The U.S. Space Force transferred Satellite Control Authority of the GPS III Space Vehicle 07 (SV-07) to the 2nd Navigation Warfare Squadron, Mission Delta 31, at Schriever Space Force Base, Colorado. The satellite became operational and available to global users on Jan. 22, 2025 — expanding the GPS constellation to 31 active vehicles. The transfer is the first instance in which the Satellite Control Authority moved from the acquisition program to the operations squadron within a single Delta, reflecting the new mission delta structure.
The space vehicle was launched on Dec. 16, 2024, from Cape Canaveral Space Force Station, Florida, aboard a SpaceX Falcon 9 rocket as part of a Rapid Response Trailblazer mission. The operation involved retrieving an existing GPS III satellite from storage, expediting integration and launch vehicle preparation, and swiftly processing the satellite for launch.
The entire process, from initiation to launch, was completed in approximately three months, significantly shorter than the typical six-month pre-launch processing timeline. This accelerated timeline was achieved through collaboration between multiple Space Force organizations and partner agencies.
The GPS III SV-07 satellite is equipped with M-code, designed to improve anti-jamming and anti-spoofing capabilities, enhancing secure access to military GPS signals. This launch contributes to the ongoing modernization of the GPS constellation following the launch of GPS III SV06 in 2023. Mission Delta 31, activated on Oct. 15, 2024, is responsible for providing, operating, and sustaining high-integrity positioning, navigation and timing (PNT) capabilities. It comprises three squadrons and one detachment, including the 2nd Navigation Warfare Squadron, which operates the GPS satellite constellation.
In a recently released paper, the respected analytics firm London Economics determined that the presence of backup systems at the Denver and Dallas Fort Worth airports prevented any noticeable impacts on air travel despite each having experienced a disruption of GPS signals for 24 hours or more. By contrast, recent GPS interference at an airport without a backup system caused scheduled air service to be canceled until an alternative to GPS was established.
Also important to the lack of impact at Denver and Dallas was that the signals interfering with GPS, with a few minor exceptions, only impacted aircraft in the air.
GPS is essential for the safe and efficient movement of aircraft and support vehicles on the ground at airports, as well as the transport of crews, passengers, supplies, and cargo to and from airports, communication systems, and numerous other services.
Backups needed for both air and ground
Previous work by London Economics has shown that disruption of GPS for these ground functions would likely cause numerous flight delays and cancellations. Delays in the arrival of flight crews, passengers and supplies, for example, would quickly upset flight schedules. If this happened at a major airport, such as Denver or Dallas Fort Worth, disruptions could ripple through the entire air transport system. Wide-spread delays, cancellations and schedule adjustments would bog down air travel across the nation, if not the world.
The incident in Denver was caused by an accidental transmission from a government installation on Jan. 21. 2022. It impacted aircraft within approximately 50 nautical miles of the airport and lasted 33 hours before the source was identified and turned off.
The Dallas incident began on Oct. 17, 2022, and affected aircraft within about 110 nautical miles. It continued for 24 hours before ending on its own. The source has never been identified.
Reducing aviation backups may be a bad idea
In addition to recognizing the value of terrestrial navigation systems for aviation, the London Economics paper cautions about moves in the United States and Europe to “rationalize” these systems by reducing their number. In the event of longer or widespread GPS disruptions, the impact of an insufficient number of terrestrial systems could be significant. The cancellation of air service to an airport in Estonia because of chronic GPS jamming is used in the paper as a cautionary tale.
Instead of reducing the number of old backup systems, London Economics suggests policymakers consider establishing more widely available sources of terrestrial PNT. Taking a fresh look might identify alternative PNT sources for aviation that could also be used by other critical infrastructures. Perhaps even in consumer applications as well.
U.S. government representatives were approached for consultation and comment for this paper and expressed their willingness to participate. Unfortunately, they were unable to obtain permission to do so.
London Economics’ work on this effort was commissioned by the Resilient Navigation and Timing Foundation.
The paper “Aviation GPS Incidents Show Importance of Backup Systems. Policy Makers Take Note.” can be accessed from the foundation’s online library here.
Commander, Naval Surface Force, U.S. Pacific Fleet Vice Adm. Brendan McLane is rung in upon his arrival to the establishment ceremony for Unmanned Surface Vessel Squadron 3 (USVRON 3) on Naval Amphibious Base Coronado May 17, 2024. The squadron is comprised of unmanned Global Autonomous Reconnaissance Crafts (GARCs). The 16-foot GARCs built by Maritime Applied Physics Corporation enable research, testing, and operations that will allow integration throughout the surface, expeditionary, and joint maritime forces. (Photo: U.S. Navy photo by Mass Communication Specialist 1st Class Claire M. DuBois)
The U.S. Navy has created Unmanned Surface Vessel Squadron (USVRON) Three at Naval Amphibious Base Coronado. The squadron, equipped with Global Autonomous Reconnaissance Crafts (GARCs), aims to enhance the Navy’s capabilities by integrating unmanned systems into surface and joint maritime operations.
GARCs, developed by the Maritime Applied Physics Corporation, facilitate research, testing and operations for seamless integration across surface, expeditionary and joint maritime forces. These crafts will be used for various missions, including operations with carrier strike groups and surface action groups. Additionally, the squadron will introduce a new robotics warfare specialist rating to oversee and operate these systems.
The mission of USVRON Three is to provide the most powerful unmanned platforms in the maritime domain. The squadron will play a key role in establishing the knowledge needed to operate and maintain sUSV. It will develop tactics, techniques and procedures for small unmanned surface vessel (sUSV) operations and sustainment. USVRON Three’s motto is “Victory Through Ferocity.”
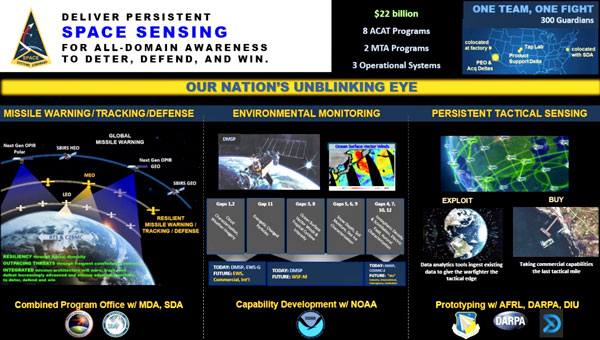
The Space Systems Command (SSC) Space Sensing program executive office, headquartered at Los Angeles Air Force Base in El Segundo, California, has delivered the first of two future operationally resilient ground evolution (FORGE) software deliveries to operations in the Overhead Persistent Infrared (OPIR) Battlespace Awareness Center (OBAC) at the Buckley Space Force Base in Colorado.
The integration of the FORGE framework into OBAC operations offers increased cyber resilience and enhanced mission applications to operators. OBAC operations on FORGE aim to boost OPIR battlespace awareness and technical intelligence missions with significant cyber-security improvements and enhanced missile detection and tracking.
Additionally, the operational trial period preparing for this delivery provided opportunities to stress the FORGE framework with real-world events. Notably, the framework performed in family with the legacy system, enabling the battlespace awareness and technical intelligence mission as the OBAC’s operational baseline.
FORGE provides OPIR data to operational warfighters and allows the U.S. Space Force to pivot toward a resilient missile warning, tracking and defense architecture. The FORGE ground system will support continued operations of legacy Space Based Infrared System (SBIRS), as well as the next generation of OPIR sensors including Next Gen OPIR GEO & Polar, and Resilient Missile Warning / Missile Track medium-Earth orbit (MEO) space systems. It has a cyber-resilient, flexible, scalable and government-owned open architecture to support the development, integration and delivery of OPIR processing applications for rapid response to emerging threats.
“Our nation’s ability to quickly sense and make sense of OPIR observations is crucial in maintaining decision-making advantage against adversarial threats and their advanced missile technologies,” said U.S. Space Force Col. Robert Davis, Space Force program executive officer for Space Sensing. “This effort enables target tracking earlier and for a longer duration, which significantly increases the event custody chain. Timely response to threats requires a modern architecture capable of hosting data from a range of new and legacy sensors that enables the development of applications to address these threats.”
The FORGE framework promotes open architectures designed to maximize the use of the OPIR constellation and allow for new capabilities to be added frequently and efficiently. It uses existing commercial off-the-shelf (COTS), government off-the-shelf (GOTS), and free or open-source software (FOSS) products to offer users a rapid pivot to new solutions depending on mission needs. This strategy enhances the opportunities for a broad range of vendors and strengthens the government’s access to the latest industry innovations, thereby increasing resiliency in the weapon system and industrial base, according to SSC.
Join the Resilient Navigation and Timing Foundation for a reception with the President’s National Space-based Positioning, Navigation, and Timing Advisory Board on April 23 at The Antlers Hotel in Colorado Springs. The event begins at 6:00 PM. General David Thompson, U.S. Space Force (retired) will discuss his experience as the first Vice Chief of Space Operations, the state of GPS, and the future of PNT.
For more information and to RSVP, contact [email protected] by April 17.
Hexagon’s Safety, Infrastructure & Geospatial division has partnered with Pitkin County Regional Emergency Dispatch Center to upgrade its digital mapping and response for 911 calls in Colorado’s premier mountain tourist destination. The partnership aims to make the county safer for residents and visitors.
By using HxGN Connect software, Pitkin County can bring modern mapping capabilities to its computer-aided dispatch (CAD) system, as well as incorporate Smart Advisor, Hexagon’s assistive artificial intelligence solution.
Pitkin County, home of Aspen and its four major ski areas, hosts 1.5 million tourists per year. The upgrades will improve emergency response capabilities for major events such as the X Games and JAS Aspen music festival, the company says.
The cloud-based solution, hosted in Microsoft Azure, is designed to map 911 calls and conduct long-term resource planning. Smart Advisor will work in the background to help dispatchers and first responders connect related incidents and provide geofencing to concentrate resources on large events. Officials plan to expand the system to take advantage of its cross-organization collaboration capabilities by potentially linking the county’s CAD system with the fire department’s network of mountaintop smoke detectors and the Department of Public Works’ snowplows.
Pitkin County dispatchers will use HxGN Connect for digital mapping within its CAD system in the mountainous tourist destination.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
By using location data and a username from a Lime rental scooter, police have identified a man caught on video scootering around a Denver, Colorado, neighborhood loading up on stolen goods from surrounding homes, reported 9 News. Police obtained a search warrant for the scooter’s location data and account information. The suspect appears to have used his real name when renting the scooter to conduct the burglaries. 9 News is not naming the man identified as the scooter user as he hasn’t been arrested or charged. However, a background check on his name revealed he’s currently wanted on two theft cases that occurred in 2022, also in Denver.
Doordashing goes wrong
Image: ProjectB/E+/Getty Images
A DoorDash driver followed his navigation system into a wooded area and then into a body of water while attempting to deliver an order to a residential neighborhood in Middleton, Massachusetts, reported the Daily Caller. After following the navigation system straight into water, the driver called police. The Middleton Police Department is now charging the DoorDash driver for “negligent operation of a motor vehicle” and has put in a request to suspend the driver’s license.
Researchers at the Jiangxi Nanfengmian National Nature Reserve in China are utilizing BeiDou during bird banding to monitor their migration period from September to October. Bird banding involves attaching customized tags to birds’ legs or wings to track their movements and patterns. Out of 614 birds, 36 are being equipped with specially designed positioning devices that will continuously transmit data for researchers to analyze migration routes, stopping places, and migration time, according to a nature reserve official.
More than 20 airline and corporate jets flying over Iran overnight on October 1, were targeted by spoofed GPS signals. The spoofed signals were sent from the ground, infiltrated the navigation systems of the jets, and steered them off course, reported The Times of India. According to the Ops Group, which runs a flight data intelligence crowdsourcing website, a majority of the GPS spoofing occurred in airway UM688 in Iran’s airspace. In response, the U.S. Federal Aviation Administration issued this warning to airlines: “Iraq/Azerbaijan — GPS jamming and spoofing poses safety risk.”
Geo Week 2024 is set for Feb. 11-13 at the Colorado Convention Center in Denver, Colorado. This event was created in response to the changing needs of built world and geospatial professionals, and to acknowledge the current convergence of technology.
Geo Week’s conference program and tradeshow floor will feature commercial applications of 3D technologies, innovations and case studies in the built environment, advanced airborne and terrestrial remote sensing solutions, smart products for a full project team and more.
Attendees and exhibitors can register here. The conference schedule can be found here.
ION GNSS+ 2023 has officially concluded. GPS World staff had the opportunity to stop by several booths, attend a variety of educational sessions, and connect with industry leaders and attendees. Below are some of the show highlights and pictures of the beautiful city of Denver.
All photos were taken by GPS World Editor-in-Chief, Matteo Luccio.
Educational sessions
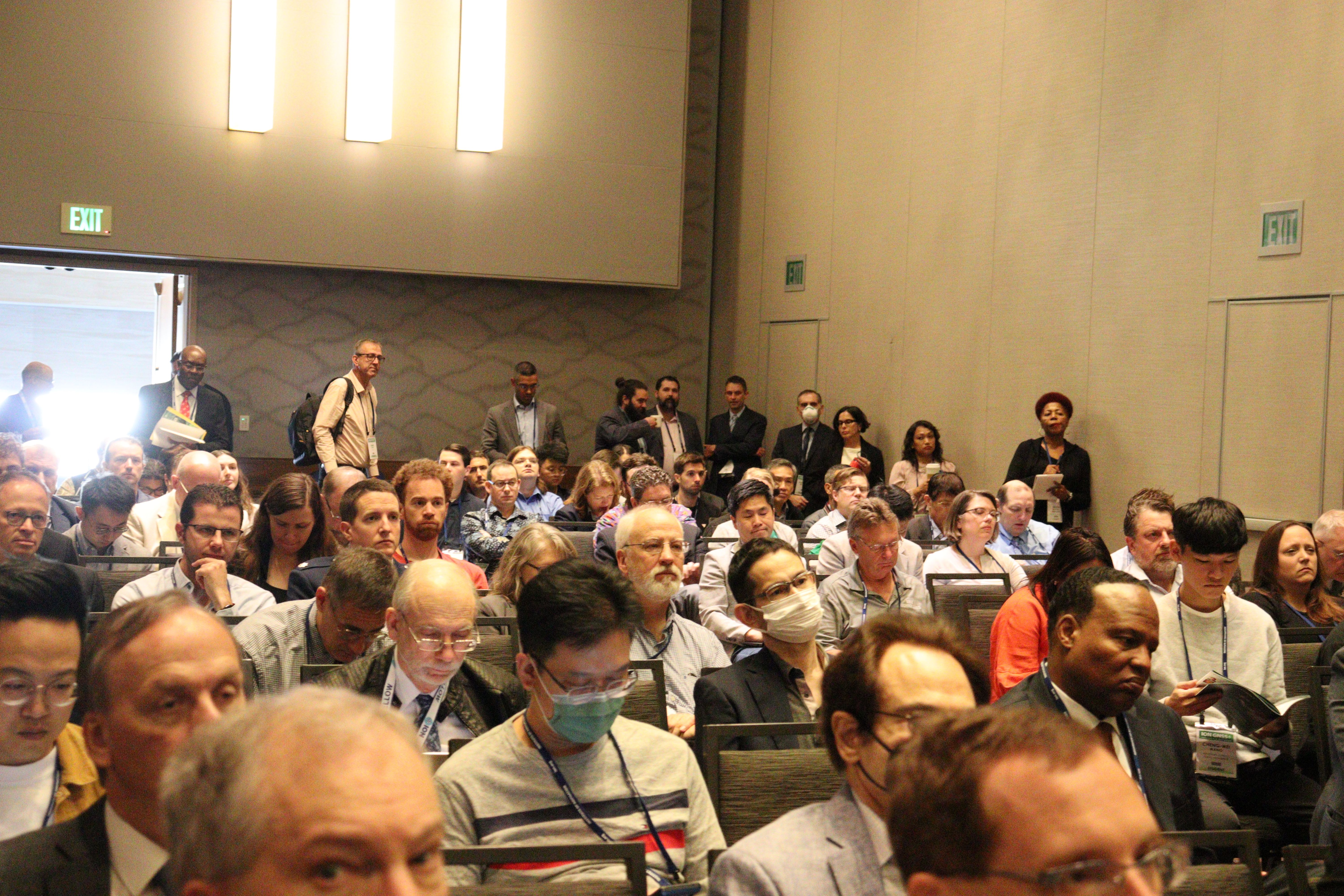
ION GNSS+ attendees gathered to hear a variety educational sessions offered throughout the conference.
Captain Scott Calhoun, Commanding Officer, U.S. Coast Guard Navigation Center (NAVCEN) and Deputy Chair of the Civil GPS Service Interface Committee.
On the first day of the conference, Dr. Tzu-Wei Fang, Space Scientist, National Oceanic & Atmospheric Administration (NOAA) Space Weather Prediction Center, spoke during the “Remote Sensing, Timing, Space and Scientific Applications” session.
Dr. Ignacio Fernández-Hernández, Galileo Authentication and High Accuracy Manager for the European Commission, presented during the “Trends in Future Satellite Navigation Technology, System Design and Development” educational session.
Scott Thompson-Buchanan, Chief Cartographer, National Park Service, discussed the program’s partnerships and future plans.
Dr. Robert Hampshire, Deputy Assistant Secretary for Research and Technology and Chief Science Officer,
U.S. Department of Transportation, gave the keynote address during the 63rd Civil GPS Service Interface Committee.
(From left to right) Colonel Andy Menshner, GPS Space and Ground (SML), Space Systems Command, U.S. Space Force; Lieutenant Colonel Robert Wray, Commander, Second Space Operations Squadron, U.S. Space Force; and Harold “Stormy” Martin, Director, National Coordination Office for Space-Based Positioning, Navigation, and Timing, during the Civil GPS Service Interface Committee.
Colonel Andy Menshner gave GPS acquisitions and development updates.
Panelists during the 63rd Civil GPS Service Interface Committee.
Click here to see more highlights from the 63rd Civil GPS Service Interface Committee, including the celebration of 50 years of GPS!
Matteo in the exhibit hall
GPS World staff met with our partners, contributors and readers on the show floor and at our booth.
The GPS World booth highlighted past magazine covers and our current issue of the magazine. Here, GPS World staff, Todd Miller (left) and Matteo Luccio (right), took the opportunity to meet with program leaders, partners and readers.
Harold “Stormy” Martin.
Adam Price, Vice President – PNT Simulation at Spirent Communications.
Dr Bradford Parkinson.
Kirstin Schauble and Gerhard Boiciuc, Anello Photonics.
Tim Waite and Mitchell McFee, GPS Networking.
GPS World‘s long-time contributor, Richard Langley.
Dr. Patricia Larkoski, The Mitre Corporation (left) and Nunzio Gambale, Founder and CEO of Locata (right).
Frank Van Diggelen, Google, and past President of ION.
GPS World Editorial Advisory Board member, John Fischer, Safran Navigation and Timing.
Chuck Stoffer (left) and Jeffery Sanders (right), UHU Technologies.
Gregory Turetzky, OneNav.
Karen Van Dyke, Director, PNT and Spectrum Management, U.S. Department of Transportation.
The beautiful city of Denver
ION GNSS+ 2023 took place in the heart of downtown Denver and came to a close on September 15. Beautiful blue skies and skyscrapers welcomed conference attendees from across the globe for the four-day event. Next year, ION GNSS+ is set to take place at the Hilton Baltimore Inner Harbor, Maryland.
ION GNSS+ 2023 is underway at the Hyatt Regency Denver at Colorado Convention Center. On the second day, industry leaders and show attendees gathered for the 63rd meeting of the Civil GPS Service Interface Committee. During a break, a cake was wheeled out to celebrate 50 years of GPS. GPS World staff wanted to highlight some key parts of the event.
(From left to right) Rick Hamilton, GPS Info Analysis Team Lead, U.S. Coast Guard; Harold “Stormy” Martin, Director,National Coordination Office for Space-Based Positioning, Navigation, and Timing; Dr. Bradford Parkinson, Edward Wells Professor, Emeritus, Aeronautics and Astronautics (Recalled), Co-Director, Center for Position, Navigation and Time, Stanford University; Capt. Scott Calhoun, Commanding Officer, U.S. Coast Guard Navigation Center (NAVCEN) and Karen Van Dyke Director, PNT and Spectrum Management, U.S. Department of Transportation, gathered around a cake to celebrate the 50th anniversary of GPS.
Image: Matteo Luccio
Image: Matteo Luccio
A closer look at the 50 years of GPS cake. Learn more about the history of GPS here.
Image: Matteo Luccio
Lt. Colonel Robert Wray, Commander, Second Space Operations Squadron, U.S. Space Force (second from left), who was featured on the May cover of GPS World. Click here to read our May cover story, featuring an exclusive interview with Lt. Colonel Wray about the training and duties of his team, the challenges they face, and more.
Image: Matteo Luccio
Dr. Bradford Parkinson(left) and Dr. Robert Hampshire, Deputy Assistant Secretary of Research and Technology and Chief Science Officer, U.S. Department of Transportation (right). Click here to learn more about Dr. Bradford Parkinson, who is nicknamed “The father of GPS.”
Image: Matteo Luccio
Col. Andy Menshner, GPS Space and Ground (SML), Space Systems Command, U.S. Space Force, speaking about GPS acquisitions and development updates during the Civil GPS Service Interface Committee.
Image: Matteo Luccio
(Second from left)Karen Van Dyke, Director, PNT and Spectrum Manager, U.S. Department of Transportation Deputy Chair, serves as chair of the 63rd Civil GPS Service Interface Committee. Read more from the Department of Transportation here.
Image: Matteo Luccio
Attendees gathered to hear speakers from the U.S. Department of Transportation, the U.S. Space Force, and other departments and agencies.
Click hereto stay up to date with our show coverage!
Institute of Navigation (ION) GNSS+ is the world’s largest technical meeting and showcase of GNSS technology, products and services. This year’s conference will bring together international leaders in GNSS and related positioning, navigation and timing fields to present new research, introduce new technologies, discuss current policy, demonstrate products and exchange ideas.
ION GNSS+ 2023 is scheduled for September 11-15, at the Hyatt Regency in Denver, Colorado.
GPS World, a proud media partner of ION GNSS+ 2023, will be attending the conference and will be located at booth 214 next to CAST Navigation.
If you are attending the conference, feel free to stop by the GPS World booth.
To view the full ION GNSS+ Technical Program click here.
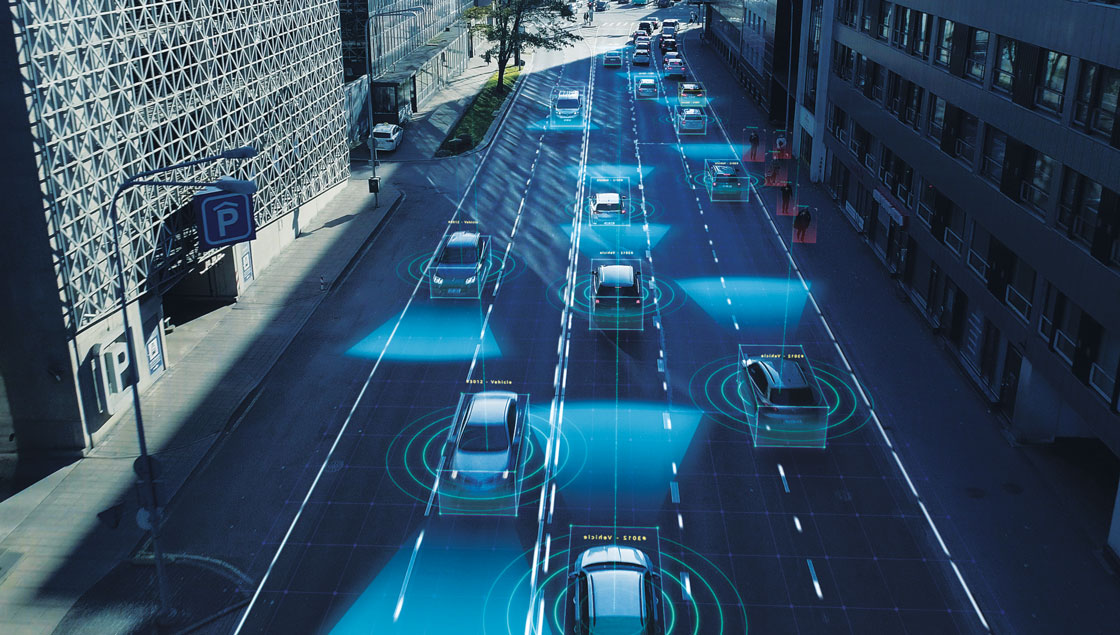
GNSS researchers presented hundreds of papers at the 2022 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 19–23, 2022 in Denver, Colorado, and virtually. The following four papers focused on autonomous applications in transportation. The papers are available here.
Addressing integrity monitoring of autonomous navigation
There are critical issues for the integrity monitoring of autonomous navigation applications, which include an adequate uncertainty budget in the observation domain, redundancy for the determination of the navigational states, and the capability of fault detection and exclusion.
Several aspects are addressed in the paper, including how to: determine interval bounds to handle GNSS multipath effects in urban environments, realize fault detection and exclusion based on constraint satisfaction and set membership, and improve the detector using weighting models.
The authors of the paper aim to contribute to the alternative integrity approach based on interval and set representations for bounding and propagating system uncertainty. Simulated and real-world experiments are carried out to demonstrate the feasibility of the authors’ proposed methods.
The authors note that statistical evaluation of integrity will not always suffice due to the presence of remaining systematic uncertainty, but state the alternative integrity approach will contribute to future autonomous navigation applications.
Su, Jingyao; Schön, Steffen; “Advances in Deterministic Approaches for Bounding Uncertainty and Integrity Monitoring of Autonomous Navigation.”
Estimation and reference systems in automation
For a high level of automation, estimation is crucial, and to achieve a full and reliable navigation evaluation, a trustable reference system needs to be developed.
Although the presence of a reference system and of an inertial measurement unit with GNSS through the multi-sensor fusion scheme was integrated, in GNSS-denied or challenging environment the navigation solution could not be accurately estimated and still needs to be fixed.
The authors of the paper propose new strategies to better estimate the lidar-based position uncertainty and to update the reference system.
The first strategy proposed involves determining the appropriate position error covariance matrix, based on the Hessian matrix and the scale of covariance obtained from a normal distribution transform (NDT) scan matching technique and the geometric dilution of precision computed from the distribution of point cloud segments in each scan.
In the second strategy proposed in the paper, the updated reference system was post-processed according to the loosely coupled INS/GNSS/NDT integration scheme with a forward and backward smoothing process.
The results of the proposed strategies indicated that the updated reference system provides more reliable navigation estimation compared to an existing reference system from commercial software and can be used for accurate evaluation of positioning, navigation and timing with automated vehicle applications.
Srinara, Surachet; Chiu, Yu-Ting; “Adaptive Covariance Estimation of Lidar-Based Positioning Error for Multi-Sensor Fusion Scheme with Autonomous Vehicular Navigation System.”
Evaluating TerraStar-X
GNSS performance using typical, low-cost GNSS devices in vehicles is not enough to achieve the positioning and availability needed for lane-level accuracy on autonomous vehicles. The antenna and receiver hardware available in standard vehicles limits the position accuracy and convergence performance. These limitations make the positioning more susceptible to error sources such as receiver multipath, noise, carrier tracking and stability.
GNSS correction services with additional design considerations and sophisticated algorithms are needed to work within the constraints of automotive-grade GNSS devices to achieve the performance required for lane-level positioning.
TerraStar X technology from NovAtel enables these applications. It includes an orbit and clock determination system (OCDS), which produces a set of corrections, precise satellite orbits and clocks, and satellite-specific biases for individual signals augmented by the computation of additional regional corrections.
The authors of the paper outline the design and performance of the combined OCDS and regional correction system. They demonstrate the performance of the TerraStar X technology across a variety of applications.
The addition of regional corrections enables automotive and mass-market applications to achieve in-lane positioning in seconds, using any dual-frequency, dual-constellation GNSS hardware. The result is software that provides a continuous stream of multi-constellation, multi-frequency GNSS corrections — enabling a correction service that makes the affordable GNSS device ecosystem possible.
Regional corrections also improve the performance of survey-grade GNSS receivers.
Mervart, Leos; Lukes, Zdenek; Alves, Paul; “TerraStar X Technology: Design of GNSS Corrections for Instantaneous Lane-Level Accuracy on Large Scale Connected Vehicles and Devices.”
Solving the localization problem in autonomous driving
The localization problem in autonomous driving imposes two criteria on the navigation solution: accuracy and reliability or integrity. According to the authors of this paper, solving the localization problem is a key requirement to enabling the development of autonomous platforms.
This paper presents AUTO, a real-time integrated navigation system that tightly integrates INS, GNSS-RTK, odometer, and multiple radars sensors with high-definition maps to achieve a high-rate, accurate, continuous, and reliable navigation solution. It also shows how AUTO leverages a tight integration of imaging radars with other traditional sensors to provide a robust navigation solution with corresponding estimates of the uncertainty.
The AUTO solution was tested in a variety of environments and locations, including a range of conditions such as winter weather, to assure the robustness and reliability required by autonomous applications.
The results demonstrate the lane level accuracy of the solution in a variety of challenging urban and downtown environments. Additionally, the tight integration enables the determination of protection levels to describe upper bounds on the uncertainty.
The results in the paper are illustrated using a Stanford Diagram, along with a user-defined alert limit to describe the solution integrity and availability. The proposed algorithm uses a map matching technique between the imaging radar data and a globally referenced high-definition map to better estimate the solution uncertainty and protection levels.
AUTO’s tightly integrated approach to integrity monitoring means uncertainties and protection levels can be determined even in areas where the system may experience extended periods of GNSS unavailability.
Krupity, Dylan; Chan, Billy; Ali, Abdelrahman; Salib, Abanob; Georgy, Jacques; Goodall, Christopher; “Integrity Monitoring and Uncertainty Estimation with AUTO’s Non-linear Integration of Multiple Imaging Radars and INS/GNSS for Autonomous Vehicles and Robots.”


























 Frank Van Diggelen, Google, and past President of ION.
Frank Van Diggelen, Google, and past President of ION. GPS World Editorial Advisory Board member, John Fischer, Safran Navigation and Timing.
GPS World Editorial Advisory Board member, John Fischer, Safran Navigation and Timing. Chuck Stoffer (left) and Jeffery Sanders (right), UHU Technologies.
Chuck Stoffer (left) and Jeffery Sanders (right), UHU Technologies.