Abstract submissions are now being accepted for the Institute of Navigation’s (ION) GNSS+ 2014, the 27th International Technical Meeting of the Satellite Division. The conference will take place September 8-12, 2014 (Tutorials September 8-9) at the Tampa Convention Center, Tampa, Florida.
The deadline for submitting abstracts is March 7, 2014. Instructions on submitting your abstract can be found on the ION website.
ION GNSS+ 2014 is the world’s largest technical meeting and showcase of GNSS technology, products and services and brings together international leaders in GNSS and related positioning, navigation and timing fields to present new research, introduce new technologies, update current policy, demonstrate products and exchange ideas.
This year’s conference will feature a technical program focused around six technical tracks:
Commercial Track – Manufacturers and industry experts will present the latest innovations in commercial products and services across a range of domains. The introduction of new technology to products will be covered along will the important aspects of simulation and testing.
Application Track – For researchers, manufacturers and end users to present innovative solutions or projects within a wide range of applications.
Innovations Track –The latest scientific innovations which are emerging from scientific research and developing into the products and services we will see coming to the market in the not too distant future. In addition the scientific applications of new GNSS developments and innovations will be covered.
Advanced Multi-sensor Navigation Track – Leading-edge research on multi-sensor solutions to demanding navigation and positioning challenges that GNSS cannot meet on its own. Papers are welcome on novel non-GNSS positioning technologies and their integration, both with GNSS and with each other.
Advanced Algorithms and Methods – Innovative, state-of-the-art algorithms and methods that preserve and improve GNSS PNT performance now and into the next era of multi-GNSS PNT capabilities. Papers are welcome on any algorithm/software approach to improving the robustness of current GNSS performance, as well as developments that integrate signals and measurements from emerging multi-GNSS constellations. Algorithms that address GNSS vulnerability, new and exciting GNSS applications, enhanced receiver functionality, test beds and practical implementations are encouraged.
System Updates and Modernization – Plans, Policies & Government Aspects
NEW THIS YEAR: Abstracts submitted in the Commercial and Applications tracks are eligible for presentations only in the conference proceedings (a full paper is optional but not required).Peer Review Papers – Technical papers submitted under the Advanced Multi-Sensor Navigation and Advanced Algorithms and Methods tracks are available for optional peer review. Manuscripts must be received in proper form by July 15 to be eligible for peer review.
On December 27, 2013, the first anniversary of BeiDou Navigation Satellite System providing full operational regional service was held in Beijing. At the meeting, China Satellite Navigation System Management Office Director Ran Chengqi announced the BeiDou Navigation Satellite System Public Service Performance Standard.
The document details the public service performance parameters of BeiDou system, including service area, accuracy, integrity, continuity, and availability. It is a basic commitment to customers from BeiDou system providers, but also an important basis for customers to choose, use and evaluate the system performance.
Also released is Version 2 of the BeiDou Navigation Satellite System Interface Control Document (ICD) for the Open Service Signal. Among other changes, the new version now includes a description of the B2I signal on 1207.140 MHz.
The publishing of the Public Service Performance Standard is a common practice in the world satellite navigation system suppliers, and also a prerequisite for BeiDou system involvement in international civil aviation, international maritime, 3GPP and other international standard-setting organization activities. Further, it is meaningful for the promotion of international cooperation and application of the BeiDou system in the aviation, maritime and mobile communication areas, according to the China Satellite Navigation System Management Office.
The implementation changes and first live tests of BeiDou and Galileo on Teseo-3 GNSS chips developed in 2013 are covered, bringing it to a four-constellation machine. By 2020, we expect to have four global constellations all on the same band, giving us more than 100 satellites — under clear sky, as many as 30 or 40 simultaneously.
By Philip G. Mattos and Fabio Pisoni
Multi-constellation GNSS first became widely available in 2010/2011, but only as two constellations, GPS+GLONASS. Although receivers at that time may have supported Galileo, there were no usable satellites. BeiDou was a name only, as without a spec (an interface control document, or ICD), no receivers could be built. However, the hardware development time of receivers had been effectively shortened: the Galileo ICD had been available for years, BeiDou codes had been reverse-engineered by Grace Gao and colleagues at Stanford, and at the end of 2011 they were confirmed by the so-called test ICD, which allowed signal testing without yet releasing message characteristics or content.
The last weeks of 2012 saw two great leaps forward for GNSS. Galileo IOV3 and 4 started transmitting at the beginning of December, bringing the constellation to four and making positioning possible for about two hours a day. At the end of December, the Chinese issued the BeiDou ICD, allowing the final steps of message decode and ephemeris calculation to be added to systems that had been tracking BeiDou for many months, and thus supporting positioning. The Teseo-2 receiver from STMicroelectronics has been available for some years, so apart from software development, it was just waiting for Galileo satellites; however, for BeiDou it needed hardware support in the form of an additional RF front end. Additionally, while it could support all four constellations, it could not support BeiDou and GPS/Galileo at the same time, as without the BeiDou ICD the spreading codes had to be software-generated and used from a memory-based code generator, thus blocking the GPS/Galileo part of the machine.
The Teseo-3 receiver appeared late in 2013, returning to the optimum single-chip form factor: RF integrated with digital silicon and flash memory in the same package, enabling simultaneous use of BeiDou and GPS/Galileo signals. Multi-constellation in 2012 was GPS+GLONASS, which brought huge benefits in urban canyons with up to 20 visible satellites in an open sky. Now, for two hours a day in Europe while the Galileo IOVs are visible, we can run three constellations, and in the China region, GPS/BeiDou/Galileo is the preferred choice.
This article covers the first tracking of four Galileo satellites on December 4, 2012, first positioning with Galileo, and first positioning with BeiDou in January 2013. It will cover static and road tests of each constellation individually and together as a single positioning solution. Road tests in the United States/Europe will combine GPS/GLONASS/Galileo, while tests in the China region will combine GPS/Galileo/BeiDou. Results will be discussed from a technical point of view, while the market future of multi-constellation hardware will also be considered.
In the 2010–2020 timeframe, GLONASS and BeiDou (1602 MHz FDMA and 1561 MHz respectively) cost extra silicon in both RF and digital hardware, and cause marginal extra jamming vulnerability due to the 50 MHz bandwidth of the front end. The extra silicon also causes extra power consumption.
After 2020, GLONASS is expected to have the L1OC signal operational, CDMA on the GPS/Galileo frequency, and BeiDou is expected both to have expanded worldwide, and also to have the B3 signal fully operational, again on 1575 MHz. At that point we will have four global constellations all on the same band, giving us more than 100 satellites. With a clear sky, the user might expect to see more than 30, sometimes 40, satellites simultaneously.
Besides the performance benefits in terms of urban canyon availability and accuracy, this allows the receiver to be greatly simplified. While code generators will require great flexibility to generate any of the code families at will, the actual signal path will be greatly simplified: just one path in both RF (analog) and baseband (digital) processing, including all the notch filters, derotation, and so on. And this will greatly reduce the power consumption.
Will the market want to take the benefit in power consumption and silicon area, or will it prefer to reuse those resources by becoming dual-frequency, adding also the lower-L-band signals, initially L5/E5, but possibly also L2/L3/L6 ? The current view is that the consumer receiver will go no further than L5/E5, but that the hooks will be built-in to allow the same silicon to be used in professional receivers also, or in L2C implementations to take advantage of the earlier availability of a full constellation of GPS-L2C rather than GPS-L5.
This article presents both technical results of field trials of the quad-constellation receiver, and also the forward looking view of how receivers will grow through multi-frequency and shrink through the growing signal commonalities over this decade.
History
Galileo was put into the ST GPS/GNSS receiver hardware from 2006 to 2008, with a new RF and an FPGA-based baseband under the EU-funded GR-PosTer project. While a production baseband (Cartesio-plus) followed in high volume from 2009, in real life it was still plain GPS due to the absence of Galileo satellites.
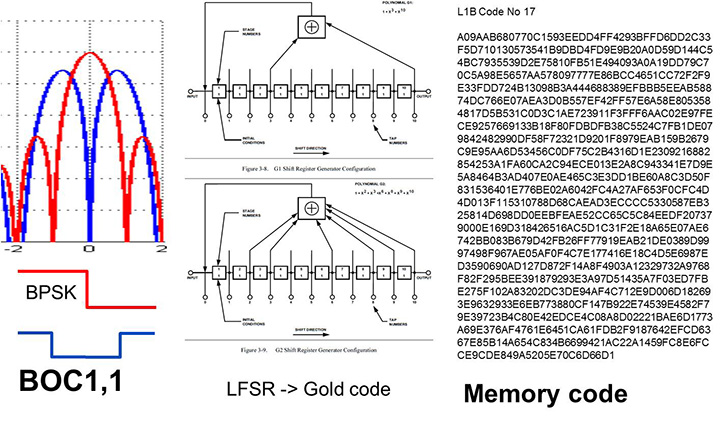
The changed characteristics in Galileo that drove hardware upgrades are shown in Figure 1. The binary offset carrier BOC(1,1) modulation stretches the bandwidth, affecting the RF, while both the BOC and the memory codes affect the baseband silicon in the code-generator area.
Figure 1. Changes for Galileo.
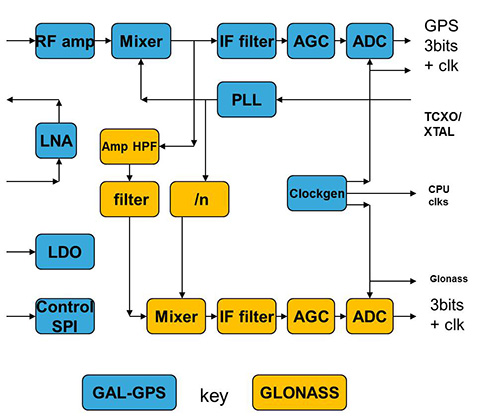
Next was the return to strength of the GLONASS constellation, meaning receivers were actually needed before Galileo. However the different center frequency (1602 MHz), and the multi-channel nature of the FDMA meant more major changes to the hardware. As shown in Figure 2 in orange, a second mixer was added, with second IF path and A/D converter.
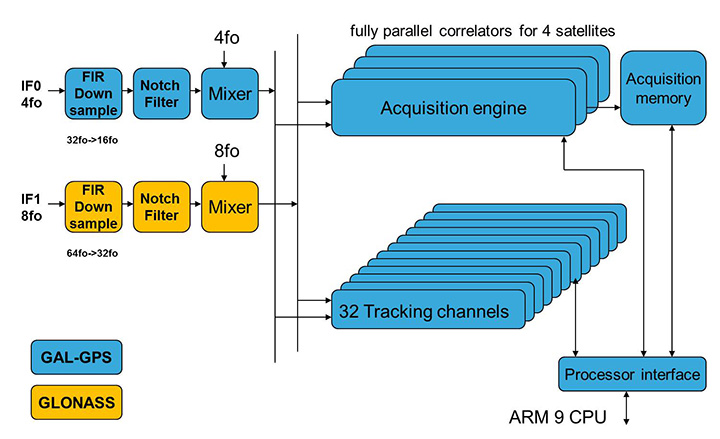
Figure 2. Teseo-2 RF hardware changes for GLONASS.Figure 3. Teseo-2 and Teseo-3 baseband changes for GLONASS.
The baseband changes added a second pre-processing chain and configured all the acquisition channels and tracking channels to flexibly select either input chain. Less visible, the code-generators were modified to support 511 chip codes and 511kchips/sec rates.
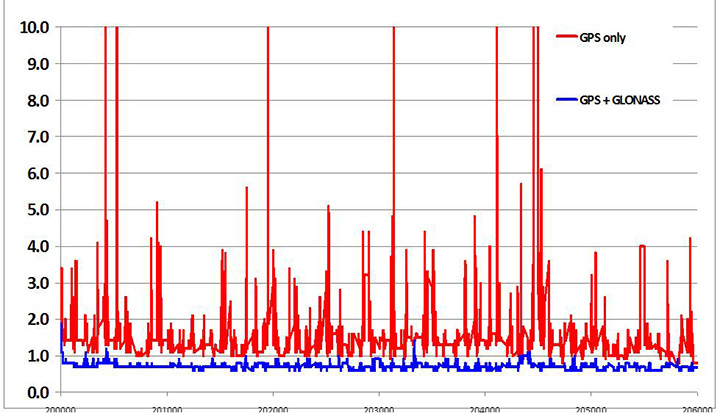
Teseo-2 appeared with GPS/GLONASS support in 2010, and demonstrated the benefit of GNSS in urban canyons, as shown by the dilution of precision (DOP) plot for central London in Figure 4. The GPS-only receiver (in red) has frequent DOP excursions beyond limits, resulting either in bad accuracy or even interrupted fix availability. In contrast, the GNSS version (in blue) has a DOP generally below 1, with a single maximum of 1.4, and thus 100 percent availability. Tracking 16 satellites, even if many are via non-line-of-sight (NLOS) reflected paths, allows sophisticated elimination of distorted measurements but still continuous, and hence accurate, positioning.
Figure 4. DOP/accuracy benefits of GNSS.
BeiDou
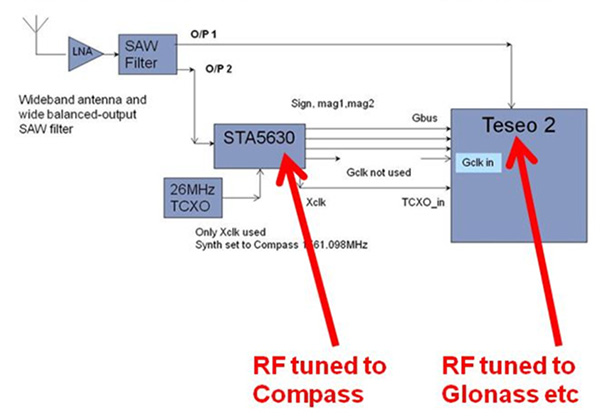
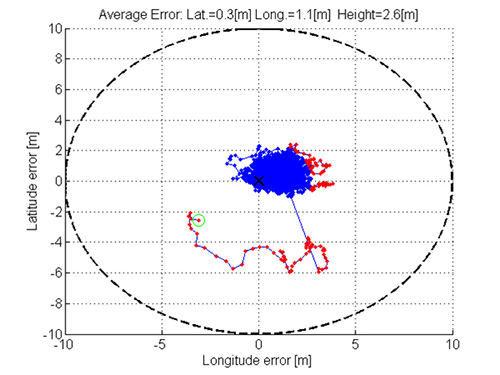
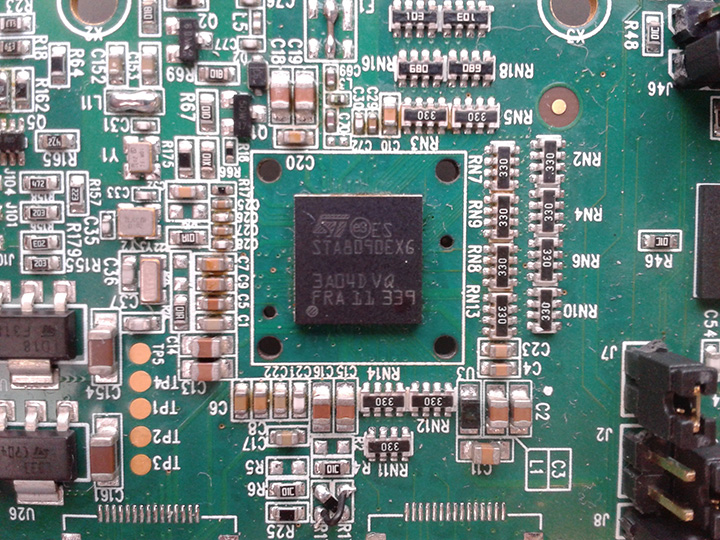
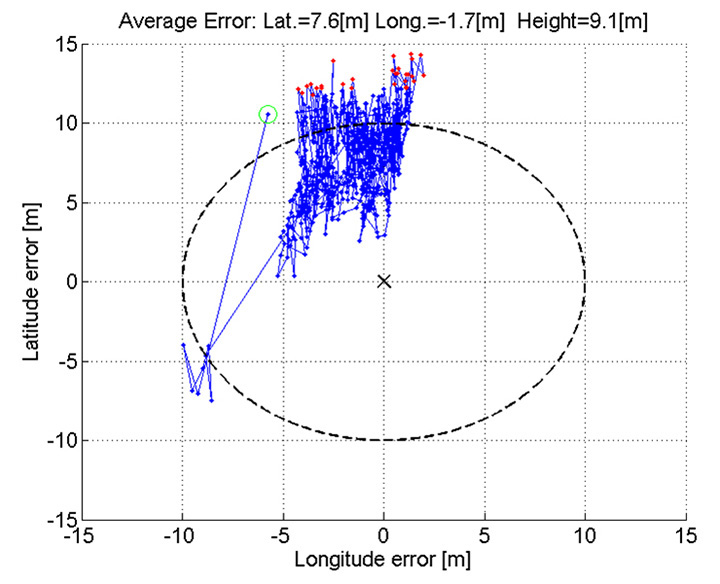
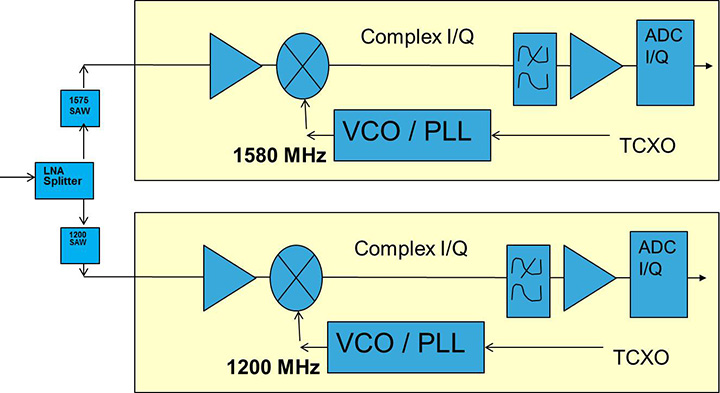
Like Galileo, BeiDou is a story of chapters. Chapter 1 was no ICD, and running on a demo dual-RF architecture as per the schematic shown in Figure 5. Chapter 2 was the same hardware with the test ICD, so all satellites, but still no positioning. Chapter 3 was the full ICD giving positioning in January 2013 (Figure 6), then running on the real Teseo-3 silicon in September 2013, shown in Figure 7.
Figure 5. Demo Teseo-2 dual RF implementation of BeiDou.Figure 6. Beidou positioning results.Figure 7. Teseo 3 development board.
The Teseo-3 has an on-chip RF section capable of GPS, Galileo, GLONASS and BeiDou, so no external RF is needed.
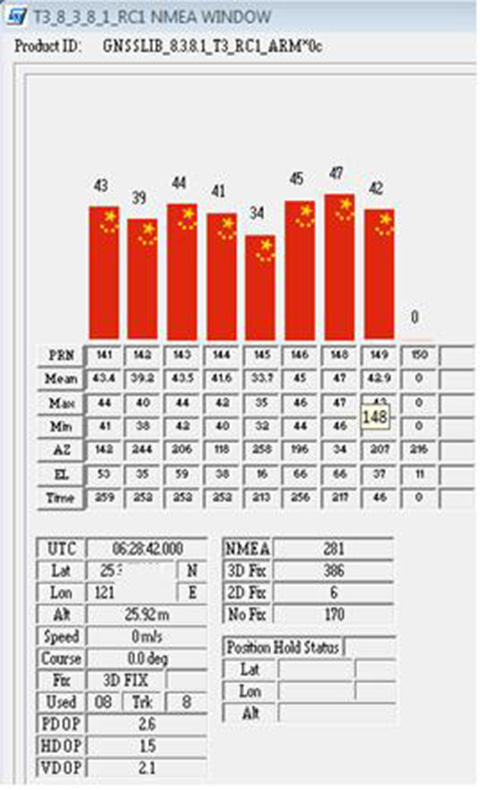
The clear green space around the Teseo-3 chip in the photo and the four mounting holes are for the bolt-down socket used to hold chips during testing, while the chip shown is soldered directly to the board. Figure 8A shows the development board tracking eight BeiDou satellites visible from Taiwan.
However, the silicon is not designed to be single-constellation; it is designed to use all the satellites in the sky. Figure 8b shows another test using GPS and BeiDou satellites simultaneously.
Figure 8A. Beidou.Figure 8b. GPS+Beidou.
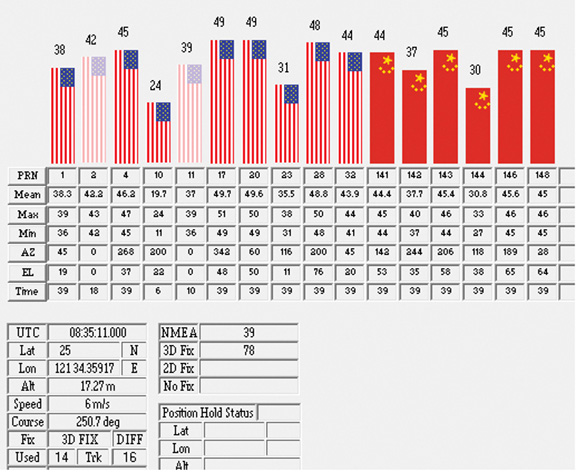
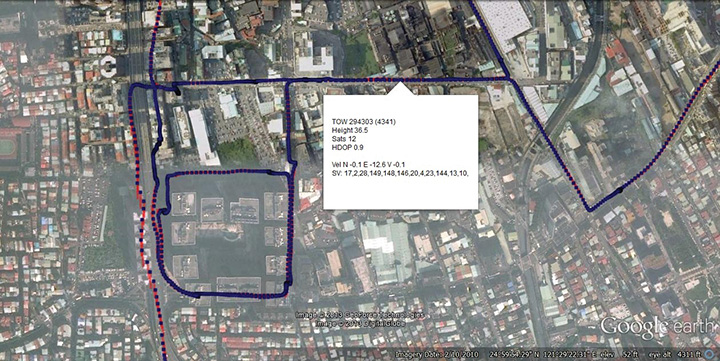
A mobile demo on the Teseo-3 model is shown running GPS plus BeiDou in Figure 9, a road test in Taipei. Satellites (SV) up to 32 are GPS, those over 140 are BeiDou, in the status window shown: total 13 satellites in a high-rise city area, though many are non-LOS.
Figure 9. GPS + Beidou roadtrack in Taipei.
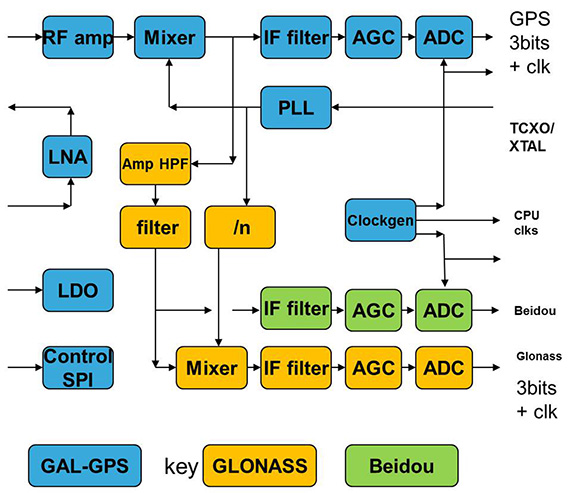
Extending the hardware to add BeiDou, which is on 1561 MHz and thus a third center frequency, meant adding another path through the IF stages of the on-chip radio. After the first mixer, GPS is at 4 MHz, and GLONASS at about 30 MHz, but BeiDou is at minus 10 MHz. While the IF strip in general is real, rather than complex (IQ), the output of the mixer and input to the first filter stage is complex, and thus can discriminate between positive frequencies (from the upper sideband) and negative ones (from the lower sideband), and this is normally used to give good image rejection. In the case of BeiDou, the filter input is modified to take the lower sideband, that is, negative frequencies, and a second mixer is not required; the IF filter is tuned to 10 MHz. The new blocks for BeiDou are shown in green in Figure 10. The baseband has no new blocks, but the code generator has been modified to generate the BeiDou codes (and, in fact, made flexible to generate many other code types and lengths). Two forms of Teseo-3 baseband are envisaged, the first being for low-cost, low-current continues to have two input paths, so must choose between GLONASS and BeiDou as required. A future high-end model may have an extra input processing path to allow use of BeiDou and GLONASS simultaneously.
Figure 10. Teseo-3 RF changes for Beidou shown in green.
Galileo Again
Maintaining the chronological sequence, Galileo gets a second chapter in three steps. In December 2012, it was possible for the first time to track four IOV satellites simultaneously, though not to position due to the absence of valid orbit data. In March 2012, it was possible for the first time to demonstrate live positioning, and this was done using Teseo-2 simultaneously by ESA at ESTEC and STMicro in Naples and Milan, our software development centres.
The demos were repeated in public for the press on July 24, 2013, at Fucino, Italy’s satellite earth station, with ESA/EC using the test user receiver (TUR) from Septentrio, and ST running simultaneous tests at its Italian labs. Figure 11 and Figure 12 show the position results for the data and pilot channels respectively, with independent LMS fixes. In real life, the fixes would be from a Kalman filter, and would be from a combined E1-B/E1-C channel, to take advantage of the better tracking on the pilot.
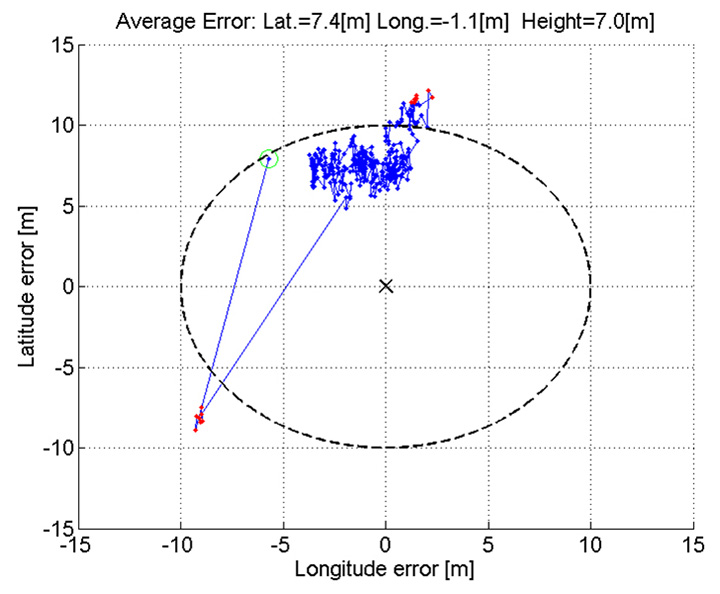
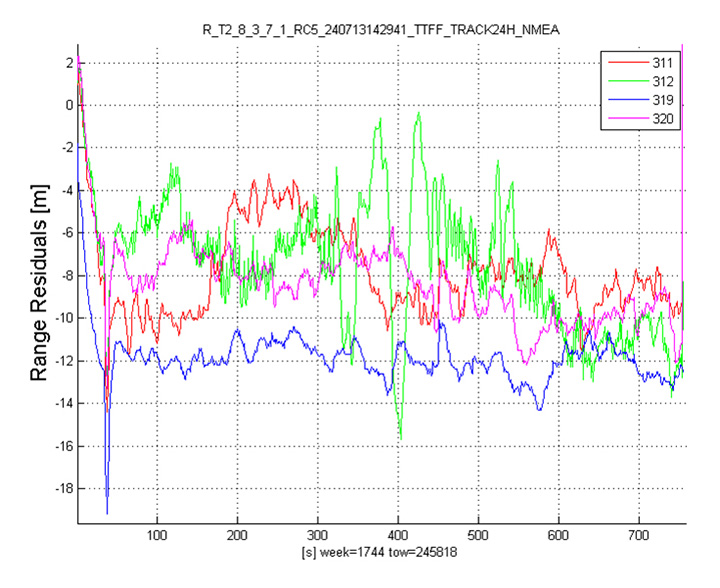
Good accuracy is not expected from Galileo at this stage. The four satellites, while orbited to give good common visibility, do not also give a good DOP; the full set of ground monitoring stations is not yet implemented and cannot be well calibrated with such a small constellation. Finally, the ionospheric correction data is not yet available. Despite these problems, the residuals on the solutions, against a known fixed position for the rooftop antenna, are very respectable, shown in Figure 13.
Figure 13. Galileo residuals, L1-B.
The common mode value is unimportant, representing only an offset in the receiver clock, and 10 meters is about 30 nanoseconds. The accuracy indicator is the spread between satellites, which is very respectable for a code-only receiver without full iono correction, especially around 640 on the TOW scale, where it is less than 2 meters. The rapid and major variation on the green data around t=400 is considered to be multipath, as the roof antenna is not ideally positioned with respect to other machinery and equipment also installed on the roof.
QZSS and GPS-III/L1C
Teseo-2 has supported the legacy (C/A code) signal on QZSS for some time, but Teseo-3 has been upgraded to handle the GPS-III/L1-C signal, waiting for modernized GPS. This signal is already available on the QZSS satellite, allowing tests with real signals. Significant changes were required in the baseband hardware, as the spreading code is a Weill code, whose generation complexity is such that it is generated once when the satellite is selected, then replayed real time from memory. Additionally it is long, in two domains. It is 10230 chips — that is, long to store but also long in time, with a 10-millisecond epoch. On Teseo-3, the legacy C/A code is used to determine code-phase and frequency before handing over to the Weill code for tracking.
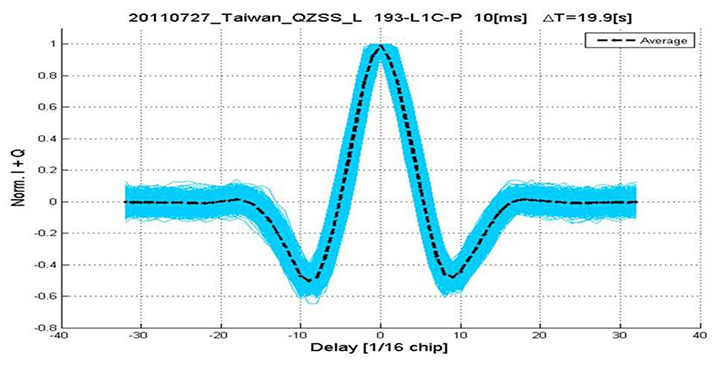
Using a long-range crystal ball and looking far into the future, a model of the future Teseo-4 DSP hardware is available, with 64 correlation taps per satellite. Running this on the captured QZSS L1-C signal gives the correlation response shown in Figure 14. Having multiple taps removes all ambiguity from the BOC signal, simultaneously removing data transitions, which can alternatively be pre-stripped using the known pilot secondary code (which on GPS III is 5 dB stronger than the data signal). The resultant plot represents 2,000 epochs, each of 10 milliseconds, plotted in blue, with integrated result for the full 20 seconds shown in the black dashed line. Assuming vehicle dynamics is taken out using carrier Doppler, this allows extremely precise measurement of the code phase, or analysis of any multipath in order to remove it. This RF data was captured on a benign site with a static antenna, so it shows little distortion.
Figure 14. L1-C tracking on QZSS satellite.Figure 15. Dual RF implementation of dual-band front end.
The Future
Having already built in extreme flexibility to the code generators to support all known signals and generalized likely future ones, the main step for the future is to support multiple frequencies, starting with adding L5 and/or L2, but as before, ensuring that enough flexibility is built in to allow any rational user/customer choice. It is not viable for us to make silicon for low-volume combinations, nor to divide the overall market over different chips. Thus our mainstream chip must also support the lower volume options.
We cannot, however, impose silicon area or power consumption penalties on the high-volume customer, or he will not buy our product.
Thus, our solution to multi-frequency is to make an RF that can support either band switchably, with the high band integrated on the volume single-chip GNSS. Customers who also need the low band can then add a second RF of identical design externally, connected to the expansion port on the baseband, which has always existed for diagnostic purposes, and was how BeiDou was demonstrated on T2. By being an RF of identical design to the internal one, it incurs no extra design effort, and would probably be produced anyway as a test chip during the development of the integrated single-chip version. Without this approach, the low volume of sales of a dual-band radio, or a low-band radio, would never repay its development costs.
Conclusions
All four constellations have been demonstrated with live satellite signals on Teseo-2, a high-volume production chip for several years, and on Teseo-3 including use in combinations as a single multi-constellation positioning solution. With the advent of Teseo-3, with optimized BeiDou processing and hardware support for GPS-3/L1C, a long-term single-chip solution is offered.
For the future, dual-frequency solutions are in the pipeline, allowing full advantage of carrier phase, and research into moving precise point positioning and real-time kinematic into the automotive market for fields such as advanced driver-assistance systems.
Acknowledgments
Teseo III design and development is supported by the European Commission HIMALAYA FP-7 project.
This article is based on a technical paper first presented at ION-GNSS+ 2013 in Nashville, Tennessee.
ST GPS products, chipsets and software, baseband and RF are developed by a distributed team in: Bristol, UK (system R&D, software R&D; Milan, Italy (Silicon implementation, algorithm modelling and verification); Naples, Italy (software implementation and validation); Catania, Sicily, Italy (Galileo software, RF design and production); Noida, India (verification and FPGA). The contribution of all these teams is gratefully acknowledged.
Philip G. Mattos received an external Ph.D. on his GPS work from Bristol University. Since 1989 he has worked exclusively on GNSS implementations, RF, baseband and applications. He is consulting on the next-generation GNSS chips, including one-chip GPS (RF+digital), and high-sensitivity GPS and Galileo for indoor applications, and combined GPS/Galileo/GLONASS chipsets. In 2008-2009, he re-implemented LORAN on the GPS CPU, and in 2009-2010 led the GLONASS implementation team. He is leading the team on L1C and BeiDou implementation, and the creation of totally generic hardware that can handle even future unknown systems.
Fabio Pisoni has been with the GNSS System Team at STMicroelectronics since 2009. He received a master’s degree in electronics from Politecnico di Milano, Italy, in 1994. He was previously with the GNSS DSP and System Team in Nemerix SA and has earlier working experience in communications (multi-carrier receivers).
Artist’s concept of a GPS III satellite in orbit, courtesy of Lockheed Martin.
Air Force Orders GPS III Satellites 05 and 06 from Lockheed Martin
A December 12 contract modification provided Air Force funding to Lockheed Martin to complete the fifth and sixth GPS III space vehicles (SV 05-06). Lockheeed originally received funding to procure long-lead parts for satellites five through eight (SV 05-08) in February 2013.
The $200,700,415 cost-plus-incentive-fee modification (P00276) on an existing contract (FA8807-08-C-0010) for GPS III space vehicles 05 and 06 means that work will be performed at Littleton. Colorado and Clifton, New Jersey, and is expected to be completed by Dec. 14, 2017 for space vehicle 05 and June 14, 2018 for space vehicle 06. The Air Force Space and Missile Systems Center Contracting Directorate, Los Angeles Air Force Base, California, is the contracting activity.
Galileo Achieves First Airborne Tracking
The European Space Agency’s Galileo satellites have achieved their first aerial fix of longitude, latitude, and altitude, enabling the inflight tracking of a test aircraft.
ESA’s four Galileo satellites in orbit have supported months of positioning tests on the ground across Europe since the first fix in March. Now the first aerial tracking using Galileo has taken place, determining the position of an aircraft using only its own independent navigation system.
The milestone took place on a Fairchild Metro-II above Gilze-Rijen Air Force Base in the Netherlands on November 12. It was part of an aerial campaign overseen jointly by ESA and the National Aerospace Laboratory of the Netherlands, NLR, with the support of Eurocontrol, the European Organisation for the Safety of Air Navigation, and LVNL, the Dutch Air Navigation Service Provider.
A pair of Galileo test receivers was used aboard the aircraft, the same kind employed for Galileo testing in the field and in labs across Europe. They were connected to an aeronautical-certified triple-frequency Galileo-ready antenna mounted on top of the aircraft.
Tests were scheduled during periods when all four Galileo satellites were visible in the sky. The receivers fixed the plane’s position, as well as determining key variables such as the position, velocity, and timing accuracy; time to first fix; signal-to-noise ratio; range error; and range–rate error.
Testing covered both Galileo’s publicly available Open Service and the more precise, encrypted Public Regulated Service, whose availability is limited to governmental entities.
Flights covered all major phases: take off, straight and level flight with constant speed, orbit, straight and level flight with alternating speeds, turns with a maximum bank angle of 60 degrees, pull-ups and push-overs, approaches and landings.
The flights also allowed positioning to be carried out during a wide variety of conditions, such as vibrations, speeds up to 456 km/h, accelerations up to 2 ghorizontal and 0.5–1.5 gvertical, and rapid jerks. The maximum altitude reached during the flights was 3,000 meters.
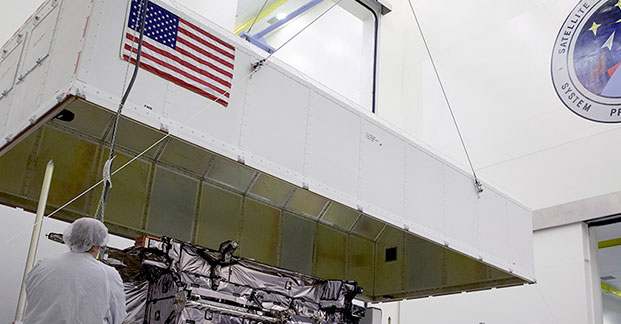
GPS III Prototype Proves Constellation Compatibility
The Lockheed Martin prototype of the next-generation GPS satellite, the GPS III, has proven that it is backwardly compatible with the existing GPS satellite constellation in orbit.
During tests concluded on October 17, Lockheed Martin’s GPS III testbed successfully communicated via cross-links to Air Force simulators of the current GPS constellation in orbit. The current GPS constellation includes GPS IIR, GPS IIR-M, and GPS IIF satellites.
Testing also demonstrated the ability of an Air Force receiver to track navigation signals transmitted by the GPS III Nonflight Satellite Testbed (GNST). The GNST is a full-sized, functional satellite prototype at Cape Canaveral Air Force Station.
“These tests represent the first time when the GNST’s flight-like hardware has communicated with flight-like hardware from the rest of the GPS constellation and with a navigation receiver,” explained Paul Miller, Lockheed Martin’s director for GPS III Development. “This provides early confidence in the GPS III’s design to bring advanced capabilities to our nation, while also being backward-compatible.”
The first flight-ready GPS III satellite is expected to arrive at Cape Canaveral in 2014, for launch by the Air Force in 2015.
GPS III satellites will be the first GPS space vehicles with a new L1C civil signal designed to make it interoperable with other international global navigation satellite systems.
The GNST has helped to identify and resolve development issues prior to integration and test of the first GPS III flight space vehicle (SV 01). It has gone through the development, test, and production process for the GPS III program first, significantly reducing risk for the flight vehicles, improving production predictability, increasing mission assurance, and lowering overall program costs.
The GPS III team is led by the Global Positioning Systems Directorate at the U.S. Air Force Space and Missile Systems Center.
Lockheed Martin is the GPS III prime contractor, with teammates including ITT Exelis, General Dynamics, Infinity Systems Engineering, Honeywell, ATK, and other subcontractors.
Good News for Users and Manufacturers
The U.S. Air Force is directing transmission of continuous CNAV message-populated L2C and L5 signals starting in April 2014. The move is designed to help development of user equipment compatible with the civil signals. Full text of the CNAV memo appears below.
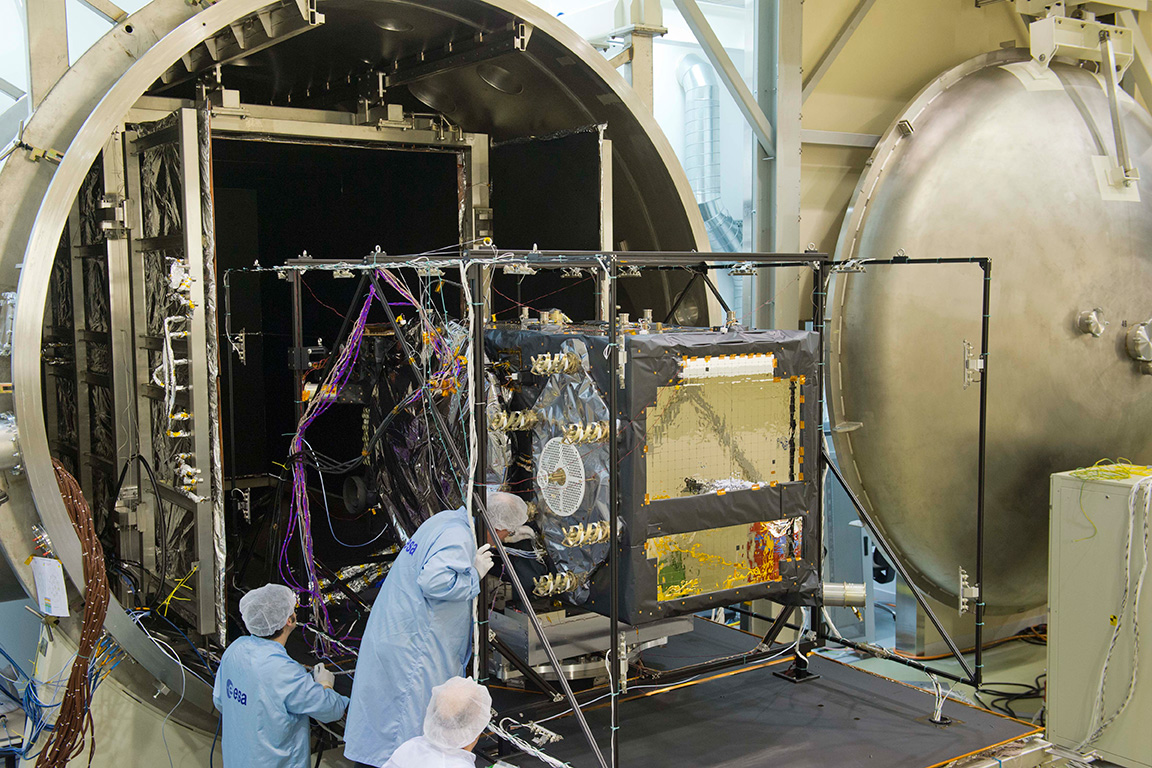
Galileo FOC Satellites Endure Simulated Space Tests
The European Space Agency’s newest Galileo satellite has emerged from five weeks of simulated space conditions. On November 29, a hatch slid open to end its thermal-vacuum test, a milestone on the way to orbit.
The satellite was placed in the 4.5-meter-diameter Phenix chamber in ESA’s ESTEC Test Centre in Noordwijk, the Netherlands, in late October. Once inside, the air was pumped out to create a space-quality vacuum. Temperature extremes were also reproduced, with the six copper walls of the thermal tent cooled by liquid nitrogen down to –180°C.
A second Galileo vehicle has been undergoing the same rigors at the site, along with a vibration and shock test to reproduce separation from the launcher. Thermal-vacuum testing on the second model will begin in early 2014. The two satellites will be launched on a Soyuz rocket from Europe’s Spaceport in French Guiana in mid-2014.
The next satellite is expected to arrive at ESTEC in March, with further satellites following every seven weeks or so. A total of 22 FOC satellites are being built by OHB in Germany, with navigation payloads being delivered from Surrey Satellite Technology Ltd. in the UK.
The first Galileo Full Operational Capability satellite emerges from the Phenix test chamber after five weeks of thermal–vacuum testing.
Hello, everyone, I am looking for a tool/software which can generate a satellite geometry distribution map of Chinese BeiDou over Asia. Just like a GPS PDOP global map. Could anyone give me a help? Thanks a lot in advance.
We use this tool to plot satellite coverage: www.agi.com/
We have a standard mission planning tool that can do it (GPS, GLONASS, Galileo and BeiDou) and is included with our post-processing software, called EZSurv. If you’re interested to try the planner, I can send an evaluation copy of it.
You can use the (free!) Trimble online Planner (www.trimble.com/GNSSPlanningOnline/#/SatLibrary). Supports GPS, GLONASS, Galileo, BeiDou, QZSS. There was an offline tool available, too, but can’t find it anymore. Really helpful tools, thanks Trimble!
We at GMV have our own Service Volume Simulator, named polaris (www.gmv.com/en/space/Polaris/). polaris has been (and is being) extensively used in the Galileo and EGNOS programmes.
From the CANSPACE Discussion Group (ListServ)
I’d like to view broadcast SV health data that is accurate to the minute. When I use IGS stations, I can only find health data in nav files to the resolution of two hours. Could someone point me to where I could find SV health data with the granularity of 1 minute or better?
Comments
Some IGS stations stream data, including ephemerides, in real time. Presumably, any change in SV health would be reflected in an updated ephemeris. Real-time ephemeris data from the global network is provided on available Ntrip streams. Georg Weber (the scientific director in the Department of Geodesy at the German Federal Agency for Cartography and Geodesy (BKG) and a member of the IGS Real-time Working Group and the Radio Technical Commission for Maritime (RTCM) Services Special Committee (SC) 104 on Differential Global Navigation Satellite Systems (DGNSS)) kindly supplied this information:
“If I understand things correctly, then an updated navigation message is disseminated immediately when GPS operators become aware of a problem and that this is the only real-time source of information regarding SV health coming directly from the system. Hence real-time access to RTCM broadcast ephemeris messages is what you are asking for. Here is how to get it:
Pull stream RTCM3EPH for a few seconds and convert its contents to RINEX2 or RINEX3 navigation files.
Stream RTCM3EPH contains only broadcast ephemeris for GPS and GLONASS as received from the global real-time IGS network — no observations. The broadcast ephemeris repetition/update rate is 5 seconds.”
The Navigation message is only updated every two hours (currently) so the granularity you require is not possible, as the health flag is an official designation from the GPS control center. The fastest changing navigation files are in the IGS Data centers called “hourDDD0.13n” for example, for today here: ftp://cddis.nasa.gov/gps/data/hourly/2013/318/hour3180.13n.Z
This file gets updated hourly (or more) with the contributions from the navigation files of the IGS network.
A faster way of noting changes would be to monitor several worldwide data real-time streams from public stations using the BNC software to monitor the health flags, but while the data will come in real-time the changes in flag status only take place every two hours, but at least you will see a health flag change very quickly. Check out:
Prague is now the headquarters of the European GNSS Agency (GSA).
A holiday card from a colleague in Europe calls to mind GNSS’s headlong course into the future, coupled with that most backward-reflective of human preoccupations, history.
The European GNSS Agency (GSA), whence originated this card, moved from Brussels to Prague in September 2012, in a nod to the pan-European nature of the European Union (EU) generally and its GNSSs, Galileo and EGNOS, in particular. No EU agency headquarters had been sited in Eastern Europe, and it was deemed that some soon must do. Prague made a strong bid for the GSA.
A political, cultural, and economic center of central Europe under its current name since the year 908, it has a settlement history dating back to 1306 BC. Good King Wenceslaus, who looked out upon the snow round about, deep and crisp and even, and about whom we sang festively this past season, ruled from Prague around 935, subsequently rose to sainthood, and is the patron saint of Bohemia, the Czech homeland.
The GSA has a rather variegated mission: it “manages public interests related to European GNSS programmes.” This includes everything from marketing to security — in a sense, everything satnav-related that scientists and engineers do not do. Its list of tasks and responsibilities includes 12 subheads and 61 bulleted points.
Carlo des Dorides, GSA executive director, noted upon opening the new headquarters in 2012 that Prague derives from the Slavic word praga, for threshold. “I think this is appropriate for the GSA and Galileo, as it represents the beginning of a key step for both.” EC vice-president Antonio Tajani added, “Galileo is important not only for space policy and science, but for the services and jobs that it brings.”
Thus the many GSA staffers labor to wring full advantage for modern economies from the space-based radio signal generators, amid the cobblestone streets and ancient monuments of one of the best-preserved ancient European cities, a UNESCO Cultural Heritage site.
While busily plunging into the future, we cannot escape our past.
Raytheon Intelligence and Information Systems has been awarded a change order for work that costs up to $8.5 million on its existing contract to ensure that the new military signal, M-code, works with the GPS Operational Control System, according to an announcement from the Pentagon as reported by Space News.
Raytheon is building the ground station (OCX) for a new generation of satellites that will bring more safety and precision to GPS. The contract modification is to assure implementation of M-code capabilities across OCX Block 1 and 2. M-code is the new highly secure, anti-jam signal designed for the GPS III constellation. The current GPS ground control system lacks M-code capability.
The OCX is designed to work with the advanced GPS III positioning, navigation and timing satellites, slated to start launching in 2015, and also will be backwardly compatible with existing GPS satellites.
Raytheon won the $886.4 million prime contract to develop the OCX in February 2010. Work will be performed at Raytheon’s facility in Aurora, Colorado, and is expected to be completed by August 31, 2016.
The Air Force Space and Missile Systems Contracting Directorate, Los Angeles Air Force Base, California, is the contracting agency.
Details on the contract change order: Raytheon Intelligence and Information Systems, Aurora, Colo., has been awarded an unpriced change order (P00112) with a not-to-exceed of $8,595,748 on an existing contract (FA8807-10-C-0001) for M-Code Implementation on the Operational Control System. The contract modification is to assure implementation of M-Code Capabilities across OCX Block 1 and 2. Work will be performed at Aurora, Colo., and is expected to be completed by Aug. 31, 2016. Fiscal 2014 research and development funds will be obligated at definitization. The Air Force Space and Missile Systems Contracting Directorate, Los Angeles Air Force Base, Calif., is the contracting activity.
NovAtel Inc., a manufacturer of GNSS precise positioning technology, has announced an agreement with the Indian Space Research Organisation (ISRO) to supply reference receiver products for use in the Indian Regional Navigation Satellite System (IRNSS) ground segment.
India-based Elcome Technologies Pvt. Limited, a sister company to NovAtel in the Hexagon Group of Companies, will provide local integration, training and technical support services for the NovAtel receivers.
These receivers are based on NovAtel’s G-III reference receiver platform, the same platform used for the Third Generation WAAS Reference Receiver (WAAS G-III), which will monitor the GPS signals for the FAA’s modernized Wide Area Augmentation System network.
The global market for location-based applications is poised for rapid growth, as the mass adoption of global positioning system (GPS)-enabled smartphones is encouraging developers to introduce numerous advanced applications, says market research agency Frost & Sullivan.
New analysis from Frost & Sullivan finds that indoor connectivity, augmented reality, big data and wearable devices are the key technology trends likely to fuel the uptake of location-based applications. Location-based technology and data can then be combined to facilitate the development of smart spaces in every city and community.
“Location-based application developers have so far focused on the development of outdoor applications due to the adoption of GPS positioning in smartphones,” noted Frost & Sullivan Information & Communication Technologies Research Analyst Shuba Ramkumar. “However, as individuals spend more time indoors, there is a need to roll out indoor location-based applications that capitalise on various functionalities such as mapping, navigation and geo-fencing.”
According to the announcement, augmented reality technology could also be used to make location-based applications more interactive. Further, the widening ecosystem of wearable devices such as Google Glass and Samsung Galaxy Gear infuses technology into the daily lives of individuals, widening the scope of context-aware applications. However there are several challenges restricting the growth of the location-based applications market. The lack of standardisation in indoor positioning technologies such as Wi-Fi, sensors and Bluetooth is complicating the development of indoor applications. Location-based application providers will need to wait until wearable device manufacturers address the issues of limited battery life and dependence on smartphones for outdoor connectivity.
Frsot & Sullivan reports that market participants also find it difficult to monetise applications due to the absence of a clear business model. In this scenario, application developers should seek to identify new sources of revenue. They can expedite market expansion by establishing contracts with indoor venues to provide customised applications, and by working with wearable device manufacturers to create related applications.
“Stakeholders should work together to identify the most reliable and accurate indoor positioning technologies that can steer the indoor connectivity market forward,” said Ramkumar “The In-Location Alliance is one such initiative formed by market participants to discuss and resolve issues concerning indoor positioning technologies.”
During the August test, the GPS III Non-flight Satellite Testbed (GNST) proved that it could connect with and receive commands from the Launch and Check Out System.
Lockheed Martin Corporation has been awarded $200 million to produce GPS III satellites SV05 and SV06 by the U.S. Air Force. Lockheed Marin originally received funding to procure long-lead parts for satellites five through eight (SV05-08) in February.
The award is a $200,700,415 cost-plus-incentive-fee modification (P00276) on an existing contract (FA8807-08-C-0010). Work will be performed at Littleton, Colorado, and Clifton, New Jersey.
Work is expected to be completed by December 14, 2017, for space vehicle 05, and June 14, 2018, for space vehicle 06.
Fiscal 2013 missile procurement funds in the amount of $200,700,415 are being obligated at time of award. The Air Force Space and Missile Systems Center Contracting Directorate, Los Angeles Air Force Base, California, is the contracting activity.
The U.S. Air Force is directing transmission of continuous CNAV message-populated L2C and L5 signals starting in April 2014. The move is designed to help development of user equipment compatible with the civil signals. Full text of the CNAV memo appears below.
MEMORANDUM FOR THE NATIONAL COORDINATION OFFICE FOR SPACE BASED POSITIONING, NAVIGATION AND TIMING
ATTENTION: DR. JAN BRECHT-CLARK
FROM: AFSPC/CC
Peterson AFB CO
SUBJECT: Early Civil Navigation (CNAV) Message-Populated L2C and L5 Signals
I have directed transmission of continuous CNAV message-populated L2C and L5 signals prior to fielding the Next Generation Operational Control Segment. This provision of populated signals will facilitate development of compatible user equipment and a CNAV Operations Concept.
The message-populated broadcast is projected to begin April 2014. Users should expect initial CNAV signal accuracy to be less than the legacy signals. Upon full implementation in December 2014, CNAV signal accuracy should meet or exceed the legacy signals.
Air Force Space Command is committed to ensuring GPS remains the world’s gold standard for PNT services. The user community can anticipate additional information on CNAV message implementation in the months preceding the initial April broadcast.
Bradford Parkinson, who is known as “the father of GPS,” will give a keynote speech during the opening session of the European Navigation Conference 2014. The conference will be held April 15-17, 2014, in Rotterdam, The Netherlands.
Parkinson’s speech is titled “Assured PNT – Assured World Economic Benefits.” Representatives of the European Commission, the European GNSS Agency, and the European Space Agency will also present keynotes in the opening program.
The conference focuses on technology, innovation and business. Special sessions are scheduled on the Galileo IOV, Galileo PRS, alternatives and back-ups to GNSS ,and PNT applications in the various sectors of land, sea and air.
The conference program will be complemented with an icebreaker party on April 14 at WTC and a conference dinner on board the paddle steamer De Majesteit on April 16. The City of Rotterdam has invited conference delegates to a reception at Rotterdam City Hall on April 15. Accompanying persons are welcome to join these events, as well as the guided walking tour on Tuesday.
With Easter following the conference, there is a good opportunity to visit Rotterdam, tulip fields, windmills, museums and other attractions in The Netherlands.
Deadline for abstracts is December 31. Early bird registration is possible until February 15, 2014.