High-precision GPS/INS receiver is now available with a single-antenna option for faster integration, lighter weight and lower power consumption.
Photo: Septentrio
Septentrio’s GPS/INS receiver is now available with a single-antenna option. The single-antenna receiver brings the possibility of robust centimeter positioning and 3D attitude (heading, roll, pitch), while keeping weight and power consumption to a minimum. For Septentrio customers, this means simplified integration as well as increased operation time and productivity.
Septentrio centimeter-level positioning is based on multi-frequency, multi-constellation GNSS (GPS, GLONASS, Galileo, BeiDou, QZSS) technology. AsteRx-i S combines GNSS and an industry-grade inertial measurement unit (IMU) to deliver precise positioning together with 3D attitude and coasting functionality.
Septentrio’s unique GNSS/IMU integration algorithm enables continuous positioning in difficult environments such as near high structures, under foliage or during short GNSS outages (this is referred to as coasting or dead reckoning).
This makes AsteRx-i S a suitable positioning solution for robotics, autonomous vehicles and logistics. Previously available only as a dual-antenna product, AsteRx-i S is now available with either a single- or a dual-antenna option.
“By strengthening our GPS/INS integration portfolio we continue building upon our strategy of bringing reliable precise positioning together with 3D attitude to challenging industrial environments such as container parks or tree plantations,” said Danilo Sabbatini, product manager at Septentrio.
“AsteRx-i S has now become even more versatile with the support of both single and dual antenna operations on the same hardware platform,” Sabbatini said. “With the single-antenna AsteRx-i S delivers accurate 3D attitude in small-size applications where weight and power consumption are critical, while the dual antenna option is still the best solution for applications requiring short initialization time.”
Small, light, low power. The single-antenna AsteRx-i S requires minimal space which makes it suitable for robotic devices looking for small and light precise positioning solutions. Since only one antenna is required, there is less weight and lower power consumption, resulting in extended battery life. The dual antenna AsteRx-i S, on the other hand, is the best solution for devices requiring quick heading initialization and devices with prolonged static operation.
Advanced Interference Mitigation. AsteRx-i S comes with built-in Advanced Interference Mitigation (AIM+) technology. In robotic devices neighboring electronics can emit electromagnetic radiation which interfere with GNSS signals. AIM+ offers protection against such interference resulting in faster set-up times and robust continuous operation. A built-in power spectrum plot allows users to analyze interference, helping locate its source and mitigating it.
By offering both single and dual antenna options, Septentrio is now able to better accommodate specific needs of their customers interested in a GNSS/INS solution.
Trimble Catalyst On Demand enables automated domain-level email address access, which streamlines license allocation for organizations with a large number of users. (Photo: Allison Barwacz)
Trimble’s Catalyst software-defined Global Navigation Satellite System (GNSS) receiver for Android phones and tablets is now available with a usage-based service plan: Trimble Catalyst On Demand.
According to the company, the new service plan is focused on satisfying the requirements of a growing number of industries and organizations who recognize the benefits of using high-accuracy GNSS technology in the field, but need a more flexible payment model.
Trimble Catalyst On Demand provides scalable access to RTK-quality GNSS positioning using an affordable pay-per-use hourly pricing model in addition to the current Catalyst monthly plans, the company added. The service also enables automated domain-level email address access, which streamlines license allocation for organizations with a large number of users.
“Catalyst On Demand is Trimble’s response to the growing number of individuals and organizations needing flexible access to high-accuracy GNSS technology,” said Rachel Blair Winkler, business area manager, mapping and GIS, for Trimble. “By providing a usage-based payment model for Catalyst, we are empowering more users inside and outside the geospatial profession to record positions, navigate to points, measure relative distance and create digital maps. This results in better work and better decisions.”
Trimble Catalyst service subscriptions and the Catalyst DA1 antenna are available through Trimble’s Authorized GIS Distribution Network.
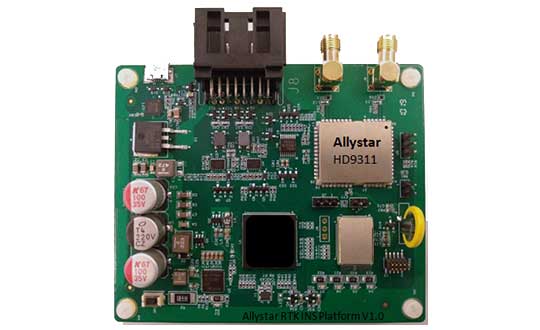
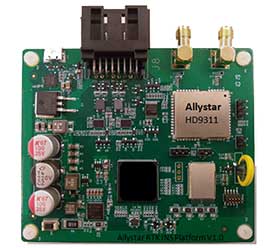
The Allystar INS Platform — the company’s latest technology — is a dual-antenna, multi-frequency, multi-GNSS inertial navigation system (INS) that delivers accurate and reliable position, velocity and orientation, the company said.
It is designed for a wide range of autonomous vehicle applications under the most demanding conditions.
The Allystar INS Platform combines high-grade, six-axis, temperature-calibrated accelerometers and gyroscopes with a multi-frequency, multi-GNSS engine, the HD9300 series. HD9300 is a dual-antenna chip-grade real-time kinematic (RTK) GNSS receiver for accurate positioning and heading.
GNSS-aided inertial navigation systems are widely used in autonomous vehicles. However, high-accuracy multi-frequency multi-GNSS receivers are usually too expensive for mass-market applications. The Allystar HD9300 series is a mass-market multi-band chip-grade receiver that concurrently support all civil bands in all GNSS constellations (GPS/QZS L1&L2&L5&L6, BDS B1&B2&B3, GAL E1&E5, GLO L1OF/L2OF) with an integrated RTK engine to achieve centimeter-level accuracy.
The Allystar INS platform contains an on-board sensor-fusion filter, navigation and calibration algorithms for different dynamic motions of land vehicles. Key features include:
multi-band multi-GNSS chip-grade receiver
dual antennas
integrated RTK engine (up to 2 centimeters)
100-hz update rate
OBD data adapter.
Allystar OBD Data Adaptor V1. (Photo: Allystar)
The Allystar OBD Data Adapter (v1.0) enables users to read and monitor various sensors built into cars, obtaining the real-time vehicle speed and gear signals from the OBD interface, and then output AT commands by serial port or SPI. When connected to the Allystar RTK INS platform, the adapter allows for outstanding navigation accuracy, especially in urban areas, helping to increase accuracy and reduce position drift.
An evaluation kit — including platform board, antenna and OBD adaptor — will be available in August.
The survey team set up the base station in Everest base camp. (Photo: Tshiring Jangbu Sherpa via Nepal24hours.com)
A Nepali survey team made a successful ascent of Mount Everest to measure its official height.
This is the first height survey conducted by the government of Nepal. The precise height of Mount Everest — now listed as 29,029 feet, or 8,848 meters — has been contested since the first survey by British officers in 1849.
Nepal plans to end the controversy and declare both snow and rock height of the world’s tallest mountain.
Chief Survey Officer Khimlal Gautam and surveyor Rabin Karki reached the peak of Mt. Everest on May 22 at 3 a.m. local time and collected data from a Trimble R10 GNSS receiver gifted from New Zealand.
The surveyors stayed atop the peak for about 1 hour, 16 minutes, according to Nepal24hours.com.
The final result of the official height measurement of Mt.Everest is expected within the next six months.
“To make the observation of data on GNSS we spent one hour and 16 minutes in the summit which was a very challenging and trying time for us,” Gautam said. “We faced extreme difficulty mainly while descending from the summit.”
According to Tshering Janbu Sherpa, guide leader of the survey team, the team faced difficulties because of the exhaustion of oxygen of one member, who was rescued during the descent.
Besides a GNSS survey at the summit, teams conducted precise leveling, trigonometric leveling and gravity surveys. The GNSS survey will cover 285 points with 12 different observation stations, nine of which are in hills of Sankhuwasava, Bhojpur and Solukhumbu districts.
Microchip Technology Inc., via its Microsemi subsidiary, has added the TimeProvider 4100 Release 2.0 to its Precision Time Protocol (PTP) PackeTime portfolio.
TimeProvider keeps services operating through GNSS lapses due to vulnerabilities such as jamming, spoofing or loss of signal. It is also designed to meet one of the biggest 5G network deployment challenges —synchronizing higher volumes of more densely packed base stations.
Microchip is also introducing Release 3.0 to its Integrated GNSS Master (IGM) family.
TimeProvider 4100. Release 2.0 adds 10 Gigabit Ethernet support, a boundary clock operation mode that lowers operational costs, and other enhancements to improve how timing flows are distributed from multiple sources to a network’s base stations and other endpoints.
The 72-channel GNSS receiver coupled with Microsemi’s patented active thermal compensation technology provides excellent accuracy of <10 ns RMS to UTC (USNO). With the time source provided through GNSS satellite input, it is essential to provide flexible support for constellations of choice depending on the region. TimeProvider 4100 supports GPS, GLONASS, BeiDou, Galileo, QZSS, and SBAS in its standard version.
TimeProvider 4100 2.0 with its 10 GE expansion module has been selected by SK Telecom in Korea for its delivery of 5G services in the Seoul metropolitan area and Chungcheong province.
IGM 3.0. For service providers that need to deploy more compact PTP 1588 v2 Grandmasters to fewer base stations closer to the network’s edge, Microchip is also introducing Release 3.0 to its Integrated GNSS Master (IGM) family.
IGM 3.0 combines an IEEE-1588v2 PTP grandmaster with a GNSS receiver and antenna to simplify indoor or outdoor installations. Each of the three IGM 3.0 additions deliver precise time and phase as well as new capabilities enabled by IGM Plus hardware models with enhanced oscillators and GNSS receivers.
The new oscillator options extend time-keeping holdover performance while the enhanced receiver speeds satellite signal acquisition and improves security by accessing more GNSS constellations simultaneously.
The receiver upgrade option supports GPS, Galileo, QZSS and GLONASS, and is Beidou-ready. The IGM 3.0 software includes higher PTP capacity to 60 clients along with IPv6 support for traffic and management flows.
TimeProvider’s Gateway Clock. Extending the TimeProvider 4100’s Gateway Clock operation mode with Microchip’s high-performance boundary clock (HP-BC) operation mode enables it to support the latest high-accuracy ITU-T Class C & D boundary clock standards. These standards dictate extremely accurate time transfer over optical networks so operators can use dense wavelength division multiplexing (DWDM) technology rather than dedicated fiber.
Release 2.0 accommodates escalating bandwidth requirements of next-generation network devices through an optional expansion module that provides 10 GE interfaces. Expanded monitoring functions enable service providers to understand how time and phase performance is affected by network elements, the company added.
PTP client capacity has been increased to 790 to provide the scalability that is critical for deployments in mobile network aggregation layers and new DOCSIS 3.1 Remote-PHY cable architectures.
Both TimeProvider 4100 Release 2.0 and IGM Release 3.0 are managed with TimePictra, the centralized and unified management platform for the company’s family of precise timing systems.
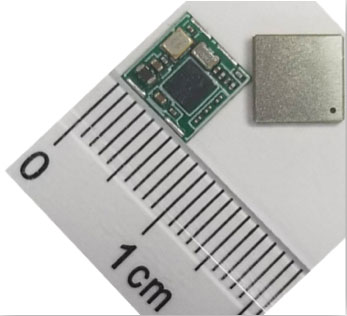
JEDI-200 reduces the energy of getting one position fix by up to 150 times, according to the company.
Photo: Kolmostar
Kolmostar, a positioning technology company, has launched an ultra-low-power GNSS module at IoT World, which took place May 13-16 in Santa Clara, California.
JEDI-200 reduces the energy for one position fix by up to 150x compared to traditional GNSS sensors, providing a positioning solution for location-based internet-of-things applications, the company said.
1-second ultra-fast time to first fix from cold start
2-meter CEP high positioning accuracy
Supports GPS and Beidou constellations
100-byte compressed ephemeris (EPH) to enable A-GPS with speedy download via LPWAN technologies such as LoRaWAN and NBIoT
High-performance cloud computing based on 50-byte raw position files for optimized radio transmission efficiency and minimum endpoint power consumption
Integrated SAW filter, stand-alone LNA and TCXO
12 x 16 millimeter form factor for easy RF integration
“JEDI-200 supports GPS as well as Beidou constellations,” said Tao Tong, co-founder and CEO of Kolmostar. “While achieving industry’s lowest power consumption, it helps our customers to achieve high accuracy even in dense urban canyon environment where existing GNSS modules on the market often drift due to multipath and other errors.”
The JEDI-200 is designed specifically for IoT applications such as human and asset trackers (for bikes, scooters, vehicles, cargo, livestock, pets and more), smart wearables, smart farming and infrastructures,.
Its reduced level of power consumption and its optimized efficiency with LPWAN technologies solve IoT endpoint deployment’s pain-point of needing frequent recharges or a large battery, enabling new possibilities in location-based IoT applications.
A roundup of recent products in the GNSS and inertial positioning industry from the April 2019 issue of GPS World magazine.
OEM
GNSS receiver
With embedded 9-DOF IMU
Photo: Rokubun
The Argonaut GNSS receiver is able to provide geo-location with real-time accuracy of 2 meters and off-line accuracy better than 0.4 meters using Argonaut PaaS. This is possible because GNSS raw measurements, together with inertial measurement unit (IMU) nine-degrees-of-freedom (9-DOF) measurements, are stored for offline GNSS processing (PPK, RTK, DGNSS). Argonaut will also register external events such as camera triggers within microsecond resolution and decimetric geo-location accuracy. The embedded IMU allows for an increased rate of navigation fixes as well as robust solutions in scenarios with impaired GNSS availability. Rokubun, rokubun.cat
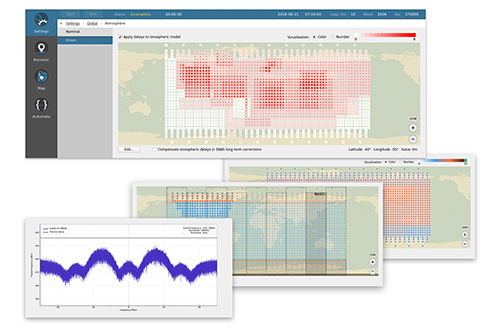
Galileo AltBOC addition
Plus atmospheric corrections
Photo: Skydel Solutions
SDX GNSS simulator update version 19.1 adds Galileo AltBOC signal generation, new atmospheric errors, SBAS improvements and SV antenna patterns. SDX users licensed with the Galileo E5 signal will be able to generate 8 Phase Shift Keying (8-PSK) constant envelope AltBOC after upgrading to SDX 19.1. Version 19.1 also adds a new error type to all SDX users: atmospheric delays. These errors can be compensated for with the SBAS option installed. Skydel Solutions, skydelsolutions.com
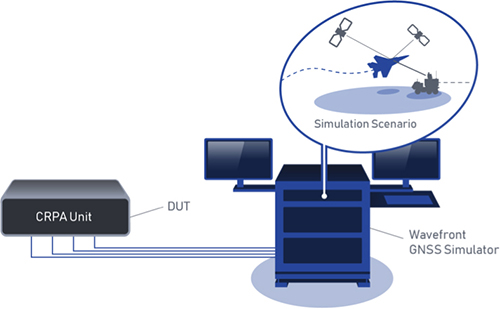
Wavefront simulator
Added to software-defined platform
Photo: Skydel Solutions
The BroadSim Wavefront Simulator is a new addition to Skydel’s software-defined platform. The BroadSim Wavefront further extends the capabilities achieved by BroadSim Anechoic, incorporating support for controlled radiation pattern antenna (CRPA) and multi-element receiver testing. Powered by Skydel SDX, the simulator’s features include phase-coherent simulation, real-time automated phase calibration, scalability from 4 to 16 elements, and advanced jamming and spoofing scenarios. Talen-X, www.talen-x.com
GNSS antenna
For high-precision and autonomous applications
Photo: Maxtena
The M7HCT-A-SMA is a high-accuracy, multi-frequency active quadrifilar helix GNSS antenna designed for high-precision and autonomous multi-frequency applications. The design offers concurrent GNSS reception on L1 (GPS, GLONASS, Galileo, Beidou) and L2 (GPS L2C, Galileo E5B and GLONASS L3OC) in a rugged, compact and ultra lightweight form factor. The antenna is designed for GIS, RTK and other high-accuracy GNSS applications such as the drone and automotive markets. Helicore technology provides exceptional pattern control, polarization purity and high efficiency in a 25-gram form factor. The antenna offers up to 30-dB gain for GNSS applications in one radome housing with a single SMA connector. Maxtena, maxtena.com
Portable simulation
Solution for field-test requirements
Photo: CAST Navigation
The CAST-1000 duplicates GPS RF signals and uses dual-frequency signal generation technology. This allows for duplicate testing in the laboratory or the field and real-time or configured control. The CAST-1000 is mobile and portable, which makes it the ideal solution for field test requirements. Producing GPS and GLONASS signals with up to 12 satellites in view, the CAST-1000 simulates signals for satellites of P code on L1 and L2 and C/A code on L1. The GPS RF signal is dual-frequency and has a 12-channel configuration for any combination of visible space vehicles. The system is highly programmable — operators can choose from an array of vehicle types and replicate dynamic motion for all kinds of vehicles, from terrestrial to aquatic, airborne to space-based. By utilizing 6-DOF dynamic profile data collected in the field and through profile configuration, a trajectory can be created. The CAST-1000 also features a performance evaluation module, allowing for comparisons between raw and filtered data. CAST Navigation, www.castnav.com
Survey & Mapping
Graphing software
New plotting features
Photo: Golden Software
Version 14 of the Grapher scientific graphing package offers new plotting and customizing functionality based on user feedback. The Grapher software gives users deeper insights into their data by providing them with 80 flexible and easy-to-use 2D and 3D graphing tools for plotting, analyzing and displaying scientific data sets. The package is used extensively by scientists and engineers in oil & gas operations, hydrologic/geochemical studies, environmental consulting, mineral exploration and academic research. New or upgraded features include Enhanced Plotting (the ability to plot data in rows and columns, perform one-button Durov class plots, and easily generate multi-plot reports); and Improved Bar Charts (bar charts are more versatile, offering variable bar widths and differentiated fill colors for negative and positive). Golden Software, www.goldensoftware.com
GIS software update
New lidar functionality
Photo: Blue Marble Geographics
Global Mapper version 20.1 offers new and updated geospatial tools, as well as performance improvements throughout the application. Enhancements to version 20.1 include a new zooming function in the path profile window, a digitizer tool for automatically closing gaps between features and, for lidar module users, a point proximity query function. Blue Marble Geographics, www.bluemarblegeo.com
Survey application
For the geospatial industry
Photo: Global GNSS
The GNSS Surveyor mobile application provides location information and quality position data in real time with sub-meter to centimeter accuracy. It connects to any external GNSS receiver via Bluetooth. Features include a one-touch configured command to communicate directly with the GNSS Bluetooth device; location information and quality of the position data in real time with centimeter accuracy; GPS data such as position, height, satellites and velocity; and constellation information for GPS, GLONASS, Galileo, BeiDou, QZSS and SBAS satellites. It also includes a direct IP feature for real-time kinematic (RTK) corrections data. An internal NTRIP client loads RTCM data from the internet. Location information is collected as latitude and longitude, altitude, speed or pace, bearing and UTC time. GNSS precision includes global coverage, centimeter-level accuracy, fast time to first fix, multi-constellation and multi-band, and highest security. Navigation uses include ground robotics navigation, lane-level navigation, heavy machine navigation, industrial navigation and tracking, and commercial UAV. Global GNSS, globalgnss.com
Indoor mapping
Slam technology removes point cloud artifacts
Photo: NavVis
The SLAM-based NavVis M6 Indoor Mobile Mapping System (IMMS) now automatically detects and removes point cloud artifacts, including moving objects in static scenes. The latest IMMS release removes artifacts from point clouds during the post-processing of scan data (see before and after image above). Fringe points and dynamic objects are two common types of point cloud artifacts that affect all 3D laser scanning devices. The NavVis M6 IMMS uses laser scanners to capture a high volume of measurement points of an environment. With the latest software update, the algorithms applied during the post-processing of scan data uses the multiple observations to detect whether measurement points actually exist in the physical space. If it is determined that the point does not exist and is instead resulting from the laser beam hitting an edge or an object moving through the space, this point is automatically removed. The result is a much cleaner, crisper point cloud that requires less clean-up time in point-cloud editing software and that is easier to use for applications such as BIM modeling. NavVis, www.navvis.com
Mobile & UAV
Adventure handhelds
Larger display, improved access to Satellite imagery
Photo: Garmin
Garmin has updated two premium adventure-oriented handhelds, the GPSMAP 66s and the GPSMAP 66st, with expanded wireless connectivity, direct-to-device access to BirdsEye satellite imagery, weather forecasting and a larger 3-inch sunlight-readable color display. The GPSMAP 66st offers preloaded topographic maps for U.S. and Canada, with detail of coastlines, rivers, summits, terrain contours and geographical points. Connectivity to the new Garmin Explore app and the BirdsEye Satellite Imagery (no annual subscription) bring high-resolution photo-realistic route views. Weather updates come via Bluetooth to a compatible mobile device. The Explore app includes features for outdoor navigation, trip planning, mapping and data sharing. Features include multi-GNSS satellite support and altimeter, barometer and compass sensor capabilities; 16 hours of battery life in full GPS mode; LED flashlight and SOS beacon; built to military standards for thermal, shock and water performance (MIL-STD-810G); RINEX data logging that enables sub-meter accuracy of GPS position after post processing. Garmin, garmin.com
RTK Hexacopter
Integrated GNSS improves accuracy
Photo: Yuneec International
The H520 hexacopter is now available with a real-time kinematic (RTK) system. The fully integrated RTK satellite navigation enables extremely accurate recurring images and faster 3D mapping. It also makes automated inspection flights easier and more precise. The H520 RTK is suitable for commercial applications that require maximum precision. By using RTK technology, the H520 can now fly much closer to objects for inspection because the UAV positions itself precisely in the centimeter range (1 cm + ppm horizontal / 1.5 cm + ppm vertical) rather than in the meter range, which is standard for the H520. Yuneec International, us.yuneec.com
Web-based data service
Enables sharing of UAV data sets
MAGNET Collage Web is a web-based service enabling the sharing and collaboration of UAV and scanning data sets. Version 1.3 allows operators to work with more types of data with greater flexibility, including the ability to import BIM models, as well as CAD and GIS data. It can be used to overlay as-built laser scans and design data to visualize proposed changes and detect construction issues. The software supports OBJ, FBX and 3DS formats. The upgrade also includes new direct publishing functionality for CAD and GIS data files through the browser. Topcon, topconpositioning.com
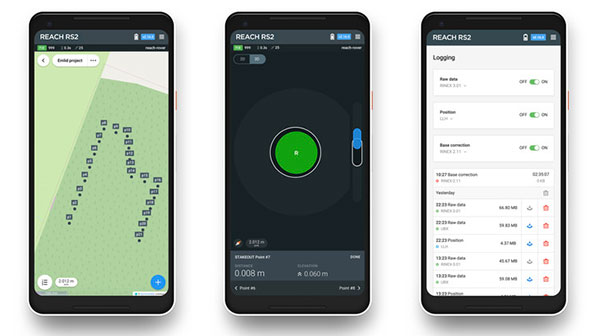
Emlid, the creators of Reach, centimeter-accurate RTK GNSS receiver, is now taking pre-orders for its multi-band GNSS receiver Reach RS2. The new receiver features a built-in LoRa radio, a 3.5G modem, and a survey app for iOS and Android.
Photo: Emlid
L1/L2/L5 RTK GNSS receiver with centimeter precision. Reach RS2 determines a fixed solution in seconds and provides positional accuracy down to several millimeters. The receiver tracks GPS/QZSS (L1, L2), GLONASS (L1, L2), BeiDou (B1, B2), Galileo (E1, E5) and SBAS (L1C/A), and reliably works in RTK mode on distances up to 60 kilometers and 100 kilometers in PPK mode. A multi-feed antenna with multipath rejection offers robust performance even in challenging conditions.
RINEX raw data logs are compatible with OPUS, CSRS-PPP, AUSPOS and other PPP services so users can now get centimeter-precise results any place on Earth.
Built-in 3.5G modem and UHF LoRa radio. The Reach RS2 features a power-efficient 3.5G HSPA modem with 2G fallback and global coverage. The corrections can be accessed or broadcast over NTRIP independently, without relying on internet connection on a smartphone.
For remote areas, the Reach RS2 has a built-in LoRa radio that has proven to be a reliable link for RTK corrections for distances up to 8 kilometers.
Designed for Tough Conditions. The Reach RS2 is engineered to be waterproof and impact-resistant. Its body is manufactured in a two-step injection process and is made out of shockproof polycarbonate covered in a special elastomer for extra protection. The receiver has an industry-standard 5/8-inch mounting thread.
The LiFePO4 battery of the Reach RS2 is designed for 16 hours of work as a 3.5-G RTK rover on one charge regardless of weather conditions. It can charge from a USB wall charger or a power bank over USB-C.
A RS232 interface allows users to connect the Reach RS2 directly to external hardware and output position in NMEA.
Photo: Emlid
ReachView App. The Reach RS2 comes with a mobile app, ReachView for iOS and Android, that is used to control all the features of the device. Users can create projects, collect and stake-out points, and import and export geodata in industry-standard formats such as CSV, DXF and Esri Shapefile.
The Reach RS2 comes in a carrying bag with a USB-C cable and a LoRa radio antenna. The ReachView app is available for download from Play Market or App Store.
Shipping of the first batch starts in mid-June 2019.
Allystar Technology Co. Ltd. has launched its smallest multi-band multi-GNSS module, the TAU-0707. Within its 7.6 x 7.6 millimeter size, the TAU-0707 series module supports major GNSS constellations (GPS / Galileo / GLONASS / BeiDou / QZSS / IRNSS) and all civil bands (L1, L2, L5, L6).
As the latest addition to Allystar’s GNSS portfolio, the TAU-0707 series module is a concurrent multi-band multi-GNSS receiver embedded with a cynosure III single-die standalone positioning chipset, which offers multi-frequency measurements to improve positioning accuracy and simplifies integration for third-party applications, said Shi Xian Yang, Allystar marketing manager.
Moreover, Allystar also provides the built-in low-noise amplifier in the TAU-1010 series module, which offers the module with improved RF sensitivity and exceptional acquisition and tracking performance even in weak signal areas.
With more and more satellites supporting L1/L5 signals, Allystar offers two modules to fully support all civil signals on the L5 band for the standalone market. The TAU1206-0707 and TAU1205-1010 are expected to be better in multipath mitigation mainly due to the higher chipping rate of L5 signals relative to L1 C/A code.
L1/L5 band module for standalone market.
For professional applications, module TAU1303-0707 comes with built-in support for standard RTCM protocol (MSM), supporting multi-band multi-system high-precision raw data output, including pseudorange, phase range, Doppler, SNR for any kind of third-party integration and application.
Module with Raw data output for professional market.
Allystar TAU series module offers superior accuracy thanks to the onboard 26-MHz temperature compensated crystal oscillator and a reduced time to first fix relying on its dedicated 32-KHz real-time clock oscillator. Based on 40-nm manufacturing processes of the Cynosure III GNSS chipset, it comes with very low power consumption at less than 40 mA.
According to the company, engineering samples and a reference design of the Allystar TAU-0707 and TAU-1010 series module will be available in April.
On April 6, the GPS system used by many organizations for critical infrastructure will perform a rollover. The rollover is the result of a legacy GPS navigation message which gives a week number as a 10-bit parameter.
As a result, the week number parameter in the GPS navigation message needs to reset to zero every 1024 weeks. That means from that date onwards, users are likely to start seeing rollover problems in GPS receivers that aren’t programmed to cope with the week number reset.
Meinberg, a GNSS receiver maker based in Germany, has a different approach with its GPS receivers. Instead of a 10-bit parameter, Meinberg’s firmware uses a 16-bit week number, and it is incremented at the end of each week.
This means that by the first rollover on Aug. 21, 1999, the week number sent by the satellites rolled from 1023 back to 0, while the internal (Meinberg) week number simply counted to 1024, then to 1025 and so forth. So, on April 6, the GPS week counter will reset to 0, but Meinberg’s internal one, which will have been reached the value of 2047 by that time, will continue to count in a consecutive order.
More information about the GPS Week Number Rollover can be found on our Meinberg’s Knowledge Base.
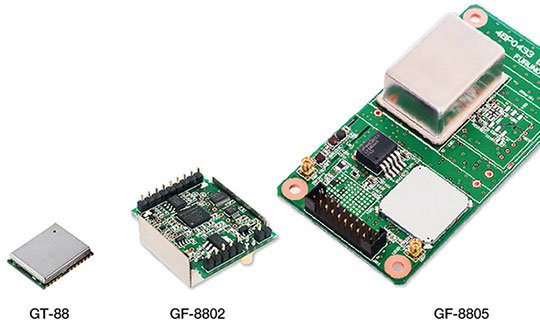
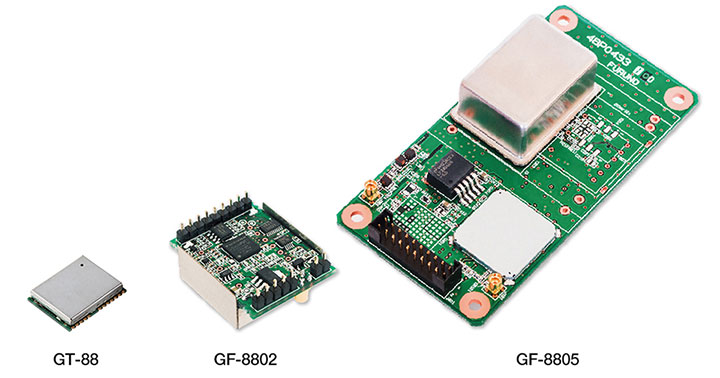
Furuno Electric Co. Ltd., based in Nishinomiya, Japan, has developed the GT-88 timing module and GF-8801/02/03/04/05 disciplined oscillator for users who require UTC time-synchronized signals to meet the new 5G requirements.
They provide UTC time-synchronized timing signals (1 PPS/10 MHz) by receiving GNSS satellite signals. Achieved stability is better than that of an atomic clock, including a rubidium.
Photo: Furuno
The GT/GF-88 series includes a brand-new algorithm, named Dynamic Satellite Selection, that provides outstanding multipath mitigation, especially in urban canyon environments, the company said. The algorithm was developed by Nippon Telegraph and Telephone Corporation (NTT) based in Tokyo, Japan.
Extremely high stability of 4.5 ns (1 sigma) is obtained, only requiring reception of the L1 band (1575.42 MHz) frequency GNSS satellites. It was achieved by improving advanced position estimation algorithms and optimizing position calculation among several different GNSS satellite constellations. It allows users to achieve 5G-required performance without any changes to existing single-band GNSS antennas.
It incorporates the Dynamic Satellite Selection, an advanced multipath mitigation algorithm developed by NTT. Normally typical time synchronization performance deteriorates in urban canyon environments by the effect of multipath. The Dynamic Satellite Selection reduces this time error by one-fifth. This provides more flexibility when installing GNSS antennas. Consequently, the GT/GF-88 series now permits GNSS antennas to be mounted on walls, windows of tall buildings and other difficult reception environments.
The GT/GF-88 series continues to support GPS, GLONASS and QZSS satellite constellations, and now adds Galileo support. As the total number of satellites available increases, operational stability also increases.
A year-long project aboard a commercial cargo ship collected tens of thousands of snapshots of radio-frequency interference in the GNSS band on a passage from Spain to Korea and back. Most interference was detected in busy port areas, less interference while transiting along coasts, and while least frequent, interference was still found in the open ocean.
Researchers at the German Aerospace Center (DLR) are still analyzing the vast amount of GNSS disruption data collected during the year-long project. Two papers have already been published about this project, and more are on the way, according to principle researcher Emilio Pérez Marcos.
In a paper presented at the Institute of Navigation last year, Marcos and his co-authors outlined the results of the last five months of this unique sampling experiment. Detection equipment was mounted on a large Hapag-Lloyd container ship. The antenna was mounted about 50 meters above the water line and provided a line-of-sight of 25km or more. The L1/E1 and L5/E5a frequency bands were continuously monitored. In addition to a “Snapshot” recording device used to save raw data samples (time snapshots), a more resilient DLR multi-antenna receiver was used to assess the impact of interferences in beamforming array GNSS receivers (semi-resilient).
As might be expected, the most interference was detected in busy port areas. Less interference was experienced while transiting along coasts. While it was the least frequent, interference was still detected during open ocean transits.
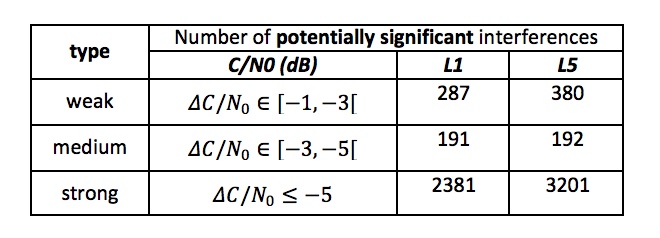
Table: Emilio Pérez Marcos and co-authors
Of the 39,045 snapshots recorded, 6,632 contained radio frequency interference at 1dB or higher. Separate tests have shown that many single antenna GNSS receivers begin to perform poorly with interference signals greater than 1dB. The other 32,413 snapshots could represent interference signals that may have come from weaker transmitters, sources more distant from the ship, been the result of adjacent band transmissions, or other phenomena.
Three particularly strong and persistent interference incidents were noted in the paper.
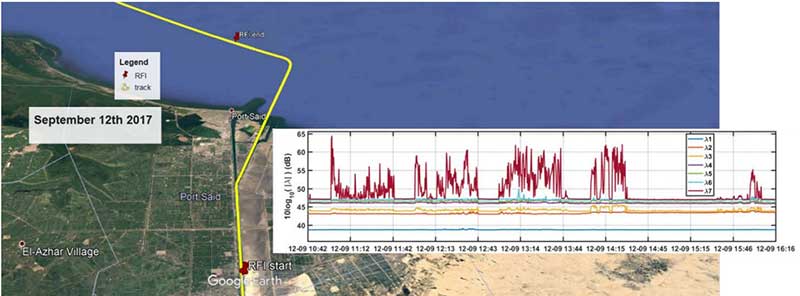
The first was detected when the vessel was transiting the Suez Canal northbound. The interference lasted around five hours and 60km. At several points the interference prevented the DLR semi-resilient GNSS receiver from working properly, which would mean that any single antenna GNSS receiver would cease to function completely.
Vessel going north in Suez Canal. RFI detectable during approx. 60 km. Inset: Eigenvalues during the 5 hours that the RFI was detectable. (Graphic: Emilio Pérez Marcos)
The second caused the DLR receiver to fail when the vessel was entering Jebel Ali, the port of Dubai in the United Arab Emirates. The DLR receiver provided some resilience thanks to its beamforming capabilities; again any other receiver would have suffered the interference effects earlier being unable to provide any PVT. The receiver did not return to proper operation for 11 days and 5,000km. The reason for this is uncertain and under investigation.
Particularly strong interference (45dB) caused the third incident and resulted in the DLR receiver failing for three days. It began when the ship was entered the highly trafficked Malacca Straits.
The equipment used also allowed researchers to determine direction of arrival for the interfering signals and to evaluate whether the interference was a spoofing signal.
For the reported strong interference events, DLR consulted the captain of the ship, who attested and confirmed the loss of PVT in the ship’s own GNSS receiver, with all the consequences that this implies for the systems that rely on it.
The paper, “Interference and Spoofing Detection for GNSS Maritime Applications,” was presented at the ION GNSS+ conference in Miami in September of 2018. It described the last phase of a yearlong measurement effort aboard the ship by DLR. An earlier phase of the campaign has also been published in E. P. Marcos et al., “Interference awareness and characterization for GNSS maritime applications,” 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, 2018.
The authors are preparing additional papers to describe more of the results from the larger project.