Spirent Federal Systems will demonstrate its GSS9790 simulator at ION GNSS+, taking place Sept. 14-17 in Tampa, Fla.
The Spirent demonstration “Interference and Anti-jam Antenna Testing Using the Spirent Wavefront Simulator (GSS9790)” will take place in Room 17 on Thursday, Sept. 17, 2-2:45 p.m. Attendance gains one ticket for an Apple Watch raffle, with the winner to be announced Thursday at 4 p.m., Booth C in the Exhibit Hall.
The ability of a CRPA to null out unwanted signals while still allowing wanted signals to be received is key to its performance. This ability allows GNSS receivers to continue to operate in challenging signal environments, Spirent said in an email. The similar but slightly different signal composition at each antenna element allows the CRPA to distinguish direction for wanted and unwanted signals. Recreating this signal environment in an anechoic chamber is critical in allowing the discerning test professional to rigorously evaluate the performance of a CRPA system.
The Spirent GSS9790 is designed for this testing. The 9790 allows for code, carrier and amplitude control on a satellite-by-satellite and interferer-by-interferer basis.
NSL is one of the companies in Europe involved in satellite navigation, specializing in developing reliable and robust GNSS technologies for a variety of applications, such as those that impact safety or are critical in terms of business, finance and security. NSL has carried out many successful GNSS research programs within the UK and internationally for government organizations, regulators and policy makers, Spirent said.
Martin Foulger (left), general manager at Spirent Communications, meets with Mark Dumville, general Manager of NSL, at NSL’s headquarters in Nottingham, UK. (Photo: Spirent)
The combination of NSL’s acknowledged expertise in the research of GNSS vulnerabilities with Spirent’s leadership in GNSS simulation and test development enables the provision of a range of planned robust positioning, navigation and timing (PNT) solutions.
“Threats to GNSS and related PNT applications are becoming more orchestrated and coordinated, with the motivation to disrupt or cause financial loss becoming the driving factor,” said John Pottle, marketing director at Spirent’s Positioning division. “Real-world threats are wide-ranging and affect navigation and timing system performance differently. Our partnership with NSL enables not only detection, but also regeneration, of real threats in the lab. This allows users to understand which threats are most relevant to them, and informs decisions on improving robustness.”
“NSL and Spirent share a vision that building robust position, navigation and timing systems is enabled through evaluating system performance against a real threats baseline” Mark Dumville, general manager at Nottingham Scientific Ltd, said. “By auditing system performance, decisions on how to improve resilience can be based on facts, not guesswork.”
Wheeler Also Discusses Spectrum Incentive Auction on CTIA Stage
LA Times writer Jon Healey interviews the FCC’s Tom Wheeler in a fireside chat at CTIA.
As one of Super Mobility 2015’s first speakers, Federal Communications Commission (FCC) Chairman Tom Wheeler reaffirmed his support for the net neutrality rules that CTIA-The Wireless Association, the event’s host, has been fighting in court.
Wheeler harkened back to his speech to this same audience last year where he received a “less than thunderous response” to his suggestion that broadband should be classified as a public utility. Previously, the FCC had treated broadband as an information service separate from the telephone network.
“If you have that kind of a role in delivery of Internet, then you ought to be governed under a similar set of rules that apply to everyone and not have a wireless exception,” Wheeler said.
Net neutrality rules enacted by the FCC early this year prohibit mobile broadband providers from throttling Internet content and utilizing paid prioritization. CTIA filed a brief with the U.S. Court of Appeals in Washington, D.C., this summer in conjunction with other industry associations, opposing the regulation saying it could have “devastating impact on Americans and the U.S. economy.”
“Imposing Title II on wireless would be a gross overreaction that would interrupt the world’s best wireless industry and interfere with the significant innovations and competition consumers enjoy today.”
Wheeler disagreed on stage during a fireside chat with Los Angeles Times editorial writer Jon Healey. He pointed out the “tens of billions of dollars” the wireless industry has invested.
“I’m very bullish on the continued growth of this industry and the continued protection of consumers and how they use the net,” he said.
Wheeler said he was also “supremely confident” that the incentive auction for 600MHz of broadcast TV spectrum, scheduled to start March 29, 2016, would go off without a hitch and that broadcasters would be there and would agree to sell their spectrum rights. Don’t believe him? Take it from James Murdoch, new CEO of News Corp., he said.
“I told him I was going to be talking to you today, and I said, ‘Can I tell him you’re going to show up?’ and he said, ‘Yup,’” Wheeler explained to Healey. “We had a fascinating discussion about how the broadcast business has changed. The most interesting part of my conversation with…Murdoch was talking about innovation and need to be continually innovative. The broadcast auction offers incredible opportunities for broadcasters to get a pot of money to innovate with without losing the business model they’ve been successful with.”
KVH is a fiber optic gyro (FOG) manufacturer that controls every aspect of its fiber-optic technology — from drawing its own specialized polarization-maintaining fiber to building precision FOGs and FOG-based inertial systems.
KVH will be showcasing its FOG-based inertial measurement units (IMUs) at this year’s ION GNSS+ conference, taking place Sept. 14-18 in Tampa, Fla.
Many of today’s demanding applications require high-performance inertial sensors that provide consistent and reliable accuracy — and strike the right balance between performance, size/weight, power consumption, and price, KVH explained. The company offers three IMUs:
1775 IMU – Premium performance for critical applications
KVH will be at booth 516 in the ION GNSS+ Exhibit Hall.
Below is a video tour of KVH’s high-performance fiber-optic gyro manufacturing facility, which shows how precision, quality and accuracy are built into each KVH sensor.
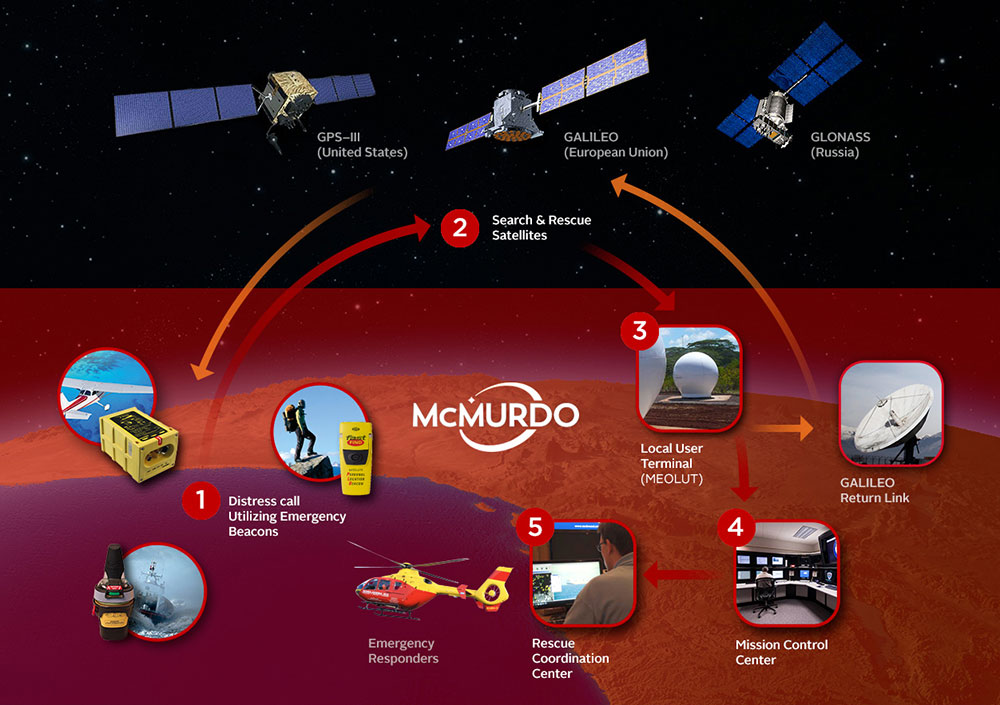
In a typical Cospas-Sarsat search and rescue process, a distress beacon signal is sent via satellite to a local user terminal. A mission control center validates the emergency and sends critical information to rescue coordination centers. MEOSAR, the next-generation version of Cospas-Sarsat, will provide several unique features including a return link service function to acknowledge receipt of the distress signal.
McMurdo has introduced PRISMA MCCNet, a new software solution with several new features to improve the Cospas-Sarsat satellite-aided search and rescue process, and for use in the future MEOSAR system. The software, which is part of McMurdo’s suite of PRISMA (Preparation, Response, Identification, Surveillance, Management, Acceleration) software solutions, provides mission control center (MCC) operators with critical tools to better identify, locate and manage distress situations.
In a typical Cospas-Sarsat search and rescue scenario, a distress signal from an emergency beacon is sent via satellite to a fixed ground receiving station or local user terminal. The nearby MCC confirms the emergency, analyzes location data and provides this information to the various rescue coordination centers for the actual rescue operation. PRISMA MCC’s improved functionality includes built-in system redundancy, unified communications and automated reporting to improve the MCC operation and streamline the search and rescue process.
The international Cospas-Sarsat satellite system is best known for detecting and locating emergency beacons activated by aircraft, ships and backcountry hikers in distress and has been credited with saving 37,000 lives since 1982. The system includes satellites in low-altitude Earth orbit (LEO) and geostationary Earth orbit (GEO). The future Cospas-Sarsat system will include medium-altitude Earth orbit (MEO), which will form the MEOSAR system. Satellites in the MEOSAR system include GPS, Galileo and GLONASS satellites, which are incorporating search and rescue payloads.
“PRISMA MCCNet provides Mission Control Center operators with a powerful, comprehensive and reliable software tool that provides the most accurate data and most up-to-date information to expedite the search and rescue process,” said Jacob Blankenship, search and rescue business manager for McMurdo. “With several advanced features and innovative functions based on our years of experience working with the leading search and rescue authorities around the world, the end result will be faster decision making and, ultimately, more lives saved.”
McMurdo’s PRISMA MCCNet software will help improve a Cospas-Sarsat satellite-aided search and rescue system that has helped to save 37,000 lives since 1982.
PRISMA MCCNet provides significant improvements in several key areas to enhance mission control center operations including:
High Availability with Support for Automatic Failover — PRISMA MCCNet includes new automatic failover and built-in redundancy features to maximize availability and uptime of the search and rescue system.
Unified Inbox and Communications — Easy to use and organize, PRISMA MCCNet’s Unified Inbox displays all actionable events that require operator interactions including beacon alerts, narrative messages, or system level alarms on a single screen. This information, which traditionally required the use of multiple screens, can be sent easily and reliably to rescue authorities via multiple communications protocols and redundant link transmission.
Advanced Monitoring and Reporting — PRISMA MCCNet’s built-in automatic diagnostic and analytical tools continuously detect, trace, and report malfunctioning components and processes. Quality Management System (QMS) analysis tools provide real-time tracking of system performance.
Client-Server Architecture — Unlike traditional MCC systems, PRISMA MCCNet is based on a secure and scalable client-server architecture allowing multiple MCC workstations to access consistent data and information from a centralized or distributed server configuration.
Commissionable LEOSAR/GEOSAR/MEOSAR MCC — PRISMA MCCNet was developed in close association with Cospas-Sarsat, National Oceanic and Atmospheric Administration (NOAA), NASA and other search and rescue authorities. This ensures a seamless commission/certification process for LEOSAR/GEOSAR/MEOSAR MCCs.
McMurdo’s PRISMA MCCNet software streamlines mission control center operations with features including built-in system redundancy, a unified inbox and advanced monitoring tools.
“The launch of PRISMA MCCNet is yet another milestone in McMurdo’s journey to become the global leader in emergency readiness and response,” said Jean-Yves Courtois, McMurdo CEO. “It provides a solid foundation upon which we can build a world-class, integrated ecosystem of products, technologies and services for preventing emergencies, protecting assets and saving lives.”
McMurdo provides the world’s only complete, end-to-end emergency readiness and response solution including distress beacons, search and rescue satellite infrastructure, mission control and rescue coordination centers and maritime domain awareness solutions including coastal surveillance and vessel monitoring systems. The world’s leading search and rescue authorities in the U.S. (NOAA and NASA), Australia (Australia Maritime Safety Authority), New Zealand (Maritime New Zealand), Cyprus, South Africa, Argentina and other countries use McMurdo search and rescue systems.
SBG Systems joins YellowScan to present a lightweight lidar with inertial and GPS for UAVs. The new product will be presented at the INTERGEO trade show in Stuttgart, held Sept. 15-17.
The YellowScan lidar is designed for fixed or rotary-wing UAVs, with an embedded Ellipse-E, a miniature inertial navigation system from SBG Systems, which helps obtaining a clear and accurate point cloud.
The UAV market is continuously growing, especially for professional applications like 3D surveying. Developed for such applications, YellowScan’s R&D team has worked closely with researchers and professionals in industries such as construction, surveying, mining and natural resources to create a comprehensive, high-performance and easy-to-use LiDAR.
Ellipse-E. The ready-to-use YellowScan is operational at up to 75 meters and delivers a highly dense point cloud accurate to 10/15 centimeter. The solution includes a lidar with a ±50 degree angle that measures 40,000 points per second, an Ellipse-E inertial navigation system coupled with a centimeter-level RTK GPS, an on-board computer, and an integrated battery.
The Ellipse-E miniature inertial navigation system by SBG Systems.
Once mounted on the drone, the user pushes the yellow button and YellowScan is ready to survey. LED lights give useful information on YellowScan state, for instance if the GPS is receiving RTK corrections or not. The user can launch the UAV and begin the survey. Once the task accomplished, a USB stick is used for downloading the data. An office software visualizes the point cloud in a few clicks, before opening it in an industry specific software like Terrasolid, AutoCAD or ESRI.
The YellowScan research and development team was searching for a high-performance, light and ITAR-free inertial navigation system for motion compensation and data georeferencing. They tested the Ellipse-E, the new miniature inertial navigation systems from SBG. Weighting 12 grams as an OEM version, it provides roll-and-pitch data accurate to 0.2 degree. The heading is accurate to 0.5° with only one antenna. Indeed, the heading computation relies on GPS and accelerometers data. This method is used when GPS positioning is widely available and punctuated by frequent accelerations, such as turns. The R&D team found the test results satisfying, and a point cloud highly clean. “We are very satisfied with this little Ellipse-E. It perfectly matches our technical needs, and we even gained 5 percent on the total weight of the YellowScan,” said Tristan Allouis, CTO at YellowScan.
Ellipse-E Coupled with External GPS Receiver. The Ellipse-E inertial navigation system is able to connect to any survey-grade GPS receiver and to fuse in real-time GPS position with inertial information. Ellipse-E maintains a reliable position even if GPS masks occur. In this application, the Ellipse-E is coupled with the AsterX-m OEM card from Septentrio, a receiver that uses GPS and GLONASS constellations and works with all types of RTK reference stations.
At INTERGEO, YellowScan will be in booth # F8.014, and SBG Systems will present the Ellipse-E at booth # G4.079.
How the Internet of Things Now Drives Location Technology
The number of devices connecting to the Internet is growing fast. The applications running on them require location context to determine the most likely use case. These devices need continuous location — not necessarily noticed or activated by the user, but always on. The specification that becomes important is energy per day: the device must maintain its location without draining its battery — and increase location availability indoors. That creates new design requirements for hybrid capability.
By Greg Turetzky
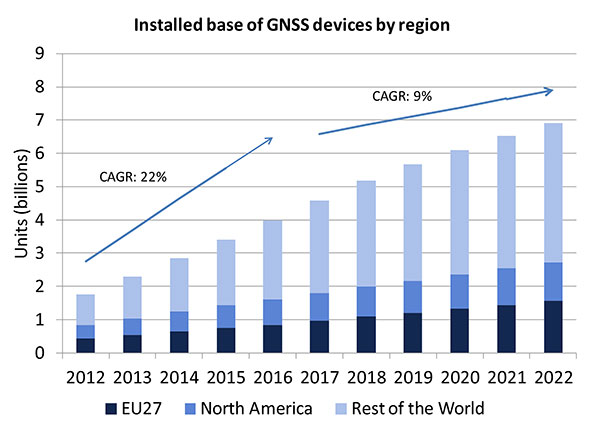
A lot of people have the opinion that the GNSS market is kind of flat. Actually, several different market studies would indicate that it’s not as flat as you would think. See FIGURE 2, taken from the European GNSS Agency’s (GSA’s) 2015 GNSS Market Report. The growth rate certainly is slowing, but any market that continues to grow at a 9 percent annual growth rate is a very nice target area. As you can see, the GSA expects that we’re going to have somewhere in the neighborhood of 7 billion devices within the next eight to ten years.
Figure 2. Installed base of GNSS devices by region; the GNSS market continues to grow at a rapid pace. Source: GSA GNSS Market Report.
We’re getting to the point where the number of GNSS receivers exceeds the population of the planet, which makes for an interesting thought process as to where GNSS is going to end up, and how it’s going to have to end up in everything that we do. That makes for a nice market opportunity. A big reason for that is we’ve seen a lot of growth in demand for multi-constellation GNSS. Everything pretty much has GPS in it that everyone terms as GNSS, but the growth of these other constellations is happening relatively quickly.
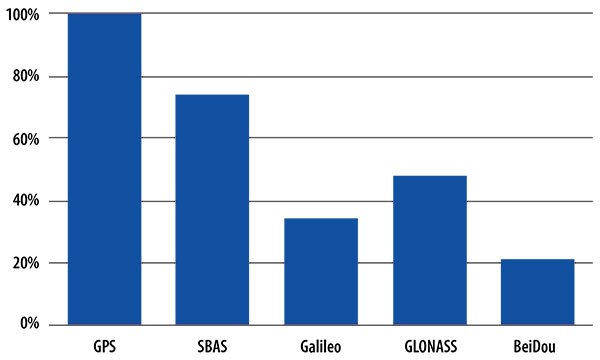
FIGURE 3, in my opinion, is already significantly out of date, even though it is less than a year old. Other market estimates indicate that GLONASS penetration into receivers, especially in the mobile phone field, is closer to 70 or 80 percent today, and that is expected to grow. There’s really no technical or economic reason why GNSS receivers can’t support multiple constellations, even at the consumer mobile device level.
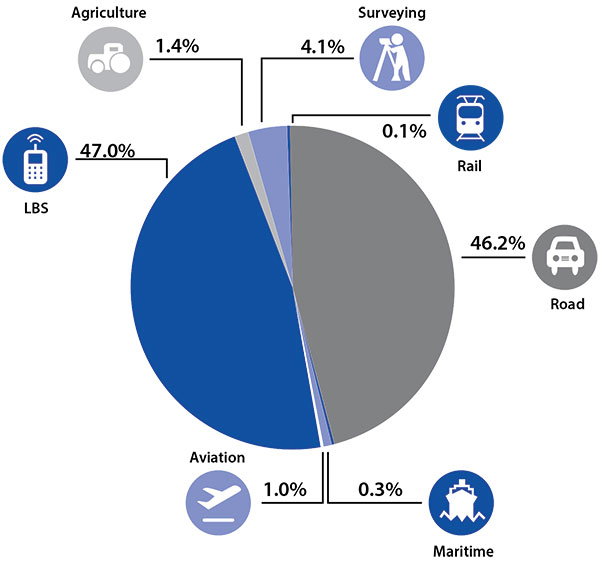
Once all those constellations are in place, let’s look at where those receivers are going from a market standpoint. FIGURE 4 is divided by revenue, which is an interesting way to do it because we all know if you divided it by actual units, then the location-based services (LBS) portions in phones would dominate everything; everything else would just be a sliver that wouldn’t be visible. But if you look at it from a revenue standpoint, there are still many revenue opportunities in the phone segment and in the automotive segment.
Another reason to expect continued market growth is, if you examine Figure 4, you’ll notice that the Internet of Things (IoT) category (see SIDEBAR) doesn’t even show up here. We’ll see going forward that there will be a new slice of pie showing a focus on that segment and those types of applications.
Intel and the Internet of Things
Intel’s mission is no longer only to build PCs. We’re about bringing smart, connected devices to everyone. That encompasses a range of products, and we’ve been expanding our portfolio appropriately.
We start with everything from big iron data centers (which are part of smart devices) to mobile clients and all the way down to the Internet of Things (IoT) and wearable devices. All those devices are part of this smart connected world. Our group’s job is to help on the connectivity side, which varies by product.
This whole idea expands beyond mobile phones and into the IoT, a big trend whose methodology is transforming business, starting at sensors all the way up to big data, to make interesting decisions. The number of devices that are being able to connect to the Internet is growing faster than anybody can keep up with, and that creates a really interesting opportunity. That gives you a bit of a picture as to why Intel is interested in this market and where you’re going to see us playing.
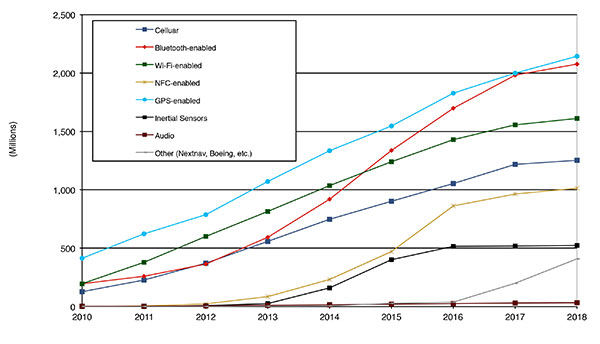
Looking at how we provide this location capability beyond just GNSS, how are people determining their location in these different platforms, and what are the different technologies available? FIGURE 5 shows that in 2014–2015 the most popular technology is still GPS, but there is a fast-growing trend in both Bluetooth-enabled and Wi-Fi-enabled penetration of location technology. Both of these are more suited to indoor operation, where the market is still in its early stages.
Figure 5. Alternative location technology shipments, world market forecast: 2010–2018. Source: ABI Location Technologies Market Data.
Although GNSS continues to grow with market growth, the growth of other technologies and the ability to incorporate them into location solutions is growing pretty quickly, and the radio versions of those are, in general, growing the fastest, followed by the inertial sensors. I think we’re going to see this combination of location technologies, jointly providing a single answer, becoming the norm in mobile products.
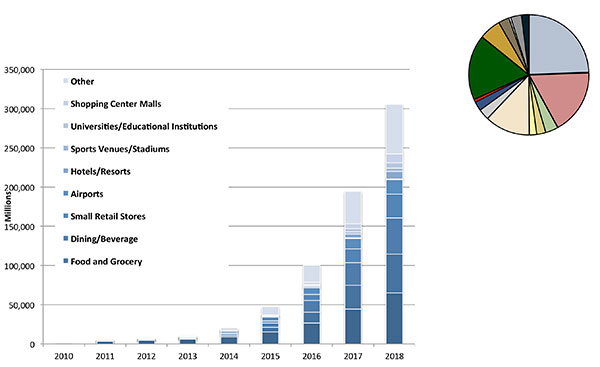
These technologies are going to end up, especially for indoors, in different areas. FIGURE 6 shows a huge growth, not only growth but segmentation among a bunch of different types of venues, all of which seem to be adopting an indoor location methodology. Not all of them will adopt the same one, but all these types of venues are looking at that market and are looking at potential different technologies to serve their needs. What might be most appropriate in a grocery store — geared towards finding a particular item — like a Bluetooth beacon might be less interesting in an airport, where there’s still a need for navigation from place to place, where proximity is not necessarily the right answer.
Figure 6. Indoor location technology installations by vertical market, world market forecast, 2010–2018. Source: ABI.
We see a large growth of a very disparate technology base; at the right of the figure is a pie chart where I had to remove all the callouts, the list of all the different technology suppliers addressing these particular indoor markets. What you see is a highly fragmented supplier base; that’s very consistent with an early market implementation. There’s a lot of different people attempting to get into this market with a lot of different solutions. This is pretty classic for an early-adopter scenario.
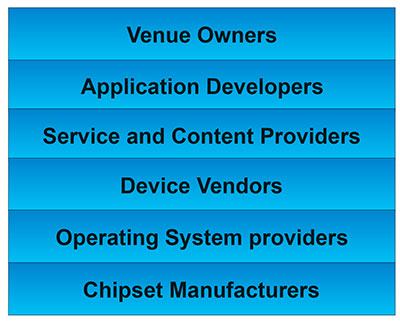
The Stack. Changing accuracy requirements will come up a bit later in this article. Once we’ve looked at where those different venues are from a requirements standpoint, we start to look at the types of companies that are trying to participate in the ecosystem required to do that (FIGURE 7). If you start from the bottom, where I live as a chipset manufacturer, and you move up the chain, you see seven different layers of people in the creation of a location to the end user, especially indoors. And every single person you see in this value chain is trying to make money.
Figure 7. LBS value chain: a highly complex ecosystem with each segment looking to differentiate and monetize indoor location. Source: GSA GNSS Market Report.
That’s the crux of the issue: a lot of people want a piece of that pie, and all of them have a relevant part to play, but when seven people in the stack are all trying to own the location result in order to monetize it, it becomes difficult to create a unified methodology. I live at the bottom of this complex ecosystem, in the technology implementation layer. Getting dollars to flow from the top to the bottom gets relatively difficult, so we are very driven to bring cost competitiveness into this market.
In summary, from a market standpoint, we see that the market opportunity is very big and still growing. This makes it interesting to a company like Intel, even though we aren’t a major player in the business today, to continue to invest in it. We see a trend going from GPS to GNSS and on to location, and now the big opportunity is indoor location. But this indoor-location market is not a stand-alone device opportunity. Indoor location requires this kind of technology inside other devices, inside phones and tablets and IoT types of things.
Context. Let’s look at indoor location as a feature in a larger portion of product. That idea comes from the requirement for location not just for the location itself, but in order to provide context. That’s critical because now these smart, mobile devices are not just used to make phone calls, but are used all the time. As a result, many applications running on them really require that location context to determine the most likely use case that the device is currently operating, making the consumer experience easier and more natural. This is evident throughout the entire value chain from phones and tablets to wearables. If you think about that from a requirement standpoint, you see the major places where GNSS has enabled trend changes in the market.
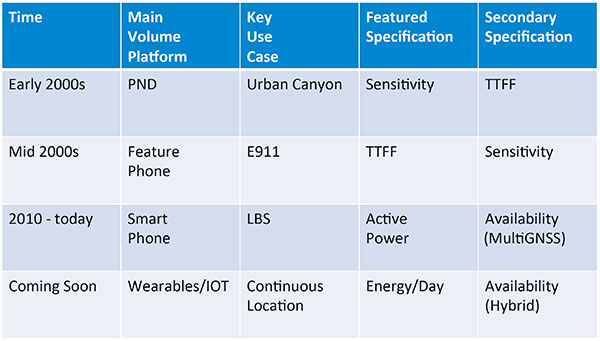
Let’s step back a bit in history to go through FIGURE 1, the opening figure, horizontally. In the early 2000s when I was at SiRF Technology, the main market drivers were personal navigation devices (PNDs). There were all these dashboard-mounted PNDs, and the main things we were trying to fix was the urban-canyon problem. GPS always worked well in the rural areas but always had trouble in urban canyons; to fix that, we had to improve the sensitivity. The solution in that timeframe was with multi-correlator designs and improved RF frontends; we were able to improve the sensitivity of the receivers by a good 5–10 dB, which enabled us to really keep the antennas inside the car so that there was no need for roof-mounted antennas. The PND could be mounted on the dash and work just fine. That was a big factor in improving the user experience. The secondary specification that enabled that market to grow quickly was time-to-first-fix; those devices had to power-up and work fast to prevent user frustration.
Within about five years, however, the PND market was overtaken by growth in the feature phone market. The reason for that was the FCC E911 mandate; everyone had to figure out a way to make sure that phones sold in the United States had the ability to meet that 911 mandate. GPS was one of the major methodologies in meeting that, and the main driver there was not around sensitivity, it was improving first-fix times. The mandate required a 30-second TTFF implementation in a very challenged environment to support emergency-services dispatch. This led us to the development of assisted GPS (AGPS) and further integration into phones. We had a secondary requirement of continuing to improve the sensitivity, because now we had to deal with an even worse antenna in a handset.
Once that was taken care of in the mid 2000s, the next thing we saw coming — and what’s coming now — is the change in GPS requirements for smartphone navigation. This comes from the huge growth of higher end smartphones that are running multiple applications driving the use-cases around LBS. How will the location be used to provide services, now that we can provide applications on that platform? Now the most important specification has become active power? Every time a GPS receiver is turned on for use in an LBS mode, you have to make sure that the power consumption is kept to a minimum, or no one will use those services. So the active power of the device became a very important specification that we were all trying to improve.
The secondary specification we had to improve was the availability. This is where the advantage of multi-GNSS started to show up — using handsets for car navigation on Google map types of implementations. So the performance of smartphone navigation in the urban canyon became a big driver recently as the main use case.
Impacts of New Requirements on Silicon Design
Standby power reduction impacts
SRAM is the leakiest component of typical design
Needs to be reduced or ideally eliminated
Non-continuous fix methods
Ability to quickly save and restore state information
Hybrid location solutions
Support measurements from multiple radios
Need to share radios, not duplicate chains
Increased integration of of multiple radios on single die
Need more interference rejection capability
Ability to support concurrent radio operation on single die
Next! What’s coming next is the idea that these wearables and IoT platforms are not just doing LBS on demand because of the currently active application. They are going to need continuous location. The device needs to provide location capability all the time, but it’s not necessarily going to be noticed by the user or activated by the user, so the specification that becomes important is energy per day. You want to make sure your device can maintain its location without draining its battery. Then we are also going to have to increase the availability of location into indoors to really fix this whole problem. And that will really move us into hybrid capability.
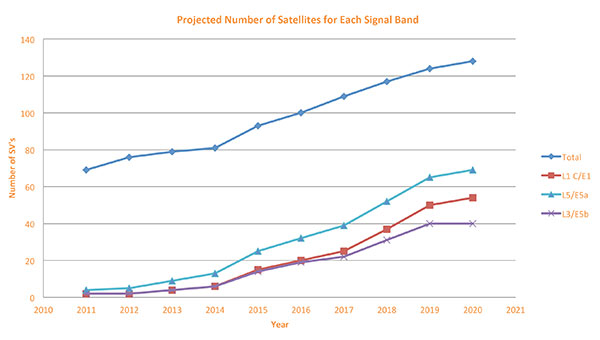
If we look at those changes in the market and we look at how they’re going to impact the GNSS architecture, the first thing we want to look at is: Where is GNSS? FIGURE 8 is a plot that I’m sure everybody has and is hard to keep up to date. It looks at the satellites coming from the different satellite constellations. The important thing here is that we are approaching a timeframe where a significant uptick in the growth of satellites can send the numbers over 100. That can really have an impact on receiver design, if you’re building a multi-GNSS receiver and you have to deal with a hundred satellites. How are you going to do that?
Figure 8. Projected number of satellites for each signal band.
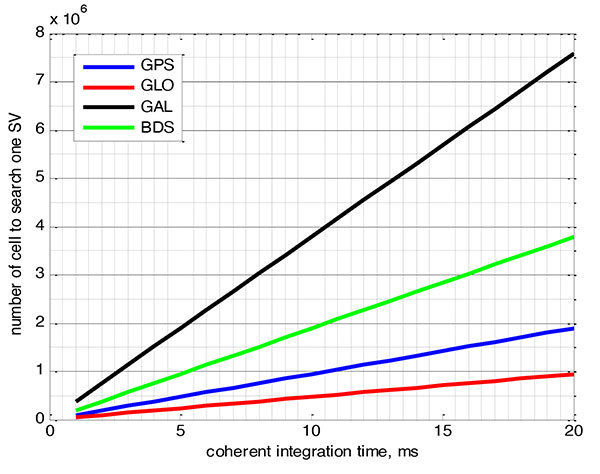
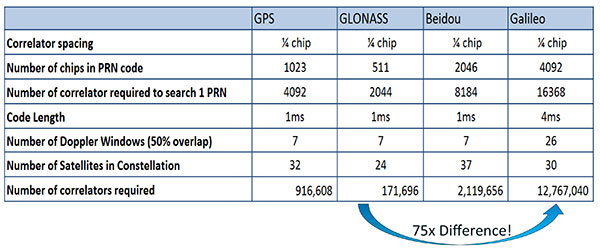
FIGURE 9 shows the relationship between the coherent period and the number of correlators required to search for one satellite in each constellation. We looked at particular scenarios — in this case, let’s say we are trying to do an outdoor location, so –130 dBm cold start test (FIGURE 10) with an initial frequency certainty of around 1 part per million (ppm). We wanted to look at the impact of the different constellations on doing that, and what it takes inside of the receiver to implement it. I’m not going to go into great detail here. But looking at those impacts in correlator counts, you can see the difference between building a GPS receiver that can do this and building a Galileo receiver that can do this. From the simplest one, that is, GLONASS, and from the most difficult one, which is Galileo, you see a 75x difference in the number of correlators required to do that, based on signal structure. This would indicate that, maybe from a cold start fix point of view, you might prefer a GLONASS implementation, and do GPS or Galileo later.
Figure 9. Relationship between the coherent period and number of correlators requried to search for one satellite in each constellation. ±1 ppm local oscillator frequency uncertainty; ±10 kHz Doppler shift range; 50 percent Doppler bin overlap; 1/4-chip correlator spacing.Figure 10. Test scenarios, cold start test.
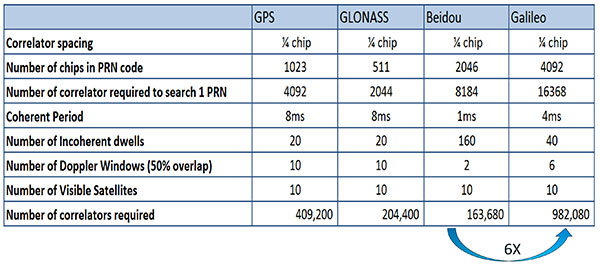
If that specification was your primary concern, then you would look at how those requirements got implemented into those devices. In addition, you try to come down to these low levels of power consumption, maintain sufficient accuracy to support these applications, and be able to move this into a very small form factor. If we look at the relationship between the number of correlators required to search for each satellite and amount of silicon area that requires, we see a big difference in the growth of those, depending on which constellation you look at. But if you look at a hot start scenario (FIGURE 11) rather than a cold start and at a weaker signal level, which is the more common implementation in devices today, you see a different result. With an improved starting condition because we have better information on the oscillators and reduced other uncertainties producing a smaller search space, the silicon area impact is greatly reduced. Then we have to really look at reducing standby power. That means we need to look at static random-access memory (SRAM) because SRAMs are a horribly leaky component and create very large standby power, but they are what we’ve been using for years in the standalone GPS world.
Figure 11. Test scenarios, hot start test.
We also have to look at non-continuous fix methodologies: this idea of turning things on and off to save power, which relates back to the standby power issues. We also have to look at hybrids: How are we going to support measurements from multiple radios like Wi-Fi and Bluetooth that are becoming important for indoor location? How are we going to share those radios without just pasting them together? That involves integration onto single die, and looking at what happens on the silicon level, and at what happens when you try to run radios at the same time.
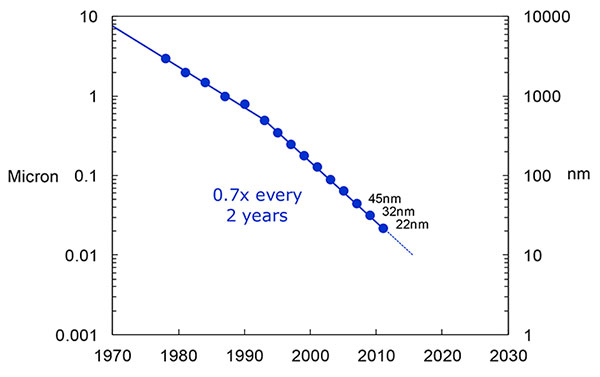
What we have to work with, especially here at Intel, the home of Gordon Moore, is Moore’s Law. It is still working 30 years after it was proposed. Recently, we see that we are tracking this progression of constantly reducing device sizes and moving forward. The dates in FIGURE 12 are for the process technology nodes associated with a classical digital process. We are not at the 22-nanometer level today on GPS receivers, but we are moving down that curve.
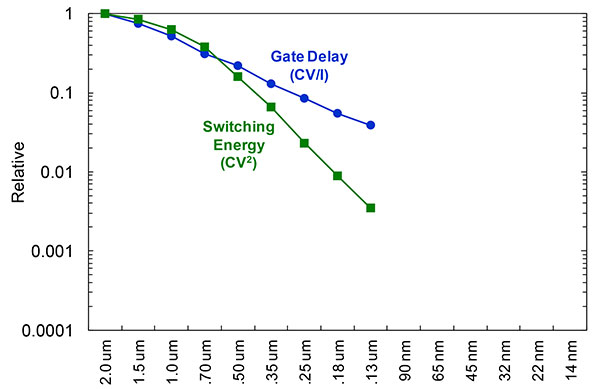
Figure 12. Moore’s Law in action: transistor scaling and improved performance. In GNSS terms, this means more gates and more memory for less cost, improved TTTF and sensitivity by allowing more search capability.Figure 13. Scaling also increases speed and reduces power. HIgher clock speed provides better search and more complex navigation algorithms.
Obviously, when you move down that curve, you greatly increase your ability to add more gates to improve TTFF and sensitivity. More correlators help you search out more uncertainty faster. The other thing this does is allow us to run faster, to up the central processor unit (CPU) clockspeed. This allows more software capability to do things like process more advanced navigation algorithms, bring in more satellites from multiple GNSS, run very expansive Kalman filters, and look at hybrid technologies. It has also driven down the power, so that reducing the active power requirement that we had was kind of coming along with Moore’s law without a whole lot of effort.
But now we’ve run into a problem: the parameter that we care more about, standby power, is actually going up. Although we are getting benefits out of Moore’s Law from speed and active power, we are actually having a problem. It’s increasing our standby power, which makes it difficult to go to these lower fix rates with faster restarts.
You see a trend here. As you move down in technology nodes, you find that the more advanced technology nodes are less applicable to the smaller multi-purpose devices. This is part of the reason why you don’t see the mobile phone devices coming down as fast as you see the desktop devices coming towards those new technology nodes.
This means some really significant silicon design challenges. We need to figure out how to take the advantages of Moore’s Law and maintain the benefits of smaller geometry, we need higher clock-speeds, and we need more memory for multi-constellation methodology and that gets lower active power and smaller size.
But we have to figure out a way to not give up our standby power when we start moving down into these very small geometries. That will require some new methodologies, both at the chip level in terms of how we build silicon, and at the system design level, in terms of how we put these things together inside a mobile phone.
What Intel Is Doing
I can’t tell you what we haven’t done yet, but we look at location as an opportunity where the strength of Intel comes into play. We have very advanced silicon processors and we are bringing those to bear on the location technology problem — just starting in the last few years. Our goal is to provide a GNSS and location silicon solution with best-in-class performance based on Intel technology. Once we’ve done that at the silicon level, we’ll look at bringing the platform-level integration capability together.
We have the ability to merge multiple location technologies. We have a platform-level capability to integrate hardware and software to solve the indoor location problem on a variety of platforms. To execute to Intel’s vision, we’re going to push this into a ubiquitous technology present in all these devices, so that we can improve the variants on these mobile products.
Multiple Radios. That’s part of what’s driving the whole industry towards the kind of consolidation that we’ve seen: stand-alone chipsets are not the only (or even the preferred) way to solve this problem. Without some access to the system design level, we’re not able to solve this problem for mobile phones and IoT type devices. We’re going to see this trend — that we all see coming — of putting multiple radios onto a single die, because that does reduce cost and size as we try to get into watches.
The 2015 Consumer Electronics Show brought out the new stuff. They’re talking about IoT buttons. We still have a ways to go; bringing that capability down to that size in a GNSS radio is a difficult problem. Once we start incorporating these different radios, such as Wi-Fi and Bluetooth, into this solution, we run back into the problem of the value chain: How to get everyone aligned in a device with these capabilities into a single unified solution?
One of the problems a lot of us see with these mobile products is that they have a lot of application and they require a lot of interaction. We’d all like these devices to become smarter and present the information that we want, when we want it. A big part of that is the location context, and so that’s what we’re planning on doing: integrating that location context into all these platforms so that these smart connected devices can be even smarter and provide a better user experience.
GREG TURETZKY is a principal engineer at Intel responsible for strategic business development in Intel’s Wireless Communication Group focusing on location. He has more than 25 years of experience in the GNSS industry at JHU-APL, Stanford Telecom, Trimble, SiRF and CSR. He is a member of GPS World’s Editorial Advisory Board.
The statements, views, and opinions presented in this article are those of the author and are not endorsed by, nor do they necessarily reflect, the opinions of the author’s present and/or former employers or any other organization with whom the author may be associated.
This article is based on a GPS World webinar, which sprang from a presentation at the Stanford PNT Symposium. Listener questions and Greg Turetzky’s answers during the webinar, which can be read here.
The author would like to acknowledge the contribution of Figures 9, 10 and 11 from the paper “Optimal search strategy in a multi-constellatoin environment” by Intel colleagues Anyaegbu et al, from ION GNSS+ 2015.
Telit’s Jupiter SE873 GNSS receiver with flash memory.
Telit has introduced the Jupiter SE873, a GNSS receiver in a 7 x 7 x 1.85 mm module with serial quad I/O flash memory, an integrated low noise amplifier, SAW filter, TXCO and real-time clock.
The new addition to Telit’s GNSS portfolio is a complete multi-constellation position, velocity and time engine that the company says delivers versatile performance in harsh environments.
The Jupiter SE873 supports Assisted GPS (both autonomous and server-based) plus Satellite Based Augmentation System (SBAS), which improve Time-To-First-Fix and position accuracy. AGPS data is stored in flash memory and is available even after all power has been removed and then restored. This is especially important for battery-operated equipment, Telit said.
The SE873 is a high-performance, high-sensitivity product that supports the entire GNSS spectrum: GPS, GLONASS and BeiDou, and it is Galileo ready. It delivers simultaneous low-power tracking of GPS and GLONASS or GPS and BeiDou. In the future, users will be able to add new functionalities.
“The SE873 outperforms all its competitors, most of which are ROM based. Employing flash memory results in a module that packs a lot of functionality into a small footprint,” said Felix Marchal, CPO of Telit.
Telit Jupiter SE873 is being presented to the market at Telit DevCon 2015 Sept. 8 and CTIA’s Super Mobility Week in Las Vegas Sept. 9. Telit DevCon is a one-day event that takes place the day before CTIA Super Mobility 2015 and is located close to the Sands Expo and Convention Center in Las Vegas. Visit Telit at booth #5032 during CTIA Super Mobility 2015.
This year’s Intergeo host city, Stuttgart, offers interactive city maps packed with geoinformation in an effort to become a “smart city.” Founded in 2001, Working Group Geoinformation Systems of Stuttgart (GIS AG) has evaluated environmental and traffic issues, sustainable urban development and solutions for a climate-friendly energy supply. Intergeo 2015 is being held Sept. 15–17.
Stuttgart is growing, according to a news release from Intergeo, and will continue to do so for the foreseeable future as newcomers flock to the region’s urban capital city. The number of inhabitants in the region has increased from 2.4 million in 1990 to 2.7 million today, Intergeo officials said.
Stuttgart authorities have forged action plans addressing mobility, energy and a sustainable living environment, “and we lay the foundation for each of these spheres,” said Markus Müller, head of the geoinformation and cartography department at the City Surveyor’s Office.
Müller wants to see Stuttgart’s immense GIS data put to the widest possible use, according to the news release. He believes that the move towards the “intelligent city,” also known as a “smart city” or “city of tomorrow,” is only a matter of time.
Intelligently Networked
Stuttgart’s geoinformation and cartography department is frequently called upon — whether it’s for a simulation of the different planning options for a new city headquarters in the heart of the city, long-term monitoring of the building works related to the Stuttgart 21 infrastructure project, implementing traffic concepts in the congested regional capital or planning affordable living.
Stuttgart Aims for Dynamic, Interactive Maps
Müller and his team are on a mission to bring geoinformation into wider circulation and further optimize the local authorities’ workflows. They plan for a perfectly tailored geographic information system (GIS) for professional administrators, as a public information tool and as an increasingly important preparatory aid for political decision-making.
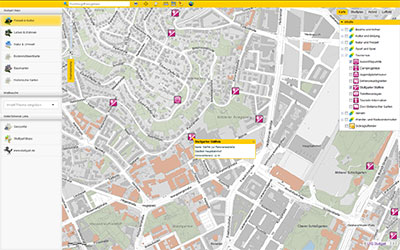
GIS-AG was founded in Stuttgart in 2001 to accomplish that task, and it now encompasses 15 specialist departments and municipal enterprises, according to Intergeo. Visit Stuttgart’s city website [click here for English] to find geoinformation — the city map alone covers about 70 subject areas, such as nature and the environment, leisure and culture, mobility and traffic, and planning and construction.
“The city map scores a lot of hits, probably also due to its accessibility on all platforms,” Müller said. The city map is just one piece of the puzzle in the ‘Stuttgart Maps’ project, which is aimed at making geographical information increasingly accessible to the public. The idea is to offer more and more data and to construct dynamic, interactive maps from the city plans in order to make the city truly intelligent.
Photo courtesy: Alen Ajan / Fotolia.com
Sensor and Real-Time Data
“The automatic capture of sensor data and the visualization of real-time data will continue to increase as intelligent cities develop,” Müller said.
In relation to energy, this could mean interactive evaluation and visualization of the potential uses for waste-water heating, or dynamic representations of the city’s energy consumption or heating requirements. Traffic flow could be visualized and the spread of emissions depicted.
“Once the foundation has been laid, ways can be found to optimize these systems and manage their success,” Müller said.
Photo courtesy: Alen Ajan / Fotolia.com
Smart City Hamburg?
Intergeo’s host city for 2016, Hamburg, is already seeking intelligent concepts for the cities of tomorrow — just like those already in use in Berlin, the host city for Intergeo 2017.
GIS AG will be at Intergeo, stand C8.025 in Hall 8, with 10 departments and municipal enterprises from Stuttgart’s public authorities showcasing innovative applications and solutions using GIS.
Anticipating New, Different Application and User Needs
Users in emerging applications may have different requirements from traditional high-precision users. New users increasingly look to the technology not solely for position, but to navigate them through the environment, often autonomously or semi-autonomously. Tracking all of the new multi-GNSS signals, and then using the large number of inputs in the positioning engine, drives the amount of processing power and memory required onboard the receiver. These in turn drive the cost, size and power consumption of the receiver in exactly the opposite direction from the expectations of customers.
By Jason Hamilton
In considering the future of high-precision satellite navigation, we need to consider what users of the technology are trying to accomplish, and which growing and emerging applications will drive adoption of GNSS technology in the future. These applications will drive growth in our industry if we can correctly anticipate their future needs.
Traditional applications of high-precision GNSS are well understood, but what these customers have demanded from GNSS can be at odds with what users in emerging applications require. Survey and mapping users were early adopters of high-precision GNSS and remain large user segments. Surveying with GNSS requires the very best accuracy that GNSS can achieve. Every centimetre of accuracy matters. Power and size are important product attributes to survey manufacturers. Mapping customers increasingly are asking for not just position, but orientation of a camera or other sensors.
Once accuracy challenges were well in hand, the topic of availability came into play. It was no longer good enough to have an accurate position in open-sky situations. Applications demanded continuous positions that were accurate in more and more corner cases and challenging environments.
In addition to using GNSS to measure location in an environment, new applications are increasingly looking to the technology to navigate them through the environment — often autonomously, or semi-autonomously. For these users, whether operating on a farm, in a mine, on the ground, or in the air, position accuracy is only part of the requirement. Solution accuracy of course matters, but other receiver attributes such as real-time quality control and solution integrity monitoring, are equally or more important.
Multi-constellation, multi-frequency GNSS provides tremendous opportunity and also presents significant challenges for receiver manufacturers. Constellation and frequency support has previously been a differentiator among high-precision GNSS providers, and among product generations. The relative stability of the satellite constellation definition means that the signals broadcast from space will be relatively predictable for some time into the future, and as such, GNSS products are increasingly supporting “all in view,” the ability to track everything that is broadcast.
The benefits of more satellites, more frequencies (and resulting frequency combinations) and modern signal structures have been well publicized. As new and modernized GNSS constellations come on line, they will deliver more robust positioning in increasingly challenging environments such as urban centers, open-pit mines and under tree cover. We will be able to account for atmospheric effects more accurately, which will help during times of high ionospheric activity and extend the length of RTK baselines. Users have a great deal to look forward to from their next-generation receivers.
All of these improvements necessitate pretty dramatic changes in receiver design. Tracking four global constellations and numerous regional SBAS systems increases the complexity of tracking and positioning firmware and algorithms. Tracking multiple frequencies and signal types on each of these constellations drives the receiver channel count up substantially. The days of the 12-channel receiver are gone. Channels, typically implemented within the manufacturers’ custom chips, drive application-specific integrated circuit (ASIC) complexity, which drives cost, power consumption and physical size. Some of this can be mitigated through the use of smaller process geometries, embedded processors and peripherals, and RF chip integration; however, there are down-stream effects to all of these signals as well.
Challenges
Once your receiver has enough ASIC channels to track all-in-view, you need to do something with all that data. The receiver’s tracking sub-system generates code (pseudorange), carrier-phase and Doppler measurements for every signal on each satellite. With four global and multiple regional constellations and up to four frequencies on each satellite, that amounts to a great deal of data. These measurements are what we turn into position, through a range of different positioning algorithms from code positioning to real-time kinematic (RTK) to precise point positioning (PPP). Tracking all of these signals, and then using the large number of inputs in the positioning engine, drives the amount of processing power and memory required onboard the receiver. These in turn drive the cost, size and power consumption of the receiver in exactly the opposite direction from the expectations of customers.
Bandwidth. Communications bandwidth is also a future challenge. Positioning methods, such as RTK, that transmit base-station observations for each GNSS signal to field rover receivers, will require much more bandwidth in the all-in-view future. PPP, which provides a state-space correction of the underlying GNSS error sources, is a promising alternative to RTK that scales better with more satellites than RTK and provides performance that is good enough for many applications.
Utilizing the multiple frequencies available from modern constellations also presents challenges to receiver designers. RF designers are faced with the opposing challenges of making GNSS receivers and antennas smaller, lighter and lower cost, while also supporting more GNSS broadcast frequencies and mitigating against increasing amounts of interference in the L-band RF spectrum from non-GNSS uses. Robust RF design makes the difference between a system that works most of the time, and a system that works reliably all of the time.
Expectations
If we now come back to the expectations of end users, the challenges are clear. Most customers actually don’t care about all-in-view tracking, how many satellites are tracked, or about what the receiver is up to behind the scenes. Users will judge their GNSS receiver on whether or not they are receiving a position that meets the requirements of their application. Are they meeting their targets for accuracy, availability, latency, data rate, and does the receiver fit from a size, power consumption, regulatory and cost perspective? After a certain level, more observations do not make the solution more accurate or more robust. Manufacturers need to carefully manage the tradeoffs in their systems on behalf of users to produce the best quality position possible, while still meeting the customer expectations on all the other receiver attributes.
Sensor Fusion. Demands of new applications drive GNSS providers to consider more than just position. Most vehicle control applications require orientation information as well as highly accurate position. Multiple-antenna GNSS heading systems are becoming smaller than ever. Inertial measurement device technology is also evolving quickly. Miniature micro-electro-mechanical systems (MEMS) inertial sensors can now deliver performance that only a few years ago was exclusive to large, heavy, bulky systems. The integration of GNSS and inertial technologies has been well adopted in highly demanding applications like aerial and ground mapping. As the size, weight and cost of the technology continues to shrink, sensor fusion in many forms will become the standard for all machine control and autonomous vehicle applications.
Safety. This is a key consideration for system designers working on remotely or optionally piloted and autonomous systems. Position and orientation accuracy is important, but so, too, is assuring that the solution is right and can be trusted. The accuracy of the solution needs to be characterized in real time so that control systems can react as necessary to protect users on and around the vehicle. Often in these applications, accuracy can be traded off against the robustness and reliability of the solution. This presents new ways of thinking for firmware and algorithm developers who have focused for so long on solution accuracy.
Support. Lastly, let’s not forget having reliable supply of high-quality product, and expert customer service to back it up. As high-precision GNSS attracts new users in a range of new industries, they are less often geodesists or geomatics engineers. The products absolutely need to be easy to use correctly, backed up by complete and accurate product documentation and supported by world-class application engineers.
Jason Hamilton is vice president of marketing at NovAtel Inc. Since joining the company, he has held a number of research, development and product management roles. Jason holds a Bachelor of Science degree in geomatics engineering from the University of Calgary and an MBA from Royal Roads University.
PCTEL’s GPS/GLONASS high-performance asset tracking and synchronization helix antennas are now available commercially. The antennas capture the frequencies needed for GPS, Galileo and GLONASS satellite reception. This cross-compatibility allows global OEMs to use one standard platform to serve both European and U.S. markets.
PCTEL will display its new IP67-rated GEO-GNSS antennas and other mobile and GPS antennas Sept. 16-17 at ION GNSS+, Booth #416.
PCTEL uses its proprietary filtering design to allow wideband coverage while achieving superior out-of-band rejection, the company said. The small form-factor helix antennas will withstand harsh environments.
“Customers expect PCTEL to solve challenging problems,” said Rishi Bharadwaj, PCTEL’s vice president and general manager, Connected Solutions. “We designed PCTEL’s GEO-GNSS series for complex asset tracking and network timing applications.”
For more information about PCTEL’s GEO-GNSS helix antennas, visit the PCTEL website.
The 2015 State of the GNSS Industry Report reveals the results of our annual survey of GNSS professionals, covering the state of their business, the economic climate for GNSS products and services, driving market factors, the government’s role in funding and regulating, budgets devoted to R&D, the effects of jamming, and the “Issue of the Year.” Download the 2015 State of the GNSS Industry Report.