond visual line of sight (OTH-BVLOS). It features built-in AI and machine learning capabilities for real-time data processing. The system can be used for surveying, mapping, inspection, asset monitoring and more.
Engineered to streamline operations, the Sentaero 6 offers more accurate and up-to-date intelligence on assets. Its onboard computer can processes data mid-flight.
Future developments will include swarm operations, enabling one human to control multiple UAVs simultaneously; fully remote operations and higher safety standards, such as a parachute for urban missions, according to Censys Technologies.
SBG Systems has significantly updated its Ellipse series sensors, incorporating the latest World Magnetic Model (WMM) to enhance accuracy and reliability in navigation applications. This upgrade is available for all Ellipse sensors, including first-generation models.
Designed for unmanned systems such as UAVs, UGVs and marine platforms, the Ellipse series comprises compact, high-precision inertial sensors. These devices feature built-in three-axis magnetometers that measure Earth’s magnetic field, crucial for accurate heading and positioning data.
Updated every five years, the WMM is a globally recognized mathematical representation of Earth’s magnetic field. The latest version, released in December 2024, ensures precise heading and positioning corrections to account for ongoing geomagnetic changes.
NDAA-Compliant UAV Now integrated with ArcGIS Flight
Esri now supports the Astro Max UAV in its ArcGIS Flight application. The Astro Max is the first Blue UAS-cleared and NDAA-compliant UAV to integrate with Esri’s platform.
The Astro Max, developed by Esri partner Freefly Systems, adheres to the security and performance standards set by the National Defense Authorization Act and the Defense Innovation Unit’s Blue UAS initiative. This industrial UAV is designed to enhance the capabilities of government and enterprise users utilizing ArcGIS Flight.
Autonomous Swarm Control Controls various autonomous platforms
The Autonomous Multi-Domain Operations Resiliency Platform for Heterogeneous Unmanned Swarms (AMORPHOUS) software features a single-user interface to operate thousands of autonomous assets simultaneously. Designed with an open architecture, this software enables the U.S. and allied militaries to control a mix of uncrewed platforms, payloads and systems.
AMORPHOUS includes an intuitive and distributed command-and-control interface to give operators the flexibility to conduct a wider array of intricate military missions. This collaborative autonomy at scale will provide warfighters with a decisive overmatch capability.
L3Harris is developing prototypes using the AMORPHOUS architecture on contracts for the U.S. Army and the Defense Innovation Unit. AMORPHOUS has demonstrated flexibility and interoperability by controlling multiple, separate assets across multiple vehicle types operating in different domains during government-managed tests.
AMORPHOUS supports decentralized decision-making, which enables individual, uncrewed assets to perform tasks autonomously and make real-time tactical decisions inside the network.
Advanced Counter-UAV Radar Multi-console radar control and display system
Cambridge Pixel has developed a radar control and display system for Weibel Scientific’s XENTA surveillance radar, which is designed for modern air defense and counter-unmanned aerial systems (C-UAS) applications.
The XENTA radar includes 3D target tracking, continuous target illumination and synthetic receiver beamforming. It is available in two configurations: the XENTA-M for short-range air defense and the XENTA-C for C-UAS operations.
The system is designed to work seamlessly with third-party command-and-control systems, enhancing operational efficiency.
Cambridge Pixel’s library of radar processing software allows users to develop a tailored radar controller specific to the XENTA radar’s requirements. Enhancements were made to existing functionalities, such as improved MIL-STD-2525 overlay graphics and support for dual-redundant operator consoles.
The XENTA radar system can detect small UAVs at distances exceeding 7 km and classify them beyond 5 km. This capability makes it suitable for various applications, including airport security, border control, critical infrastructure protection and event security.
The Pelican 2 agricultural spray UAV has an expanded 300-liter payload capacity and can cover up to 5.3 ha/hr.
It incorporates several technological enhancements designed to meet the demands of agriculture applications. The aircraft features an upgraded four-motor electric propulsion system, a wider 18-m spray swath and advanced lidar and radar systems for fully autonomous day-and-night spraying. These improvements aim to increase efficiency and precision in aerial application while reducing operational costs for farmers.
The Pelican 2’s airframe and structural components are constructed from carbon fiber composites, corrosion-resistant metallic components and 3D-printed assemblies.
SparkFun Electronics has introduced its first ultra-high-precision GNSS timing product, the SparkPNT GNSS Disciplined Oscillator (GNSSDO). Designed for applications requiring sub-nanosecond timing and frequency precision, the GNSSDO is built around Septentrio’s multi-constellation, multi-frequency, L1/L2/L5-ready mosaic-T module.
The device integrates Septentrio’s mosaic-T GNSS timing receiver, Espressif’s ESP32-WROVER processor and the SiTime SiT5358 disciplined 10 MHz oscillator on a single circuit board. It is housed in a custom extruded aluminum case with machined end panels and slotted flanges, making it suitable for installation in weatherproof enclosures or server racks.
The GNSSDO offers impressive timing precision. Its time pulse accuracy is 5 ns, which improves to under 1 ns with an optional subscription to Fugro AtomiChron via L-Band. Event accuracy is less than 20 nanoseconds.
To ensure reliability and security, the Septentrio mosaic-T module provides robust performance even under challenging conditions such as GNSS jamming or spoofing. The system’s multi-constellation and multi-frequency capabilities, combined with AIM+ technology, are designed to enhance resilience. Additionally, the integration of SiTime’s Super-TCXO ensures superior clock frequency stability and accuracy during GNSS outages.