It’s getting bigger all the time, GPS/GNSS business. And coming along in its wake, starting to grow like a sproutly little brother, is GPS anti-jamming, to safeguard the signal in various scenarios.
The anti-jamming market for GPS is expected to reach US$4.8 billion in value and 309.2 thousand units in volume by 2022, according to a newly released report by Research and Markets, a Dublin, Ireland-based market research “store.”
Anti-jam technology sales revenue will increase at a compound annual growth rate (CAGR) of 7.0 percent between 2016 and 2022, while volume goes up 10.1 percent. Major drivers at the moment lie in the military sector, but that could well change in the next decade. The proliferation of low-cost GPS jammers is seeing to that.
Meanwhile, any armed force that puts its faith in guided missiles now feels the acute need for a secured weapons system, something not easy to accomplish. Flight-control applications are especially vulnerable.
North America is the largest and most dynamic sector of the anti-jamming market, given its powerful military and the presence of three top players in the anti-jamming market for GPS: Rockwell Collins Inc. (U.S.), The Raytheon Company (U.S.) and NovAtel Inc. (Canada).
Other companies cited by the report, and given each their own subsection, are Cobham, Mayflower Communications, BAE Systems, Furuno Electric Company, Harris Corporation, Lockheed Martin, Thales Group, Boeing and u-blox.
Breaking down by receiver type, the report studies two major categories: military and government grade, and commercial transportation grade. The market is also analyzed geographically, with sub-sub-subsections devoted to “Threat From North Korea and Disputes With China,” “Dispute in the South China Sea,” and “The Crisis in Syria and Isis.”
Aside from looking — or deriving, more often — numbers according to Anti-Jamming Technique (nulling systems, beam-steering systems and civilian systems), the report does not concern itself overly with technical details. These usually are of little interest to investors, the report’s main target. Thus it will have little of interest for engineers, except for those practicing business development.
A market breakdown by application lists:
flight control
surveillance and reconnaissance
position, navigation and timing
targeting
casualty evacuation
timing installations
logistics tracking
law enforcement
From the Executive Summary:
“The nulling systems type of anti-jamming techniques accounted for a share of 70.0% in 2015; the market was valued at USD 2,180.3 million in the same year and is expected to grow at a CAGR of 6.7% between 2016 and 2022. The market for beam steering systems was valued at USD 662.8 million in 2015 and is expected to grow at a CAGR of 6.9% during the forecast period. A major reason for beam steering systems holding such a low market share is that they are comparatively new in the market since the last decades and hence are not widely used. They are very expensive and are used only on high-end military vehicles such as strike aircrafts. For a long time nulling systems was the only known type of GPS anti-jamming technique. However, with the development of beam steering systems and the civilian anti jamming systems, the market for GPS anti-jamming is expected to increase.”
In July, GPS World asked the experts, “What percent of a GNSS designer or manufacturer’s R&D budget should be devoted to mitigation of jamming?”
“Solving for jamming, intentional or unintentional, in the design of any GNSS technology platform is no longer an option. How much any one company spends is largely a function of how much is spent on engineering overall and of how much has already been invested upfront on jamming mitigation. The required level of jamming resistance of any PNT solution also depends very much on the particular application, which in turn influences the budget allocated.”
“GNSS jamming is a growing concern, and an assessment of risks and an element of testing against the most applicable real world threats should be included as part of every developer’s engineering process. Spirent has decades of experience in providing test equipment and services to engineers working to understand and mitigate jamming threats. We have seen increased investment by designers and integrators of PNT systems that are driven to provide robust/resilient solutions to their customers.”
“While some receivers already incorporate jamming protection (e.g., CW excision), more sophisticated methods (for example, against broad-band jamming and spoofing) should be incorporated into perspective products. The percentage of R&D budget depends on a line of business. For manufactures pursuing applications such as military and critical infrastructure, the number can be as high as 50 percent. For many civilian applications a potential impact of jamming is less damaging. Yet, from 10 percent to 20 percent should be still allocated.”
Sensonor AS is partnering with NASA to supply current and future low- and near-Earth orbit space missions with inertial and gyroscope modules.
The Norway-based company first began supplying its standard inertial measurement unit (IMU) and gyroscope modules for low Earth orbit (LEO) space applications in 2012, beginning with the launch of the NASA-sponsored AeroCube-4 satellite. Sensonor’s STIM300 and STIM210 inertial products are now a standard part in many spacecraft similar to the AeroCube-4.
Current NASA projects using STIM inertial systems include the Raven technology demonstration and Near Earth Asteroid (NEA) Scout.
Raven, which launches to the International Space Station in September, will test key elements of an autonomous relative navigation system. Its technologies may one day help future robotic spacecraft autonomously and seamlessly rendezvous with other objects in motion, such as a satellite in need of fuel or a tumbling asteroid.
The concept image above shows the NEA Scout CubeSat with its solar sail deployed as it characterizes a near-Earth asteroid. (NASA)
The NEA Scout is a robotic reconnaissance mission that will be deployed to fly by and return data from an asteroid representative of NEAs.
NASA, in conjunction with the Aerospace Corp., spearheaded the use of STIM products in space, and many other commercial launch and satellite companies have since followed NASA’s lead. In fact, more than 30 companies around the world use Sensonor inertial products in various space applications, with several satellites successfully flying with STIM gyroscope modules for over three years.
The STIM gyroscope modules are often used in combination with GPS or a Star Tracker and Kalman Filter to orient and stabilize the satellite, as well as to provide feedback on satellite motion induced by its reaction wheels. In some applications, the gyroscopes are used to stabilize satellite- to-satellite communications.
Being a supplier illustrates the trust NASA and others place in Sensonor, further solidifying the company’s role in this market. “We look forward to continuing to serve the international space community with our inertial offerings as standard commercial off-the-shelf (COTS) products. By serving the space market on equal terms with our other customers, we can help to reduce the cost of manufacturing and launching space payloads,” said Hans-Richard Petersen, Sensonor’s vice president of sales and marketing. “Our STIM products are the lowest size, weight, and power for their performance level in the market, with 5 to 10 times lower weight than the next-best alternative with similar performance. This makes them a very cost-effective and attractive solution.”
Sensonor will continue to improve its gyroscope module and IMU product performance and features, and is actively working with the space community to enhance its standard commercial-off-the-shelf (COTS) parts. Following the tremendous interest from the space community, Sensonor has initiated a space-optimized version of its STIM gyro module.
A four-satellite dispenser for Galileo’s Ariane 5 is shown during shaker testing at Airbus Defence and Space near Bordeaux, France. The dispenser has had four Galileo engineering models attached to it for test purposes. (Photo: ESA)
In Geospatial Solutions’ sister publication, GPS World magazine, I’ve written quite a bit about how high-precision GNSS is going to significantly improve over the next few years.
Most GNSS users have receivers capable of using GPS (31 satellites) and Glonass (about 24 satellites). That generally equates to between 13 and 20 satellites in view with a clear sky and average terrain. However, add in variable terrain, some trees and perhaps a nearby building or two, and it can be a challenge to find enough solid satellites to track to obtain a high-precision GNSS position (less than a meter).
As the demand for high-precision GNSS positioning continues to grow, users are going to want to work in increasingly more difficult environments where high-precision GNSS struggles. More satellites will help, but they won’t come from GPS, nor GLONASS.
The GPS constellation is currently full, and is not going to grow any larger than 31 satellites (due to limitation in current GPS ground control software) in the foreseeable future. Even if GPS could fly more satellites, the orbit design accommodates only 27 satellites. GLONASS appears happy at 24 satellites and is not expanding anytime soon.
The answer lies in Europe, with China following.
After two decades of start, stop, restart, retool, regroup and start again, Europe’s Galileo constellation is real — very real. It’s all fun and games until Galileo starts launching four satellites at a time, which it is scheduled to start doing in a couple of months. Those four new satellites, added to the 12 in orbit (plus two in odd orbits), should be enough for Galileo to begin initial operation in Q4 of this year. Then, each new launch of four additional Galileo satellites will only improve the reliability and robustness of high-precision positioning. That’s a big deal for high-precision GNSS users.
Get ready for another jump in performance in high-precision GNSS positioning.
Do you remember the value that GLONASS added to GPS-only receivers 10-plus years ago? It was a premium feature on high-precision GNSS receivers in those days. Now, GLONASS is a standard feature on your smartphone.
Not very long from now, we’ll be making similar comments about Galileo. Satellite positioning in general, and high-precision GNSS positioning specifically, are satellite-hungry. As high-precision GNSS technology continues to embed itself deeper into a wide variety of industries, users will expect the technology to work. Some of those expectations, maybe many expectations, will be unreasonable. In dense urban environments? Under heavy tree canopy? In rugged terrain?
Unreasonable expectations are O.K. — that’s what pushes GNSS product managers and GNSS engineers to think outside of the box. More satellites will help meet some of the unreasonable user expectations.
What’s even better is that China’s global BeiDou system isn’t far behind Galileo. China’s regional BeiDou system (16 satellites in regional orbits over China) already makes China the best place in the world for high-precision GNSS positioning. Like Galileo, China’s global constellation is said to consist of 30 satellites.
That means in the not-too-distant future (about 2018 for Galileo and 2020 for BeiDou):
31 x GPS
24 x GLONASS
30 x Galileo 30 x BeiDou Total: 115
This translates into more than double the satellites in view that we have at this point in time. But, you don’t have to wait. Galileo satellites are usable this year if your receiver has been designed to use them. With each new Galileo launch, you’ll have access to four more satellites until the constellation reaches 30. The same goes for BeiDou.
Don’t take this wrong, GPS isn’t done. Not by a long shot. However, historically speaking, at one satellite per rocket launch, it’s only averaging about one launch every six months. To complicate things, the U.S. Air Force has launched all of the current GPS model (IIF) satellites and aren’t ready to launch GPS III satellites yet. See Don Jewell’s August column in GPS World magazine for details.
The good news is that the user community doesn’t have to rely on an expanded GPS constellation to improve performance any more than the “gold standard” it has become. The difference-makers are going to be Galileo beginning this year and BeiDou beginning in 2018. So, get ready folks, and fasten your seatbelt. The next generation of GNSS is about ready to begin, and your geodatabase is about ready to get a double-shot of Vitamin B.
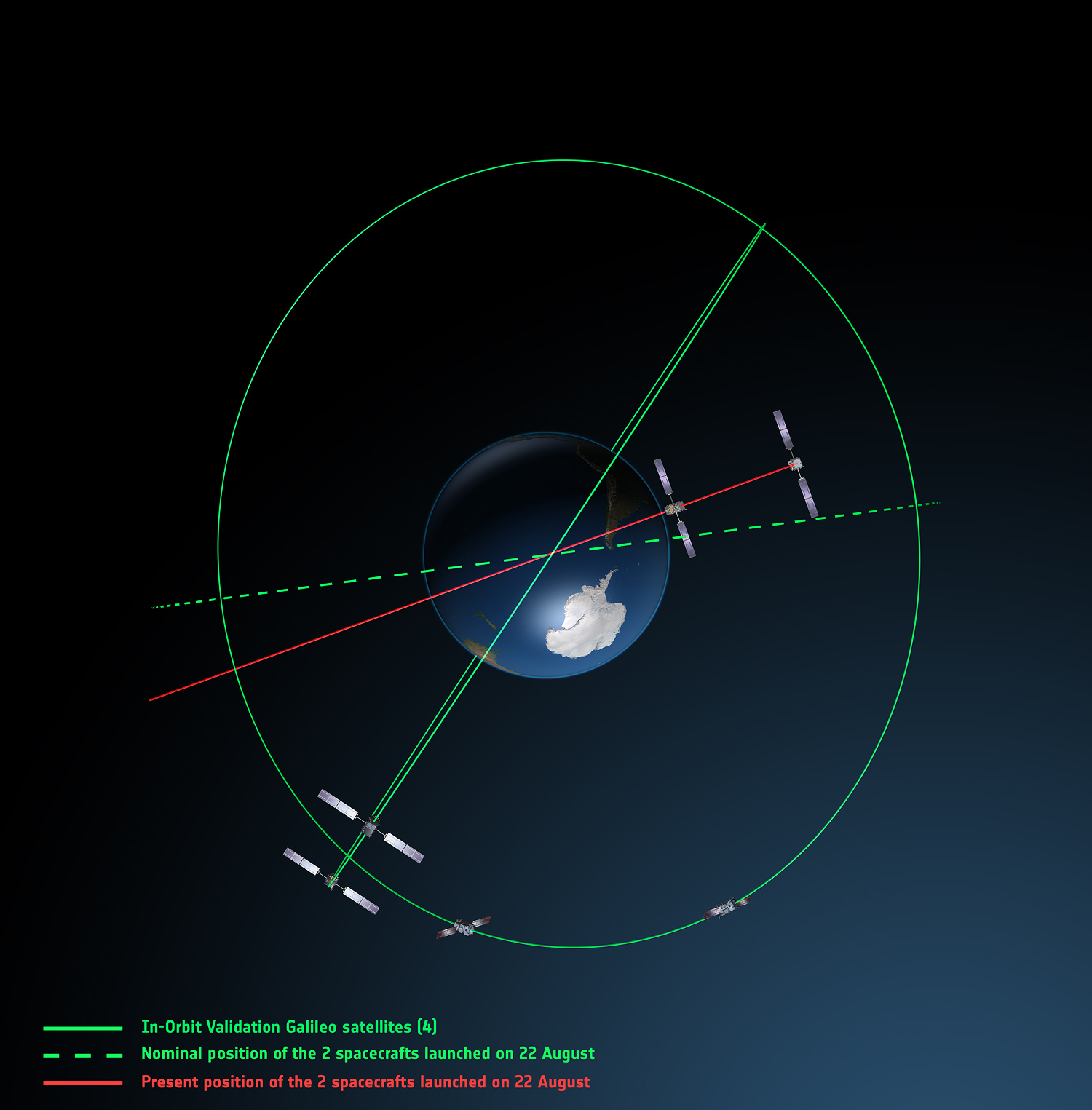
Europe’s fifth and sixth Galileo satellites, salvaged from their faulty 2014 Soyuz launch, will begin broadcasting working navigation signals for test purposes, for the benefit of receiver manufacturers, service providers and scientific researchers. The European Commission will decide later whether the two satellites will become part of the operational Galileo constellation.
The European Space Agency performed a complex series of in-orbit maneuvers to raise and circularize the two after they arrived in space too low and too elliptical for full Galileo use. Their initial orbits dipped the satellites too close to Earth to keep their antennas properly locked on the planet.
“Once their orbits were modified, their navigation payloads could be turned on and in-orbit testing could take place,” explained Marco Falcone, head of the Galileo System Office. “The good news was their performance was excellent.
“The navigation signals will include a signal health status reading that ‘signal component currently in test’ and its navigation data validity status will be ‘working without guarantee.’ In this way, these signals will not disturb the performance of any receivers using the Galileo signals coming from the other satellites. On the user community side, some application providers are interested in harnessing as many available satellites as possible for precision applications.”
Testing will take place in two phases: initially their navigation signal will be updated via the Galileo ground segment every 14 hours or so. Later this year, the ground segment will be reconfigured to send updates more often, enhancing navigation precision, although they will remain outside the official constellation until decided otherwise.
The two satellites are also midway through an ambitious space experiment to test Einstein’s General Theory of Relativity more precisely than ever before, by measuring how their onboard time varies in accordance with their altitude and therefore gravity, known as their gravitational redshift.
New Activation. Galileo GSAT-0210 (PRN E01), one of two launched May 24, began dual-frequency broadcast on Aug. 17, transmitting E1 and E5a signals.
GPS III launch RFP
Competitive bids invited
The U.S. Air Force released a Request for Proposal (RFP) in August for GPS III-3 launch services, scheduled to begin in 2019. The contract will be a standalone for a single GPS III launch.The United Launch Alliance (ULA) and Space Exploration Technologies (SpaceX) are expected to compete for the contract. In April, SpaceX was chosen to launch the GPS III-2 satellite in May 2018. ULA chose not to compete.
The RFP seeks an Evolved Expendable Launch Vehicle (EELV) Launch Service. The Air Force’s acquisition strategy seeks a balance between mission success/operational needs and lowering launch costs, reintroducing competition for national security space missions.
This is the second competitive launch service solicitation under the current procurement strategy. Previously, ULA was the only certified launch provider. In 2013, ULA was awarded a sole-source contract for launch services as part of an Air Force Block Buy of 36 rocket cores. In May 2015, SpaceX was certified for EELV launches, yielding two qualified launch service providers.
M-code, OCX updates
The Air Force awarded a $52.6 million contract to Raytheon for modernization of the Miniature Airborne GPS receiver 2000 (MAGR-2K): test and delivery of an M-code automatic dependent surveillance and broadcast-capable system. Congress has mandated the military buy only M-code GPS equipment by 2018. Last year, Rockwell Collins received a $36.6 million contract for such equipment.
OCX. Raytheon is implementing changes to its GPS Next-Generation Operational Control System (OCX). “Momentum is very good” towards a December 2020 deadline for software delivery, said the program manager. A Pentagon review in July followed breach of a critical cost-growth cap. The complexity of cyber security requirements contributed to delays to date. The company expects to deliver Block 0 software in 2017, in conjunction with plans to launch GPS III satellites. However, the capability will not be turned on until 2018, when an OCX Block 0 launch-and-checkout capability for GPS III launches is to begin.
Ingrid Daubechies, a prominent mathematician whose pioneering work on wavelets is the foundation for various consumer products and GNSS applications, has received a $1.5 million grant from the Simons Foundation.
Mathematician Ingrid Daubechies, whose pioneering work enabled use of wavelet analysis in a variety of fields, including GNSS. (Image: Duke Today)
Daubechies is the James B. Duke Professor of Mathematics and Electrical and Computer Engineering at Duke University in Durham, North Carolina.
The Math + X Investigator award provides research funds to professors at American and Canadian universities to encourage novel collaborations between mathematicians and researchers in another field of science or engineering.
Wavelets in GNSS. “The mathematical technique of wavelet analysis is being used in several different GNSS applications,” said GPS World’s Innovation columnist Richard Langley. In the October 2003 Innovation article “Wavelet Multiresolution Analysis,” Langley provides a general introduction to wavelet techniques:
“Wavelet analysis is an extension of Fourier analysis, the classical technique that decomposes a signal into its frequency components. However, Fourier analysis cannot determine the exact time at which a particular frequency occurred in the signal.
“Wavelet analysis, on the other hand, allows scientists and engineers to study the frequency structure of time-varying signals with unprecedented time resolution.
“In fact, a signal can be decomposed to obtain a time history of the different frequency bands making up the signal — an approach termed multiresolution analysis. Wavelet analysis can also compress data for more efficient storage and transmission, replacing the original data values with far fewer wavelet transform coefficients.”
Langley explains that to improve GPS accuracy, wavelet analysis is used to “de-noise” GPS pseudorange measurements, detect and eliminate cycle slips in GPS carrier-phase measurements, and separate biases such as multipath from high-frequency receiver noise.
Daubechies and Dinosaurs. “This is a tremendous honor,” Daubechies told Duke Today. She joined Duke’s faculty in 2011. “Thanks to these funds, I will be able to explore new ways to apply ideas from machine learning to adaptive signal analysis and to biological morphology.” For example, she will work with scientists to identify ways to measure fossilized teeth and bones in an effort to map evolutionary changes.
Born in Houthalen, Belgium, Daubechies studied physics at the Vrije Universiteit in Brussels, completing a doctorate in theoretical physics in 1980. She conducted research at AT&T Bell Laboratories in New Jersey before joining Princeton University’s faculty in 1993, eventually becoming the first woman to be a tenured professor in mathematics.
In 2000, she was the first woman to receive the National Academy of Sciences Award in Mathematics. A decade later, she was the first woman elected president of the International Mathematical Union. She is a 1992 MacArthur Fellow, a 2010 Guggenheim Fellow and has been elected into the National Academy of Sciences and the National Academy of Engineering.
French Space Agency CNES has signed a cooperation agreement with the company Geoflex, granting it the right to spin off software developed by CNES that employs satellite precise point positioning (PPP) technology.
Under the agreement, CNES is granting Geoflex a license to use its patented technologies in this field with a view to offering a global commercial operational service. This partnership ties in with the agency’s strategy of spinning off its research and development results.
The agreement was signed June 28 at the Toulouse Space Show by Lionel Suchet, CNES’s director of innovation, applications and science, and Romain Legros, chairman of Geoflex.
The Geoflex team was able to draw on more than 10 years’ experience in GNSS precise positioning when they founded their start-up to pursue this project. Through this cooperation agreement with CNES, Geoflex is set to benefit from significant opportunities worldwide in real-time precise positioning, navigation and timing, serving a broad customer base employing applications such as topographic mapping, construction and civil engineering, agriculture, shipping, rail, driverless vehicles and unmanned aerial systems.
“Today’s space technologies will drive revolutionary changes in usage in the future,” Suchet said after signing the agreement. “Through their commitment to developing a global GNSS precise positioning service, CNES and Geoflex are showing that France has a key role to play in innovating and in growing our future economy. The people at this start-up are looking to shake up the status quo, so it was natural that CNES should support them.”
Europe’s fifth and sixth Galileo satellites, which were salvaged from their faulty launch into working orbits, are set to begin broadcasting working navigation signals for test purposes.
This activation will allow satnav receiver manufacturers, service providers and scientific researchers to make use of these test signals. A decision on whether these satellites will become part of the operational Galileo constellation is due to be taken by the European Commission
A malfunction in their Soyuz-Fregat upper stage during their Aug. 22, 2014, launch placed Galileos 5 and 6 into highly elliptical — or elongated orbits — instead of their planned circular medium-Earth orbits.
A team based at ESA’s ESOC control centre in Darmstadt, Germany, then performed a complex series of maneuvers to raise and circularize their orbits.
The satellites lacked sufficient fuel to reach their originally envisaged orbits, but the salvage meant that their navigation payloads could then be operated on an ongoing basis; their initial orbits dipped the satellites too close to Earth to keep their antennas properly locked on the planet.
“Once their orbits were modified, their navigation payloads could be turned on and in-orbit testing could take place,” explains Marco Falcone, Head of the Galileo System Office “The good news was their performance was excellent.
“Now they will be tested on a more sustained basis, along with the rest of the Galileo satellites. A pair of ‘Notice Advisory to Galileo Users’ (NAGUs) informing the user community of their availability for testing purposes have been published on the European Global Navigation Satellite System Service Centre website. Users are welcome to provide feedback on their usage of GSAT0201 and GSAT0202 by contacting the GSC helpdesk.
“On our side, switching on their navigation signals allows us to evaluate the entire spectrum of performance of the satellites on an end-to-end basis.
“The navigation signals will include a signal health status reading that ‘signal component currently in test’ and its navigation data validity status will be ‘working without guarantee’. In this way, these signals will not disturb the performance of any receivers using the Galileo signals coming from the other satellites.
“On the user community side, some application providers are interested in harnessing as many available satellites as possible for precision applications.”
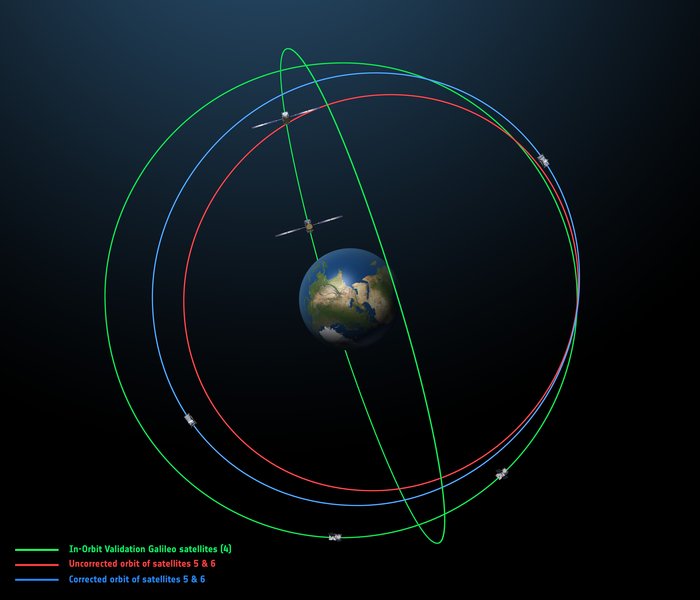
The original (in red) and corrected (in blue) orbits of the fifth and sixth Galileo satellites, along with that of the first four satellites (green).
Because these satellites are not placed in nominal Galileo orbits, the orbital almanacs included in Galileo’s navigation signal will leave out their orbital positions, making Galileos 5 and 6 harder for receivers to locate — although the GSA website will give acquisition details.
Their testing will take place in two phases: initially their navigation signal will be updated via the Galileo ground segment every 14 hours or so. Later on this year, the ground segment will be reconfigured to upgrade the update frequency more often, greatly enhancing their navigation precision — although they will remain outside the official Galileo constellation until decided otherwise.
The two satellites have not been idle since their in-orbit testing was completed. Instead, they are midway through an ambitious space experiment to test Einstein’s General Theory of Relativity more precisely than ever before, by measuring how their onboard time varies in accordance with their altitude and therefore gravity, known as their gravitational redshift.
This experiment uses only the carrier wave of the signals, so will be unaffected by the transmission of navigation messages by satellites 5 and 6.
It was not a big wager as wagers go, at least not in monetary value, but the underlying premise of the wager spoke volumes. It all began innocently enough in 2005 when the first test, or proof of concept, Galileo satellite known as GIOVE-A was launched.
In March of that year, a group of PNT experts made a simple wager that there will be:
10 or fewer operational Galileo satellites by 12/31/15
or
11 or more operational Galileo satellites by 12/31/15
Galileo’s GIOVE-A retired in June 2012.
About 20 PNT experts took the bet, evenly divided on both sides, which essentially said that given that the first test (GIOVE) Galileo satellites were launched in 2005 and 2008 respectively, surely there would be at least 10 operational satellites on orbit or about one per year by 2015.
The stakes were modest, but as I said, the import of the faith (or lack of faith) in the European Union and its ability and understanding of the difficulties involved in the Galileo endeavor spoke volumes. As the chief scientist at Air Force Space Command stated at the time, “This is rocket science; this is hard.”
Chutzpah and/or naïveté
But the Europeans refused to believe it was a very hard problem. Indeed, after the second GIOVE launch, GIOVE-B in 2008, the European ministers announced, with incredible chutzpah and/or naïveté, that the Galileo constellation would be fully operational (24 fully operational on-orbit satellites) by 2013.
Of course, nothing of the sort has happened. Following the in-orbit validation (IOV) satellites, the first operational satellite launch did not occur until October 2011, almost six years later.
As of May 2016, there were 12 operational Galileo satellites on orbit along with two in early orbit or checkout stages — a far cry from the predicted 24 operational satellites. This is not a criticism of the Galileo system; rather, a validation of those who took the pessimistic side of the wager and of the chief scientist who clearly stated the obvious: this is indeed, as a popular euphemism states, a DARPA hard problem.
So the Europeans have been going about this PNT business since the initial decision to proceed in 2003 — 13 years. The United States has been producing and launching GPS satellites continuously since the first test launch of a NAVSTAR satellite in 1977 (39 years), with a continuously fully operational system (FOC) since 1995 (21 years), and guess what? It is still a hard problem. No one denies that. Which brings us to GPS III.
GPS III Update
Since the United States — specifically the United States Air Force (USAF) — has been in the space-borne PNT business longer than any other nation, you would think we would have this down by now. But it is still a hard problem with, fortunately, a long string of successes and very few (only two) failures.
To date, the U.S. government has launched a total of 72 GPS satellites. There are 31 active operational GPS SVs (satellite vehicles) on orbit, with seven additional in residual or test status; 32 have been retired into a parking orbit where they will not interfere with the operational constellation. That equates to 1.85 GPS satellites launched per year on average, or one every 6.5 months — an enviable record, failures and all.
Plus, there are GPS IIA satellites still on orbit that have been there for more than 22 years. Not bad for a satellite built to last (contracted service life) for 7.5 years.
Amazingly, the payloads on every GPS satellite to date were built, in part, in partnership with or completely by one company, now known as Harris, nee Exelis, nee ITT. Of course, the complexity of the payloads being built by Harris for the GPS III satellites is a far cry from the payloads built in 1975 for launch in 1977. According to GPS III program manager and VP Mark Stewart and his cohorts at Lockheed Martin (LMCO), the aerospace company building the GPS III satellites, GPS III
“…will deliver three times better accuracy, provide up to eight times improved anti-jamming capabilities and extend spacecraft life to 15 years [ed. contracted life], 25 percent longer than the [ed. latest family of satellites on orbit today]. GPS III’s new L1C civil signal … will make it the first GPS satellite to be interoperable with other international global navigation satellite systems.”
While many of you may look upon that LMCO statement as marketing hype, in fact it is a rather incredible prophesy. To a PNT expert it translates to: almost all GPS users globally will have sub-meter level positional accuracy from a group of signals that will rarely if ever be completely jammed, from an SV with a projected lifetime of 30 years that has more signals and greater signal strength, flexibility and interoperability than ever before. By the numbers GPS is still, far and away, the world’s gold standard.
So exactly where are we in relation to a launch of the first evolutionary GPS III satellite? After all, the last IIF launch, number 12 in the series, built by Boeing, occurred in February, so by the law of averages we should have the first GPS III launch later this month. That is not going to happen, but then what is a few months among friends when iterated over 39 years?
Currently the first GPS III launch date, according to the USAF, is scheduled for May 2017. All indications are the government is on track to meet that date with, interestingly enough, the availability of a suitable launch vehicle being the LIMFAC (limiting factor), not the availability of an GPS III SV to launch.
SV 01 in testing at Lockheed Martin’s Denver facility. (Photo: LMCO)
According to my sources, GPS III SV-01 is fully integrated, has completed all environmental testing and is essentially ready to ship to Cape Canaveral,. It would be available for launch (AFL) sometime before the end of the calendar year if there were a launch vehicle, a ground control system and range availability.
GPS III SV-02 will undergo full integration (“core-mating”) completion sometime this fall and — following successful completion of its environmental tests — should certainly be AFL in 2017.
The complete navigation panel (from Harris) for GPS III SV-03 should arrive in the LMCO Denver facility early next year. Providing the vehicle stays on track through testing, it should be AFL in 2018.
The government has yet to complete the contract award process for GPS III vehicles SV-09 and SV-10 to LMCO, but I am assured the award is imminent.
My sources confirm that Harris is continuing to pump money, expertise and technology into the GPS III payload development process, a manufacturing tour de force, and the company should be back on schedule early next year.
As for OCX, the future GPS Ground Control Segment, that is another tale for another time. For all other GPS III segments, all in all it is a positive message for development and deployment. Which is an admirable feat — after all, it is rocket science!
By the way, the Galileo wager is open to interpretation. There were certainly more than 10 Galileo platforms on orbit on the last day of December 2015, but only nine of them were operational at the time. Both sides are claiming victory. What a surprise!
A product to save your hearing
The EB15LE with Hearing Defenders with accessories. (Photo: ERI)
Before I close, I want to mention a product I have tested as extensively as I can in a limited environment. I agreed to test this non-GPS product because of all the emails and letters I receive concerning tinnitus and how it negatively affects our warfighters. Several emails make clear the necessity and criticality of a good sight picture or display for GPS guidance, especially where exfiltration is concerned.
When warfighters or law enforcement officers are suffering the ill effects of extremely loud noises, it is often disorienting. Much like the effects of a flash-bang device, a victim can lose his bearings and needs to have a clear visual of how to exit the threat environment.
The best solution would be not to suffer the devastating effects of the loud noises in the first place. This is where a company named Etymotic Research Incorporated (ERI) comes into play. ERI has developed electronic hearing protection for law enforcement officers and military users.
The version I tested was designated the EB15 for law enforcement. It functioned well as electronic hearing protection and amplification where needed. The device is essentially an electronic hearing aid that amplifies natural or quiet sounds up to five times, and a hearing defender that electronically blocks loud, harmful sounds by up to 25 decibels.
While I was not able to test the hearing defenders in actual combat, the testing I did perform demonstrated that the EB15-LE is an impressive product with a plethora of earplugs for various noisy environments that may help save a user’s hearing. Our warfighters and law-enforcement officers deserve the best technology available, especially if it helps them retain their orientation in a dangerous environment and saves their hearing.
Until next time, happy navigating, and remember: GPS is brought to you free of charge courtesy of the USAF.
A: Solving for jamming, intentional or unintentional, in the design of any GNSS technology platform is no longer an option. How much any one company spends is largely a function of how much is spent on engineering overall and of how much has already been invested upfront on jamming mitigation. The required level of jamming resistance of any PNT solution also depends very much on the particular application, which in turn influences the budget allocated.
A: GNSS jamming is a growing concern, and an assessment of risks and an element of testing against the most applicable real world threats should be included as part of every developer’s engineering process. Spirent has decades of experience in providing test equipment and services to engineers working to understand and mitigate jamming threats. We have seen increased investment by designers and integrators of PNT systems that are driven to provide robust/resilient solutions to their customers.
A: While some receivers already incorporate jamming protection (e.g., CW excision), more sophisticated methods (for example, against broad-band jamming and spoofing) should be incorporated into perspective products. The percentage of R&D budget depends on a line of business. For manufactures pursuing applications such as military and critical infrastructure, the number can be as high as 50 percent. For many civilian applications a potential impact of jamming is less damaging. Yet, from 10 percent to 20 percent should be still allocated.
The Air Force has released a Request for Proposal (RFP) for launch services for the GPS III-3 mission, scheduled to launch in 2019. Proposals are due Sept. 19; the contract will be a standalone contract for a single GPS III launch.
The United Launch Alliance (ULA) and SpaceX are expected to compete for the contract. In April, SpaceX was chosen to launch the GPS III-2 satellite in May 2018. ULA chose not to compete.
The RFP seeks an Evolved Expendable Launch Vehicle (EELV) Launch Service. The draft RFP was released on June 14 to obtain industry feedback to inform the Final RFP. After extensive industry engagements, the Final RFP was released on Aug. 3 with proposals due back to the Air Force no later than Sept. 19 in accordance with the solicitation instructions.
After evaluating proposals through a competitive, best-value source selection process, the Air Force will award a firm-fixed price contract that will provide the government with a total launch solution including launch vehicle production, mission integration and launch operations for the GPS III-3 satellite.
Artist’s concept of the nextgen GPS III satellite (courtesy of the USAF).
The Air Force’s acquisition strategy for this solicitation achieves a balance between mission success/operational needs, and lowering launch costs, through reintroducing competition for national security space missions, the Air Force said in a press release.
“Launch system certification is a key element (high technical bar) within this solicitation to provide insight into the technical capabilities and rigorous processes that demonstrate a launch vehicle contractor’s ability to design, develop, manufacture, and launch national security space missions and contributes to the overall flight worthiness process,” said Lt. Gen. Samuel Greaves, Space and Missile Systems Center commander and Air Force program executive officer for Space. Prior to contract award, the contracting officer will verify that the Offeror has a certified launch system as part of a responsibility determination resulting in a high technical bar.
“Through this competitive solicitation for GPS III launch services, we hope to continue fostering competition in order to promote innovation and reduce cost to the taxpayer while maintaining our laser focus on mission success,” Greaves said.
GPS III is expected to provide improved anti-jamming capabilities as well as improved accuracy for precision, navigation, and timing. It will incorporate the common L1C signal which is compatible with the European Space Agency’s Galileo global navigation satellite system and compliment current services with the addition of new civil and military signals.
The first GPS III satellite undergoes system-level thermal vacuum testing. (Photo: Lockheed Martin)
This is the second competitive launch service solicitation under the current Phase 1A procurement strategy. The Phase 1A procurement strategy reintroduces competition for national security space launch services. Under the previous Phase 1 strategy, ULA was the only certified launch provider. In 2013, ULA was awarded a sole-source contract for launch services as part of an Air Force “Block Buy” of 36 rocket cores that resulted in significant savings for the government through FY 2017.
In May 2015, Space Exploration Technologies (SpaceX) was certified for EELV launches resulting in two launch service providers that are qualified to design, produce, qualify and deliver a launch capability and provide the mission assurance support required to deliver national security space satellites to orbit.
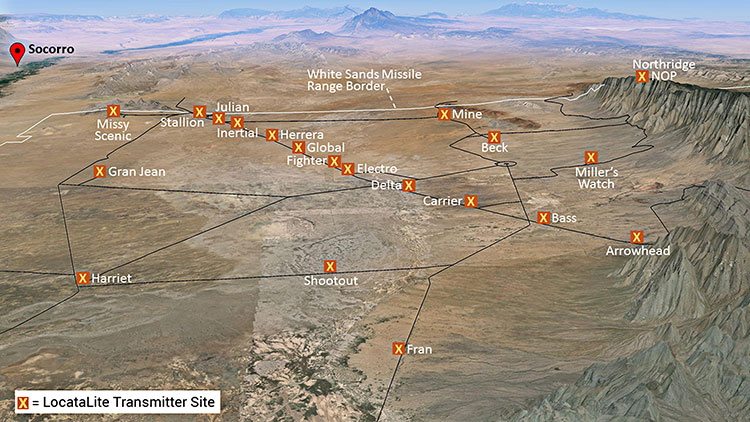
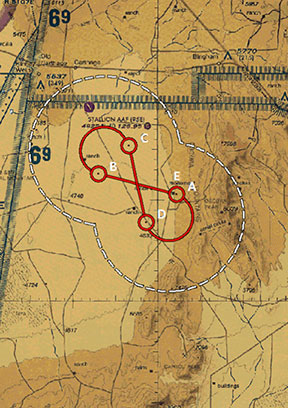
Non-GPS positioning system, White Sands North Range. X = transmitter site. (Photo: U.S. Air force, 746 Test Squadron)
Can’t Deny the Truth: Defeating the Jamming Threat
Initial Operational Capability for the Ultra High-Accuracy Reference System has been declared by the U.S. Air Force. Even when GPS is being completely jammed, UHARS provides extremely accurate positioning, navigation and time — more accurate than GPS — over the large area of White Sands Missile Range in New Mexico.
Amid a growing concern about GPS jamming in military areas of operation, testing GPS receivers and antenna systems in a GPS-denied environment has become increasingly important to Department of Defense (DoD) agencies. However, since GPS is often the “gold standard” position, navigation and time information that serves as a truth reference during field and flight testing, conducting tests in an area that has no GPS availability because of intense jamming makes it difficult to compare observed position and navigation data to a valid truth source. Moreover, to evaluate system performance with appropriate statistical significance, the reference system against which test results are measured needs to be significantly more accurate than the system under test. Therefore, when the system under test is GPS itself, this poses an interesting problem.
FIGURE 1: CIGTF Reference System (CRS) (Photo: U.S. Air force, 746 Test Squadron)
For more than a decade, the 746th Test Squadron (746 TS), also known as the Central Inertial and GPS Test Facility (CIGTF), has met this requirement by employing its CIGTF Reference System (CRS). The CRS (Figure 1) is a system of navigation sensors that evaluates combinations of its subsystem measurements in an extended Kalman filter/smoother algorithm to produce an optimal reference trajectory. Delivering sub-meter accuracy in non-GPS-jammed environments and meter-level accuracy in GPS-jammed environments, the CRS is arguably the most accurate reference system in the DoD. However, many future DoD weapons systems are projected to require tighter navigation accuracies in GPS-denied environments, and as these requirements improve, the reference system against which they are evaluated must improve accordingly. To meet these test and evaluation reference requirements in a GPS-denied environment, a new reference system is needed.
The 746 TS embarked on the development of the Ultra High Accuracy Reference System (UHARS), a next generation reference system that meets test and evaluation reference requirements for future navigation and guidance systems. UHARS consists of a rack-mounted, tightly integrated system of improved navigation sensors/subsystems, data acquisition system (DAS) and a new post-mission reference trajectory algorithm. The complete system will provide a significantly more accurate reference solution for future airborne and land-based test vehicles in navigation warfare environments where modernized and legacy GPS signals are jammed from friendly or hostile systems.
Non-GPS Based. Achieving these accurate reference solutions requires a Non-GPS Based Positioning System (NGBPS) subsystem capable of operating and providing sub-meter position accuracy in a GPS-denied (jamming) environment. The NGBPS portion of the UHARS program employs a network of ground-based LocataLite transceivers and test vehicle receivers (also called rovers). Although the NGBPS uses standard commercial LocataLites and rovers, meeting the demanding UHARS accuracy and distance requirements of better than 18 centimeters accuracy over a 30-mile range in a flight configuration necessitated some additional testing and development of transmit antennas, external signal amplification, navigational software for flight dynamics, as well as the addition of a centralized command and control (C2) capability so the network could be remotely controlled, across the range, from the 746 TS building at Holloman Air Force Base.
Background
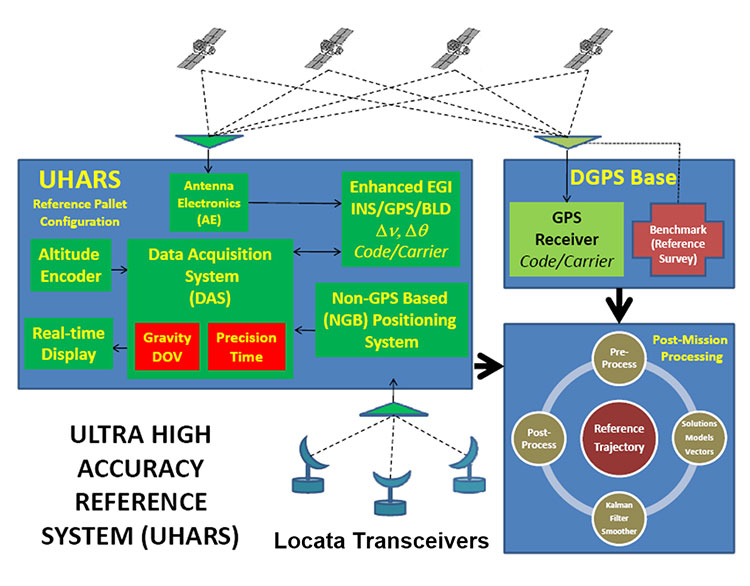
FIGURE 2: UHARS architecture. (Photo: U.S. Air force, 746 Test Squadron)
The UHARS architecture (Figure 2) is comprised of three major subsystems which include the Enhanced Embedded GPS/INS (EGI), Locata NGBPS and GPS Antenna with Antenna Electronics (AE). Other key technologies include the DAS, Differential GPS (DGPS) Base Station and Reference Trajectory Algorithm.
The NGBPS rover collects 10.23 MHz chipped code pseudorange and carrier-phase measurements at selectable rates of 1, 5 and 10 Hz. The system uses a patented timing process which tightly synchronizes all LocataLites in the network. With this done, data from the Locata test bed receiver can be processed exactly like survey-grade GPS measurements, but without the need for differential corrections.
Each LocataLite transmits on two spatially diverse signals from two separate antennas at two frequencies within the 2.4-GHz industrial, scientific and medical (ISM) frequency band, 2434.740 MHz and 2462.361 MHz, for a total of four spatially and frequency diverse signals. That signal structure provides precise positioning signals that are both resistant to GPS L1 and L2 jamming and also provide highly accurate positioning.
Overview
FIGURE 3: Locata solar aluminum transportable trailer (LSATT). (Photo: U.S. Air force, 746 Test Squadron)
The deployed system includes 16 Locata Solar Aluminum Transportable Trailers (LSATT) with flexible power options that integrate both shore power (110V AC) and reusable solar power (Figure 3). The trailer configuration enables easy transportation of major NGBPS components on and off WSMR, allowing for easy reconfiguration of the network or deployment to other test ranges if required.
The NGBPS design currently includes 20 geographically separated deployment sites, 16 of which are populated with LocataLites, over a 20 x 20 mile area on WSMR North Range (see opening figure). This configuration can be scaled to cover an even larger area when required.
FIGURE 4. NGBPS transmitter site. (Photo: U.S. Air force, 746 Test Squadron)
Each site contains permanent monumentation for the two spatially diverse transmit antennas (two monuments per site; 40 total). Figure 4 shows a typical monument site which is equipped with a quadrifilar helix S-band transmit antenna, and one monument also supports the 2.4-GHz receive dish antenna. The monuments and antennas are integrated with an LSATT, UHF-band (350-360 MHz) wireless architecture for the command and control element, and a meteorological (MET) station made by Vaisala. The MET station measures and collects temperature, pressure and relative humidity data,for calculating tropospheric corrections which are then transmitted as part of the positioning signal generated by a LocataLite for use across the network.
FIGURE 5: NGBPS C2 repeater station. (Photo: U.S. Air force, 746 Test Squadron)
The system is operated, controlled and monitored using either the fixed C2 center located at the 746 TS, Holloman AFB, NM or the mobile C2 Center. The mobile C2 is typically located on the WSMR-North Range to support test events. Two repeater stations (Figure 5) are installed at WSMR-North Range to enable long distance remote/wireless C2 communications with the NGBPS network.
Site Architecture
The LSATT includes integrated hardware and software to produce the NGBPS network. The heart of the NGBPS is the LocataLite transceiver, which provides the ranging signals used by the rover to compute position and time information. The same signals are used by each LocataLite for nanosecond-level synchronization across the network. The MET station, mounted on monumentation along with a transmit antenna, collects temperature, pressure and relative humidity data and relays it to the LocataLite for inclusion in the transmitted navigation signal. The LocataLite provides the exciter signal to two Mini-Circuits amplifiers which boost the RF power to around 10 watts for each transmit antenna, providing signal coverage over the large geographical area of WSMR-North Range. The wireless modem relays Locata and MET data to and from the C2 centers using various package compression techniques to ensure data are not lost during transmission. The modem provides 4 watts of power operating in the UHF-Band with a directional high gain antenna.
Situated in the New Mexico desert, the LSATT is also required to operate during extreme weather conditions, necessitating the employment of water-tight containers and temperature reducing mechanisms to protect its commercial subsystems. Accordingly, a filtered fan configuration mitigates elevated temperatures during operation.
Each LSATT also possesses an intelligent low power controller that supports the various communication protocols within the equipment enclosure. A comprehensive and expandable feature of the controller design enables a centralized methodology for data collection, health and status information and C2 functions. The controller interfaces with the LocataLite transceiver, MET station, amplifiers, and power supply sources. Information is collected and packetized for efficient transmission via the wireless modem. Commands from the fixed or mobile C2 center are received and implemented by the controller. During non-operating periods, the controller reduces power consumption by shutting down non-essential equipment. Likewise, the controller itself enters a stand-by mode until reactivated by the C2 center via the wireless modem. The controller provides a redundant data archive capability and autonomously manages operations in the unlikely event of a wireless communication outage with the C2 Centers. The controller is programmed to shut down after a definable period if C2 communication links cannot be re-established.
The NGBPS design provides pre-, live- and post-mission support through remote wireless C2 operations. This support includes real-time status monitoring and a net-centric architecture for C2 of remote locations. As C2 outages are detected, the wireless network autonomously attempts to self-repair and return the network to an operational state.
Verification and Validation
FIGURE 6: A typical NGBPS clear air flight profile. (Photo: U.S. Air force, 746 Test Squadron)
After all network and C2 software activities had been completed, TMC Design Corporation conducted a Final System Verification (FSV) on the fully fielded NGBPS system on WSMR. The FSV ensured all contractual requirements were adequately met prior to release to the 746 TS for government operations. It included verifying successful communication through the UHF network and ensured that the rover could obtain and process information from each LSATT site in view. Additionally, a mission duration test was performed to ensure the system could operate for the period of a standard mission window without depleting the battery system.
Upon completion of the FSV in September 2014, the 746 TS conducted a series of flight tests to:
Measure the NGBPS PDOP over the WSMR fielded area.
Compare the measured PDOP values to the developed PDOP model.
Evaluate carrier-phase solution with an objective accuracy of
FIGURE 7: USAF C-12J aircraft fitted with Locata antenna. (Photo: U.S. Air force, 746 Test Squadron)
Once the squadron’s PDOP model was verified, flight profiles were carefully devised to stay within the NGBPS PDOP < 3 envelope (Figure 6). However, since the 746 TS also sought to evaluate other UHARS components, both individually and as a system, additional flight profiles were flown. When these flight profiles happened to meet NGBPS PDOP criteria, performance was recorded and analyzed. All flight profiles were flown at varying altitudes, aircraft speed and time of day in order to test the NGBPS network performance under a wide range of scenarios.
Although an operational UHARS will ultimately provide an exceptional reference solution in a GPS-denied environment, GPS signals needed to be available during NGBPS validation in order to evaluate the Locata navigation carrier-phase solution against a Differential GPS carrier-phase solution. Thus, all NGBPS validation testing was conducted in clear, unjammed environments. Now that system performance is verified in this NGBPS configuration, it can be used as the primary source of positioning when the GPS signals are denied.
Flight trials were conducted using the USAF C-12J aircraft (Figure 7) integrated with one quadrifilar helix S-band receive antenna. The NGBPS receiver was integrated in the UHARS flight pallet, and a DAS was connected to the receiver to log specific receiver and health data required for post-test data analysis.
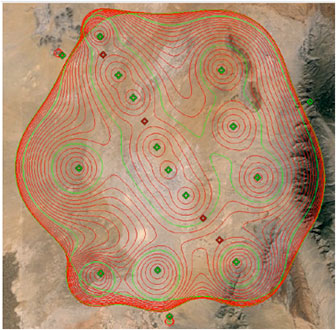
FIGURE 8: NGBPS PDOP plot. (Photo: U.S. Air force, 746 Test Squadron)
Figure 8 illustrates the top-down view of the predicted PDOP=3 boundaries across the NGBPS network on WSMR. The PDOP volume coverage is shown in 1000 ft. increments (red lines) from 5K to 30K ft. MSL. The green lines are at 10K, 20K and 30K ft. The flight profiles were flown within the PDOP volume footprint to obtain carrier-phase solutions.
Results
The 746 TS conducted extensive flight tests where the NGBPS system was tested under operationally realistic conditions. Preliminary test results have proven good enough to declare Initial Operational Capability (IOC) for use by the 746 TS’s many DoD and Government customers. Not only does the network deliver centimeter-level positioning and navigation, but also nanosecond-level synchronization, which may be useful for military applications requiring precise time transfer in GPS-denied environments. Working in concert with other UHARS components, the LocataNet supports a reference solution which outperforms the CRS in GPS-denied environments.
“Initial testing shows that UHARS delivers accurate independent PNT as good as, or better than, the USAF’s current CRS, so it is perfectly able to support current customer requirements,” said Jim Brewer, chief scientist of the 746 TS. “However, more data are required to tune the UHARS filter and optimize its accuracy to meet even tighter PNT requirements, which is our objective. When this is achieved, UHARS will deliver truth accuracy for next-generation military capabilities, and we will declare UHARS at Full Operational Capability.”
“UHARS is a rack-mounted, tightly integrated system of improved navigation sensors, a data acquisition system and a new post-mission Kalman filter, all of which need to work together,” explained John Cao, technical director of the 746 TS. “It’s working very well, but once we completely measure and characterize the individual components and then tune and validate the filter, the complete system will provide a significantly more accurate reference solution for future airborne and land-based test vehicles in navigation warfare environments where modernized and legacy GPS signals are jammed from friendly or hostile systems.”
Summary & Conclusions
As designed, deployed, and validated, this tailored network provides accurate 3D positioning, completely independent of GPS and while traveling in a dynamic aircraft flight profile. This enables the US government to test, evaluate, and assess capabilities in GPS-denied environments.
Based on successful results of the original technical demonstration at WSMR in a real-world end-to-end environment, the USAF proceeded to the NGBPS production and fielding phase in 2012.
The currently installed network infrastructure on WSMR includes 20 permanent monument sites, 16 LSATT trailers installed in select initial site locations, comprehensive C2 software and solar and battery power for all sites. The system is self-contained, remotely operated and possesses high quality, reliability and safe operation attributes. Its NGBPS capability is now core to the UHARS that is replacing the CRS.
Initial testing shows that UHARS delivers accurate independent PNT as good as, or better than, the USAF’s current CRS truth system, and the 746 TS has therefore declared Initial Operational Capability (IOC) for UHARS, making it immediately available to support customers requiring an accurate non-GPS-based solution. Further verification testing will enable the squadron to fine tune the UHARS filter and optimize its accuracy even further to meet even tighter PNT requirements. At that time UHARS Full Operational Capability (FOC) will be declared.
Customers interested in leveraging UHARS into their test programs should contact the 746 TS at (575) 679-2123 or [email protected] for scheduling information.
Manufacturers
LocataLites, Locata rovers and the software/firmware that enables the TimeLoc synchronization technology which creates the LocataNet are manufactured and supplied by Locata Corporation. The S-band transmit antenna was made by Cooper Antennas Ltd.
The 746 TS awarded two separate sole-source contracts for NGBPS. The Locata Corporation was contracted to provide production transceivers and rovers, navigation algorithms required for data analysis and subject matter expertise. The TMC Design Corporation was contracted to develop the hardware to house and field the Locata network, develop the command and control hardware and software, and then physically field the production hardware at WSMR.
KEY NGBPS requirements
After successful completion of the technical demonstration in 2011, in which all of these key technical requirements were demonstrated, the USAF awarded contracts to field the NGBPS.
Carrier-phase “truth-reference” solution of < 18 cm Three Dimensional Root Mean Square (3dRMS), with a Position Dilution of Precision (PDOP) < 3.0.
Rover receivers acquiring and tracking Locata signals at a range greater than 30 miles (48 km).
Accurate and reliable TimeLoc synchronization over the test area, the ability to “cascade” TimeLoc from one LocataLite to another, plus the delivery of nanosecond-level synchronized time on the Range while GPS time is unavailable because of GPS jamming.
External signal amplification to support the extended signal range requirement while still maintaining nanosecond-level TimeLoc integrity.
Rover receiver tracking loops perform adequately under flight dynamics.
Tropospheric measurement and modeling to ameliorate the large tropospheric errors (approximately 300 ppm uncorrected) experienced by terrestrial signals at these ranges.
Transmit and receive antennas that provide both adequate gain and multipath mitigation for an aircraft flight scenario.
According to two Notice Advisories to Galileo Users (NAGUs), the two Galileo satellites launched into elliptical orbits in August 2014, GSAT0201 using PRN code E18 and GSAT0202 using PRN code E14, will start transmitting navigation messages for test purposes this Friday, Aug. 5.
The Signal Health Status (SHS) flags will be set to “Test” and the Data Validity Status (DVS) flags will be set to WWG (working without guarantee).
The satellites will not be included in the broadcast almanacs.