OceanGate. (Credit: Screenshot of NBC news coverage)
On June 17, an OceanGate Expedition Titan submersible launched off the coast of Newfoundland, Canada, carrying five passengers to the bottom of the Atlantic Ocean to explore the infamous R.M.S. Titanic shipwreck. The U.S. Coast Guard said that the submersible lost contact with the surface vessel about an hour and 45 minutes after the launch and has not been in contact since.
The submersible can support life for 96 hours. As of the afternoon of June 20, it had 40 hours of oxygen left and U.S. and Canadian agencies were still searching for it.
The Titan submersible explained
According to the OceanGate website, the Titan is “a Cyclops-class manned submersible designed to take five people to depths of 4,000 [m] (13,123 [ft]) for site survey and inspection, research and data collection, film and media production, and deep-sea testing of hardware and software.” The Titan is equipped with an inertial navigation system (INS), an ultra-short base line acoustic positioning system, a robotics laser scanner, a Teledyne 2D sonar and more.
While it is equipped with an INS, the Titan relies on messages from a surface ship to guide the submersible to the shipwreck. The submersible and surface vessel rely on Elon Musk’s Starlink satellites for communication.
A part of the Titan worth mentioning, the crew is sealed inside and bolts are applied to the outside — needing an external crew to remove them upon surfacing.
Foreshadowing
The New York Postreported, in 2022, that an OceanGate Expedition to the Titanic lost contact for more than two hours and never found the wreck.
Aboard the submersible was a CBS correspondent, David Pogue, who was filming a segment for CBS Sunday Morning. He tweeted about the incident.
There are 18 planned expeditions to the Titanic with OcenGate Expeditions to survey the shipwreck, collect data, and document high-resolution images and videos.
The entire trip to the Titanic wreck site takes 8 days, and one dive can take up to 10 hours. The expedition is comprised of five legs.
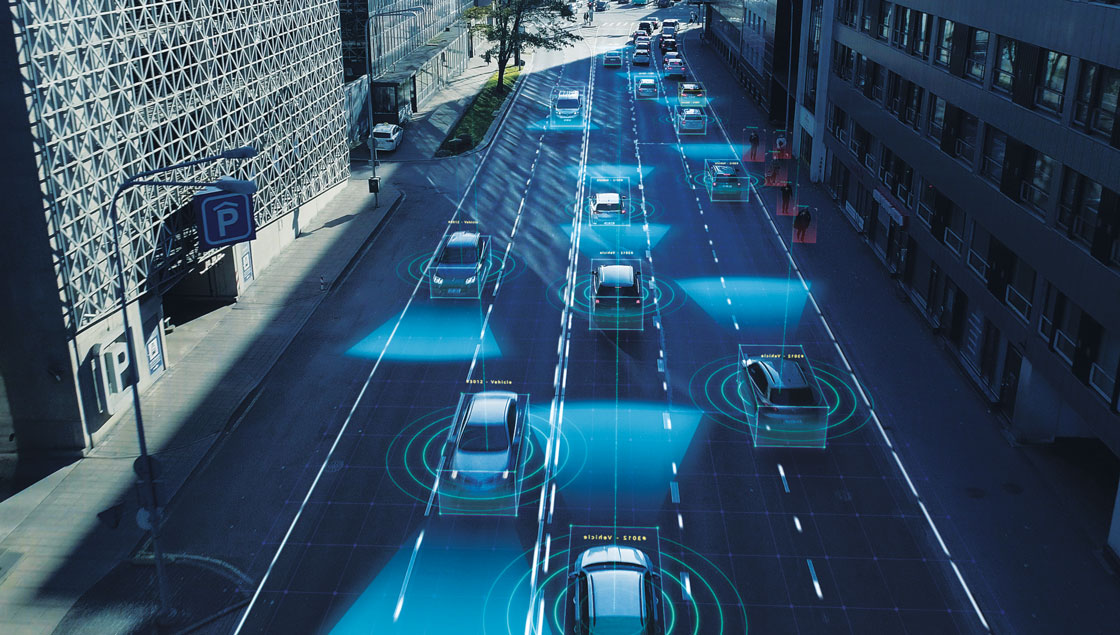
GNSS researchers presented hundreds of papers at the 2022 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 19–23, 2022 in Denver, Colorado, and virtually. The following four papers focused on autonomous applications in transportation. The papers are available here.
Addressing integrity monitoring of autonomous navigation
There are critical issues for the integrity monitoring of autonomous navigation applications, which include an adequate uncertainty budget in the observation domain, redundancy for the determination of the navigational states, and the capability of fault detection and exclusion.
Several aspects are addressed in the paper, including how to: determine interval bounds to handle GNSS multipath effects in urban environments, realize fault detection and exclusion based on constraint satisfaction and set membership, and improve the detector using weighting models.
The authors of the paper aim to contribute to the alternative integrity approach based on interval and set representations for bounding and propagating system uncertainty. Simulated and real-world experiments are carried out to demonstrate the feasibility of the authors’ proposed methods.
The authors note that statistical evaluation of integrity will not always suffice due to the presence of remaining systematic uncertainty, but state the alternative integrity approach will contribute to future autonomous navigation applications.
Su, Jingyao; Schön, Steffen; “Advances in Deterministic Approaches for Bounding Uncertainty and Integrity Monitoring of Autonomous Navigation.”
Estimation and reference systems in automation
For a high level of automation, estimation is crucial, and to achieve a full and reliable navigation evaluation, a trustable reference system needs to be developed.
Although the presence of a reference system and of an inertial measurement unit with GNSS through the multi-sensor fusion scheme was integrated, in GNSS-denied or challenging environment the navigation solution could not be accurately estimated and still needs to be fixed.
The authors of the paper propose new strategies to better estimate the lidar-based position uncertainty and to update the reference system.
The first strategy proposed involves determining the appropriate position error covariance matrix, based on the Hessian matrix and the scale of covariance obtained from a normal distribution transform (NDT) scan matching technique and the geometric dilution of precision computed from the distribution of point cloud segments in each scan.
In the second strategy proposed in the paper, the updated reference system was post-processed according to the loosely coupled INS/GNSS/NDT integration scheme with a forward and backward smoothing process.
The results of the proposed strategies indicated that the updated reference system provides more reliable navigation estimation compared to an existing reference system from commercial software and can be used for accurate evaluation of positioning, navigation and timing with automated vehicle applications.
Srinara, Surachet; Chiu, Yu-Ting; “Adaptive Covariance Estimation of Lidar-Based Positioning Error for Multi-Sensor Fusion Scheme with Autonomous Vehicular Navigation System.”
Evaluating TerraStar-X
GNSS performance using typical, low-cost GNSS devices in vehicles is not enough to achieve the positioning and availability needed for lane-level accuracy on autonomous vehicles. The antenna and receiver hardware available in standard vehicles limits the position accuracy and convergence performance. These limitations make the positioning more susceptible to error sources such as receiver multipath, noise, carrier tracking and stability.
GNSS correction services with additional design considerations and sophisticated algorithms are needed to work within the constraints of automotive-grade GNSS devices to achieve the performance required for lane-level positioning.
TerraStar X technology from NovAtel enables these applications. It includes an orbit and clock determination system (OCDS), which produces a set of corrections, precise satellite orbits and clocks, and satellite-specific biases for individual signals augmented by the computation of additional regional corrections.
The authors of the paper outline the design and performance of the combined OCDS and regional correction system. They demonstrate the performance of the TerraStar X technology across a variety of applications.
The addition of regional corrections enables automotive and mass-market applications to achieve in-lane positioning in seconds, using any dual-frequency, dual-constellation GNSS hardware. The result is software that provides a continuous stream of multi-constellation, multi-frequency GNSS corrections — enabling a correction service that makes the affordable GNSS device ecosystem possible.
Regional corrections also improve the performance of survey-grade GNSS receivers.
Mervart, Leos; Lukes, Zdenek; Alves, Paul; “TerraStar X Technology: Design of GNSS Corrections for Instantaneous Lane-Level Accuracy on Large Scale Connected Vehicles and Devices.”
Solving the localization problem in autonomous driving
The localization problem in autonomous driving imposes two criteria on the navigation solution: accuracy and reliability or integrity. According to the authors of this paper, solving the localization problem is a key requirement to enabling the development of autonomous platforms.
This paper presents AUTO, a real-time integrated navigation system that tightly integrates INS, GNSS-RTK, odometer, and multiple radars sensors with high-definition maps to achieve a high-rate, accurate, continuous, and reliable navigation solution. It also shows how AUTO leverages a tight integration of imaging radars with other traditional sensors to provide a robust navigation solution with corresponding estimates of the uncertainty.
The AUTO solution was tested in a variety of environments and locations, including a range of conditions such as winter weather, to assure the robustness and reliability required by autonomous applications.
The results demonstrate the lane level accuracy of the solution in a variety of challenging urban and downtown environments. Additionally, the tight integration enables the determination of protection levels to describe upper bounds on the uncertainty.
The results in the paper are illustrated using a Stanford Diagram, along with a user-defined alert limit to describe the solution integrity and availability. The proposed algorithm uses a map matching technique between the imaging radar data and a globally referenced high-definition map to better estimate the solution uncertainty and protection levels.
AUTO’s tightly integrated approach to integrity monitoring means uncertainties and protection levels can be determined even in areas where the system may experience extended periods of GNSS unavailability.
Krupity, Dylan; Chan, Billy; Ali, Abdelrahman; Salib, Abanob; Georgy, Jacques; Goodall, Christopher; “Integrity Monitoring and Uncertainty Estimation with AUTO’s Non-linear Integration of Multiple Imaging Radars and INS/GNSS for Autonomous Vehicles and Robots.”
Tallysman’s custom XF filtering has been tested to mitigate new (Europe and Japan) and existing LTE signals, enabling the XF antennas to produce clean and pure GNSS radio frequency data.
Image: Tallysman Wireless
The TW7972XF surface mount Accutenna antenna has a metal base and robust IP67 military-grade radome. Attachment methods include screws, adhesive tape, and magnet mount.
Many antenna connectors and cable options are available.
The Safran Navigation & Timing critical infrastructure solution, White Rabbit, has received high praise in a report published by the European Commission (EC) Joint Research Center (JRC) that evaluates the effectiveness of alternative positioning, navigation and timing (APNT) platforms.
For more than eight months, the commission studied a variety of available solutions to assess the performance of APNT demonstration platforms in a variety of situations where there is signal loss, and a backup system is necessary. The selected solutions were evaluated for precise and robust timing and positioning services in challenging indoor and outdoor environments.
Safran’s White Rabbit is a high-accuracy time and frequency distribution protocol, which combines precise time protocol (PTP) packets with the frequency base of Synchronous Ethernet (SyncE) to provide sub-nanosecond time transfer accuracy over an optical fiber. While the results of the test campaign showed that all APNT platforms under evaluation demonstrated performances in compliance with the requirements set, White Rabbit excelled in its performance.
Safran demonstrated White Rabbit’s ultra-accurate time transfer over fiber optics, its high-performance time generation, resiliency (based on failover and holdover), interoperability, and user-friendly monitoring capabilities.
As stated in the report, Safran demonstrated, “the ability to handle multiple master clock inputs with voting and seamless switchovers. Interconnecting as many NMIs as possible, with possible local atomic clock backups, would result in a very robust and resilient time architecture, independent from GNSS across Europe. The ability to provide resilient and accurate time through the EU communication infrastructure, ideally on the nanosecond level, would also enable robust positioning, using a combination of signals.”
Tallysman Wireless and u-blox have partnered to develop PointPerfect precise point positioning real-time kinematic augmented smart antennas.
The ZED-F9R high precision GNSS and the NEO-D9S L-band receivers from u-blox have been integrated with Tallysman’s technology. The product integration will provide accuracy and precision.
The multi-band (L1/L2 or L1/L5) architecture removes ionospheric errors, and the multi-stage enhanced XF filtering improves noise immunity while relying on the dual-feed Tallysman Accutenna element to mitigate multi-path signal interference rejection. Some versions of the new smart antenna solutions include an inertial measurement unit (dead reckoning) and an integrated L-band corrections receiver to ensure operation beyond terrestrial network reach.
The PointPerfect GNSS augmentation service is now available in North America, Europe and parts of Asia Pacific.
KP Performance Antennas, an Infinite Electronics brand and a manufacturer of wireless network antennas, has released internet of things (IoT) multiband combination antennas. The antennas are designed to enhance connectivity for vehicle fleets and base stations.
The IoT multiband combination antennas have dedicated ports for cellular, Wi-Fi and GPS bands. They are also indoor and outdoor IP69K rated and can withstand harsh environmental conditions, such as extreme temperatures, water and dust.
The antennas are suitable for transportation emergency response and agriculture applications.
KP Performance Antennas’ IoT multiband combination antennas are in-stock and available now.
TRX Systems has been awarded a $402 million, seven-year contract by the U.S. Army for the procurement of dismounted assured positioning, navigation, and timing system generation II systems and services (DAPS GEN II).
The TRX Systems solution to be provided under the contract, TRX DAPS II, enables dismounted maneuver operations even where GPS is compromised or denied. TRX DAPS II provides assured positioning, navigation, and timing (PNT) to dismounted users by disseminating assured position and time to dependent devices in GPS-challenged environments.
TRX DAPS II fuses inputs from M-code GPS, inertial sensors, and complementary PNT sources. It is a small, lightweight PNT device that supports both standalone operation and integration with the Nett Warrior ensemble. It can also distribute PNT information to a customized tactical watch.
The TRX DAPS II solution employs a modular architecture and adheres to Army PNT interface standards, facilitating the addition of new PNT sensors as threats evolve.
TRX DAPS II will be in production for the Army later this year.
Furuno will release a high-performance multi-GNSS timing antenna, the AU-500, in July. The antenna is suitable for time synchronization applications.
The AU-500 supports all constellations in the L1 and L5 bands, including GPS, QZSS, GLONASS, Galileo, BeiDou, and NavIC. A built-in noise filter eliminates interference in the vicinity of 1.5 GHz caused by 4G/LTE mobile base stations as well as other radio waves that can adversely affect GNSS reception.
The antenna is equipped with lightening protection and features a high-quality polymer radome that prevents snow accumulation. It is also waterproof and dustproof in compliance with IP67.
The AU-500 achieves the best performance in time accuracy and robustness fundamental in critical infrastructure, when combined with Furuno’s GNSS receiver, GT-100.
In addition to the AU-500, Furuno will also launch the AU-300, an L1 single-band antenna with the same level of performance as AU-500, except L5 signal reception.
Honeywell has developed the advanced air mobility (AAM) industry’s first certification reference guide across key vehicle segments. Business and government leaders, engineers, media and any user with an interest in the future of flight can use the Honeywell State of UAS and UAM Certification Guide to help navigate and communicate the complexities of vehicle certification and operational approval across multiple vehicle segments.
“We understand the challenges that professionals working in the advanced air mobility industry face as they look to navigate, track and ultimately comply with myriad developing regulations,” Jia Xu, chief technology officer, UAM and UAS, Honeywell Aerospace, said. “Because Honeywell provides certifiable, mission-critical systems that make AAM vehicles fly, it’s essential that we understand the certification landscape across all AAM segments. We initially developed this certification summary table as a quick reference for our own team; however, we quickly realized that the information here can benefit the wider industry. We intend to update this document regularly to help AAM companies keep pace with regulatory development.”
Industry professionals can access the living document at the following link. The certification reference guide will summarize evolving Federal Aviation Administration and European Union Aviation Safety Agency rules across multiple AAM segments. It will also link to source documents that AAM professionals can reference to better understand detailed certification requirements.
Leica Geosystems, part of Hexagon, has released an addition to its Leica Pegasus TRK portfolio of mobile mapping solutions, the Leica Pegasus TRK100. The mobile mapping system is a geospatial solution built for large-scale infrastructure measurement and digital twin creation.
The Pegasus TRK100 is small and light, making it easy to mount on any vehicle. The mobile mapping system features the same modular hardware approach that enables users to add more cameras to expand the range of use cases.
Image: Leica Geosystems
With its advanced mapping capabilities, the Pegasus TRK100 enables GIS professionals to visualize and understand the location of assets to help make the right decisions, improve asset management, and support infrastructure building and maintenance. The Pegasus TRK100 combines artificial intelligence and a learning algorithm to enhance and optimize the clarity of points in post-processing for improved accuracy.
The versatility of the Pegasus TRK100 suits a variety of applications in diverse industries, including telecommunications, utilities and road maintenance.
“The Leica Pegasus TRK100 advances autonomy and artificial intelligence in mobile mapping, removing manual process steps and providing actionable insights for informed decision,” Christian Schäfer, business director mobile mapping at Leica Geosystems, said. “It empowers GIS professionals to create the maps they need, collect the information they require, and visualize the data in a way that immediately aids understanding.”
OxTS has released the AV200, its inertial navigation system (INS) built for automation applications.
The AV200 is designed to reliably give precise location data. It includes quad-constellation, dual-antenna, real-time kinematic (RTK) GNSS, to provide users with position data as well as its temperature-calibrated, multi-core inertial measurement unit. These technologies give the AV200 position accuracy within 0.05 m, heading accuracy of 0.2°, and velocity accuracy of 0.2 km/h.
The AV200 is built using the same technology that is commonly used for NCAP test validation, which has become the preferred technology for OEMs globally to test vehicles in both test-track and real-world scenarios.
The AV200 has also been built specifically to address the realities of the autonomy market.
Singular XYZ has released the Sfaira One GNSS receiver. The portable size, centimeter-accurate receiver provides users with an entry-level network real time kinematic (RTK) rover.
Sfaira One is equipped with a GNSS module with 1,408 channels for GPS, BDS, GLONASS, Galileo and QZSS tracking — providing centimeter positioning in harsh environments. It also features advanced RTK and an anti-interference algorithm.
The GNSS receiver connects via Bluetooth and can be configured to conduct surveying tasks on a smartphone. Additionally, Sfaira One supports SingularPad and SingularSurv software and is also compatible with mainstream field survey or GIS software.
Sfaira One is IP65 dustproof and waterproof, which makes the receiver suitable for all weather conditions. It has a 4,800 mAh battery life with 16 hours working time and type-C interface that can be charged on-the-go with power bank.
The Sfaira One GNSS receivers are online at SingularXYZ’s website and are available now.