The Aibotix X6 unmanned aerial vehicle is designed to deliver up-to-date geospatial information from hard-to-reach areas.
Hexagon, a global provider of design, measurement and visualization solutions, has acquired Aibotix, a manufacturer of intelligent multicopter systems for high-efficiency aerial applications.
Headquartered in Kassel, Germany, Aibotix is the maker of Aibot X6, a new generation of vertical takeoff and landing unmanned aerial vehicle (UAV). Intelligent, autonomous and safe, the multi-rotor platform is designed to suit the needs of customers in the industrial inspection, aerial mapping, surveying, utility and security markets, Hexagon said.
UAV-based solutions are ideal for delivering up-to-date geospatial information and aiding in hard to reach areas – such as difficult infrastructure inspections of power lines, bridges and dams to locally focused mapping tasks of buildings or any vertical structure. They are quickly becoming a viable tool for key market segments that require application-specific solutions; where the UAV becomes an integral part of the workflow process, delivering essential pieces of information that drive actionable intelligence.
“The Aibotix acquisition is an important addition to Hexagon’s photogrammetric and mapping technologies portfolio,” said Hexagon President and CEO Ola Rollén. “The growing number of applications for UAV-based solutions offers huge growth potential, especially in areas that require frequent and local updates such as smart city applications, dynamic GIS, and emergency response.”
Applanix Corporation and American Aerospace Advisors have completed a successful series of test flights of AAAI’s RS-16 platform equipped with Applanix’ DMS-UAV aerial photogrammetry payload. This is the first successful mission for a long-endurance UAS (unmanned aerial system) capable of producing professional-grade, directly georeferenced mapping imagery for civilian applications such as pipeline monitoring, power line and emergency response mapping.
The RS-16 Unmanned Aircraft System equipped with the Applanix Direct Mapping Solution (DMS).
Tests were conducted over restricted airspace in the state of New Jersey. A joint team from Applanix and AAAI planned and flew a sequence of missions to evaluate the capabilities of the UAS. These include, critically, the ability to provide highly accurate, directly georeferenced and orthorectified aerial imagery without the need for ground control points or aerial triangulation calculations. The system, consisting of the airframe, its avionics, mobile ground control station and the digital mapping payload, performed according to expectations and successfully produced high-quality imagery.
“Performing safe and successful missions with long endurance unmanned aircraft in civilian airspace are a challenge that goes far beyond selecting the right aircraft and payload,” said David Yoel, CEO of American Aerospace Advisors. “Working with Applanix, we have produced an integrated system that is designed from the ground up with civilian mapping operations in mind. We believe this system has the capability to transform the aerial mapping industry.”
The Applanix RS-16 in flight.
The RS-16 DMS is a complete, operational system capable of conducting large area operations within the National Airspace System in the United States, and in other jurisdictions as local regulations allow. Within the USA, AAAI is engaged with several of the recently announced UAS research and test sites, which operate under the auspices of the FAA to develop the certification and operational requirements necessary to safely integrate UAS into the national airspace.
The GNSS-Inertial systems at the core of Applanix’ DMS-UAV aerial mapping payload uses commercial inertial technologies that are offered globally.
“The market for airborne imaging systems is in a state of rapid change,” said Joe Hutton, director of Inertial Technology and Airborne Products at Applanix. “Developments in imaging technology, in processing capability, and in the nature of inertial sensors, make a directly georeferenced UAS a reality today, where it would have been inconceivable even a few years ago. Our ability to take our established market-leading manned solutions, and integrate the technology successfully into an unmanned platform, speaks volumes for the engineering expertise of Applanix and AAAI.”
From CES to the Detroit Auto Show, it has been a big month for in-car connectivity that enables vehicle diagnostics, streaming entertainment, telematics and navigation. Ford, GM, Google and Audi unveiled new connected vehicle platforms and features, and AT&T stole the carrier limelight with LTE Connected Services.
Plus, two industry giants announced that they are working to enable vehicles to continuously record road position at accuracies of eight inches or less. Shoppers are becoming more open to sharing their personal location with retailers. And the U.S. GAO issued a report on location privacy related to vehicle technology and applications. It has been a busy month.
The first mass-marketed connected vehicle system was Ford Sync, which now boasts one million users and seems poised to grow rapidly with the release of an updated version. The Mustang will be the first of the company’s models with the new Ford Sync, which lets drivers use voice to activate iPhone and Android apps. New voice activated apps include Parkmobile, a parking space finder, and the Domino app, which lets me command my car to order a pizza, just the way I like it. GM announced its first LTE-enabled vehicles for about 10 of its models. Fast connectivity in vehicles will transform in-car experiences and hopefully not kill us.
Carrier Ringmaster. AT&T wrangled itself into the center ring of car connectivity announcements. The carrier has won a multi-year exclusive agreement to enable Telsa with high speed connectivity. Despite Audi’s collaborative relationship with T-Mobile, AT&T was able to steal some work away from T-Mobile by getting a deal to supply connectivity for some Audi models. AT&T has also teamed up with Ericsson, Amdocs, Jasper Wireless and others to create AT&T Drive, a mobile platform for developing LTE connected vehicle services.
Pathway to a Jetson Car. Two industry biggies, Continental and Here, are working together to create an end-to-end connected high-precision mapping and vehicle system offering for OEMs. The system will serve as the basis of highly automated driving functionality with the first objective of continuously determining road position to within three to eight inches. That’s quite a task. The maps will include road information that will feed vehicles with information to allow them to react to changing road conditions or speed limit changes, automatically. Continental was the first automotive supplier to be granted a test license for automated driving on public roads in Nevada.
See Me Now. The percentage of consumers willing to share their current location via GPS with retailers nearly doubled year-over-year to 36 percent, according to a new IBM study of more than 300,000 global consumers. The study distinguished four distinct groups of consumers, differentiated by their interest in and use of social, location and mobile technologies while shopping. The largest group, 40 percent of shoppers, use social, location and mobile technologies, but don’t utilize them for buying products. The second largest group, almost 30 percent of shoppers, will use these technologies for making purchases. The rest of the shoppers sit on either pole of being tech laggards or hyper technology users.
In-Car Privacy under the Microscope. The U.S. Government Accountability Office (GAO) has looked into privacy issues for in-car location-based services. The GAO examined how 10 companies are using location data and if they share it, and how the policies and practices of these companies align with industry recommended privacy practices. Each of the companies stated that they do not share personally identifiable location data with marketing companies or data brokers. The GAO found that not all of the companies were following industry recommended privacy policies. The report was prepared for the Senate Subcommittee on Privacy, Technology and the Law of the Judiciary Committee. The companies that the GAO chose to examine included TeleNav (ScoutGPS Navigation), Google Maps (Navigation), TomTom (LIVE Services), Garmin Traffic, Ford Sync, Chrysler UConnect, Honda AcuraLink, GM OnStar, Toyota (Lexus Enform and Toyota Entune), and Nissan Infiniti Connection and CARWINGS.
Retailers are Getting Closer. Qualcomm has made its Gimbal proximity beacons commercially available, which are reportedly accurate to one foot and work indoors and outdoors. Gimbal is a proximity platform for brands to engage customers’ mobile devices with contextual communication, using a combination of physical location, activity, time and personal interests. The intent is to increase the relevance of content delivered to end users’ devices to allow retailers, content providers and developers to send personalized high-value content to mobile devices.
After a rigorous 10-month selection process involving 25 proposals from 24 states, the Federal Aviation Administration announced it has chosen six unmanned aircraft systems (UAS) research and test site operators across the country.
According to the announcement, in selecting the six test site operators, the FAA considered geography, climate, location of ground infrastructure, research needs, airspace use, safety, aviation experience and risk. In totality, these six test applications achieve cross-country geographic and climatic diversity and help the FAA meet its UAS research needs.
A brief description of the six test site operators and the research they will conduct into future UAS use are below:
University of Alaska. The University of Alaska proposal contained a diverse set of test site range locations in seven climatic zones as well as geographic diversity with test site range locations in Hawaii and Oregon. The research plan includes the development of a set of standards for unmanned aircraft categories, state monitoring and navigation. Alaska also plans to work on safety standards for UAS operations.
State of Nevada. Nevada’s project objectives concentrate on UAS standards and operations as well as operator standards and certification requirements. The applicant’s research will also include a concentrated look at how air traffic control procedures will evolve with the introduction of UAS into the civil environment and how these aircraft will be integrated with NextGen. Nevada’s selection contributes to geographic and climatic diversity.
New York’s Griffiss International Airport. Griffiss International plans to work on developing test and evaluation as well as verification and validation processes under FAA safety oversight. The applicant also plans to focus its research on sense and avoid capabilities for UAS and its sites will aid in researching the complexities of integrating UAS into the congested, northeast airspace.
North Dakota Department of Commerce. North Dakota plans to develop UAS airworthiness essential data and validate high reliability link technology. This applicant will also conduct human factors research. North Dakota’s application was the only one to offer a test range in the Temperate (continental) climate zone and included a variety of different airspace which will benefit multiple users.
Texas A&M University – Corpus Christi. Texas A&M plans to develop system safety requirements for UAS vehicles and operations with a goal of protocols and procedures for airworthiness testing. The selection of Texas A&M contributes to geographic and climactic diversity.
Virginia Polytechnic Institute and State University (Virginia Tech). Virginia Tech plans to conduct UAS failure mode testing and identify and evaluate operational and technical risks areas. This proposal includes test site range locations in both Virginia and New Jersey.
Across the six applicants, the FAA is confident that the agency’s research goals of System Safety & Data Gathering, Aircraft Certification, Command & Control Link Issues, Control Station Layout & Certification, Ground & Airborne Sense & Avoid, and Environmental Impacts will be met.
Each test site operator will manage the test site in a way that will give access to parties interested in using the site. The FAA’s role is to ensure each operator sets up a safe testing environment and to provide oversight that guarantees each site operates under strict safety standards.
From the start, the FAA recognized it was important to have requirements ensuring that privacy and civil liberties are protected at the test sites. Among other requirements, test site operators must comply with federal, state, and other laws protecting an individual’s right to privacy, have publicly available privacy policies and a written plan for data use and retention, and conduct an annual review of privacy practices that allows for public comment.
Under the current law, test site operations will continue until at least February 13, 2017.
Amazon has unveiled its plans for a new Prime Air service that uses drone helicopters to deliver customers’ orders in as little as 30 minutes.
Amazon CEO Jeff Bezos said in an interview on 60 Minutes on Sunday that the drones would be ready to take flight in four to five years. But an Amazon spokesperson pointed to an updated post on the company’s website promising aerial deliveries as soon as federal rules change, which could be as soon as 2015.
In his November column, Professional OEM Editor Tony Murfin discusses the need for FAA rule changes that would allow commercial use of drones. Survey Scene Editor Eric Gakstatter also discusses the issue here.
Explosive growth in the UAV market is the focus of a free GPS World webinar this Thursday. Most on-board navigation systems in UAVs — unmanned aerial vehicles (UAVs) — rely on GNSS or GNSS with inertial aiding.
As military budgets decline, interest in civilian commercial applications is growing rapidly. The FAA recently awarded special type certification to two UAVs for commercial Arctic operations, and the industry is now poised for the opening of the regulation floodgates to address a growing commercial demand.
In Thursday’s webcast, “Unmanned Aircraft Navigation,” participants will hear from industry leaders in GNSS-based navigation for UAVs, in both the military and civilian sectors: they will tell us what they are doing in UAV navigation and where they see this exciting market going.
The webinar will be held Thursday, November 21, 10 a.m. PST / 1 p.m. EST / 6 p.m. GMT. Registration is free.
Guest Speakers
Olivier Casabianca, Business Area Manager, Trimble GNSS OEM
Casabianca works on the Trimble GNSS OEM portfolio which includes both the Trimble and Ashtech receiver module product lines. He joined Trimble in 2011 with the Ashtech acquisition where he was driving the Ashtech GNSS Technology roadmap and OEM portfolio. He has worked in the GNSS industry since 1997 and has held various positions in Engineering (RTK, GNSS Heading and Attitude firmware engineer, program management, engineering manager) and Marketing. He is located in Nantes area of France.
Hal Adams, Chief Operating Officer, Accord Technology
Hal Adams is founder and Managing Director of AvValues LLC which partnered with Accord Software & Systems, Bangalore, India to form Accord Technology LLC of Phoenix, Arizona USA. Adams has more than 35 years of civil and military aerospace and avionics experience in the aerospace industry, including senior leadership positions in general management, product and business strategies, development activities with Northwest Airlines, Lockheed-Martin, Litton Aero Products (now Northrop Grumman), Rockwell Collins Avionics, Thales Avionics and Aviation Communications and Surveillance Systems (ACSS – an L-3 Communications and Thales Joint Venture). As a co-founder of Phoenix Aerospace Consulting Group, Adams’ oversight responsibility was leading the NexNav business area which provided the industry’s first certified GPS WAAS Beta-3 sensors to the commercial aviation marketplace.
Neil Gerein, Defense Product Manager, NovAtel
Neil Gerein joined NovAtel Inc. as a GPS Software Engineer in 2001. Since 2009 he has worked as the Defense Product Manager for NovAtel. He is responsible for the navigation warfare product lines, including the GAJT GPS Anti-Jam antenna and OEM625S SAASM receiver used in unmanned vehicle systems. He holds B.Sc. and M.Sc. degrees in Electrical Engineering from the University of Saskatchewan, where he specialized in digital signal processing. Neil currently serves on the Council of the Institute of Navigation, as well as on the executive of the Alberta regional section of the Institute of Navigation.
Eric Brewer, Senior Systems Engineer, Rockwell Collins
Eric develops and tests guidance, navigation, and control algorithms for unmanned and optionally piloted aircraft. He was a key contributor to Rockwell Collins’ damage tolerance program, which successfully recovered a sub-scale F18 after simulated battle damage ejecting more than 75% of the right wing. As lead systems engineer, Eric spearheaded the successful integration of SAASM RTK on the STUAS program. He received a B.S. in Mechanical Engineering from Penn State in 2008, and an M.S. in Mechanical Engineering specializing in autonomous rotorcraft from Virginia Tech in 2009. When he’s not programming away in MATLAB, Eric enjoys hiking, rock climbing, and testing the damage tolerance capabilities of R/C airplanes and helicopters.
Howard William Loewen, President, MicroPilot Inc.
Howard is the president of MicroPilot Inc. Howard has a degree in Electrical Engineering with an option in Computer Science and a Masters degree in Computer Science both from the University of Waterloo. Howard has been involved in the UAV industry since 1994 when he started MicroPilot. Under Howard’s leadership, MicroPilot was the first to introduce a single board, fully integrated UAV autopilot into the market, the first to introduce ultra lightweight autopilots, the first to introduce a triple redundant UAV autopilot among others. MicroPilot has continued this tradition of leadership with its recent introduction of XTENDERvalidate a requirements management tool designed specifically for UAV system integrators.
On November 7, the FAA released a new roadmap for the “Integration of Civil Unmanned Aircraft Systems (UAS) in the National Airspace System (NAS)” — which it is hoped will provide improved guidance for those extremely interested operators, manufacturers, systems suppliers and those with pending civilian applications of unmanned aircraft.
The forward to the Roadmap by FAA Administrator Michael Huerta says,
‘This roadmap outlines the actions and considerations needed to enable UAS integration into the NAS. The roadmap also aligns proposed FAA actions with Congressional mandates from the FAA Modernization and Reform Act of 2012. This plan also provides goals, metrics, and target dates for the FAA and its government and industry partners to use in planning key activities for UAS integration.”
The FAA, acting through the Unmanned Aircraft Systems Integration Office, aims to enable the integration of UAS safely and efficiently into the NAS. To do so, the FAA is working with stakeholders — manufacturers, vendors, industry trade associations, technical standards organizations, academic institutions, research and development centers, governmental agencies, and other regulators.
The premise is that UAS will be allowed to operate in the NAS, but in so doing cannot reduce existing capacity or decrease safety, cannot negatively impact current operators/operations, and cannot increase the risk to airspace users or people or property on the ground — any more than the integration of other new or novel technology. While progress has so far been significant, many challenges and opportunities apparently lie ahead.
Up to the recent Restricted Type Certification of a couple of unmanned aircraft systems by FAA — namely the Boeing/Insitu Scan Eagle and the AeroVironment’s Puma AE — operators have been and still are required to apply to the FAA for individual Certificates of Authorization (CoA) for each and every U.S. application of UAS. The FAA Roadmap is intended to provide an initial estimate of timing and to list tasks and considerations that will ultimately enable UAS integration into the NAS for the planning purposes of the UAS community.
Boeing/Insitu Scan Eagle loaded for launch.
Commercial operations that the FAA envisages include:
security awareness;
disaster response, including search and support to rescuers;
communications and broadcast, including news/sporting event coverage;
cargo transport;
spectral and thermal analysis;
critical infrastructure monitoring, including power facilities, ports, and pipelines;
commercial photography, aerial mapping and charting, and advertising.
Other commercial and public applications that the FAA might also want to add to the increasing demand for airspace access include:
crop monitoring;
precision surveying and GIS;
wildlife monitoring;
(ground) traffic monitoring and control;
firefighting support;
police services;
many, many more applications which will emerge rapidly once regulations permit ready access to airspace.
Of course, the FAA controls an ever increasingly complex airspace to which certified manned aircraft already have regulated access – it’s only fitting that existing safety and commercial use be primarily maintained and in no way compromised. Successful demonstration of UAS to achieve demanding communications, navigation, and surveillance performance will be essential.
U.S. National Airspace System.
The Roadmap quotes the International Civil Aviation Organization (ICAO) Circular 328, “Unmanned Aircraft Systems (UAS) Circular”:
“A number of Civil Aviation Authorities (CAA) have adopted the policy that UAS must meet the equivalent levels of safety as manned aircraft… In general, UAS should be operated in accordance with the rule governing the flight of manned aircraft and meet equipment requirements applicable to the class of airspace within which they intend to operate…To safely integrate UAS in non-segregated airspace, the UAS must act and respond as manned aircraft do. Air Traffic, Airspace and Airport standards should not be significantly changed. The UAS must be able to comply with existing provisions to the greatest extent possible.”
Another significant FAA statement:
“Except for some special cases, such as small UAS (sUAS) with very limited operational range, all UAS will require design and airworthiness certification to fly civil operations in the NAS.”
So, having set the tone that UAS will have to grow up in a major way to become equivalent to existing manned aircraft and to comply with virtually the same rules, the Roadmap goes on to provide much more detail of what will be required.
The FAA is working on UAS regulations — this is not really a big surprise. It would seem that there is significant effort underway to get rules in place, detailed rules which not everyone in the UAS industry will welcome. One scenario is that the huge range of UAS suppliers that we see regularly at the AUVSI annual convention/exhibit could be slimmed down if the market indeed transitions to commercial operations from the current level of military applications, and only the big companies who can afford to comply will remain. Reduced competition usually means increased costs for users, so this may not sit well with the market.
Then there are more difficulties in adapting existing airborne regulations for commercial aircraft to UAS and UAS applications. An example is given of regulations for commercial transport cockpit doors — what’s a “cockpit” when you think of UAS, and where’s the “door” for a ground-based control system in a mobile trailer, or a handheld iPad flying a small quad-rotor air vehicle? (Maybe a different thought process is required here.)
Then the air-traffic control system has to absorb flight of unmanned aircraft in an already overcrowded route network system. Of course, only some UAS operations will be intertwined with regular commercial transport air traffic, but there are huge numbers of “less-disciplined” General Aviation fixed-wing and rotor aircraft with which UAS are bound to interact. So ATC has to understand, control and regulate that interaction. Surely these are common-sense statements which most people would support?
Major technology challenges are anticipated due to the absence of an on-board pilot.
“Removing the pilot from the aircraft creates a series of performance considerations between manned and unmanned aircraft that need to be fully researched and understood to determine acceptability and potential impact on safe operations in the NAS.”
There’s that dreaded word — “researched.” For anyone in the business of selling UAS or UAS systems, including GNSS-based guidance systems, the need for potentially prolonged research may spell death for a nascent business, currently bursting with potential!
Development of Sense and Avoid and Control and Communications (C2) systems with adequate performance are seen as the principle challenges, so a phased introduction of UAS is anticipated while these core systems are fielded and matured over a lengthy period. The current CoA approach is termed “accommodation,” while evolution is expected towards more compliant vehicles and systems during the integration phase — ultimately, with fewer and fewer CoAs. Although the Roadmap talked about “broad timelines,” this key section doesn’t try to predict how long this all might take.
The FAA summarizes the accommodation phase as:
Accommodation of UAS in the NAS through evaluation and improvement of safety mitigations.
Work with industry and the Aviation Rulemaking Committee (ARC) to review the operational, pilot, and airworthiness regulations.
Development of required standards to support technological solutions to identified operational gaps (Minimum Operational Performance Standards [MOPS]).
Safety case validation for UAS operations in NAS — collect/analyze operational and safety data.
Robust research, modeling, and simulation for UAS Sense and Avoid, C2, and human factors.
The Integration phase is characterized by adoption of FAA regulations through certification of compliant UAS and UAS systems — the balance between CoA operations and regular operations in the NAS shifts toward more compliant, and presumably more unrestricted, access within FAA regulations. With UAS and UAS systems achieving airworthiness certificates, and trained and certificated UAS pilots filing regular flight plans for UAS operations, integration moves towards adoption. “All UAS must file and fly an IFR flight plan.” Lessons learned in earlier phases are moved into updated regulations and incorporated into equipment capabilities, and certificated UAS get increasingly better access to the airspace they require.
FAA also makes mention that in the integration phase, the six proposed UAS FAA test ranges will be selected. This has been in the works for considerable time. The assessment of proposals and award of contracts had initially been delayed on the basis of privacy questions, but these now appear to have been adequately addressed to allow these key parts of the UAS integration program to move ahead. A principle objective of the test ranges is to help provide a verification mechanism for safe operations before unmanned aircraft are integrated into the NAS. Tasks envisaged include development and proving of:
manned-unmanned operations,
certification standards and air traffic requirements,
coordination and leveraging of National Aeronautics and Space Administration (NASA) and DoD resources,
civil and public unmanned aircraft systems,
coordination with NextGen (a major NAS update program currently being undertaken by FAA).
Integration will have been successfully established when new operational rules and associated standards, policies, and procedures have been established for small UAS and other UAS, and C2 link standards have been defined for integrity, latency, and continuity. FAA will also need to have accepted Minimum Aircraft System Performance Specifications (MASPS) to enable development of detailed MOPS and the FAA should have published policy and operational guidance to define acceptable methods to comply with operational rules in accordance with an acceptable UAS certification basis for each applicant, along with flight-crew training and certification standards.
For the final “Evolutionary” phase of adoption of UAS, it’s expected that there will be seamless operations of certified UAS and crew members in the evolving NAS; FAA will have published Type Standard Orders (TSOs) based on system level MOPS; and certified Sense and Avoid algorithms will be available for collision avoidance and self-separation that are interoperable with evolving NextGen ATC systems and manned collision avoidance systems.
Quite a long list of extensive requirements to meet for a new industry that, so far, has been largely unregulated and has, so far, been used to providing rapid military/governmental solutions that prove themselves operationally over time. More empirical development to satisfy specific operational needs than compliance to published regulations. This isn’t exactly a sea-state change for the industry as it sits today, but perhaps rather a shift into another dimension.
To even get itself onto this road, let alone follow this extensive 74-page roadmap, the UAS industry may have to completely re-invent itself. But with military sales declining, the funding to take on even the simplest of these requirements may be drying up. The tendency for operators may be to try to cling to the CoA system indefinitely and just live with the hassle of applying for FAA authorization each time. FAA’s seeding of commercial applications using Restricted Type Certification of existing platforms that use existing uncertified systems and payloads may also be a way out for some time. If the Scan Eagle can gain limited access to take on commercial, paying applications because it has +800,000 proven military flight hours, eventually other UAS may also creep into some sort of equivalent eligibility. And if we manage to operate safely without major headlines, the FAA may relent in some of its extensive requirements.
Then again, the FAA just published a rather extensive roadmap, with separate backup, which says it has other ideas in mind….
I asked a couple of industry experts what they thought of the Roadmap. One comment was, “To me the real challenge is flexibility in the plan such that it will be a reasonable process to adapt to changes based on findings, experiences as this goes forward.” I agree, and believe that the FAA has gone to some length to make it clear that this is the first issue of the Roadmap, that there will be updates as more is learned. The whole process is one of learning from what has gone before in earlier stages.
Please join us Thursday, November 21, for a GPS World webcast on Unmanned Aircraft Navigation. We’ll have a number of industry leaders who will present their companies’ experience and capabilities in navigation for UAS, along with how they see this exciting market segment progressing, and how the FAA’s plans could impact their vision of the future for UAS navigation systems suppliers. Register today for free.
As some of you may know, I also write a monthly column for Geospatial Solutions, which is all about geospatial technology encompassing GIS, surveying, engineering, and anything regarding geospatial technology. On occasion, I write something that fits very well with both my Survey Scene newletter and Geospatial Solutions Monthly newsletter. This is one of those months.
Drones, UAVs, UAS…whatever you want to call them, are getting a lot of press coverage, both in the mainstream media and the surveying trade media. Rightly so — there are a terrific number of uses for drones in surveying and mapping from forensic mapping to crop monitoring to creating terrain models for volume estimations. A little later below, I’ll give you a link to my more detailed article about applications and my personal experience.
In this article, I’d like to focus on the U.S. law regarding using drones for commercial purposes (eg. mapping, surveying, etc). I’ll start with a blanket statement.
Under the current law, it is illegal for any commercial entity to operate a drone in the U.S. Period.
The only exception is that the Federal Aviation Administration (FAA) is issuing special airworthiness certificates in the experimental category for testing, market survey, and training of drones. However, the FAA specifically states that drone users awarded such an experimental certificate are not licensed to use drones for “hire or compensation.”
The only other possibility is if the commercial entity has an airworthiness certificate for the drone like what’s required for any other aircraft such as an airliner. However, you can bet that no drone within your price range has such a certificate.
What about hobby users?
This is where it gets interesting and where some commercial users think there is wiggle room.
Under the current FAA rules, hobbyists (the FAA calls them modelers) can fly drones up to 400 feet above ground level (AGL) and must notify the airport operator if flying within three miles of the airport. Hobbyists are covered under the AC 91-57 rules, a simple one-page document.
Some (maybe many) companies and/or individuals who are operating drones for mapping in the U.S. think this is a loophole in the FAA rules, and that as long as they do not charge for the drone flight-time, they are not violating the FAA rules (they say they only charge for processing the data). The FAA begs to differ. When I asked the FAA this question, FAA Spokesperson Alison Duquette responded:
“They would be violating FAA rules. Please read this policy link. The FAA recognizes that people and companies other than modelers might be flying UAS with the mistaken understanding that they are legally operating under the authority of AC 91-57. AC 91-57 only applies to modelers, and thus specifically excludes its use by persons or companies for business purposes.”
This begs the question, is the FAA following a “don’t ask, don’t tell” informal policy? The best way to determine this is to look at their enforcement activity. When I asked the FAA if it would send me the list of enforcement activity regarding drones, the agency said I’d have to submit a Freedom of Information Act (FOIA) request, which I did this week. I’m told by my colleagues it may take some time before I get a response.
I know of at least one instance where the FAA told an entity to shut down its use of drones. Take a look at this three-minute CBS news video.
Last month’s article about post-processing alternatives, “Seven Free Alternatives to OPUS GPS Post-Processing During U.S. Federal Government Shutdown,” was one of the all-time, most-read articles ever published on the GPS World website. It’s ironic because I’m not a fan of post-processing in general. Mind you, I coordinated the development of several post-processing (both L1 and L1/L2) software packages back in the 1990s, so it’s not like I’m afraid to post-process or don’t understand the technology. It’s just that it’s so inefficient compared to RTK. However, I do concede that OPUS, AUSPOS, CSRS, Centerpoint RTX, GAPS, Scout, and MagicGNSS online post-processing tools combined with an increasing number of publicly available, worldwide GNSS reference stations make centimeter-level post-processing a lot easier (and less expensive) than ever before. It seems like a lot of you still prefer it!
RTK technology is advancing too, from both a receiver perspective and a satellite system perspective. Which geographic region of the world do you think is the most well-suited for RTK positioning?
It may seem like an odd question, and it would have been to me had I not attended the ION GNSS+ conference in Nashville, Tennessee, in September and the Intergeo 2013 conference in Essen, Germany, in October. How could one geographic region be significantly better for RTK positioning than another? Terrain? Nope. It’s the same country that consumes more L1/L2 receivers than any other country in the world: China.
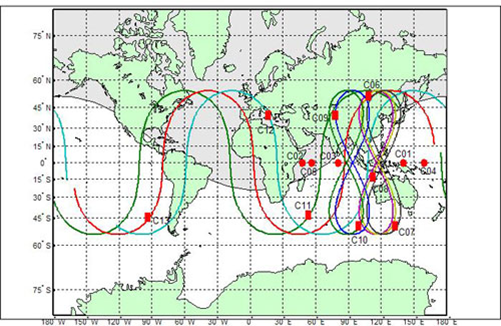
Why China? A picture (well, two pictures) is worth a thousand words:
At this point, China’s BeiDou (now referred to as BDS) navigation system is a regional system. If you look at the above graphic of the BDS satellite orbits, you can see the satellite figure eight orbits above southeast Asia. These satellites, combined with GPS and GLONASS, give the RTK user a tremendous number of usable satellites. Furthermore, since the BDS satellites are in figure-eight orbits, they stay “in view” longer ,which is ideal for RTK.
The result is that GNSS users in the BDS coverage area have more satellites in view than any other region in the world, and we all know that more satellite observations make for better RTK positioning.
China’s plans don’t stop with BDS being a regional system. By 2020, China says it plans for BDS to be a global system similar to GPS and GLONASS. The BDS presenter at ION GNSS+ said, “China always regards BeiDou belonging to both China and the world.”
GPS and Galileo Delays
Meanwhile, as it seems China is pushing forward, both GPS and Galileo suffered delays last month.
The fifth GPS IIF satellite (IIF-5) launch scheduled for last month was postponed. A fuel leak in the Delta 4 launch rocket seems to be the culprit. No new launch date has been scheduled for IIF-5. The United Launch Alliance (ULA) issued the following statement:
“The ongoing Phase II investigation has included extremely detailed characterization and reconstructions of the instrumentation signatures obtained from the October 2012 launch and these have recently resulted in some updated conclusions related to dynamic responses that occurred on the engine system during the first engine start event.
“The GPS IIF-5 Delta IV launch is being delayed to allow the technical team time to further assess these updated conclusions and assess the improvements already implemented and determine whether additional changes are required prior to the next Delta IV launch.
“The Delta IV booster for the GPS IIF-5 mission has completed the standard processing and checkout on the launch pad and will be maintained in a ready state for spacecraft mate and launch pending completion of this assessment. A new launch date will be established when the assessment of the updated dynamic response information is completed in the coming weeks.”
Meanwhile, Europeans have been waiting on pins and needles for the first production launch of dual Galileo satellites. A fall 2013 launch date was expected, but has been postponed until Summer 2014.
According to European officials, the European Space Research and Technology Centre (ESTEC) thermal vacuum chamber for testing satellites under orbit conditions was not ready for the two FOC satellites delivered by OHB in late summer.
The satellites thus cannot ship to the Guiana spaceport in South America in time for a planned 2013 launch on a Soyuz rocket. The Galileo schedule is also running into bottlenecks with scheduled launches by other satellite programs aboard Guiana Soyuzes.
A six-week test of the first Galileo satellite at ESTEC reportedly got under way in October.
The pressure is rising for Galileo to start delivering usable satellite observations, which China is already doing, albeit for themselves and their neighbors.
To fly a UAV in the U.S., you’d better be able to avoid any other aircraft — and ADS-B is one component of that capability. When the FAA and agencies around the world get their UAV regulations aligned with those levied on passenger-carrying aircraft, GNSS receivers on board UAVs will likely need to be qualified to equivalent standards. One company is already there.
When I was wandering around the show floor at the Association of Unmanned Vehicle Systems International (AUVSI) in Washington, D.C., in August, I got a pleasant surprise when I bumped into an old friend I knew from Calgary. Jayanta Ray was a grad student at the University of Calgary (U of C) when I was at NovAtel a few years ago. The students of the GNSS courses at U of C were often at local Calgary ION chapter meetings I organized or attended; there were also a few joint industry-university projects, and there were many, many discussions. So meeting Jayanta (Jay) at the Accord Systems/NexNav booth was a pleasant surprise, and it was good to renew our acquaintance.
This got me thinking that maybe some of that U of C receiver magic had somehow found its way through Jay into the airborne qualified receivers that Accord Technology is offering for UAVs. Jay is actually a member of the GPS World Advisory Board, and provides a great overview of what’s good and what’s different about airborne qualified receivers in this month’s issue of GPS World.
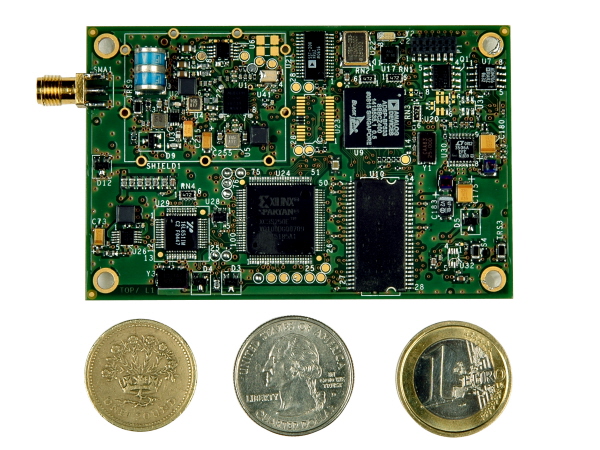
NexNav mini is also qualified for airborne GPS and ADS-B use.NexNav mini is also qualified for airborne GPS and ADS-B use.
Accord Technology is based in Phoenix, Arizona, and is the U.S. arm of Accord Software and Systems of Bangalore India, specializing in FAA-certified airborne versions of Accord’s GPS receivers.
At AUVSI, one of the hot topics was “Sense and Avoid” — if you are to fly a UAV in the U.S. National Airspace System (NAS), you’d better be able to avoid any other aircraft, and maybe also be able to tell other aircraft in the NAS where you are. ADS-B (Automatic Dependent Surveillance-Broadcast) is one component of that capability. ADS-B uses a network of ground stations that relay ADS-B transmissions from aircraft (called ADS-B Out) in the NAS to the Federal Aviation Administration (FAA) air-traffic management system, and the signal is also available to aircraft flying in the system if they are equipped to listen to the message (ADS-B In). Air Traffic Control (ATC) can then verify that you are where you are supposed to be, and your actual position shows up more readily on their tracking systems. Right now, ATC makes extensive use of radar tracking and aircraft transponder signals to track aircraft — ADS-B will be more efficient, less costly to maintain, and is capable of aircraft-to-aircraft position reporting. By 2020, it will be mandatory if flying within the U.S. NAS.
The other part of this story is that, eventually, when the FAA and other agencies around the world get their UAV certification regulations aligned with those levied on passenger-carrying aircraft, GNSS receivers on board UAVs will likely need to be qualified to equivalent airborne standards.
Accord has already done an enormous amount of work to qualify its NexNav receivers for both requirements, and was at the AUVSI conference to let the UAV community know that these receivers are available now. If you were developing a new UAV now, with a view to selling lots into the anticipated wide range of commercial applications, its certainly going to help your case with the certification authorities to install as much off-the-shelf certified avionics as you can. Accord already sells these receivers to a number of general aviation system manufacturers, and also supplies stand-alone ‘TSO’ed” receivers in enclosures for use on a number of aircraft types. When an airborne receiver is granted the TSO (Technical Standard Order) designation by the FAA, it recognizes that the receiver has been designed, built and qualified to stringent airborne technical requirements and is authorized by FAA for use on aircraft.
So how does a company with its HQ in India get to hold an FAA TSO for a GPS receiver? Well, other than taking years to develop the receiver in accordance with approved development standards, document the hardware and software design, and conduct test and verification activities, the company also proves to the FAA that the receiver meets the FAA-specified airborne GPS functional requirements. Loads of engineering work — and then you have to convince FAA that you did it all and did it right.
Accord in Bangalore actually teamed up with AvValues in Phoenix to form a joint venture known as Accord Technology (AT) to work the project together. Most of the original receiver development work was done in Bangalore, while AT in Phoenix became responsible as the design authority, and for production, certification activities, customer service, product support, and business development. Naturally, Accord in India still does ongoing engineering support and supplies receiver cards to AT under contract. The other twist to the story is that final assembly and test is carried out at the AT facility in Anchorage, Alaska, where the TSO was approved by the local FAA office.
But Accord isn’t only into airborne receivers. The company has been around since 1991 and has significant engineering resources (around 400 electronic and computer engineers) — with more than 700 man-years of GNSS R&D and production involvement. Here are some examples of the other GNSS products which Accord has in its technology/product inventory:
GPS L1 RF down-converter.
GPS RF & baseband.
GPS module.
GPS Spacecraft Positioning System (SPS).
Time-code generator.
SPS was developed for the Indian Space Research Organization (ISRO) and has been flown on all Indian low-Earth-orbit satellites, including IRS P4/5/6, TES, CartoSat, SRE and OceanSat.
IRNSS Reference Receiver.
The Reference Receiver is fielded in the ground-monitoring network for the Indian Regional Navigation Satellite System (IRNSS), which may mean that the ground network is using at least dual-redundant reference data, as NovAtel has also provided a similar receiver for IRNSS. Accord is also working on IRNSS user receivers.
Other receivers include high-dynamic GPS-GLONASS receivers, GPS/GLONASS/Gagan SBAS receivers, an internal GPS/GLONASS/Gagan simulator, and a handheld GPS/Gagan receiver with integrated three-axis compass and pressure altitude sensor — the latter used by a number of paramilitary forces.
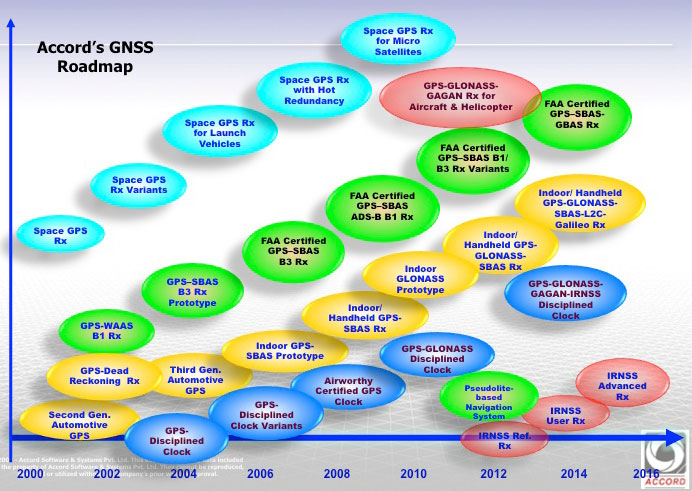
Accord GNSS roamap.
And as can be seen from the Accord GNSS Roadmap, they aren’t done yet!
You might ask yourself, where in the heck did all this come from? Certainly, there is an element of internal support with work for ISRO and Indian forces, but you don’t jump into this without some background. Well, the principle activity for Accord has been and still remains high-integrity software development for avionics systems — this is probably what Accord is known for in Europe and to a certain extent in North America. Its customer list for RTCA DO-178B/C airborne software sounds like a who’s who of aircraft and helicopter manufacturers — including Airbus, Boeing, Mitsubishi, Gulfstream Eurocopter/AugustaWestland/NHIndustries, Sikorsky, and Hindustan Aeronautics Limited (HAL).
Accord’s activities have included complete and partial life-cycle activities — all the way from requirements definition, software design and development, to independent verification and validation. For those of us who’ve worked in this field, we recognize that these are considerable technical capabilities — indeed, more than 50 engineers at Accord have been trained in the art of airborne software development by FAA-qualified engineering representatives. Working in this area and successfully bringing avionics systems through the qualification/certification process, companies either become capable or break all their bones trying! Clearly, Accord has been schooled in systems that are at the forefront of avionics technology, and has passed through the practical fire of qualifying airborne systems successfully.
So, it’s not really surprising that Accord went on to spin off into airborne GNSS receiver development once it gained wide visibility and knowledge of aviation technology and began to look at related markets. And with the Indian government policy of developing indigenous industries, Accord likely had some internal Indian customers. Quite a number of parallels with the way Europe has encouraged its own GNSS industry through the Galileo program.
With several avionics OEM manufacturers already using embedded NexNav TSO certified receivers in their systems using incorporating licensed designs, Accord looks well positioned to continue its airborne market growth. Accord’s success has so far been in general aviation, but it has wider aspirations, which include commercial transport aircraft (airline aircraft) — this is a segment which has the highest level of development/certification scrutiny and is therefore the most expensive segment in which to compete. Let’s hope Accord continues its growth and there is room in an expanding market for these relative newcomers.
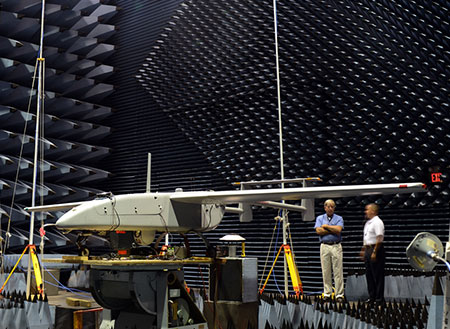
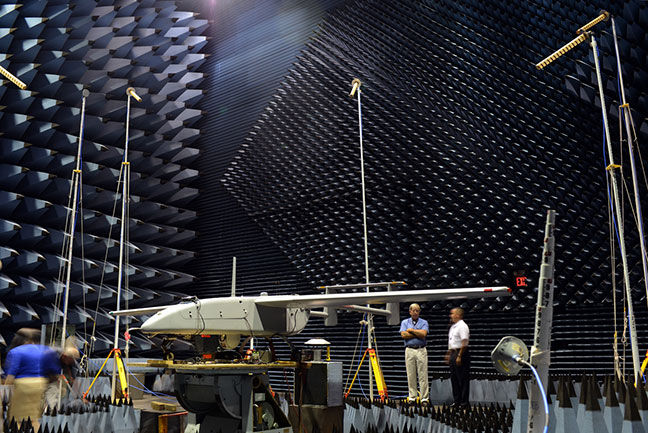
The Navy’s Communications and GPS Navigation Program Office (PMW/A 170) mounted a Small Antenna System on an Aerostar unmanned aircraft then placed it in a room lined with signal-absorbent material, where it was subjected to GPS jamming signals at Naval Air Station Patuxent River, Md. Part of an initiative to protect GPS technologies on small unmanned aerial vehicles, the Navy conducted the tests in July to demonstrate how miniaturized GPS protection devices can prevent interruption of the mission-critical global positioning data. (U.S. Navy photo)
Part of an initiative to protect GPS technologies on small unmanned aerial vehicles (UAV), the Navy recently conducted tests to demonstrate how miniaturized GPS protection devices can prevent interruption of this mission-critical global positioning data.
From July 10 to 24, the Communications and GPS Navigation Program Office, headquartered in San Diego, mounted a Small Antenna System (SAS) on an Aerostar unmanned aircraft, then placed the small UAV in a room lined with signal-absorbent material at the FARM (Facilities for Antenna and RCS Measurements), where it was subjected to GPS jamming signals.
Equipped with model jammers, the FARM facility was used as a stage for the “enemy” to jam the GPS signal and try to knock the UAV off course, said Eric Stevens, the Unmanned Aircraft Systems Communications and Navigation lead for PMW/A-170, which supplied the antenna system. Knocked off course, the UAV would not be able to relay critical intelligence back to the ground control station — disrupting communications among U.S. and allied forces’ ships, aircraft and submarines. In a worst-case scenario, GPS jamming could even cause UAVs to crash.
“If an enemy is trying to jam, or interfere, with the GPS frequency, this antenna allows us to be able to track and acquire the true GPS satellites even in the midst of this jamming and interference,” Stevens said. “What we are doing is demonstrating and quantifying the value of this antenna on small UAVs.”
Personnel involved in the testing were optimistic about the results.
“We are hoping to gain some ground and show there are smaller GPS protection solutions out there,” said Michelle Jackson, an electronics engineer with experience in testing SAS systems on other platforms.
Equipped with the SAS, the Aerostar will be also used to support a U.S. Army pre-deployment war-game scenario conducted at Fort Polk, La., in August, said Donn Rushing, the project lead for MUDO. Rushing participated in the Fort Polk exercises last year and said the addition of the GPS anti-jamming antenna will give the “good guys” an edge this year.
“This new anti-jam system decreases the footprint normally required of such a system, which is now ideal for UAV incorporation and service,” Rushing said. “What makes us smarter is knowing our enemies are smart and that we have to stay one step ahead of them. The SAS development is the latest GPS anti-jam capability to aid the war fighter in combating the bad guys.”
Two Autonomous Vehicles Seek Safe Avoidance in Critical Tests
A new state-of-the-art research center runs car-makers’ safety systems through their paces, in tandem with a soft-target robot that can be crash-impacted without adverse effects. Precise positioning and exact repeatability of test sequences are key criteria.
Paul Perrone, Perrone Robotics
The Insurance Institute for Highway Safety has undertaken a $30 million expansion project at its Vehicle Research Center near Washington, D.C., enlarging and enhancing a state-of-the-art vehicle test track and building a new 700 x 300-foot (213 x 91-meter) covered track for weather-resistant testing.
The VRC will use new robotic and positioning technologies to achieve required levels of precision and repeatability for vehicle testing of frontal collision avoidance and other safety systems. Tests of both the same and different vehicles must be conducted under identical, controlled conditions for the results to have comparable fidelity.
Crash tests and research conducted at the VRC help drive life-saving improvements in vehicle designs. The new facility will enable staff to evaluate emerging automated vehicle technology in commercial vehicle systems intended to prevent crashes or lessen their severity, with the goal of encouraging the entire industry to adopt the most effective new features.
Safety systems in vehicles to be tested include the following:
◾ Adaptive cruise control
◾ Collision-imminent braking
◾ Lane-departure warning/correction
◾ Other automated technologies.
Such functions represent semi-automated functions aboard vehicles now on the road. The system is also designed to address and test the full spectrum of semi- to fully-automated vehicles, addressing evolving levels of autonomy and ultimately producing driverless vehicle technology.
IIHS has contracted Perrone Robotics, Inc. (PRI), to deliver a robotic system for testing such vehicles. PRI develops new applications using its MAX robotics and suite of automation software building blocks. MAX enables rapid integration of a range of sensor and actuator types and has evolved with several frameworks, including MAX-UGV for unmanned ground vehicles. PRI has used MAX-UGV to build automated passenger cars, all-terrain vehicles, tractors, custom platforms, and rockstar Neil Young’s long-range electric LincVolt, a converted 1959 Lincoln Continental.
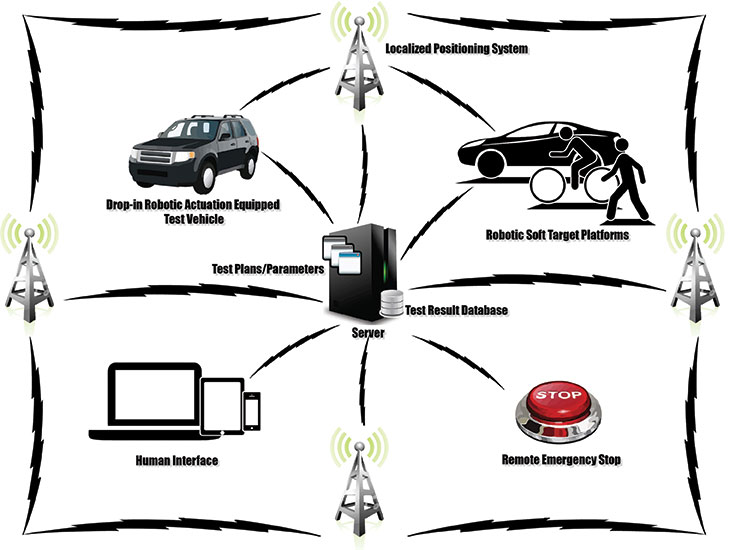
FIGURE 1. PRI test system.
For the first phase of the IIHS project, the Perrone Robotics system includes a robot target vehicle with the footprint of a car, but measuring only 4 inches high, with a 1-inch ground clearance.
A robot target vehicle with the footprint of a car measure 4 inches high. Photos: Brian J. Geiger.
Test Scenario Example. One instance to be tested is National Highway Traffic Safety Administration criteria for crash-imminent braking (CIB). The CIB concept goes beyond the forward-collision warning systems already found in many new cars by actually engaging the brakes when a driver, at fairly slow speeds, gets too close to the car in front of him. In tests, the while the test vehicle travels at similar speeds on a programmed collision course with the robot.
The target robot vehicle carries one of a number of soft targets. If the vehicle under test fails to prevent a collision with the robot target, the test vehicle runs over the robot target vehicle, dislodging the soft target, but avoiding damage to the test vehicle, robot target vehicle, and the soft target. The next phase of the project adds smaller-footprint target robot platforms with soft targets, representative of pedestrians and cyclists.
To ensure that the test vehicle can perform repeatable tests, the system also includes a drop-in actuator kit that can be installed into any test vehicle in 30 minutes or less. The system is designed to allow a human driver to sit comfortably in the vehicle and optionally drive, but can also control the throttle, brake, and steering to drive test profiles. Repeatability is key for the operation of robots and vehicles, as well as track conditions, which will be helped by the covered track.
The VRC test track is installing Locata as its positioning system. In addition to alleviating concerns about GPS outages or dead/weak signal spots, this enables the PRI system to be operated reliably inside the new covered test track. While GPS is not an option for covered or indoor test sites and suffers from environmental issues, the high fidelity and localized positioning provided by Locata overcomes these barriers to test.
Drop-in actuator kit steering. Photos: Brian J. Geiger.Drop-in actuator kit throttle-brake. Photos: Brian J. Geiger.
PRI will deliver the target robot and drop-in actuators custom-built. The company looked at starting with existing platforms and building from them, but it would have been infeasible or overly expensive to meet the IIHS requirements for this system. Most existing systems were developed for vehicle dynamics testing or low-speed/simple collision testing. Most couldn’t handle some or all of the more challenging requirements such as the following:
Drop-in actuator kit:
Allow human driver to sit comfortably and drive the vehicle without interfering;
Drive autonomously while also allowing for hybrid modes whereby test drivers and onboard systems may assist or take over controls;
Offer out-of-the-box programmability and flexibility to handle a wide range of test scenarios and automated vehicle levels;
Install into any vehicle in 30 minutes or less;
Do not damage vehicle with installation; retain a significant percent of resale value.
Target robot vehicle:
Accelerate from 0 to 55 mph in 10 seconds;
Survive collisions at speeds up to 55 mph;
Allow collision-avoidance testing with minimal damage to test vehicles and target robot;
Scale for carrying a wide variety of soft-target payloads and enable a wide range of vehicles, from small car to SUV to tractor-trailer) to be tested.
Locata positioning system:
Work outside and also on covered track; cover track area with no dead/weak spots;
Deliver better than 10-centimeter accuracy for position measurements and relative position control of robots and vehicles;
Deliver position updates at 100 Hz in combination with attitude and heading reference system (AHRS) or inertial navigation system (INS).
The positioning requirement derives from the testers’ need not only for accurate location data of each vehicle, but for precise knowledge of how far apart they are while performing real-time control to orchestrate repeatable scenarios, intersecting vehicle and robot paths to determine whether the vehicle acts to prevent a collision.
A human operator is easily accomodated within the drop-in actuator kit. Photos: Brian J. Geiger.
Safety Systems
There is a driver in the test vehicle, and there are personnel present at the test site who could be injured by a test vehicle or target robot platform. In addition to wireless e-stop remotes, the test vehicle and target robot systems can be disabled and stopped by a number of events. In the target robot, an e-stop causes the battery pack to be completely disconnected from all vehicle systems, and a spring-load is released applying mechanical braking to stop the vehicle.
Under normal conditions, the spring is held back with a pneumatic system and air is dumped upon e-stop event. A target robot e-stop is triggered by
◾ remote e-stop controller
◾ a command issued by control software
◾ loss of communication with external systems
◾ failure of or loss of communication with internal systems
◾ loss of power.
Aside from fail-safe remote and onboard e-stop systems, additional safety measures are employed by means of safety controllers that monitor safety-critical regions of software, implement a wide range of robot-safety checking rules, and ensure that the robot is operating within safe parameters of the environment (such as by staying within an invisible fence and pre-defined operation boundary).
Common MAX-UGV Robot Logic
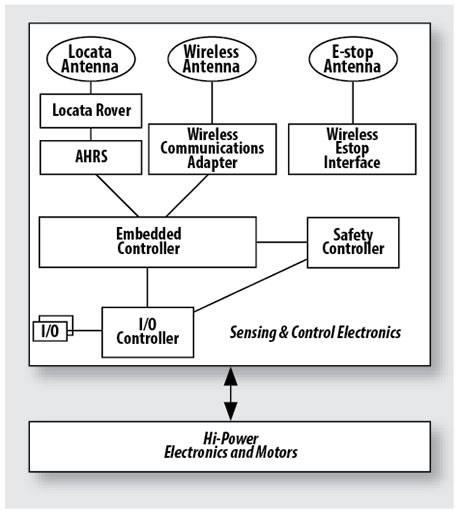
A common instrumentation and control system (CICS) for both the target robot platforms and test vehicle instrumentation and robotic assist platforms is illustrated in Figure 2.
FIGURE 2. Target robot logic flow.
Embedded Controller. The heart and soul of the vehicle hosts and runs the algorithms, receives sensor data, and executes actuation commands to the motor controllers based on desired route plans and dynamic sensor information. This controller runs the MAX software platform, MAX-UGV framework, and various MAX drivers.
I/O Controller. Handles inputs from sensors for temperatures, voltages, and currents as well as monitoring limit switches and actuating relays. Certain controls are planned such as mock brake lights on target robots and warning lights in test vehicles.
Locata. A constellation of nine LocataLite units on towers covers the existing track for Phase I of the project. Phase 2 will require additional units to add coverage to the covered track; some towers will provide coverage to both tracks. Each target robot vehicle and each drop-in kit for the test vehicles carries a Locata rover.
Locata’s new software essentially adds some capability from its indoor software to its outdoor software to deal with reflections/multipath issues caused by the metal buildings at the test site. The new software also allows the rover to perform real-time calculations on board, required for the less-than 10-cm accuracy. Previously this had to be done on a separate system and data had to be transferred back and forth, which worked against meeting real-time position update requirements for controlling speed, position, and relative position of robots and test vehicles. In test vehicles and target robots, the Locata rover position updates are merged with the output of an attitude, heading, and reference system (AHRS).
AHRS. The CICS in the robots and test vehicles includes an AHRS that provides the required heading, position, and velocity updates. Accuracy requirements are heading, 1 degree; position, less than 10 centimeters; velocity, 1 mph. Our required position update rate is 10 Hz. We expect to achieve 100 Hz in our system, which improves self-nav capability and overall performance. This rate also applies to other measured/logged data. A Kalman filter computes data from sources within the AHRS and from external sources: GPS and Locata.
Wireless Adapter, Antenna. On our critical channel, we exchange messages between vehicles to effect proper trajectory and relative positioning. Our e-stop controllers and safety systems also use this network. The non-critical channel is used for test setup and supervisory control, decimated data transmission for HMI monitoring, and logged data transmission.
Wireless E-stop Interface. This interface is for remote shutdown of a vehicle. The e-stop triggers are similar for the test vehicle systems, but the driver can also disable the robotic system. Rather than brake the test vehicle, an e-stop of the test vehicle systems disables the steering, brake, and throttle actuators into limp-mode and releases control of the test vehicle to the driver.
Safety Controller. A separate watchdog controller monitors live conditions and the embedded controller and onboard systems, and serves as a direct line for remote wireless e-stop.
Electronics, Motors. These includes six high-performance 4-inch motors, motor controllers, cut-off contactors, and overall cut-off system for e-stop.
Conclusion
The IIHS expansion project is a first of its kind for automated vehicle testing, breaking new ground for target positioning and control, and providing the first indoor test track for this purpose. Data from these tests will be used to improve safety of on road semi- and fully-automated vehicles and help save many thousands of lives, setting a high bar for capability and performance of all automated vehicle functions. Requirements for safety, repeatability, and seamless handoff between driver and autonomous control of the test vehicles, as well as the speeds at which the robots must travel and survive collisions, pose significant challenges. We believe our systems meet them fully.
microdrones, a German manufacturer of light-weight Vertical Take Off and Landing Vehicles (VTOLs), has successfully demonstrated a high-precision aerial journey over the Alps from Switzerland towards Italy with its 5-kg md4-1000 quadrocopter microdrone. Precise GPS coordinates and elevation, crucial for navigating obstacles and completing the flight in punishing weather conditions, was provided by an onboard u-blox GPS satellite receiver module.
Equipped with a high-resolution video camera, the autonomous microdrone completed 18 pre-programmed flight segments, mapping designated landmarks along the way. Here is a video showing it in flight.
“This successful journey of our microdrone demonstrates the robustness, reliability, and versatility of our autonomous drone technology which is being increasingly used for aerial mapping, surveying, search and rescue, security, utilities inspection, and aerial photography,” said Sven Juerss, microdrones CEO. “The md4-1000 was faced with intense wind and temperature fluctuations during its flight. It also had to navigate around power lines and a cable car during its more than 12 kilometer trip, which included a 1,600-meter change in altitude. This autonomous flight would not have been possible without the robust, ultra-precise, real-time satellite positioning technology from u-blox.”
“Fully automated devices are increasingly used to do tasks that are too costly and dangerous for human operators,” said Herbert Blaser, VP Business Marketing at u-blox. “The microdrone is a perfect example of a cost-effective, versatile, location-aware machine that allows people to collect important information at high altitudes from a safe, ground-based control center. This is an application that exploits all the features of our satellite navigation modules; fast, accurate-fix, low-power consumption and reliable operation in extreme environmental conditions.”
Several sponsor companies took part in the preparation and realization of this remarkable endurance test: Daimler AG made four Mercedes-Benz AMG support vehicles available, Sony Germany, Carl Zeiss AG and GPS/GNSS and wireless hardware and software developer u-blox contributed their audio, video and satellite navigation technologies to the project.
microdrone’s md4-1000 is able to fly autonomously for up to 88 minutes, and carry a payload of up to 1.2 kg.