The RealSense camera uses two fisheye lenses and an IMU to construct location awareness. (Photo: Intel)
The Intel RealSense Tracking Camera T265, designed for positioning and maneuvering mobile robots and other portable systems, includes an inertial measurement unit (IMU) that enables developers to create solutions with advanced depth-sensing and tracking capabilities. Intel introduced the camera in Q1 of 2019. An earlier model, the D435i, also includes an IMU but is a depth camera, not a tracking camera.
As robots, drones and other autonomous mobile devices must — eventually — interact independently and intelligently with their environments, they must track their locations as they move, navigating unfamiliar spaces while discovering, monitoring and avoiding still and moving obstacles in real time.
Block diagram of camera components. (Image: Intel)
Moving toward that goal, the T265 includes two fisheye lens sensors, an IMU and an Intel Movidius Myriad 2 video processing unit (VPU), a system-on-chip component for image processing and computer vision at very high performance per watt.
Vision-based simultaneous localization and mapping (V‑SLAM) algorithms run directly on the VPU with very low latency. The T265 has demonstrated less than 1% closed-loop drift under intended use conditions. It also offers sub 6 ms latency between movement and reflection of movement in the pose.
The RealSense device measures 1 x 0.5 x 4 inches (108 mm x 24.5 mm x 12.5 mm), weighs around two ounces (55 g), and draws 1.5 watts to operate the entire system, including the cameras, IMU and VPU. Its spatial sensing and tracking capabilities are based on technology developed by RealityCap, acquired by Intel in 2015.
The camera performs inside-out tracking: it does not depend on external sensors to understand its environment. Tracking is based on information gathered from the two fisheye cameras, each with a 163-degree range of view (±5 degrees) and capturing images at 30 frames per second. The wide field of view from each sensor keeps points of reference visible to the system for a relatively long time, even if moving quickly.
Visual-Inertial Odometry. A key strength of visual-inertial odometry is that the sensors complement each other. The images from the camera are supplemented by data from the onboard IMU, which includes a gyroscope and accelerometer. The aggregated data from these sensors is fed into the SLAM algorithms.
The algorithm identifies sets of salient features in the environment, such as a corner of a room or object that can be recognized over time to infer the device’s changing position relative to those points.
The visual information prevents long-term drift from the inertial that degrades position accuracy. The IMU operates at a higher frequency than the cameras, allowing for quicker response and recognition by the algorithm to changes in the device’s position. A map of visual features and their positions is built up over time. In re-localization, the camera uses the features it has seen before to recognize when it has returned to a familiar place. The camera can locate its point of origin with an error margin of less than one percent.
Drone testing demonstrated that, in both cases, the tracking and position data generated by the peripheral was closely correlated with what was provided by GPS. This supports the viability of using it for navigation in areas where GPS is not available, such as under a bridge or inside an industrial structure.
The SafeAir System is a smart parachute system that monitors UAS flight in real time, identifies critical failures, and autonomously triggers a parachute.
The ASTM F3322-18 Standard Specification for UAS Parachutes was designed to enable civil aviation authorities (CAAs), like the Federal Aviation Administration (FAA), to determine whether a parachute system is airworthy for flight over human beings.
Among other requirements, the standard defines more than 45 aerial deployment tests in various failure scenarios, verified by a third party.
ParaZero’s ASTM-compliant SafeAir Mavic is designed specifically for DJI’s Mavic 2 series. The SafeAir System is a smart parachute system that monitors UAS flight in real time, identifies critical failures, and autonomously triggers a parachute. The system contains a flight termination system, a black box to enable post-deployment analysis, and a warning buzzer to alert people below of the falling drone.
Safe UAV flights over people. The completion of the compliance process for the SafeAir Mavic will open the doors for UAS operators that are interested in the possibility of safe and legal UAS operations over people using the DJI Mavic 2. The FAA has granted a waiver for flight over people to an operator using ParaZero’s ASTM compliant SafeAir Phantom.
Photo: ParaZero
The third-party validation provided by NPUASTS — an FAA UAV test site in North Dakota — played a crucial role in the ParaZero testing. The ParaZero project is in line with the work the NPUASTS is doing to promote the safe integration of UAS into the National Airspace System.
The ability to safely operate UAS over people and in urban environments through waivers and approval is important for the growth of the UAS industry.
“Third-party validation of the SafeAir Safety System for the Mavic is a necessary step for the industry to help advance operations of small UAS in various environments,” said Nicholas Flom, NPUASTS executive director. “With the partnership from ParaZero, we are one step closer to realizing routine flight operations over persons on the ground.”
UAS operators can now purchase the ASTM-compliant SafeAir Mavic on ParaZero’s website. UAS operators will also receive compliance documentation with the purchase of the SafeAir Mavic system, including NPUASTS’ third-party testing report. This documentation and report will provide validation that operators can submit to the FAA with an operations-over-people waiver application.
“Following the precedent setting waiver announced earlier this week, we are excited to launch our second ASTM compliant SafeAir System,” said Avi Lozowick, vice president of policy and strategy at ParaZero. “We are lucky to have partners like NPUASTS for this process; their aviation experience is second to none.”
SoftBank plans to introduce a centimeter-accurate, real-time satnav-based positioning service, specifically using Japan’s Quasi-Zenith Satellite System (QZSS), to guide autonomous vehicles across a range of industries in Japan. The company said it will install more than 3,300 control points at base stations across Japan to deliver centimeter-level accuracy over its mobile network coverage area to provide real-time kinematic (RTK) positioning.
Testing begins in July with a scheduled launch of commercial service by the end of November. Test partners include Yanmar Agribusiness Co., Ltd., a provider of autonomous assisted driving for agricultural machinery, Kajima Corporation, which performs construction site management with automatically controlled drones for aerial photography and monitoring, and SB Drive Corp., a provider of autonomous and assisted driving technology for buses.
SoftBank is developing proprietary low-cost GNSS receivers so that “new services and market expansion can be realized.” A Positioning Core System provided by ALES Corp. will generate correctional data based on signals received and transmitted by SoftBank’s own control points over SoftBank’s mobile communications network to agricultural and construction machinery, self-driving cars, drones and other equipment carrying GNSS receivers. The company expects that centimeter-level positioning can thus be done in real time.
In addition to control points at its own base stations, SoftBank will use the Geospatial Information Authority of Japan’s approximately 1,300 GPS-based control stations.
SoftBank is also developing services to enablec loud-based RTK positioning for devices without GNSS receivers. Cloud-based RTK will provide centimeter-level, location-based services for equipment that needs to be miniature and energy-efficient, such as infrastructure surveillance sensors and wearable devices.
SoftBank Group Corp. is a Japanese multinational conglomerate holding company headquartered in Tokyo. It owns operations in broadband, fixed-line telecommunications, e-commerce, internet, technology services, finance, semiconductor design and more. It is the 36th largest public company in the world, and the 2nd largest in Japan.
ALES is a joint venture established by SoftBank and Enabler in July 2018. Enabler employs GNSS and related technologies to produce such products/services as a synchronization solution for mobile base stations for subway stations and a patented indoor positioning/time synchronization infrastructure platform in Japan.
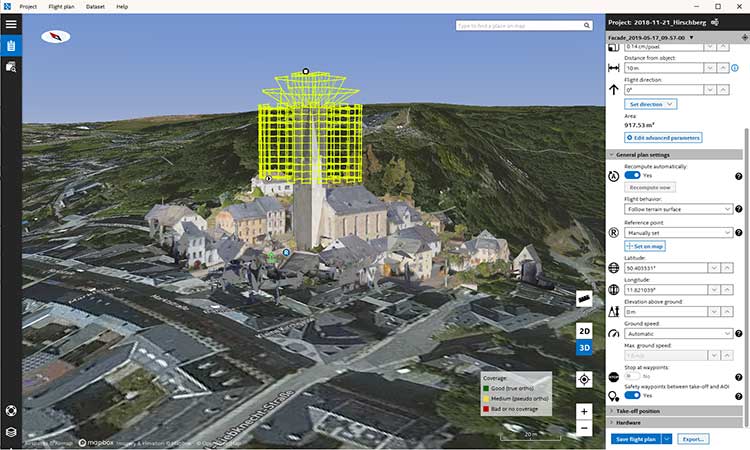
Topcon Positioning Group has released its next-generation flight-planning system for its rotary-wing aerial UAV offering.
The new Intel Mission Control Software is designed to facilitate automated flight planning, managing missions and data handling for the Intel Falcon 8+ drone – Topcon Edition and its available payload options.
The software is designed to increase accuracy with advanced mapping features that allow operators to easily set project parameters and prepare missions using presets for 2D areas such as polygon, corridor and city grid, as well as 3D structures like towers, buildings and facades.
“Operators can take advantage of 2D and 3D map views with the ability to import more precise project details and parameters, including restricted airspace, and support to adapt flight planning over difficult terrain,” said Charles Rihner, vice president of planning for Topcon Emerging Business.
“It features the ability to import elevation, KML, GeoTIFF and Shapefiles for real life visualizations targeted for accurate planning. Plus, expanded preset options support automated flight including circle of interest, panorama, and 2D and 3D missions with automatic elevation and terrain adoption,” Rihner said.
Additionally, the software includes automatic pre-flight safety and system checks while in mission planning. “Operators will receive detailed communication such as estimated battery life, airspace integration, ground and object safety limits, maximum dive and climb rate, minimum and maximum altitude, camera speed, number of images, camera storage, GSD check, and target photo coverage and quality,” Rihner said.
The flight-planning software is also designed to improve data handling and export to support easier data processing.
“It includes automated image matching and geotagging of images during data import, for increased time saving. Operators can preview and inspect the quality of the collected data, including individual images, as well as an overview of data coverage. Then, they can quickly and easily access and export flight data, and filter datasets for easier processing,” Rihner said.
2019 Aquatic Airshow participants at Androscoggin River in Auburn, Maine, on May 1. (Photo: Mario Martin-Alciati, USGS)
The U.S. Geological Survey (USGS) and independent scientists gathered this month in Auburn, Maine, to evaluate the use of sensor-mounted unmanned aircraft systems (UAS) to gauge stream stage, velocity, bathymetry and discharge.
The technology is being evaluated and modeled to determine whether it will support the fast, accurate and safe measurement of rivers, especially when they are flooded or contain floating trees, ice or other debris.
Close to two dozen hydrologic, geospatial and scientific experts gathered in what has been dubbed the “2019 Aquatic Airshow” to assess the technology. They were led by John Fulton of the USGS Colorado Water Science Center, Jack Eggleston of the USGS Water Mission Area Hydrologic Remote Sensing Branch, and Joe Adams and Sandy Brosnahan of the USGS National UAS Project Office.
The USGS Water Mission Area works with partners to monitor, assess, research and report on a wide range of water resources and conditions, including streamflow, groundwater, water quality, water use and water availability.
The testing involved equipping drones with noncontact sensors, including ground-penetrating radar for measuring river depths, doppler velocity radar and cameras with velocimetric analysis for measuring water surface velocities and calculating mean-channel velocities; and high-resolution cameras for photogrammetric mapping of surface topography and vegetation structure.
All the evaluated sensors were equipped with GNSS receivers; some with RTK correction capability. Most of the drones used were equipped with a low-grade inertial measurement units (IMUs) for navigation.
Team members from the USGS Water Science Centers in Colorado, New England and Virginia collected ground-truth river monitoring data with acoustic doppler current profilers deployed from a boat and multiple other surveying techniques to verify the accuracy of the drone-based stream data.
Woolpert Chief Scientist Qassim Abdullah was one of two scientists from the private sector asked to participate in the airshow. Abdullah has more than 40 years of experience in analytical photogrammetry, digital remote sensing, and civil and surveying engineering.
For the event, Abdullah devised a process in which the data collected by the drones underwent Pix4D triangular adjustment to produce three-dimensional models of the water surface and river edges to assist the modeling of river velocity using the drone-based doppler velocity radar and large-scale particle image velocimetry.
USGS scientists are in the process of evaluating the data and modeling produced by this testing to conclude whether this technology will prove beneficial.
Abdullah said the airshow was a success due to the varied contributions from each member of the team, their diverse backgrounds and their shared focus on water research.
“This was a great example of how a public-private partnership can work together to activate and elevate necessary, groundbreaking technologies to address worldwide issues,” Abdullah said. “Airshow team members brought different perspectives, processes and applications to the testing, which not only proved essential for this project but will help with many others moving forward. I love working with this group and look forward to continuing to help advance these vital technologies.
What technical and business challenges are getting your attention this year?
What are the most important benefits of, and the key challenges posed by, new modernized GNSS signals? How are you driving business in today’s economy?
What issues are you concerned about? What solutions hold the most promise for positioning, navigation and timing (PNT) in challenged and indoor environments — regardless of which technology provides them?
We want to know, and so does the rest of the industry.
GPS World is asking PNT professionals about the developing technology frontiers, the state of their business, the economic climate for products and services, driving market factors, the effects of jamming, the Issue of the Year — and more! Please give us your opinions in the 2019 State of the Industry survey. It should take less than 10 minutes, and your responses are confidential.
A handful of lucky participants drawn at random will win TWO $100 gift cards good (virtually) anywhere.
Complete the survey by June 30. Then look for a complete report of our findings in the September issue of GPS World.
Thank you for taking the time to share your feedback and help us improve our magazine content, industry awareness — and your own business!
While asking questions that have appeared in past State of the Industry surveys, to reveal industry changes that have taken place over the last five years, the 2019 Survey presents these new issues for your consideration:
• With multiple constellations, signals and services now beginning to emerge, what are the challenges to keeping open and seamless access to these in the international marketplace ?
• Among the many benefits of modernized signals, which is the most important in your field of work?
• Among the key challenges in utilizing modernized signals, which gets most of your attention?
The question above offers such answer choices as: increases die size without ability to increase chip cost; longer code sequences are difficult to acquire; increases RAM/ROM; increases number of RF channels; increases number of digital channels; higher CPU processing required; and software complexity with many signal types.
What one word would you use to describe your company’s No. 1 opportunity to grow in 2020?
What one word would you use to describe your company’s No. 1 obstacle to growth in 2020?
Overall, the 2019 Survey covers such topics as:
Technology Trends. PNT is rapidly diversifying among a number of complementary technologies, as GNSS looks to inertial, lidar, laser, cellular, WiFi and other beacons, signals of opportunity, low-Earth orbit satellite constellations and more. Different market sectors have, naturally, different requirements, and these lead to different integration combinations. Where do you see the most promise?
The Global Economy and how it affects business in your sector. Customers’ availability of capital to invest is top-of-mind for most industry professionals, whether designers, manufacturers, integrators, suppliers/dealers, or end users.
Industry Confidence in the road ahead. Sound business navigation requires a fluid, responsive combination of technology, capital, investment, and often most important, human capital. .
Issues of Concern. To what extent do industry leaders take into account the following as well as further factors?
Pricing and competitive issues;
GNSS jamming, spoofing, other RF interference;
Developing compatibility and interoperability of GNSS: GPS, GLONASS, BeiDou, Galileo;
Advantages and drawbacks of other positioning and navigation technologies.
The survey report, complete with insightful articles and infographics, will appear in the September issue. Look for it!
A Robinson R22 helicopter was converted by UAVOS to an unmanned drone. UAVOS — which specializes in the design, development and manufacturing of unmanned vehicles and autopilot systems — successfully completed in-air programmed missions with the unmanned helicopter.
The first flight this spring of the modernized helicopter lasted more than one hour and was performed in a fully self-piloted mode, reaching an altitude of up to 2,200 feet (670 meters). During the flight, all scheduled tests were performed including fully automatic take-off, enroute flight and landing. The tuning of UAV control settings was completed as well.
The converted R22-UV is serving as a platform for research and testing for commercial UAV options. For instance, upcoming test flights will include cargo delivery of up to 330 pounds (150 kg) in automatic mode. Flights with a duration of 6+ hours using additional fuel tanks and a payload for monitoring the land surface are also planned.
Besides that, UAVOS is planning to check operational limitations of the UAV during night flights and flights under severe weather conditions. A top priority is testing the possibility of using spraying equipment and to see whether R22-UV could serve agricultural purposes.
Components installed. The UAVOS components installed in R22-UV helicopter included autopilot, servo drives, sensor system and additional backup power supply. During the conversion, the aircraft electrical system was upgraded, manual control was removed, the fuselage was altered for servo drives and components of the automatic control system installation. In addition, the pilot seats were removed and replaced by additional fuel tanks.
Powered by a gasoline engine, the unmanned R22-UV helicopter is able to deliver cargo or carry payload with a total weight of up to 330 pounds (150 kg) with a maximum take-off weight of 1,400 pounds (635 kg).
Heavy payloads. The converted aircraft has a practical ceiling of 13,780 feet (4,200 meters) and has a top speed of 189 kph. The UAV is designed to carry high-precision, heavy professional equipment 88 pounds (40 kg and more) for a wide variety of missions including lidar, synthetic aperture radar, heavy optical equipment or gas analyzers.
The R22-UV can be operated in the regions without airfields, under severe weather conditions and during night-time, in the conditions with high stress risk for a pilot. The converted helicopter is useful for oil and gas companies that need to deliver cargo to hard-to-reach places, or where chemicals hazardous to humans are spread on the fields and forests. Operational limits for high-altitude flights and missions in heavy turbulence and high mountain regions should be defined after appropriate testing.
Toyota Research Institute-Advanced Development Inc. (TRI-AD) and Carmera Inc. have joined forces to conduct a proof of concept about developing camera-based automation of high-definition (HD) maps for urban and surface roads.
This is the first step towards realizing TRI-AD’s open software platform concept known as automated mapping platform (AMP) to support the scalability of highly automated driving, by combining data gathered from vehicles of participating companies to generate HD maps.
Automated driving requires highly reliable road information based on HD map data. While the creation of highway HD maps is underway, this coverage represents less than 1% of the worldwide road network.
The next challenge is to create and maintain maps for urban areas and local roads that go beyond the highway road network.
TRI-AD/Carmera mapmaking from vehicle cameras in downtown Tokyo. (Image: Toyota/Carmera)
In this proof of concept, the two companies will place cameras in Toyota test vehicles to collect data over several months from areas of downtown Tokyo. The cameras installed in the test vehicles use Toyota Safety Sense components that Toyota installs on its vehicles globally.
Images and other data gathered from TSS will be processed on Carmera’s real-time platform to automatically generate HD map data.
In addition, by placing commercially available dashcam drive recorders in Toyota test vehicles, the project will demonstrate automated map generation from a broader range of sources that do not have TSS.
This draws upon Carmera’s millions of miles of driving video collected, structured and enriched through safety monitoring partnerships with professional fleets in other complex environments like New York City.
Carmera feature detection image in downtown Tokyo. (Image: Toyota/Carmera)
By combining maps automatically generated via the techniques employed in this project with digital maps available today, it will be possible to provide even more reliable road information to automated vehicles in the future. And by generating HD maps based on data acquired from commercially available vehicles around the world, automated driving can be enabled on all roads.
“Currently automated driving map development relies on highly expensive specialized mapping vehicles deployed in limited numbers, and a lengthy manual process for reliable HD map creation,” said Mandali Khalesi, vice president of automated driving at TRI-AD. “We’re excited to partner with Carmera to automate HD map generation and help enable automated driving mobility for all.”
“Carmera was founded to deploy next-generation street intelligence at low cost, high speed and automotive-grade reliability, in order to democratize autonomous mobility at global scale,” Ro Gupta, CEO at Carmera, said. “We’re excited to collaborate with TRI-AD in putting the flexibility and modularity of our platform to work to build HD maps, beginning with one of the largest and most dynamic urban environments in the world.”
This year’s AUVSI Xponential show continued to demonstrate how large, thriving and visionary the UAV market is proving itself to be. With attendance around 8,000 people, an extensive technical program featuring more than 300 speakers, and a huge show floor displaying a wide range of sizes, configurations and applications, this was truly 2019’s place to be, see and — for the exhibitors — be seen.
On the large-format side,
an expanding test-range facility in North Dakota brings experimental capability to the oversize crowd,
Bell and Boeing are going full-tilt with large UAVs, both rotor and fixed-wing, and
a higher level market is emerging at 20 kilometers (12 miles, or 65,000 feet) above the Earth.
In the smaller-sized portion of the market, hydrogen fuel cells are extending operational time, and indoor inspections can be significantly cost- and time-reduced with new task-specific models.
Hurricane Irma response. Tuesday morning’s opening keynote featured an overview of how Florida Power and Light (FPL) and Precision Hawk undertook recovery inspections following Hurricane Irma in 2018.
This rang a bell for me, as Irma was the first hurricane I lived through; it passed 30–50 miles to the east of us, up the center of Florida.
FPL flew 4,000 miles with Precision Hawk drones, looking for downed and damaged transmission lines and blown transformers throughout its massive distribution network.
UAVs on the Show Floor
With roughly 800 exhibitors, it’s impossible to see everything, let alone talk with all the companies. So the following is a small subset from the show, with highlights from the large-format UAV sector and a few smaller ones. Further coverage of the show will appear in next month’s newsletter column.
The Bell Nexus demonstrator drew crowds at AUVSI Xponential 2019. (Photo: Tony Murfin)
Bell Helicopter. The Bell Nexus demonstration tilt-rotor – judging solely by the number of smartphone picture takers – was the hit of the show.
Nexus is gleaming blue, with six 8-foot tilt-rotors. The booth had a massive display screen in the back running a loop of its exploits, along with what seemed to be animations of future adventures — flying people around city-center skyscrapers.
Tail-sitter package delivery drone. (Photo: Tony Murfin)
This brings up lots of potential failure modes to be mitigated (six rotors rather than one regular helicopter rotor blade and a complex control system, for instance) for the Federal Aviation Administration (FAA) to chew on during the certification process.
A large four-tail package-carrying sitter drone for larger item deliveries took second place at the Bell booth, even though it is possibly closer to becoming a reality than the gleaming blue star of the show.
Boeing’s tilt-rotor UAV prototype recently flew its first test flight. (Photo: Boeing)
Boeing. Meanwhile, Boeing was apparently preparing to fly a prototype version of a tilt-rotor UAV, only Boeing’s is designed to be a heavy cargo lifter. The Cargo Air Vehicle prototype vehicle has six tilt-capable dual-rotor systems, weighs 1,100 pounds and is 17.5 x 20 x 5 feet tall. It’s interesting how similar the Bell and Boeing (production concept) configurations seem to be.
Boeing design concept for the Cargo Air Vehicle. (Image: Boeing)
Ballard. Most multi-rotors on UAVs are driven by electric motors, so battery capacity determines the duration of flying time. Ballard has developed the FCair hydrogen fuel cell, which can extend flight time to up to 90 minutes, almost three times that of lithium-ion battery-powered drones.
FCair 600W hydrogen fuel cell. (Photo: Ballard)
Insitu, AeroVironment, Lockheed-Martin, and others have flown the Ballard fuel-cell system; apparently this list also includes the U.S. Naval Research Laboratory and the Air Force.
Grand Sky. The Grand Sky Aviation Park in North Dakota is co-located within the 217 acres Grand Forks Air Force Base (AFB) and has FAA approval as a UAV beyond-visual-line-of-sight (BVLOS) test range.
North Dakota has invested more than $34 million in UAV efforts within the state, with a good chunk going towards the infrastructure at Grand Sky. Now only UAVs fly out of the facility, with Northrop Grumman and General Atomics making it an operational base for Global Hawk, Reaper and Predator drones.
One of the principal benefits is the ability to fly BVLOS operations for large drones at Grand Sky. The system uses two long-range primary radars, one at Grand Forks AFB and the other in Hillsboro, that can detect non-cooperative aircraft.
Harris RangeVue radar and Harris ADS-B sensors coupled with the Air Force’s DASR-11 radar enable BVLOS testing without using a chase plane or staying within line-of-sight. This enables 10–12 hour missions within the 30-mile, 18,000-foot BVLOS range, with continuous electronic monitoring by the ground-based radar system.
A new operational center is being built to house the integrated system and to provide access for visiting drone operators, and the BVLOS range is expected to be ultimately extended all the way to the Canadian border.
Flyability. The Elios 2 UAS system has evolved to include a rotatable thermal and high-definition visual camera payload, 10,000-lumen oblique lighting system, and reversible rotors that enable the UAV to back out of tricky situations.
A geodesic-like cage surrounding the drone makes it collision-tolerant and enables flight in restricted indoor areas such as refinery enclosures, mines, vats, cargo holds and nuclear containment vessels — anywhere, in fact, that inspections today are regularly conducted by people.
A typical nuclear plant inspection might cost $500,000, while this drone system costs around $35,000, and an inspection might take around 10 minutes. For traditional inspections, plants might have to go offline completely while people crawl around in extremely difficult, often dangerous spaces, and manual reports might take significant time to produce.
Flyability claims huge savings in inspection time with their system, as well as automated analysis and production of reports.
AeroVironment. Just before the show, SoftBank, Japan and AeroVironment held a press conference in Japan outlining their HAPSMobile Joint Venture to address the lack of communications access in many parts of the world. Almost 3.7 billion people, or half the world’s population, currently do not have internet access.
SoftBank wants to provide internet inexpensively, without the need for extensive ground infrastructure, by operating high-altitude pseudo-satellite (HAPS) UAVs. HAPS is expected to fly in the stratosphere at a 20-kilometer height for up to six months, powered by solar cells and equipped with payloads that enable direct connection to the internet for users on the ground.
Airborne-type certification and spectrum will be required for the uplink/downlink. Both present significant challenges, but HAPS suppliers, including Airbus, Facebook and others are joining the fight for spectrum. AeroVironment has a $65 million contract from HAPSMobile to develop and produce HAPS UAVs, and build of their Hawk 30 HAPS UAV is well underway.
HAPSMobile has also taken a minority $125 million position with Loon, which has been flying stratospheric balloons for several years, providing wireless coverage in Puerto Rico after Hurricane Irma, and network coverage in South America.
Other suppliers exploring the HAPS market at the show included Airbus, which displayed its Zephyr UAV and recently announced the opening of the Wyndham HAPS launch site in Western Australia; and UAVOS, which announced a new control system for its HAPS vehicle.
In addition, Boeing’s unmanned aircraft subsidiary, Aurora Flight Sciences, has already made significant claims about the capabilities of its own Odysseus HAPS UAV program.
Recapping the Recap. With many more exhibitors and limited time, the rest of the story from Chicago’s 2019 Xponential exhibition will have to wait till next month, to include show news from Sagetech, uAvionics, Sensefly, Fortem, Septentrio, NovAtel and others.
In sum, we see a wide range of different applications all benefiting from unmanned air vehicles of different types and configurations. A number of outfits are working the HAPS gamble, North Dakota’s BVLOS test-range expansion brings experimental capability to the oversize crowd, and Bell and Boeing are going full-tilt with large UAVs, both rotor and fixed-wing.
These developments clearly indicate that the UAS business continues to grow into a huge number of applications and to look very healthy.
Little Roady Shuttle to aid research on autonomous vehicle technology
Rhode Island officials have kicked off the Little Roady autonomous vehicle pilot project in Providence. The research project, which aims to evaluate autonomous mobility technology, begins service May 15.
The free service will be the focus of a research project to help the Rhode Island Department of Transportation (RIDOT) better understand the opportunities and challenges that come with integrating this new technology into its transportation planning. The research will help improve transit and provide information for communities, the workforce and policymakers.
The shuttles use a suite of sensors — including some from Middletown-based KVH Industries — and intelligent software to help the vehicle understand its environment and how to safely navigate through it.
The entire fleet has undergone 500 hours of testing both at Quonset Point this winter and in Providence this spring, which included detail mapping so the machines know every inch of its route and how to operate in a variety of traffic and weather conditions.
The Little Roady shuttles are provided by May Mobility Inc., which entered into a public-private partnership with RIDOT in the fall of 2018, following a competitive request-for-proposals (RFP) process.
“It’s always exciting when Rhode Island has an opportunity to lead the way in cutting-edge green technology,” said Governor Gina Raimondo. “This project will provide valuable data for states across the country as we move beyond conventional transit services to provide better, cleaner, and more accessible transportation for all.”
The experimental service will operate seven days a week, from 6:30 a.m. to 6:30 p.m., with 12 stops between Olneyville Square and Providence Station. The Little Roady shuttles will run on a continuous, 5.3-mile loop on low-speed roads with an average wait time of about 10 minutes. Trip time will be about 20-25 minutes each way from Providence Station to Olneyville Square.
“The kickoff of this service and research project is another achievement for the new DOT,” RIDOT Director Peter Alviti, Jr., said. “Our transportation agency has literally been rebuilt to effectively deliver safer roads and bridges while simultaneously studying and piloting new technologies. In doing so, we’ll keep Rhode Island well ahead of the curve for the transportation solutions of tomorrow.”
“By partnering with RIDOT, May Mobility is showing how our self-driving shuttles can be part of a sustainable future for communities,” said Edwin Olson, CEO and founder of May Mobility. “Our environmentally-friendly shuttles aren’t just fun-to-ride, they can increase access and convenience for a large number of people.”
The cost of the project, including the research component, is $1.2 million. This includes funding for an $800,000 public-private partnership with May Mobility, a $500,000 grant awarded by the R.I. Attorney General’s Office as part of a settlement with Volkswagen, federal research funds through the Federal Highway Administration, and matching state funds. RIDOT’s contract with May Mobility includes options to extend the service for an additional two years.
The debut of the autonomous vehicles is the latest step in a multi-agency effort called the Rhode Island Transportation Innovation Partnership (TRIP), which RIDOT launched in 2017. TRIP also includes a research component, with the goal of studying autonomous mobility solutions, ridership, workforce impacts, environmental impacts, and technology adoption, among others.
TRIP includes many partner agencies and governmental entities, including the City of Providence, the Rhode Island Public Transit Authority (RIPTA), the Rhode Island Division of Motor Vehicles and the Quonset Development Corporation. The research team is made up of representatives from Brown University, 3×3 Design, Stae, and Bits and Atoms.
May Mobility, a Michigan-based startup, is developing self-driving shuttles for college campuses, corporate clients, and central business districts. It launched a private corporate service in Detroit in June 2018 and a public service in Columbus, Ohio, in December 2018. It has also entered into an agreement for public service in Grand Rapids, Michigan. The company has hired fleet attendants and managers from Rhode Island and has set up a local operations office in Providence.
Featured photo: Rhode Island Department of Transportation (RIDOT).
Auterion and Impossible Aerospace are collaborating to bring to market the US-1 UAV, which has a two-hour flight time.
Auterion is the provider of Auterion Enterprise PX4, an open-source-based, enterprise operating system for drones. Impossible Aerospace is Silicon Valley, California-based drone manufacturer on a mission to assemble the highest performance electric aircraft.
“During critical public safety incidents, real-time intelligence from a UAV is extremely important. This is why the two-hour flight time of the US-1 is a clear necessity.” said Spencer Gore, CEO of Impossible Aerospace. “We turned to Auterion for software because their operating system is auditable and trusted for government applications.”
“Public safety organizations can now field a drone with government solicited, cyber-secure and trusted software that enables the drone to stream real-time footage to a command center,” said Kevin Sartori, co-founder of Auterion. “Choosing Auterion and its open-source, open-standards approach will greatly simplify the integration of the US-1 into the IT-infrastructure of public safety organizations.”
Thousands of professional drone pilots and businesses around the world count on open-source flight control software PX4, which was created by Auterion co-founder Lorenz Meier in 2011 and has evolved into a global developer community. Similar to Red Hat, Auterion builds the open-source infrastructure so that drone manufacturers can go to market faster with new products flying trusted software.
The US-1 quadcopter made its public safety debut in February with a California-based police force. The drone gives police agencies a new category of assets that sit between lower-end drones and police helicopters. This enables a wider usage of aerial imagery and reduces the cost for first responders at the same time.
Cepton Technologies Inc., a provider of 3D lidar solutions for automotive, industrial, security and mapping applications, has unveiled its newest lidar scanner, the SORA-P60L.
Part of Cepton’s SORA family of lidar scanners, the new scanner is purpose-built to deliver long-range, high-resolution imaging for unmanned aerial vehicles (UAVs).
The SORA-P60L offers a 400-Hz frame rate, enabling drones to fly faster while maintaining high point-cloud density. With a 550-gram payload, the SORA-P60L prolongs UAV flight time allowing more ground to be covered in a single trip, the company said.
Cepton’s unique Micro-Motion Technology faces all lasers downward at all times, providing a dense, uniform point cloud that, in combination with the high scan rate, makes it suitable for fixed-wing and fast-moving rotary-wing UAVs.
“Cepton’s SORA-P60L leads the lidar industry with its best-in-class point cloud density that provides superior imaging for UAVs,” said Neil Huntingdon, Cepton’s VP of business development. “With the affordable price point, long-range capabilities and high frame rate of SORA-P60L, UAVs can capture data faster and build more accurate maps. SORA-P60L is our first product from the SORA family that we have unveiled this year. We see a lot of opportunities for this unique sensor in other markets and have a number of products in development that will be revealed later this year.”