The European Navigation Conference (ENC) will be held April 15-17, 2014, in the World Trade Center in Rotterdam, The Netherlands. The conference aims at technology, innovation, and business in the PNT domain (positioning, navigation, and timing). The conference program is now available for review online.
Satellite navigation and positioning, using current operational systems like GPS and GLONASS, will be major topics. The conference will also highlight recent developments on emerging GNSS like the European Galileo and the Chinese BeiDou.
More than 100 presentations will be given at ENC GNSS 2014. Here are a few highlights:
Keynote speeches
Prof. Bradford Parkinson (Stanford University): Assured PNT – assured world economic benefits.
Prof. Erik Theunissen (Netherlands Defence Academy): So you think you are safe.
Invited lectures
Prof. Cathryn Mitchell (University of Bath): Space weather effects on GNSS.
Ignacio Fernández-Hernández (European Commission): The Galileo commercial service: current status and prospects.
Jaron Samson (European Space Agency): An introduction to interference in GNSS bands.
Prof. Peter Teunissen (Curtin University/Delft University of Technology): Multi-GNSS: combining GNSSs for precise positioning and navigation.
Prof. Frank Van Graas (Ohio University): Disruptive technologies and GNSS aircraft landings.
Prof. Qile Zhao (Wuhan University): Positioning performance and precise applications of Beidou navigation satellite system.
Special sessions
The European Space Agency will organize a dedicated session on Galileo IOV results.
Anwendungszentrum GmbH Oberpfaffenhofen (AZO) will chair the kick-off meeting of the European Satellite Navigation Competition 2014.
Prior to the conference, on April 14, there will be a Resilient PNT forum and a meeting of the European Maritime Radio Forum (EMRF).
DigitalGlobe, Inc., has launched a crowdsourcing campaign that will allow anyone to help look for the missing Malaysia Airlines flight MH370 by combing through satellite images for clues of its whereabouts.
The search drew so many participants on its first day March 17, that it crashed the company’s website, with 500,000 visitors wanting to help find the missing Boeing 777. Anyone can begin searching the satellite images, tagging anything that looks suspicious. Each pixel on a computer screen represents half a meter on the ocean’s surface.
The Longmont, Colorado, company said two of its commercial satellites have already collected images comprising roughly 1,988 square miles at the confluence of the Gulf of Thailand and the South China Sea, where the Beijing-bound aircraft mysteriously went missing on Saturday. The company is continuing to update the images to reflect new information about the search area provided by the Malaysian government.
To help, go to DigitalGlobe’s crowdsourcing website, Tomnod.com.
Spectracom has begun a program to develop robust application-specific testing solutions. The program fills what the company calls a technology and expertise gap in providing customers in a variety of industries the tools to perform more comprehensive qualification of their mission-critical systems. Examples of these industries include:
interference detection and mitigation (IDM) verification;
assisted-GNSS (A-GPS) validation,
hardware-in-the-loop (HIL) testing for automotive applications;
high-dynamic platform simulations for aerospace and defense (UAVs, UASs); and
precision agriculture/surveying testing via RTK/differential measurements.
“Our full featured platform of multi-GNSS simulation capabilities combine flexible hardware and user oriented software to deliver the functionality and user interfaces necessary for today’s demanding test scenarios,” said Spectracom CTO, John Fischer. “We understand, however, that even the most powerful tools often need something more to reduce complexity, increase productivity and ensure consistent, reliable results. Toward these ends we are excited to bring our extensive applications knowledge directly to our customers to design and deliver custom configurations and test systems that are unique to their applications.”
Today’s PNT applications combine data from a variety of receivers, sensors and other sources. Spectracom is designing its solutions to integrate simulated GNSS RF with all other data sources in the test system for true “hardware-in-the-loop” verification, the company said.
For instance, Spectracom’s new assisted-GNSS (A-GNSS) feature is designed to integrate with 3GPP/LTE testers to send “assistance data” directly to the device under test. The company takes a similar approach to testing RTK-enabled receivers with user-settable virtual base-station parameters.
“Spectracom’s value is to partner with our customers to ensure they have the ability to easily use GNSS simulation as part of a comprehensive PNT testing solution,” said Rohit Braggs, Director of Marketing and Strategy. “More testing in the lab enables faster time to market, at a reduced cost and increased reliability. We are asking developers of the most demanding PNT applications to put us to the test.”
In GPS World’s annual Simulator Buyers Guide, we feature simulator tools, devices, and software from six prominent companies. Also available as a downloadable PDF.
CAST Navigation
CAST-SGX GPS Satellite Simulator
The new SGX GPS satellite signal simulator from CAST Navigation provides the user with dynamic, repeatable GPS RF signals for use in the laboratory or in the field for a wide range of GPS applications. The SGX simulator is housed in a portable, lightweight, handheld enclosure measuring 7 x 11 x 3 inches and weighing just over 4 pounds.
The SGX replaces the CAST-SIMCOM simulator, a 17- inch, 50-pound simulator. The SGX is lightweight and portable, operates on AC or battery power, and features 16 channels of L1 C/A and P codes. Based on CAST’s technology that has been developed for use in the company’s larger military products, it is extremely accurate and repeatable.
The SGX is controlled via an intuitive touchscreen interface that allows the user to select, start, and stop scenarios, change screen views, and change satellite RF power levels while a scenario is running. Three test scenarios are delivered with the simulator.
XGEN Plus Scenario Generation Software. This optional software gives the user the ability to generate custom scenarios for use with the SGX. The software allows for complete control over GPS almanac, ephemeris, and all satellite error sources.
The user can select from a variety of vehicle types and simulate static or dynamic motion. The user may also employ antenna gain patterns and vehicle silhouettes if desired. The user may generate a trajectory by defining a total mission profile using a six-degree-of-freedom model. The new scenarios can be downloaded via USB port or SD card interfaces.
CAST has been in the GPS simulation and support business for more than 30 years, designing, developing, manufacturing, and integrating innovative GPS/INS simulators and associated equipment for government, military, prime vendor, and consumer markets.
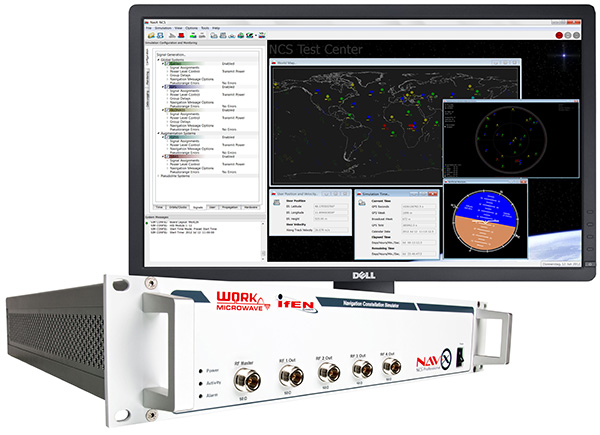
NavX-NCS Professional GNSS Simulator
NavX-NCS Essential GNSS Simulator
The absolute flexibility of the NavX-NCS Professional GNSS Simulator allows it to be configured with up to 108 channels and all of the following signals:
• GPS L1/L2/L5 C/A & P code and L2C
• GLONASS G1/G2 standard & high accuracy codes
• Galileo E1/E5/E6 (BOC/CBOC/AltBOC)
• BeiDou B1/B2
• SBAS L1/L5 (WAAS, EGNOS, MSAS, GAGAN)
• QZSS L1 & L1-SAIF
• IMES
The user is enabled to assign signals freely to any of the RF modules fitted to the simulator. This allows the same hardware to be used in a range of different configurations.
Signals may be added by software license with no need to return the hardware for upgrade.
Up to four independent RF outputs may be fitted, enabling the user to simulate multiple antenna locations simultaneously (allowing simulation of multiple antennas on one vehicle, multiple vehicles simultaneously, a mixture of static locations and mobile vehicles, and multiple antenna elements forControlled Reception Pattern Antenna [CRPA] testing).
The comprehensive and easy-to-use Control Center operating software allows the operator to quickly create realistic test scenarios for effective testing of user equipment.
IFEN also offers the NavX-NCS Essential GNSS Simulator, which is available with 21 or 42 channels and is capable of simulating GPS L1 (including SBAS L1), GLONASS G1, Galileo E1, BeiDou B1, QZSS L1, and IMES. The simulator is also supplied with Control Center operating software for comprehensive scenario generation.
LabSat 3, the latest generation of GNSS simulators from Racelogic, is a low cost, stand-alone, battery powered, multi-constellation, RF record and replay device designed to assist GNSS engineers in the development and testing of their products. With its small size and all-in-one design, LabSat 3 makes it easier than ever to collect raw satellite data in the same environment that end users experience in everyday use. This enables repeatable and realistic testing to be carried out under controlled conditions.
LabSat 3 doesn’t need to be connected to a PC to record live-sky GNSS signals. With one-touch recording to SD card and a two-hour battery life, it can be used in any outdoor location to create real-world scenarios, for eventual replay back in the lab. As well as recording GPS, GLONASS, BeiDou, QZSS, Galileo, and SBAS signals, it can simultaneously log CAN bus, serial, or digital data, embedded alongside the satellite information. This additional information can then be replayed alongside the GNSS output, with synchronization to within 60 ns. A 1 PPS signal can also be generated using the internal GPS receiver.
LabSat 3 can be used as a replay system out of the box with a set of pre-recorded scenarios supplied as part of the package, recorded from various locations around the globe. SatGen software, a free version of which is included with LabSat 3, allows for scenario generation of user-defined trajectories, with precise control over velocity, heading, height, and constellation profiles. Routes are also easily created in Google Maps, and the software also supports NMEA and KML file import. SatGen gives the test engineer the ability to develop a product using simulations that would be difficult or impossible to record due to geographic location or safety constraints.
LabSat 3 is available in four variants: replay only, or record and replay, of a single channel — one of GPS/Galileo/SBAS/QZSS, GLONASS, or BeiDou; and replay only, or record and replay, of dual channels — two of GPS/Galileo/SBAS/QZSS, GLONASS, or BeiDou.
LabSat is currently used by many leading manufacturers of GPS chipsets, portable navigation devices, smartphones, and by major car companies in their test, development, and production processes.
R&S SMBV100A: GNSS Simulator on Vector Signal Generator
Rohde & Schwarz extends the functionality of the R&S SMBV100A vector signal generator by adding BeiDou/Compass capability to its integrated GNSS simulator. With the R&S SMBV-K107 option, the GNSS simulator now covers the BeiDou standard as well as the GPS, Galileo and GLONASS satellite navigation systems.
The new option allows users to generate real-time scenarios with up to 24 BeiDou satellites. R&S SMBV-K107 supports all possible BeiDou orbits and can therefore even simulate satellites that are not yet in orbit. It also supports hybrid scenarios with GPS, Galileo, or GLONASS satellites. A software update makes it easy to upgrade existing GNSS simulators for BeiDou. No hardware modifications are required.
The R&S SMBV100A permits users to quickly define their own satellite scenarios to test GNSS receivers under diverse conditions. A wide range of options are available for simulating realistic effects such as signal obscuration and multipath propagation. These scenarios can now be configured for BeiDou as well.
This inexpensive solution is one of the few on the market that does not require an external PC for testing receivers and components of satellite-based navigations systems. In addition to GNSS signals, the R&S SMBV100A can simulate mobile radio, wireless, and radio standards, allowing users to test several functions with a single instrument.
The new R&S SMBV-K107 option is now available from Rohde & Schwarz.
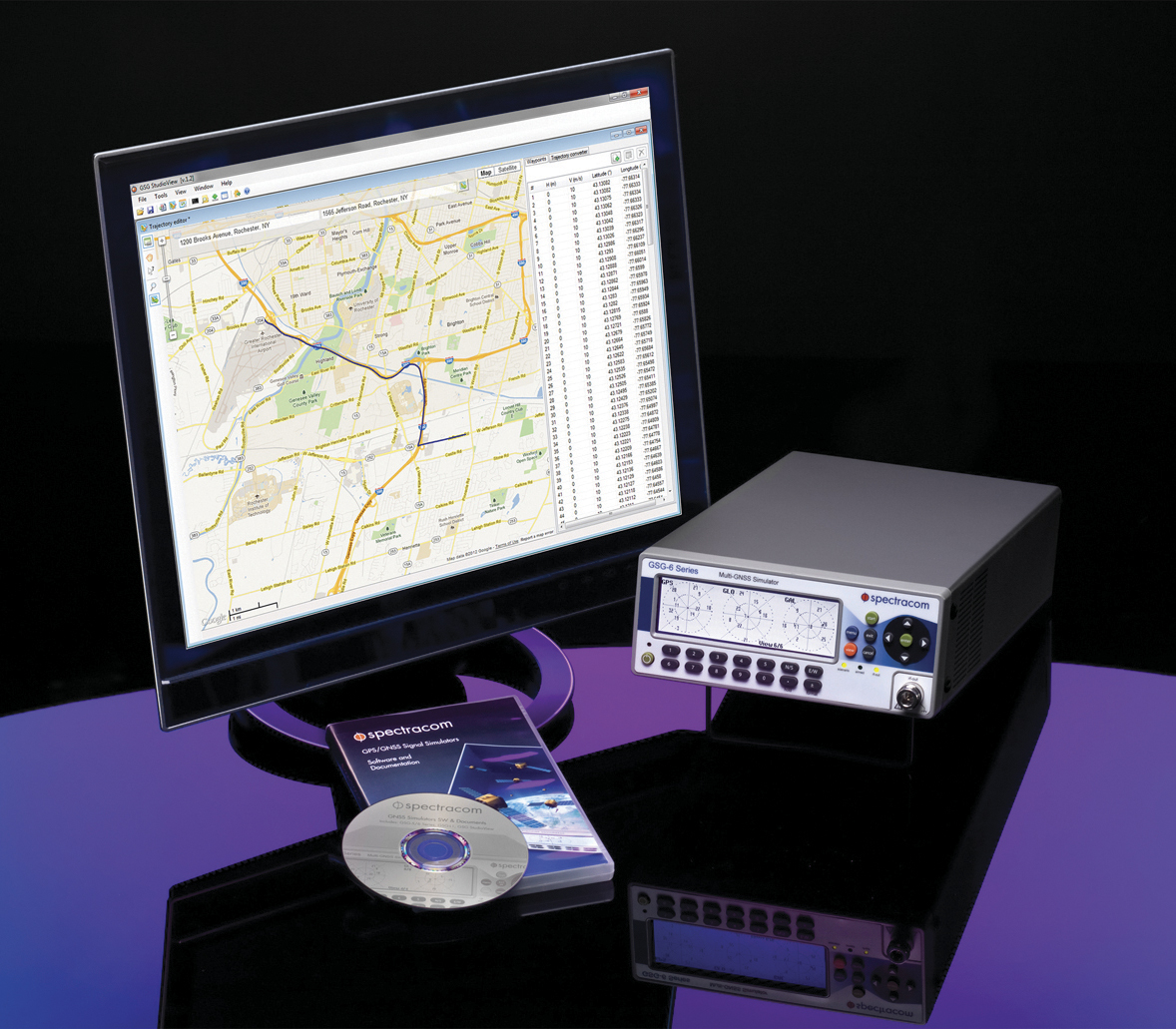
Spectracom multi-channel, multi-frequency GSG Series GPS/GNSS Signal Simulators are designed for research, development and manufacturing. They provide powerful, affordable, and easy-to-use application-specific GNSS testing solutions allowing users to simulate virtually any condition through built-in and user-defined scenarios. The simulators now feature expanded capabilities and a flexible, field upgradeable design that allows users to select only the features needed for a specific application, upgrade when necessary.
The GSG 5 and 6 Series simulators are portable and fully operational via front panel, web-based remote control (Ethernet, USB, GPIB), or SCPI protocol. The models include GSG StudioView PC Software to build, edit, and manage complex scenarios and trajectories. Advanced simulation features include: SBAS (WAAS, EGNOS, GAGAN, MSAS), multipath scenarios, interference detection and mitigation, white-noise generation, and trajectories. The new features and capabilities can be added to any GSG-5 or GSG-6 purchased since June 2012.
GSG-6 Series Multi-Frequency, Advanced GNSS Simulator
• Up to 64 channels and 4-frequencies simultaneously
• GPS, GLONASS, Galileo, BeiDou
• Sync multiple units for testing hundreds of signals
• L1, L2, L2C, L5, E1, E5, B1; [E6, B2, B3 capable HW, with FW upgrade available in the future]
• P-code, pseudo P(Y) in L1 and L2
• Add-ons for real-time scenarios, record and playback, Assisted-GNSS, RTK/Differential measurements, high velocity
• Fully upgradable to future constellations and signals
GSG-5 Series Multi-Channel, Advanced GNSS Simulator
• 4, 8 or 16 channels
• GPS, GLONASS, Galileo, BeiDou
• L1, E1, B1
• Upgradeable to more channels and frequencies
GSG-51 Low Cost Single Channel GPS Signal Generator
• 1-channel GNSS tester for fast, simple manufacturing test and validation
• Fully upgradeable to GSG-5 and 6 series
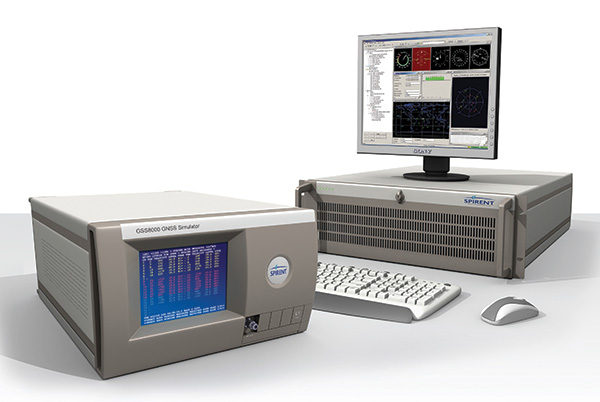
Spirent provides simulators that cover all applications, including research and development, integration/verification, and production testing.
GSS8000 (pictured). Spirent’s flagship simulator, the GSS8000, is fully approved for Y-code, SAASM, AES M-code and SDS M-code testing. Spirent provides options and configurations for testing GNSS interference effects and interference mitigation techniques, such as integrated GPS/inertial testing, CRPA testing, and jamming/anti-jam simulation.
Spirent has delivered simulators that produce legacy signals as well as modernized signals such as 2C, L5, and L1C. In addition to GPS, systems can include GLONASS L1/L2, Galileo, and Beidou-2, plus SBAS (WAAS, MSAS, and EGNOS) and Japan’s Quasi-Zenith Satellite System (QZSS).
CRPA Test System. Spirent’s Controlled Reception Pattern Antenna (CRPA) Test System generates both GPS L1/L2 and interference signals; multiple GSS8000 chassis may be combined to coherently control up to seven antenna elements. Null-steering and space/time adaptive CRPA testing are both supported by this comprehensive approach.
GSS7790. Spirent’s GSS7790 Multi-Output Simulation System allows the signal from each satellite to be mapped to a separate RF output. These signals can then be fed to individual transmit antennas, which, when suitably deployed in an anechoic chamber, replicate the spatial diversity of satellite and jammer signals incident on the receiver antenna. Additional flexibility is offered as the signal is further split into its GPS L1 and L2 components, as appropriate.
Includes: Spirent’s SimSAFE Fights Signal Vulnerability; JAVAD TR-3 Receiver; Teleorbit Upgrades Simulation Environment; IFEN Contract for Galileo Signal Test Bed; Spectracom Program for Application-Specific Testing; Spectra Precision SP-80 Uses Six GNSS Systems; Briefs
The design and verification of a new class of portable wideband record-and-playback system considers the relative merits and limitations of both simulator and record/replay approaches. The authors also discuss the benefits of the different test approaches to the development and characterization of various GNSS receiver types.
By Steve Hickling and Tony Haddrell
As new GNSS systems become available, and users take receivers to ever more challenging environments, the need for repetitive and repeatable testing during development grows ever stronger. Simulators have traditionally demonstrated performance and repeatability in the laboratory environment, and this approach remains the only option for planned signals not yet broadcast from space. However, this approach is becoming more complex as the number of GNSS signals and their reception environments increase.
Another way of testing receivers is through field trials. This allows investigation of conditions difficult to simulate, such as multiple reflections and interferers. These environments, however, are time-varying, and thus not repeatable in the true sense. Therefore, proper comparisons can only be made by assessing all competing receivers in the same trial, and any performance anomalies seen cannot necessarily be tracked down by returning to the same location at some point in the future. Furthermore, developers would like to see for themselves any such anomalies and try to understand and correct them, but it is not always desirable or practical (and certainly not economical) to put development engineers in locations scattered all over the globe.
To tackle this problem, GNSS signal record-and-replay capability is gaining acceptance as a practical tool for recording a signal environment at a single point in time and replaying at will. In real terms this means a device must receive the radio signals from the GNSS satellites, reduce them to a form suitable for storage, and then recreate signals from the stored data in a manner that makes them look completely real to any receiver under test or development.
Some receiver manufacturers developed their own capability to do this. Early devices were of necessity restricted in the signals they could handle and store, limited both by budget and available technologies. The basic problems are the amount of data to be stored in real time and the ability to recover it in real time. Even the GPS L1-only low bandwidth C/A code requires at least 2 Mbytes per single second of recording, or more than 100 Mbytes per minute.
Fortunately, with digital storage technology advances, we can now make use of higher storage capacities (1 TByte of storage is readily available at reasonable cost) and also higher write/read bandwidths (100 MBytes per second is realistic). All we need is some hardware and a processor that can handle the data rates.
Once we have our wanted signals reduced to some form of digital representation, we can simply store and retrieve them at will, handling the recordings as simple, if somewhat large, data files. This allows file distribution between equipments, and a split between making the recording in the field and replaying it in the laboratory. In fact, many manufacturers have dedicated field recording teams who send the files back to the engineers interested in the signal environments.
Replaying the signals is in some ways similar to generating simulated signals. In both cases, the starting point is digital data, on the one hand recorded in the field, on the other hand calculated by mathematical algorithms using the scenario specified in the simulator. In both cases the signal is created by generating radio frequency (RF) carriers and modulating them according to the GNSS signal formats.
Contrast of Two Approaches. None of the characteristics of the record/replay device replace the functionality of the simulator; in fact, both are valid tools for development and testing. For instance, it is not possible with a record/replay device to manipulate individual satellite signals, nor to introduce specific errors in the radio signals. Equally, it is not really possible with a simulator to recreate a particular physical environment made up of many reflected signals, jammers, manmade noise, and moving scenery. With a simulator, the user has control over the power of the received satellite signal, whereas in the recorder the entire signal-to-noise ratio observed at the point of reception has been recorded, and the user can only control the amplitude of the entire noise plus signal.
Permanent Signal Monitoring
One other aspect of raw signal recording lies outside the receiver testing topic, but is of interest for GNSS signal monitoring. It uses the ability to record GNSS signals all of the time, in this case from a good signal environment, and then to retain any time spans where an anomaly in the signals has been detected by a monitor receiver. This is comparable to recording security CCTV pictures, where we expect nearly all of the resulting files to be redundant, but can retain the interesting bits to replay over and over for further analysis. For example, if it is known that a given timing receiver installation suffers periodic loss of lock, it is possible to make a recording using the loss of lock to signpost the interesting region in much the same way as a reverse trigger on an oscilloscope.
Limitations and Compromises
The sheer function of recording GNSS signals off-air has some built-in limitations. First, the signal recorded represents only a snapshot of the environment, although numerous recordings can be made at, say, busy and quiet times, day and night, etc. This is really a reversal of the “non repeatability” aspect of measuring performance in a particular location. In the recording sense, we only get repeatability, with no guarantee that the scenario captured represents worst case conditions. Thus, going back to the location in the future may or may not provide similar results.
In addition to this, there are some signal processing aspects that limit the fidelity of the replayed signals. The first is that any recorder must have an external GNSS antenna and a GNSS receiver front-end built in, and this combination will receive both the satellite signals and thermal noise. The level of the noise is much higher than that of the signals if we don’t do any correlation related processing, and the receiver will contribute some more noise of its own (the noise figure of the system). The second aspect is that in downconverting the radio signals to a usable frequency for sampling and storage, the recorder must use some frequency reference of its own, which will contribute some frequency uncertainty and some phase noise (or jitter on the frequency). The final aspect is the digitization of the downconverted signal to get it into a suitable form for manipulation and storage. Since we are essentially sampling noise here (with the GNSS signal buried in it) we need to look at fidelity in reproduction of the noise during playback, and the effect of any signal (a jammer or interferer) that is above the amplitude of the noise. In analyzing this last aspect, we may include the effect of any automatic gain control (AGC) used to present the correct amplitude signal to the analog to digital (A2D) converter.
A New Simulation Requirement
We wanted to create a much more comprehensive and flexible device than hitherto available, going part way towards the much more general (and expensive) instrumentation recorders that are currently the only alternative.
The requirement is for a flexible, self-contained device that can be easily carried or transported for recording purposes, so having an internal battery and built-in control functionality, and simultaneously a device that fits neatly into a networked and externally controlled laboratory environment.
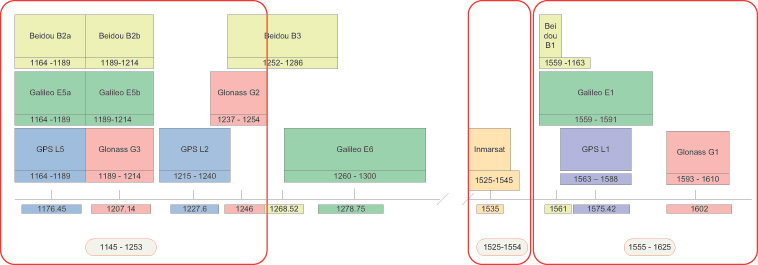
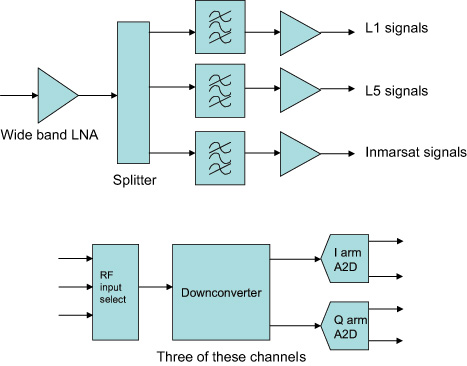
The first approach was to cover all of the possible GNSS frequency bands, although as more are added with time, we realized that this needed to be moderated somewhat. So the product covers L1, L2, L5 and their derivatives for the differing GNSS systems GPS, GLONASS, Galileo, and BeiDou, and also the Inmarsat commercial band to cover the proprietary augmentation signals used by many high-accuracy receivers (see Figure 1, red outlines).
FIGURE 1. Frequency bands, outlined in red, supported by the new record-and-replay device.
The next decision was what bandwidths to allow at each frequency, and how much of this bandwidth could be covered at once. The limitations here are driven by the data storage requirements of the signals being recorded, and the speed that they can be written to disk. The resulting solution allows bandwidths (BW) of up to 30 MHz at each frequency, and any three such bandwidths to be recorded at once. Physically, this is implemented with three channels with the ability to record any of the available frequencies or bandwidths. The user has, therefore, flexibility to set up recording for his particular needs, which may be just L1 covering BeiDou, GPS, Galileo, and GLONASS, or an L1,L2,L5, combination for a survey type application.
Of course, there are always requests for more capability, and we envisaged early on the ability to stack two devices to give six channels of 30-MHz BW for recording, say, GPS/Galileo and GLONASS at L1, GPS and GLONASS at L2, Galileo/GPS at L5, and an Inmarsat data carrier. See later for how this is achieved.
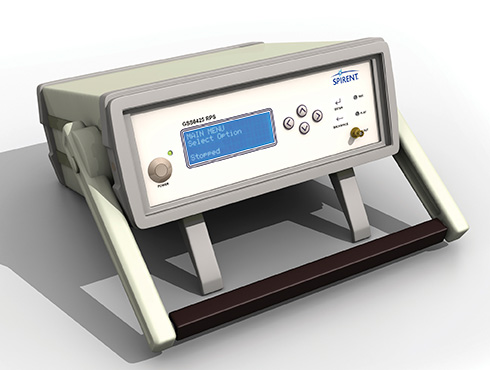
The whole product has to fit in a portable box with enough battery power for more than one-hour field campaigns, and also be capable of running from mains or vehicle power. The associated antenna needs to cover all of the frequency bands. Figure 2 shows the end result in its standalone configuration.
Figure 2. Portable solution for recording.
One additional requirement was placed upon the design, and that is the ability to record and replay non-GNSS data simultaneously with the GNSS signals, and reproduce them, if desired, in synchronism with the replayed signals. This allows time ticks, events, assistance data, sensor data, or even video to be stored and replayed along with the raw signals.
Architecture and Implementation
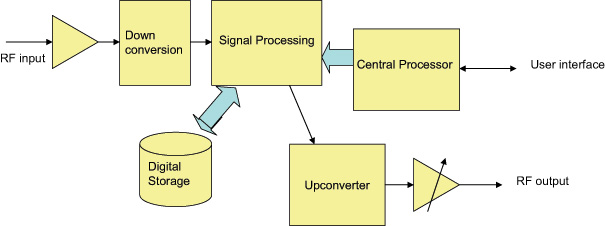
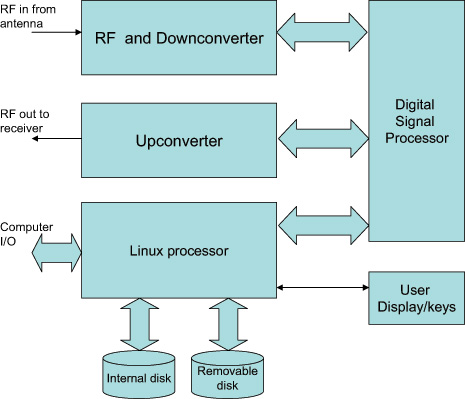
The new record-and-replay device uses a fast computer running the Linux operating system as its control center and storage/retrieval engine. Dedicated hardware is used to format or recover the raw data, and this has access directly to the computer bus to minimize the delays in writing or reading the mass storage, which in this case is a solid state hard drive (SSD). The overall architecture is shown in Figure 3.
Figure 3. Concept-level architecture.
The signal recording capability hinges around the RF planning, which has the task of supplying the necessary flexibility without adding more than minimal signal degradation.
For the RF functionality, the device contains a broadband front end and a three-channel RF amplifier (L1, Imarsat, and L2/L5), filtering the signal down to reasonable bandwidths for later downconversion. Three independent channels of downconversion to baseband I and Q analog signals have access to any of the RF channels and are based upon satellite TV technology architectures. The downconverters have baseband filters that can be commanded to a desired bandwidth by the control processor. This allows the use of narrower bandwidths where possible, allowing more recording time for a lower sampling rate. The baseband signals are sampled at 10 MHz or 30 MHz, paying attention to the Nyquist requirements for pre-digitisation filtering. Two bits for each of the I and Q signals are utilized for packing into the recorded file format. Figure 4 shows the arrangement.
Figure 4 . The RF architecture.
At this stage any additional synchronous data to be recorded, such as truth or assitance data, is inserted into the bit stream, and the data from all the channels in use is combined in a pre-determined format. Dedicated hardware is used for this, and large data buffers are provided to alleviate bottlenecks in sending data to the disks. Each file has an associated definition in a header, and contains synchronization data to allow the device to set up the replay path and recover the data bits in order to reproduce whatever combination was recorded. Note that resulting data files are given the same extension, regardless of content. Data files can be very big (at maximum bandwidth we record about 2.7 Gbytes per minute) and may be difficult to handle once recorded. To assist with this, the device has a second, removable SSD on board, allowing recorded files to be simply popped out of the caddy and shared with another device, or even mailed or couriered. The RF path for the replay consists again of three independent channels, able to generate any of the supported frequencies and modulate upon them the original signals recovered from the stored file. Once again, dedicated hardware and large buffers are needed to unpack the files and send the RF data to the correct channels or to the synchronous data outputs in the case of recorded digital data, as determined by the file header.
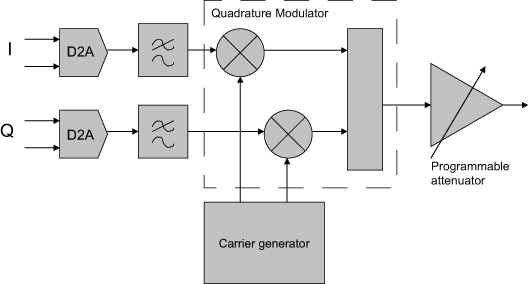
The data representing the recorded RF is converted back to analog form and filtered before being applied to modulators which regenerate the original channelized signals. Each channel has a programmable attenuator to “level” the amplitude, and the three channels are then combined together before passing through a common attenuator to provide user control over the replayed carrier to noise ratio (C/N0). Figure 5 shows the upconverter arrangement.
Figure 5. An upconverter channel.
All frequencies created within the device need to be traceable to a common reference. In addition, this reference needs to be at least as good as the reference in any receiver to be tested, since both its offset from true frequency and its rates of change will be superimposed on the replayed data. Many commercial-grade GNSS receivers (such as those used in mobile phone) are specifically designed to cope with poor oscillators, for instance a low-grade temperature controlled crystal oscillator (TCXO), whereas more professional receivers may expect a couple of orders of magnitude better performance. We decided, therefore, to include an ovenized oscillator (OCXO) for use both in record and playback modes. One challenge presented by this decision is that the oven is necessarily thirsty for power, and therefore a bigger battery is needed than would otherwise be the case.
The OCXO used is a 10.23-MHz component, thus allowing direct generation of the wanted GNSS frequencies using integer ratios and avoiding as much phase noise as possible in the various RF channels. A dedicated phase locked loop (PLL) generates a reference for output to other devices, and a 10-MHz input connector is provided to lock the OCXO to an external reference. These capabilities are utilized when combining two such devices, since we must have the same frequency reference in each. Apart from locking the two oscillators together, this configuration also needs time synchronization between the sampling in both devices, and this is achieved via an additional cable connected between the accessory connectors. Once time and frequency synchronized, the devices behave as a single six-channel unit, using external RF splitter/combiners for the RF connections.
Design Challenges
RF Total Bandwidth. The GNSS bands covered by the device range from the L5 band to the GLONASS L1 band, a total range of 480 MHz allowing for signal bandwidths. Table 1 shows the relevant bands.
Whilst the RF front end must be wide open to this range, assuming the use of a single RF input port, it is obviously necessary to provide bandwidth narrowing by filtering as soon as possible, to exclude jammers or carriers using the space between the GNSS bands, and to avoid the sheer noise power overwhelming the RF circuits. Examination of the supported GNSS services shows them essentially packed into two clusters of frequencies, which provide a convenient way of filtering down the RF input into two RF “channels.” This gets the total bandwidth down to about 180 MHz. Figure 1, the opening graphic for this article, shows the groupings. Beidou B3 and Galileo E6 are currently out of scope for this product, but will be supported in a later version.
The Inmarsat-supported signals are assigned their own RF path, since their structure is data modulated carriers, usually with low SNR. Elsewhere in the Inmarsat band there are more powerful carriers supporting comms traffic, which can “grab” the AGC and therefore cause loss of SNR during the digitization process. Hence this band is processed though its own RF path, maintaining as low a bandwidth as possible consistent with the frequency allocations of the various (proprietary) GNSS augmentation data carriers.
Tradeoffs. Throughput of the recording or replay paths is the performance limitation of the current architecture. Thus a lot of discussions and simulations concerning possible bandwidth, sampling rates, and bit depth tradeoffs was undertaken at the outset of the design. In addition, we needed to decide whether to sample signals at an IF frequency or at baseband. Trials were conducted to determine the real rates of disk access, which are different to the often quoted write and read speeds of computer interfaces.
The results of the trials and simulation led us to adopt a maximum average data rate to/from the storage system of 50 Mbytes/second, this being shown to be available over a period of many hours. Actually, at this rate we fill up a 1-Tbyte disk in about five hours.
To service the GNSS signal bandwidths of interest, again there are two groups of signals. This time we are looking at either the commercial signals (“open service signals” in some systems’ parlance) used by consumer-type receivers, which are relatively narrow band, and the military, high-accuracy, or resilient signals of interest to surveying and precision applications. Therefore, we offer two sampling rates, approximately 10 and 30 MHz, to avoid building large files where more than half of the bandwidth was of no interest to the user.
Next, we have to look at bit resolution. Given that we have generally a noise-like signal with Gaussian characteristics, if we were looking at digitizing at an intermediate frequency (IF), it can be shown that a 2-bit analog-to-digital converter (A2D) would be sufficient to keep the digitization losses to less than 1dB. Obviously, the fewer number of bits we need to store the better, commensurate with achieving the performance targets.
Frequency planning for all of the possible frequencies and bandwidths of interest is a complex task. The requirement here was to downconvert each signal of interest to a low IF suitable for digitizing, whilst having control of the bandwidth to eliminate unwanted signals and fulfill the Nyquist criterion. In addition, we wanted each channel to be isolated from the others even when the replay path involving the generation of the IF carriers was considered.
We therefore decided to downconvert to baseband for each channel, to avoid cross-contamination via the various IFs that would have to be generated for replay. In other words, we adopted an IF of zero Hz. This in turn means that the final bandwidth-determining filters are at baseband, and can readily be controlled by software means rather than having to switch RF paths. By downconverting into quadrature baseband channels, all stored signals are at the same (zero) IF, and crosstalk and imaging during upconversion is avoided.
Thus the A2D architecture of 2 bits in the inphase (I) and 2 bits in the quadrature (Q) arms of the downconverted signal was adopted. Doing the calculation in terms of stored data, we see that we can operate three channels inside our target storage bandwidth, with a margin left for other features such as storing video at the same time.
For 30M samples per second (SPS), each channel has 4 bits or 0.5 bytes
Therefore, for three channels the storage bandwidth is 0.5 * 3 * 30 MSPS, or 45 Mbytes/s
To keep the optimum A2D characteristics, the AGC is designed to adjust the signal amplitude at the converter to give a Gaussian response to the four states determined by the two bits in each arm. The AGC operates independently in each channel. Figure 6 shows the final architecture for the device in block diagram form.
Figure 6. Final architecture.
Real-Time Data Handling. Storage and retrieval of the digitized signals is carried out by dedicated hardware connected to the RF downconverter, the playback upconverter, and the main computer that “owns” the storage media. Large buffers allow the storage media to lag (record) and lead (playback) the real-time signals in time, and to take short breaks for housekeeping functions. Data is packed into a binary file according to a pre-determined sequence, which in turn is set by the number of channels and bandwidths in use. A file header is generated which contains all of the information necessary for reconstructing the data streams for replay. A synchronization sequence is added at the start of the file to allow recovery of the correct bits for each channel and each baseband quadrature arm, and to the correct timeslots for each component. Destroying the correct time reproduction is the most likely issue to cause faulty replay in any record/replay device. GNSS receivers don’t like discontinuous or slewing time!
This approach also allows the insertion of external digital data into the file. Providing the data processing hardware is aware of the individual bits into which this data is placed, digital data recorded at the same time as the raw signals may be regenerated synchronously during replay. Thus any data that is applied to a receiver in a real time trial can be available for the same trial any time after the event. Two streams of synchronous data can be recorded per channel potentially making six serial data streams per chassis available.
User Interfaces
A final challenge presents itself in the case of user interfaces. Although the operational options of the device are quite complex, there is a requirement to be able to capture field data with just the equipment itself and any necessary antenna setup. Consequently, the product has a display and control keys implemented on the front panel, allowing the user comprehensive access to the internal functions using a menu system and scrolling displays. Alternatively, for operation in a lab environment, a network connected user interface is specified, and this requirement is supported by a webserver running on the main processor in the device. Thus, simply opening a web browser and connecting to the device’s IP address allows full functional control.
In addition, connecting a mouse, keyboard, and monitor to the device allows access to the main processor, allowing the running of scripts thus providing full control of replays and receiver functions for running continuous tests in an automated laboratory environment. Using this approach, receiver modifications can be tested over many scenarios and locations many times each, to provide statistically relevant results, without taking up operator time. Remote monitoring is possible using the webserver.
Performance Testing
A range of tests and trials have been carried out to verify that the product meets its specifications, and to measure the performance in a number of real life scenarios.
Repeatability, Degradation, Attenuation. The first and most obvious thing to explore is the effect of the record and playback on signal-to-noise ratio. Since the RF circuits add some noise to the signal recorded, we would expect some degradation to take place here. Also, during replay, the receiver under test adds more noise, depending on its noise figure, although this should be the same as would be added when using “live” signals. Many receivers adjust for their noise figure when reporting C/N0 numbers (C/N0 is a signal to noise measurement normalized to a 1-Hz bandwidth and is the standard reported measurement for most GNSS receivers). However, by replaying back the recorded signal and noise at a higher level than would have been received in “live” conditions, we can eliminate almost all of the degradation. In live versus replayed tests for individual satellites using a JAVAD receiver, which allows us to test all of the supported bands and constellations, we found that replay is possible within ±1 dB of the original live signals. Replayed signals were about 10 dB above the original recorded level to achieve this, effectively swamping the receiver’s noise contribution.
An interesting aspect of controlling the C/N0 this way is the ability to attenuate the replayed signal and, therefore, increase the contribution of the test receiver’s noise figure. Thus, although the recorded C/N0 hasn’t changed, we can attenuate the replay level and use the receiver to add noise.
This process is not linear, and we obviously have to remove nearly all of the 10-dB excess to get started. The device keeps a table of attenuation vs C/N0 reduction, allowing the user to simply dial up the required C/N0 loss. Since this depends on the receiver noise figure, effects may differ slightly from receiver to receiver. Usefully the table is user definable allowing tailoring to a specific receiver.
Losses from Phase Noise, Other Factors. This category of degradation is more difficult to quantify, since the effects are on tracking and therefore range and phase measurement rather than signal to noise ratio. One way of looking at this is, therefore, to establish the positioning performance during live and replayed sessions, and measure the differences. This has some complexity, though, since putting the same signals into a receiver multiple times yields differing performance each time, meaning that we have to use some statistical analysis. Of course this isn’t possible on live signals, and is one reason why repeatable replayed signals are so important in developing GNSS receivers. Another aspect is the fact that some of the effects are differential among frequency bands (filter delays, for instance) and across bands as well (group delay) and also occur in the receiver under test, which will have been calibrated to mitigate its own contribution.
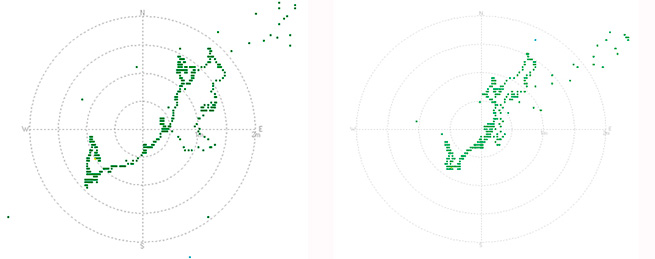
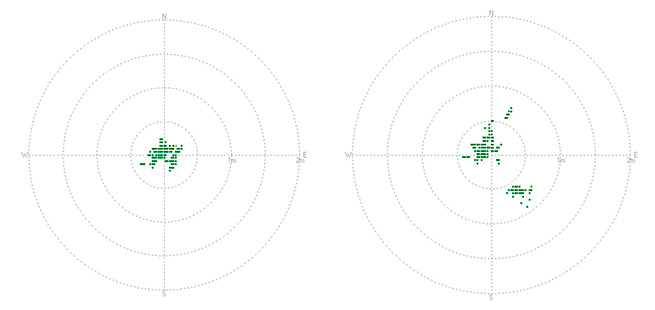
Figure 7 shows a comparison of static positioning for live and replayed signals using only GPS L1 and a 10-MHz sampling rate with an ST-Ericsson receiver, whilst Figure 8 is from a JAVAD receiver using all possible signals in live mode and GPS L1/L2 and GLONASS L1 in replay. In both cases the degradation is within 1 meter always, and much less than this when statistically analyzed.
Figure 7. Static position GPS L1 comparison: live left, replayed right.Figure 8. GPS L1/ L2 with GLONASS L1 comparison.
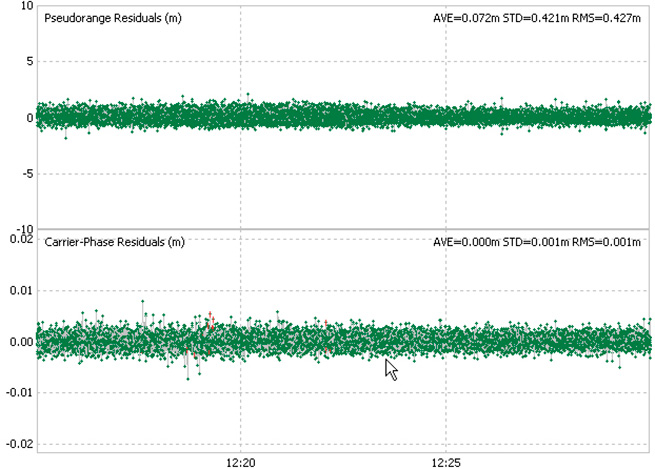
Another opportunity to measure the effects is to run a zero baseline phase solution, whereby the receiver is used as the “base station” when receiving live signals which are simultaneously recorded. During replay, the same receiver is used as the “rover” with RTK corrections coming from the previously captured live session. In this setup, therefore, we are really only measuring differences in the replayed and live signals, and the usual measurement limitations of the receiver.
Figure 9 shows the results of one such test, with the pseudorange and carrier phase residuals plotted. This was carried out using two devices in master/slave mode recording GPS L1, L2, L5, and GLONASS L1, L2. As can be seen, the residuals are within “normal” expectations and are measured as 0.42 m RMS for the pseudorange and 1mm RMS for the carrier phase.
Figure 9. Residuals from zero baseline replay.
Drive Test
One of the most common uses for the recorder is to capture the signals at a particular time in a chosen “difficult” environment, A number of representative trials were carried out and we were able to demonstrate consistent results and repeatability. In some cases, the replayed signals yield better performance than live ones, which of course is possible given the differing receiver responses per signal run.
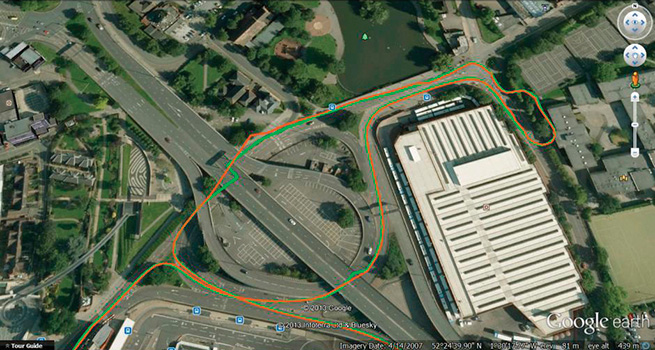
Also, the more times a receivers sees the same time span, the more ephemeris and iono data it can build up, especially true of built up areas where data acquisition is difficult. Figure 10 shows a small section of the City of Coventry in the UK, where the green trace is the “live” plot and the replayed one is in orange. Much of this route is under roads or buildings.
Figure 10. Live and replayed drive around in Coventry.
Dynamic Range and Fidelity
When jamming signals are introduced, the dynamic range comes into play. The earlier discussion of the 2-bit I and 2-bit Q architecture is tested here as the performance of the AGC and A2D is critical in maintaining the fidelity of the GNSS signals in a jamming environment. Note that we are not addressing deliberate jamming here, any “controlled” jammers can be added with an RF mixer at replay. Instead, we are concerned with the everyday jamming environment encountered just about everywhere electronic equipment is deployed.
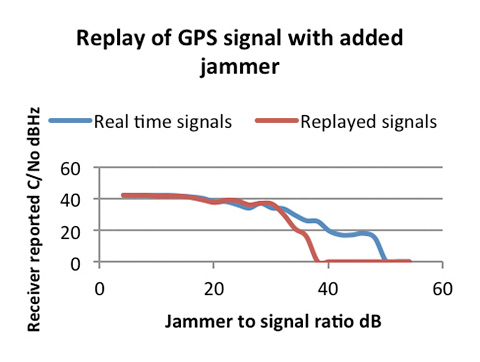
A test was carried out to determine the dynamic range of record/playback paths. A simulator was used as a GPS L1 signals source, and progressively larger jamming signal added via an RF power combiner. The resultant C/N0 in a test receiver was plotted using the live signals which were recorded at the same time. A subsequent replay of those signals was then plotted on top of the original C/N0s. The result is in Figure 11.
Figure 11. Results of the increasing jammer test.
As can be seen, with low jammer powers the real-time and replayed C/N0s track very closely. The ST-Ericsson receiver we used has some signal processing mitigation built in, and so only shows slow degradation as the jammer power is increased. In the real-time run, it was able to track satellites with the J/S ratio greater than 44 dB (and therefore >25 dB above the noise)
On the replayed line, we see the dynamic range limitations start to dominate the replayed signal when the J/S reaches about 30 dB, or 11 dB above the noise, which aligns well with the theoretical analysis of the digitization strategy. This range is sufficient for most environments encountered in real tests.
In Use and Additional Capabilities
With so much flexibility we find that users have a diverse range of applications for the device. These range from multi-constellation usage at L1 only, allowing BeiDou, Galileo, GLONASS, and GPS to be captured, to full six-channel recordings using GPS, GLONASS, and Galileo at L1, L2, and L5 along with an Inmarsat-based assistance channel. For the first time in this class of device, recording of the “military” bandwidth signals is possible. User feedback has been favorable, especially since the unit opens up new capabilities for receiver development and testing.
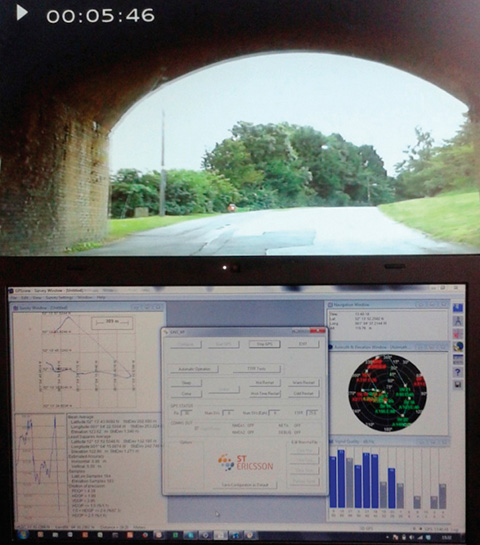
A small margin of recording bandwidth has been put to use with the ability to record video alongside the raw GNSS signals, and to replay it simultaneously. This allows developers not only to see the performance of their receiver in difficult signal environments, but also to gain a visual idea of the physical environment. Figure 12 shows a receiver control panel along with video pictures of the recorded environment.
Figure 12. GPS L1 and video synchronized replay
Conclusion
Early user feedback has validated the concept behind the device. Although the device will cover additional GNSS constellations and bands as they become operational, for the present the technology is stretched about as far as it can be consistent with the development of a timely and cost effective device. We will continue to address the compromises in the search for more performance, no doubt pushed by user demands.
Acknowledgment
The authors thank their colleagues at Integrated Navigation Systems and Spirent UK for support and access to design and user information.
Steve Hickling obtained his joint physics and electronics degree from the University of Birmingham. He is responsible for Spirent’s GNSS test solutions as lead product manager in the positioning business.
Tony Haddrell obtained his degree in physics at Imperial College, London, and is technical director at integrated Navigation Systems. He is a consultant to GNSS companies and a visiting lecturer at Nottingham University.
Mediatek has released a five-in-one combo wireless system-on-a-chip (SOC), with multi-system GNSS, to support full featured smartphones, tablets, and other premium mobile devices.
The MT6630 dramatically reduces the component count and eBOM while improving ease-of-design for manufacturers by eliminating external low noise amplifiers and integrating the Wi-Fi 2.4 GHz and 5 GHz power amplifiers, Bluetooth power amplifiers, and transmit-receive (T/R) switch into a PCBA footprint less than 65 square millimeters.
Features include:
Concurrent tri-band reception of GPS, GLONASS, Beidou, Galileo, and QZSS with industry leading sensitivity, low power, positioning accuracy, and the longest prediction engine
Dual-band single-stream 802.11a/b/g/n/ac with 20/40/80MHz channel bandwidth
802.11v time of flight protocol support and management engines to enable higher accuracy of indoor positioning via Wi-Fi
Advanced support for Wi-Fi Direct Services and Miracast optimization for easier pairing, increased robustness, advanced use-cases, and lower power
Bluetooth 4.1 with Classic, High-Speed and Low-Energy support, and ANT+ for compatibility with the latest fitness tracking, health monitoring, and point of information devices and applications
FM transceiver with RDS/RBDS
Integrated engines and algorithms for full concurrent operation and co-existence, including industry-leading throughput during LTE transmission
The MT6630 delivers full concurrent operation of all 5 systems operating at maximum compute intensity with no degradation compared to single-system operation while offloading the mobile device CPU for design ease and extended battery life.
As a focus on low power and digital home convergence, the MT6630 uses a configurable PA architecture to save current at commonly used power levels, including those used for Miracast Wi-Fi Direct services. The MT6630 implements advanced co-existence techniques, including for LTE to deliver industry-leading throughputs. The MT6630 also supports Wi-Fi diversity for premium smartphones and tablets to improve antenna angle sensitivity and handheld scenarios.
“The MT6630 makes it simple for manufacturers to bring mobile devices to market with sophisticated wireless features, lower power and uncompromised performance,” said SR Tsai, general manager of MediaTek’s Connectivity Business Unit. “The MT6630 furthers MediaTek’s focus to deliver the best experiences across the digital home and mobile applications by using its unique leadership position in digital TV host processors, smartphone platforms, and connectivity.”
The small-footprint design is available in 5 x 5-mm wafer-level chip-scale package (WLCSP) or a 7 x 7 mm quad flat no-leads (QFN) and requires only 44 components, which is around half that of other integrated wireless solutions, the company said.
Mediatek’s MT6630 is sampling now and complements the recently announced MT6595 octa-core SOC with LTE for premium mobile devices. The first commercially available devices to use the MT6630 are expected in the second half of 2014.
Detect and Locate GPS Jamming: Provide Actionable Intelligence
Sponsored by: Exelis Original Broadcast Date: Thursday, December 5, 2013 Moderator: Don Jewell, Editor, Defense PNT Newsletter Speakers: Jeff Coffed, Product Marketing Manager, Exelis Inc.; Carl Slutsky, Product Manager for Signal Sentry 1000, Exelis Panelists: Joseph Rolli, Signal Sentry Business Manager, Exelis; Jon Schnabel, Chief Scientist, Geospatial Systems, Exelis Summary: The Global Positioning System—GPS—is an essential element of the global information infrastructure and supports nearly every facet of modern life. However, the availability and usage of low-cost GPS jamming devices has resulted in the increased threat of intentional and unintentional disruption to commercial and industrial systems that rely on precise GPS data. That is why Exelis developed Signal Sentry 1000, a solution that enables authorities to locate with pin-point accuracy the sources of interference thereby assuring safety, efficiency, and revenue. This webinar will discuss the threat and Signal Sentry. This webcast will be of interest to anyone whose organization relies on GPS for information or commerce.
Sponsored by: Hemisphere GNSS Original Broadcast Date: Thursday, November 21, 2013
Moderator: Tony Murfin, Editor, Professional OEM newsletter
Speakers: Olivier Casabianca, Business Area Manager, Trimble GNSS OEM; Hal Adams, Co-founder/Chief Operating Officer, Accord Technology; Neil Gerein, Defense Product Manager, NovAtel; Eric Brewer, Senior Systems Engineer, Rockwell Collins; and Howard William Loewen, President, MicroPilot Inc.
Summary: In recent years, there has been explosive growth in the Unmanned Aerial Vehicle (UAV) market segment, with most on-board navigation systems relying on GNSS or GNSS with inertial aiding. As military budgets decline, interest in civilian commercial applications is growing rapidly. The FAA recently awarded special type certification to two UAVs for commercial Arctic operations, and the industry is now poised for the opening of the regulation floodgates to address a growing commercial demand. In this webcast, we will hear from some of the industry leaders in GNSS-based navigation for UAVs, in both the military and civilian sectors: they will tell us what they are doing in UAV navigation and where they see this exciting market going.
Racelogic’s latest update to the LabSat 3 simulator allows the use of 128-Gbyte SD cards, giving up to nine hours of high-quality RF recording. Also included in the update is the ability to use external USB hard drives and the addition of a serial/USB NMEA output, generated by the internal GPS engine during a replay.
The multi-constellation, stand-alone, battery-powered GPS/GLONASS/Beidou simulator is affordable and convenient, Racelogic said.
Along with SD card recording, LabSat 3 features inbuilt battery power, dual-channel recording of GPS/Galileo/QZSS/SBAS, BeiDou, or GLONASS, and logging of other external signals such as CAN and RS2232 — in a small, rugged, and light enclosure.
The Business section from the January 2014 issue (Download the PDF). Includes: 2014 Receiver Survey Addendum (for the full survey, click here); FAA Selects Six Sites for UAV Research; NovAtel Supplies Reference Receivers for IRNSS Ground Segment; SkyTraq Seeks Crowdfunding for GPS/BeiDou Development Board; Hemisphere GNSS Names Chuck Joseph President and CEO; Honda Joins Google Alliance to Develop GPS Solutions; Garmin Launches New Outdoor Series; Saelig Introduces Low-Cost SMD Antennas; Events