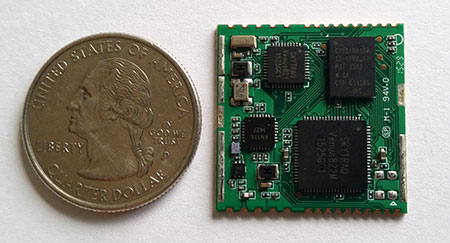
SkyTraq’s S2525F8-BD-RTK multi-constellation RTK receiver is designed for UAV and mobile platforms.
SkyTraq Technology, a fabless GNSS positioning technology company, is introducing the S2525F8-BD-RTK, a cost-effective, low-power single-frequency RTK receiver for unmanned aerial systems and mobile platforms requiring centimeter-level position accuracy.
The S2525F8-BD-RTK multi-constellation RTK receiver supports GPS, BDS, QZSS, and SBAS, simultaneously tracking up to 28 satellites. With its 25 x 25 millimeter form factor, 300-mW power consumption and 3 gram weight, it is designed for any outdoor applications requiring high-precision RTK positioning.
S2525F8-BD-RTK supports both base station and rover modes. As a rover, it receives RTCM 3.0 or 3.1 data from a base station, or raw measurements from another S2525F8-BD-RTK receiver serving as base station, and performs carrier phase RTK processing to achieve relative positioning with 1 cm + 1 ppm position accuracy within 10-Km baseline.
Its compact evaluation board has serial interface connector supporting direct connection to Ardupilot and Pixhawk autopilots for UAS testing. A Bluetooth 2.1 module is included on-board to simplify outdoor evaluation using Bluetooth-connected smartphone or tablet to receive remote base station data via NTRIP client software over the Internet.
S2525F8-BD-RTK engineering sample, datasheet, reference design and evaluation kit will be available in October. Volume production delivery to customer begins in November 2015.
Unicore has released the UB380 GPS/GLONASSS/BDS high-precision board at ION GNSS+ 2015, held this week in Tampa, Fla.
UB380 is a multi-GNSS receiver that supports GPS, GLONASS and BDS. It is based on Unicore’s mature multi-GNSS system on chip (SoC). UB380 is designed for high-precision positioning, navigation and GBAS applications.
UB380 can track GPS L1, L2, L5; GLONASS L1, L2; and BDS B1,B2, B3 (support) — the support of GPS L2P, L2C can satisfy the high-precision requirements of GBAS reference station equipment.
With the latest tri-frequency RTK engine, UB380 can process tri-frequency of BDS and GPS, and the dual-frequency of GLONASS observation data, which can significantly reduce initialization time, improve position accuracy, and enhance reliability in difficult environments such as in urban canyons and under tree canopy, as well as make long baseline RTK possible.
The UR380 GNSS receiver with UB380 inside.
UB380 is compatible with industry-standard GNSS boards in size, interfaces and electrical standards.
Features of UB380:
384 channels, support for BDS B1/B2/B3 + GPS L1/L2/L5 + GLONASS L1/L2
Trimble debuted its new R2 GNSS receiver at Intergeo 2015, held this week in Stuttgart, Germany.
The R2 GNSS receiver is a receiver that works with Trimble handheld devices and iOS, Android or Window mobile handhelds, smartphones and tablets using Bluetooth or USB connectivity. When paired with a mobile device, the receiver adds professional-grade GNSS capabilities for better accuracy. The rugged Trimble R2 provides GIS and survey professionals the flexibility to choose the mobile device, workflows and accuracy they need based on applications.
Trimble R2 GNSS Receiver for Mobile Devices
The Trimble R2 GNSS receiver is compact and portable, weighing 2.4 pounds. With one-button operation and a field swappable battery, the receiver can be pole or vehicle mounted or carried on a backpack. The R2 is a multi-constellation receiver that supports GPS, GLONASS, Galileo, BeiDou and QZSS satellite signals, as well as SBAS.
With a variety of standard and optional correction capabilities, the Trimble R2 can achieve sub-meter to centimeter positioning for a broad range of accuracy requirements. The receiver is an option for the Bring Your Own Device (BYOD) strategy.
“Today’s geospatial professionals require flexible solutions which allow for configuration to meet their specific job requirements,” said Ron Bisio, general manager of Trimble’s Surveying and Geospatial Division. “The Trimble R2’s versatility to support GIS and survey workflows as well as BYOD deployment enables geospatial professionals to collect data using the mobile device, workflow and accuracy they choose.”
Workflows – GIS and Survey Field Software
Designed for both GIS field data collection and survey workflows, the Trimble R2 receiver integrates with Trimble TerraFlex mapping and GIS field software and Trimble Access survey field software.
TerraFlex software is a scalable cloud-based solution for geospatial data collection. By pairing the R2 with a smart device or Trimble handheld running TerraFlex, the solution addresses a wide variety of field requirements, including attribute-rich GIS data collection on consumer and professional devices.
Trimble Access software supports the workflows of everyday surveying tasks such as topographic and control surveys and specialized surveying tasks such as roads, monitoring, tunnels and mines. By pairing the receiver with a Trimble handheld running Trimble Access or TerraFlex field software, the Trimble R2 is a versatile solution that supports the full range of geospatial data collection workflows for both GIS and survey applications.
Flexible Accuracy
The receiver is capable of receiving a broad range of corrections from traditional RTK, VRS networks and SBAS to Trimble RTX correction services via cellular/IP connections or satellite (L-band), the Trimble R2 provides high-accuracy data worldwide.
The R2 GNSS receiver can leverage the entire portfolio of subscription-based Trimble RTX correction services to accommodate a wide range of applications and accuracy requirements. This includes CenterPoint RTX (less than 4 centimeters), RangePoint RTX (less than 50 centimeters), and ViewPoint RTX (less than 1 meter) correction services.
How the Internet of Things Now Drives Location Technology
The number of devices connecting to the Internet is growing fast. The applications running on them require location context to determine the most likely use case. These devices need continuous location — not necessarily noticed or activated by the user, but always on. The specification that becomes important is energy per day: the device must maintain its location without draining its battery — and increase location availability indoors. That creates new design requirements for hybrid capability.
By Greg Turetzky
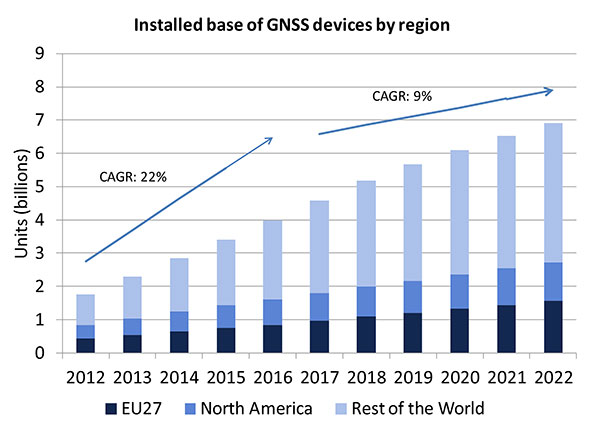
A lot of people have the opinion that the GNSS market is kind of flat. Actually, several different market studies would indicate that it’s not as flat as you would think. See FIGURE 2, taken from the European GNSS Agency’s (GSA’s) 2015 GNSS Market Report. The growth rate certainly is slowing, but any market that continues to grow at a 9 percent annual growth rate is a very nice target area. As you can see, the GSA expects that we’re going to have somewhere in the neighborhood of 7 billion devices within the next eight to ten years.
Figure 2. Installed base of GNSS devices by region; the GNSS market continues to grow at a rapid pace. Source: GSA GNSS Market Report.
We’re getting to the point where the number of GNSS receivers exceeds the population of the planet, which makes for an interesting thought process as to where GNSS is going to end up, and how it’s going to have to end up in everything that we do. That makes for a nice market opportunity. A big reason for that is we’ve seen a lot of growth in demand for multi-constellation GNSS. Everything pretty much has GPS in it that everyone terms as GNSS, but the growth of these other constellations is happening relatively quickly.
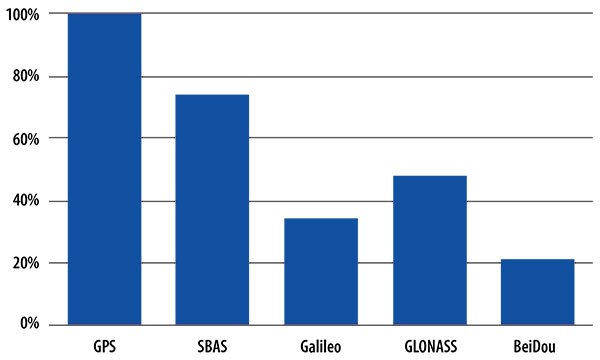
FIGURE 3, in my opinion, is already significantly out of date, even though it is less than a year old. Other market estimates indicate that GLONASS penetration into receivers, especially in the mobile phone field, is closer to 70 or 80 percent today, and that is expected to grow. There’s really no technical or economic reason why GNSS receivers can’t support multiple constellations, even at the consumer mobile device level.
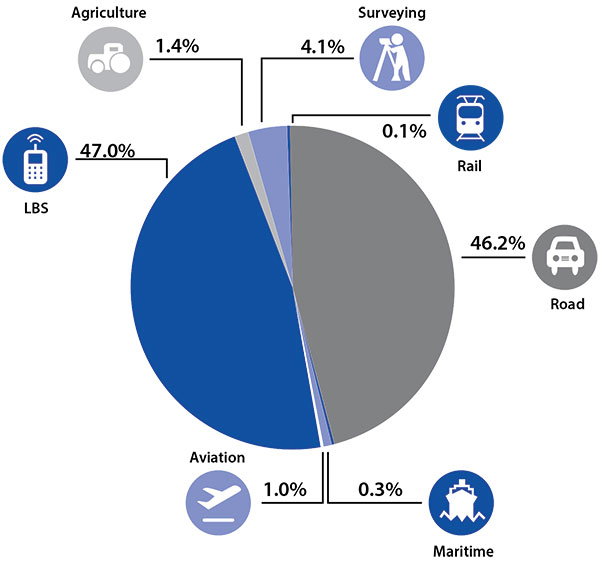
Once all those constellations are in place, let’s look at where those receivers are going from a market standpoint. FIGURE 4 is divided by revenue, which is an interesting way to do it because we all know if you divided it by actual units, then the location-based services (LBS) portions in phones would dominate everything; everything else would just be a sliver that wouldn’t be visible. But if you look at it from a revenue standpoint, there are still many revenue opportunities in the phone segment and in the automotive segment.
Another reason to expect continued market growth is, if you examine Figure 4, you’ll notice that the Internet of Things (IoT) category (see SIDEBAR) doesn’t even show up here. We’ll see going forward that there will be a new slice of pie showing a focus on that segment and those types of applications.
Intel and the Internet of Things
Intel’s mission is no longer only to build PCs. We’re about bringing smart, connected devices to everyone. That encompasses a range of products, and we’ve been expanding our portfolio appropriately.
We start with everything from big iron data centers (which are part of smart devices) to mobile clients and all the way down to the Internet of Things (IoT) and wearable devices. All those devices are part of this smart connected world. Our group’s job is to help on the connectivity side, which varies by product.
This whole idea expands beyond mobile phones and into the IoT, a big trend whose methodology is transforming business, starting at sensors all the way up to big data, to make interesting decisions. The number of devices that are being able to connect to the Internet is growing faster than anybody can keep up with, and that creates a really interesting opportunity. That gives you a bit of a picture as to why Intel is interested in this market and where you’re going to see us playing.
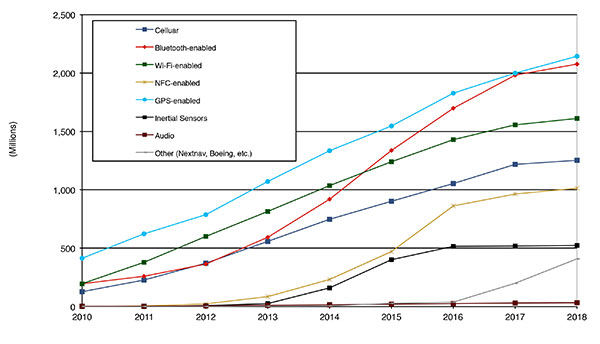
Looking at how we provide this location capability beyond just GNSS, how are people determining their location in these different platforms, and what are the different technologies available? FIGURE 5 shows that in 2014–2015 the most popular technology is still GPS, but there is a fast-growing trend in both Bluetooth-enabled and Wi-Fi-enabled penetration of location technology. Both of these are more suited to indoor operation, where the market is still in its early stages.
Figure 5. Alternative location technology shipments, world market forecast: 2010–2018. Source: ABI Location Technologies Market Data.
Although GNSS continues to grow with market growth, the growth of other technologies and the ability to incorporate them into location solutions is growing pretty quickly, and the radio versions of those are, in general, growing the fastest, followed by the inertial sensors. I think we’re going to see this combination of location technologies, jointly providing a single answer, becoming the norm in mobile products.
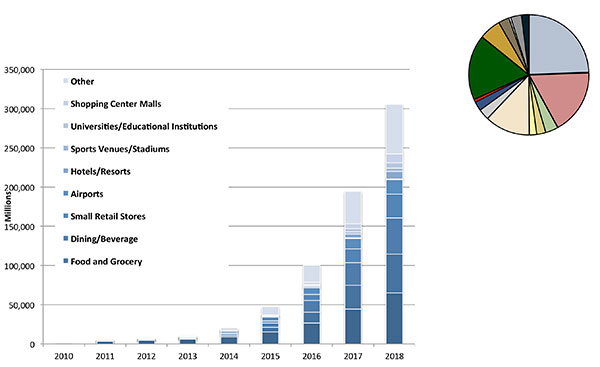
These technologies are going to end up, especially for indoors, in different areas. FIGURE 6 shows a huge growth, not only growth but segmentation among a bunch of different types of venues, all of which seem to be adopting an indoor location methodology. Not all of them will adopt the same one, but all these types of venues are looking at that market and are looking at potential different technologies to serve their needs. What might be most appropriate in a grocery store — geared towards finding a particular item — like a Bluetooth beacon might be less interesting in an airport, where there’s still a need for navigation from place to place, where proximity is not necessarily the right answer.
Figure 6. Indoor location technology installations by vertical market, world market forecast, 2010–2018. Source: ABI.
We see a large growth of a very disparate technology base; at the right of the figure is a pie chart where I had to remove all the callouts, the list of all the different technology suppliers addressing these particular indoor markets. What you see is a highly fragmented supplier base; that’s very consistent with an early market implementation. There’s a lot of different people attempting to get into this market with a lot of different solutions. This is pretty classic for an early-adopter scenario.
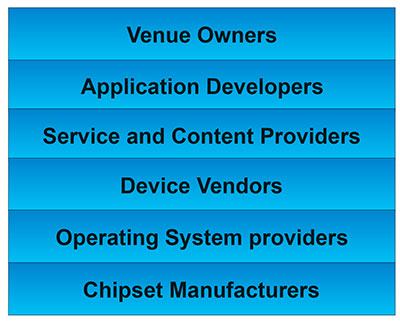
The Stack. Changing accuracy requirements will come up a bit later in this article. Once we’ve looked at where those different venues are from a requirements standpoint, we start to look at the types of companies that are trying to participate in the ecosystem required to do that (FIGURE 7). If you start from the bottom, where I live as a chipset manufacturer, and you move up the chain, you see seven different layers of people in the creation of a location to the end user, especially indoors. And every single person you see in this value chain is trying to make money.
Figure 7. LBS value chain: a highly complex ecosystem with each segment looking to differentiate and monetize indoor location. Source: GSA GNSS Market Report.
That’s the crux of the issue: a lot of people want a piece of that pie, and all of them have a relevant part to play, but when seven people in the stack are all trying to own the location result in order to monetize it, it becomes difficult to create a unified methodology. I live at the bottom of this complex ecosystem, in the technology implementation layer. Getting dollars to flow from the top to the bottom gets relatively difficult, so we are very driven to bring cost competitiveness into this market.
In summary, from a market standpoint, we see that the market opportunity is very big and still growing. This makes it interesting to a company like Intel, even though we aren’t a major player in the business today, to continue to invest in it. We see a trend going from GPS to GNSS and on to location, and now the big opportunity is indoor location. But this indoor-location market is not a stand-alone device opportunity. Indoor location requires this kind of technology inside other devices, inside phones and tablets and IoT types of things.
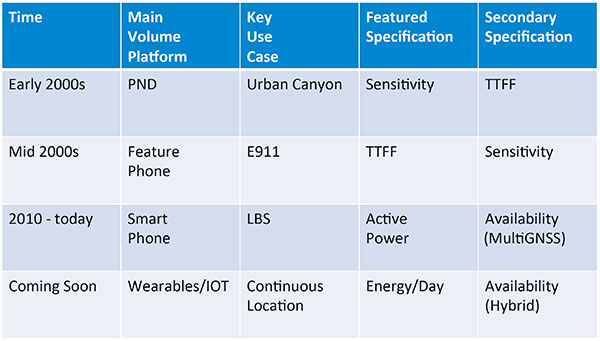
Context. Let’s look at indoor location as a feature in a larger portion of product. That idea comes from the requirement for location not just for the location itself, but in order to provide context. That’s critical because now these smart, mobile devices are not just used to make phone calls, but are used all the time. As a result, many applications running on them really require that location context to determine the most likely use case that the device is currently operating, making the consumer experience easier and more natural. This is evident throughout the entire value chain from phones and tablets to wearables. If you think about that from a requirement standpoint, you see the major places where GNSS has enabled trend changes in the market.
Let’s step back a bit in history to go through FIGURE 1, the opening figure, horizontally. In the early 2000s when I was at SiRF Technology, the main market drivers were personal navigation devices (PNDs). There were all these dashboard-mounted PNDs, and the main things we were trying to fix was the urban-canyon problem. GPS always worked well in the rural areas but always had trouble in urban canyons; to fix that, we had to improve the sensitivity. The solution in that timeframe was with multi-correlator designs and improved RF frontends; we were able to improve the sensitivity of the receivers by a good 5–10 dB, which enabled us to really keep the antennas inside the car so that there was no need for roof-mounted antennas. The PND could be mounted on the dash and work just fine. That was a big factor in improving the user experience. The secondary specification that enabled that market to grow quickly was time-to-first-fix; those devices had to power-up and work fast to prevent user frustration.
Within about five years, however, the PND market was overtaken by growth in the feature phone market. The reason for that was the FCC E911 mandate; everyone had to figure out a way to make sure that phones sold in the United States had the ability to meet that 911 mandate. GPS was one of the major methodologies in meeting that, and the main driver there was not around sensitivity, it was improving first-fix times. The mandate required a 30-second TTFF implementation in a very challenged environment to support emergency-services dispatch. This led us to the development of assisted GPS (AGPS) and further integration into phones. We had a secondary requirement of continuing to improve the sensitivity, because now we had to deal with an even worse antenna in a handset.
Once that was taken care of in the mid 2000s, the next thing we saw coming — and what’s coming now — is the change in GPS requirements for smartphone navigation. This comes from the huge growth of higher end smartphones that are running multiple applications driving the use-cases around LBS. How will the location be used to provide services, now that we can provide applications on that platform? Now the most important specification has become active power? Every time a GPS receiver is turned on for use in an LBS mode, you have to make sure that the power consumption is kept to a minimum, or no one will use those services. So the active power of the device became a very important specification that we were all trying to improve.
The secondary specification we had to improve was the availability. This is where the advantage of multi-GNSS started to show up — using handsets for car navigation on Google map types of implementations. So the performance of smartphone navigation in the urban canyon became a big driver recently as the main use case.
Impacts of New Requirements on Silicon Design
Standby power reduction impacts
SRAM is the leakiest component of typical design
Needs to be reduced or ideally eliminated
Non-continuous fix methods
Ability to quickly save and restore state information
Hybrid location solutions
Support measurements from multiple radios
Need to share radios, not duplicate chains
Increased integration of of multiple radios on single die
Need more interference rejection capability
Ability to support concurrent radio operation on single die
Next! What’s coming next is the idea that these wearables and IoT platforms are not just doing LBS on demand because of the currently active application. They are going to need continuous location. The device needs to provide location capability all the time, but it’s not necessarily going to be noticed by the user or activated by the user, so the specification that becomes important is energy per day. You want to make sure your device can maintain its location without draining its battery. Then we are also going to have to increase the availability of location into indoors to really fix this whole problem. And that will really move us into hybrid capability.
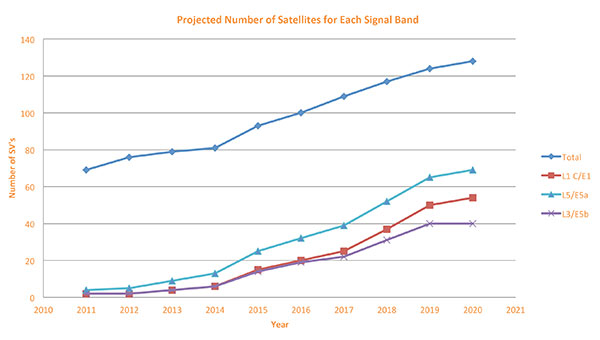
If we look at those changes in the market and we look at how they’re going to impact the GNSS architecture, the first thing we want to look at is: Where is GNSS? FIGURE 8 is a plot that I’m sure everybody has and is hard to keep up to date. It looks at the satellites coming from the different satellite constellations. The important thing here is that we are approaching a timeframe where a significant uptick in the growth of satellites can send the numbers over 100. That can really have an impact on receiver design, if you’re building a multi-GNSS receiver and you have to deal with a hundred satellites. How are you going to do that?
Figure 8. Projected number of satellites for each signal band.
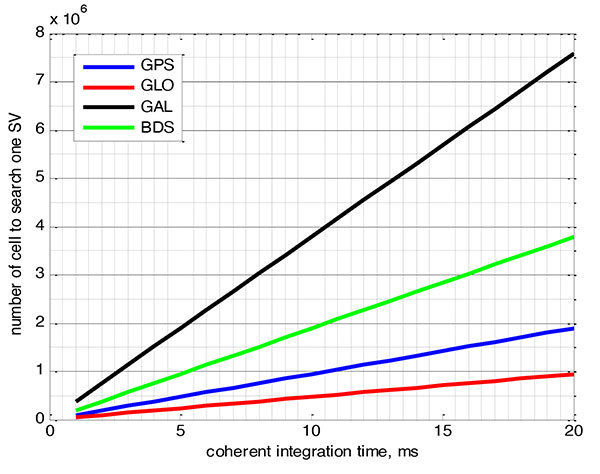
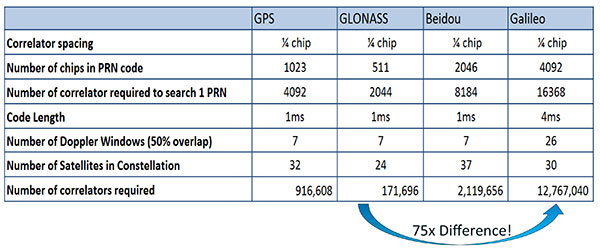
FIGURE 9 shows the relationship between the coherent period and the number of correlators required to search for one satellite in each constellation. We looked at particular scenarios — in this case, let’s say we are trying to do an outdoor location, so –130 dBm cold start test (FIGURE 10) with an initial frequency certainty of around 1 part per million (ppm). We wanted to look at the impact of the different constellations on doing that, and what it takes inside of the receiver to implement it. I’m not going to go into great detail here. But looking at those impacts in correlator counts, you can see the difference between building a GPS receiver that can do this and building a Galileo receiver that can do this. From the simplest one, that is, GLONASS, and from the most difficult one, which is Galileo, you see a 75x difference in the number of correlators required to do that, based on signal structure. This would indicate that, maybe from a cold start fix point of view, you might prefer a GLONASS implementation, and do GPS or Galileo later.
Figure 9. Relationship between the coherent period and number of correlators requried to search for one satellite in each constellation. ±1 ppm local oscillator frequency uncertainty; ±10 kHz Doppler shift range; 50 percent Doppler bin overlap; 1/4-chip correlator spacing.Figure 10. Test scenarios, cold start test.
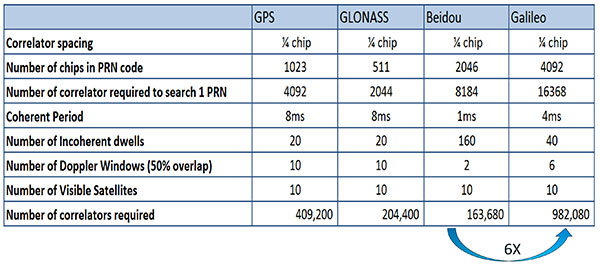
If that specification was your primary concern, then you would look at how those requirements got implemented into those devices. In addition, you try to come down to these low levels of power consumption, maintain sufficient accuracy to support these applications, and be able to move this into a very small form factor. If we look at the relationship between the number of correlators required to search for each satellite and amount of silicon area that requires, we see a big difference in the growth of those, depending on which constellation you look at. But if you look at a hot start scenario (FIGURE 11) rather than a cold start and at a weaker signal level, which is the more common implementation in devices today, you see a different result. With an improved starting condition because we have better information on the oscillators and reduced other uncertainties producing a smaller search space, the silicon area impact is greatly reduced. Then we have to really look at reducing standby power. That means we need to look at static random-access memory (SRAM) because SRAMs are a horribly leaky component and create very large standby power, but they are what we’ve been using for years in the standalone GPS world.
Figure 11. Test scenarios, hot start test.
We also have to look at non-continuous fix methodologies: this idea of turning things on and off to save power, which relates back to the standby power issues. We also have to look at hybrids: How are we going to support measurements from multiple radios like Wi-Fi and Bluetooth that are becoming important for indoor location? How are we going to share those radios without just pasting them together? That involves integration onto single die, and looking at what happens on the silicon level, and at what happens when you try to run radios at the same time.
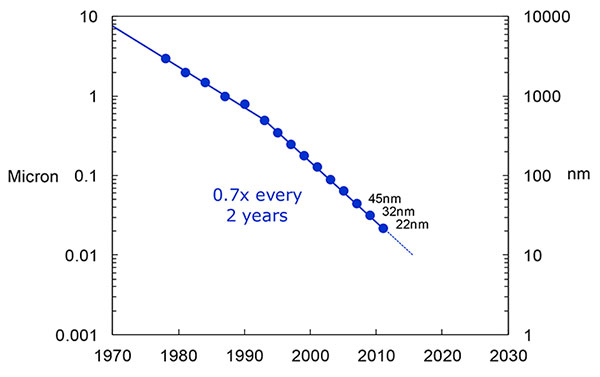
What we have to work with, especially here at Intel, the home of Gordon Moore, is Moore’s Law. It is still working 30 years after it was proposed. Recently, we see that we are tracking this progression of constantly reducing device sizes and moving forward. The dates in FIGURE 12 are for the process technology nodes associated with a classical digital process. We are not at the 22-nanometer level today on GPS receivers, but we are moving down that curve.
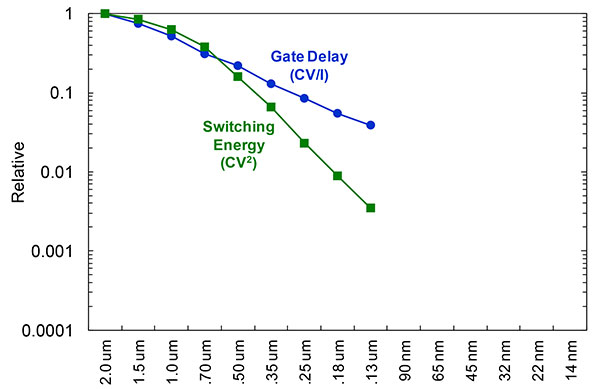
Figure 12. Moore’s Law in action: transistor scaling and improved performance. In GNSS terms, this means more gates and more memory for less cost, improved TTTF and sensitivity by allowing more search capability.Figure 13. Scaling also increases speed and reduces power. HIgher clock speed provides better search and more complex navigation algorithms.
Obviously, when you move down that curve, you greatly increase your ability to add more gates to improve TTFF and sensitivity. More correlators help you search out more uncertainty faster. The other thing this does is allow us to run faster, to up the central processor unit (CPU) clockspeed. This allows more software capability to do things like process more advanced navigation algorithms, bring in more satellites from multiple GNSS, run very expansive Kalman filters, and look at hybrid technologies. It has also driven down the power, so that reducing the active power requirement that we had was kind of coming along with Moore’s law without a whole lot of effort.
But now we’ve run into a problem: the parameter that we care more about, standby power, is actually going up. Although we are getting benefits out of Moore’s Law from speed and active power, we are actually having a problem. It’s increasing our standby power, which makes it difficult to go to these lower fix rates with faster restarts.
You see a trend here. As you move down in technology nodes, you find that the more advanced technology nodes are less applicable to the smaller multi-purpose devices. This is part of the reason why you don’t see the mobile phone devices coming down as fast as you see the desktop devices coming towards those new technology nodes.
This means some really significant silicon design challenges. We need to figure out how to take the advantages of Moore’s Law and maintain the benefits of smaller geometry, we need higher clock-speeds, and we need more memory for multi-constellation methodology and that gets lower active power and smaller size.
But we have to figure out a way to not give up our standby power when we start moving down into these very small geometries. That will require some new methodologies, both at the chip level in terms of how we build silicon, and at the system design level, in terms of how we put these things together inside a mobile phone.
What Intel Is Doing
I can’t tell you what we haven’t done yet, but we look at location as an opportunity where the strength of Intel comes into play. We have very advanced silicon processors and we are bringing those to bear on the location technology problem — just starting in the last few years. Our goal is to provide a GNSS and location silicon solution with best-in-class performance based on Intel technology. Once we’ve done that at the silicon level, we’ll look at bringing the platform-level integration capability together.
We have the ability to merge multiple location technologies. We have a platform-level capability to integrate hardware and software to solve the indoor location problem on a variety of platforms. To execute to Intel’s vision, we’re going to push this into a ubiquitous technology present in all these devices, so that we can improve the variants on these mobile products.
Multiple Radios. That’s part of what’s driving the whole industry towards the kind of consolidation that we’ve seen: stand-alone chipsets are not the only (or even the preferred) way to solve this problem. Without some access to the system design level, we’re not able to solve this problem for mobile phones and IoT type devices. We’re going to see this trend — that we all see coming — of putting multiple radios onto a single die, because that does reduce cost and size as we try to get into watches.
The 2015 Consumer Electronics Show brought out the new stuff. They’re talking about IoT buttons. We still have a ways to go; bringing that capability down to that size in a GNSS radio is a difficult problem. Once we start incorporating these different radios, such as Wi-Fi and Bluetooth, into this solution, we run back into the problem of the value chain: How to get everyone aligned in a device with these capabilities into a single unified solution?
One of the problems a lot of us see with these mobile products is that they have a lot of application and they require a lot of interaction. We’d all like these devices to become smarter and present the information that we want, when we want it. A big part of that is the location context, and so that’s what we’re planning on doing: integrating that location context into all these platforms so that these smart connected devices can be even smarter and provide a better user experience.
GREG TURETZKY is a principal engineer at Intel responsible for strategic business development in Intel’s Wireless Communication Group focusing on location. He has more than 25 years of experience in the GNSS industry at JHU-APL, Stanford Telecom, Trimble, SiRF and CSR. He is a member of GPS World’s Editorial Advisory Board.
The statements, views, and opinions presented in this article are those of the author and are not endorsed by, nor do they necessarily reflect, the opinions of the author’s present and/or former employers or any other organization with whom the author may be associated.
This article is based on a GPS World webinar, which sprang from a presentation at the Stanford PNT Symposium. Listener questions and Greg Turetzky’s answers during the webinar, which can be read here.
The author would like to acknowledge the contribution of Figures 9, 10 and 11 from the paper “Optimal search strategy in a multi-constellatoin environment” by Intel colleagues Anyaegbu et al, from ION GNSS+ 2015.
Telit’s Jupiter SE873 GNSS receiver with flash memory.
Telit has introduced the Jupiter SE873, a GNSS receiver in a 7 x 7 x 1.85 mm module with serial quad I/O flash memory, an integrated low noise amplifier, SAW filter, TXCO and real-time clock.
The new addition to Telit’s GNSS portfolio is a complete multi-constellation position, velocity and time engine that the company says delivers versatile performance in harsh environments.
The Jupiter SE873 supports Assisted GPS (both autonomous and server-based) plus Satellite Based Augmentation System (SBAS), which improve Time-To-First-Fix and position accuracy. AGPS data is stored in flash memory and is available even after all power has been removed and then restored. This is especially important for battery-operated equipment, Telit said.
The SE873 is a high-performance, high-sensitivity product that supports the entire GNSS spectrum: GPS, GLONASS and BeiDou, and it is Galileo ready. It delivers simultaneous low-power tracking of GPS and GLONASS or GPS and BeiDou. In the future, users will be able to add new functionalities.
“The SE873 outperforms all its competitors, most of which are ROM based. Employing flash memory results in a module that packs a lot of functionality into a small footprint,” said Felix Marchal, CPO of Telit.
Telit Jupiter SE873 is being presented to the market at Telit DevCon 2015 Sept. 8 and CTIA’s Super Mobility Week in Las Vegas Sept. 9. Telit DevCon is a one-day event that takes place the day before CTIA Super Mobility 2015 and is located close to the Sands Expo and Convention Center in Las Vegas. Visit Telit at booth #5032 during CTIA Super Mobility 2015.
High-precision receiver maker JAVAD GNSS is expected to make a major announcement at this year’s INTERGEO conference, which takes place Sept. 15-17 in Stuttgart, Germany. JAVAD GNSS will showcase its technology in Hall 6 at Booth: G6.049.
At INTERGEO 2014, JAVAD GNSS introduced its unmanned aerial vehicle, the TRIUMPH-F1. The TRIUMPH-F1 is based on the TRIUMPH-1, JAVAD GNSS’s field-tested high-precision geodetic GNSS receiver with 864 channels to track all current and future GNSS signals.
This year’s new product developments from JAVAD GNSS are not known at this point, but the company has announced on its website the BEAST RTK, with 5-Hz Base Station Transmission. The BEAST RTK provides surveyors with faster fixes under tree canopy and the ability to collect five times as many epochs in a time period. “In my ‘bad spot’ under a tree, I am making it through 10 resets in less than 10 seconds,” said one user, John Evers, PLS.
In the video below, Javad Ashjaee, president and CEO of JAVAD GNSS, and GPS World Editor-in-Chief Alan Cameron discuss the design of the TRIUMPH-F1 at INTERGEO 2014.
With more than 16,000 visitors from 92 countries, INTERGEO — held each year in a different city in Germany — is the world’s leading conference trade fair for geodesy, geoinformation and land management.
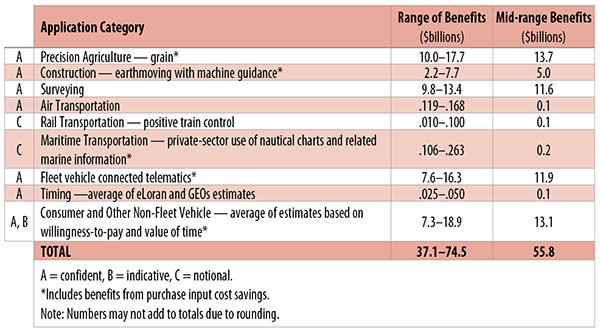
Table 1. Preliminary 2013 U.S. GPS economic benefit estimates. (Chart: GPS World, based on data from author)
This article is based on a presentation to the National Space-Based Positioning, Navigation and Timing Advisory Board in June 2015. The study reported on at the meeting was requested by the National Executive Committee for Space-Based Positioning, Navigation and Timing. It demonstrates the widespread use and importance of GPS to the U.S., with estimated benefits in 2013 of about $56 billion, or 0.3% of GDP for a subset of applications. The study is the first part of an effort that is expected to refine and extend this analysis.
By Irv Leveson
Critical to many civilian applications and innovations, GPS brings great economic benefits. These benefits have grown rapidly with the integration of GPS with other technologies and its wider and deeper infusion into applications. New GPS signals and other improvements in the system will further expand and enhance use. The unmistakable conclusion: GPS is everywhere.
Benefits of GPS to the U.S. will increase with the availability of other GNSS systems, even though GPS will constitute a smaller share of global GNSS benefits. The U.S. will continue to provide leadership, standards and innovation in technology and applications with positive domestic feedback.
GPS and other GNSS and enhancements raise productivity; reduce and avoid costs; save time; enable improved and new production processes, products and markets; increase health and well-being; reduce injury and loss of life; improve the environment; and increase security.
The National Executive Committee for Space-Based Positioning, Navigation and Timing (PNT), which is responsible for maintaining U.S. leadership in GNSS, commissioned a study to assign a quantitative value to the broad economic uses of GPS. The purpose is to inform the public, federal decision makers and critical infrastructure owners/operators on the importance of GPS and the need to protect it from disruption. Assessing the economic implications of actions such as preventing or disallowing interference, spectrum reallocation, developing supplementary or backup systems and/or toughening receivers can be informed by value estimates and the data used to derive them. In addition, economic values can contribute to planning for GPS modernization and analysis of budgets. Baseline estimates facilitate comparisons with future developments. GPS benefit estimates will be “ballpark” no matter how sophisticated the methodology because of limits to the availability of information, but in many cases, knowing orders of magnitude is essential in choosing courses of action.
Widespread, Pervasive Impact. The technological environment is one of rapid changes in information and materials technology and integration of technologies at levels ranging from systems on a chip to large-scale systems. GPS is increasingly integrated with other technologies and systems that build on each other to achieve greater outcomes.
The U.S. Department of Homeland Security counts GPS as an enabling technology because of its crucial role in 14 of the 16 industries that are classified as part of the nation’s critical infrastructure. It is useful to view GPS’ role as being especially important in “enabling the enablers,” industries that particularly support the rest of the economy and are at the forefront of economic growth. The most notable of these are transportation, communications, power and financial services.
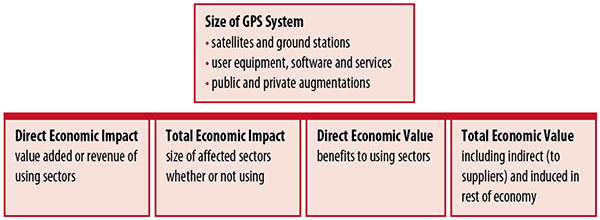
Economic Value versus Impact
Economic value is the addition to the value of the economy from the provision of a good or service, or the introduction of a technology. Benefits are measured relative to what would have been expected if there were no GPS. Direct economic value is the increase in value in using sectors. Total economic value includes increases in value to suppliers and value induced in the rest of the economy.
Direct economic impact, on the other hand, refers to measures of the importance of sectors that are using GPS. Total economic impact is the importance of sectors affected by GPS, whether they are using it or not. Total economic impact of GPS is virtually the size of the whole economy, so it is not very meaningful.
Direct economic impact is measured by value added of using sectors when the purpose is to avoid duplication among sectors that buy from and sell to each other. It may be measured by revenue for a single sector when adding sectors is not involved, so there is no need to avoid duplication.
The distinction between economic value and economic impact is critical. Even if economic impact is measured by value added rather than revenue, the value is not the net addition to the economy from the use of the product or technology. It is only the size of the using sector. See Figure 1.
Figure 1. Measuring GPS economic value and economic impact. (Chart: author)
The GSA Study
The most comprehensive estimates of global GNSS market size come from the European GNSS Agency (GSA), which has released four market reports from 2010 through 2015. The data are measures of economic impact and not economic value. The reports are of great interest because of their comprehensive global look at the sizes of markets and inclusion of forecasts. In contrast, the emphasis in this part of the present study is on current economic value, with U.S. benefits assessed for GPS.
One reason for interest in the GSA reports is that market information and projections often are proprietary and there can be great inconsistency across market research studies. GSA makes use of many confidential studies without revealing which sources contributed to each estimate. It apparently has been allowed to incorporate proprietary information from a number of market research firms since the data is subsumed in GSA’s own estimates and/or presented in graphs for which underlying numbers are not provided — and from which it is often difficult to even roughly extract them.
The 2015 report stated the methodology as: “The underlying forecasting model uses advanced forecasting techniques applied to a wide range of input data, assumptions and scenarios…Where possible, historical values are anchored to actual data.” Results were checked against opinions of market segment experts and market research reports. However, these analyses are not provided in the reports and have not been made available.
A distinction is made between the core market which covers the value of components that provide GNSS functionality in devices and enabled markets which “represent the services and devices enabled by GNSS.” The 2015 report provides global data on both core and enabled market and goes into much more detail on core markets for application sectors. In addition to providing sector information that did not appear previously, the 2015 report presents data on the extent to which each combination of the GNSS constellations was supported by receivers or chipsets offered by suppliers. Additional information on enabled sectors is in earlier reports.
GSA found in its 2015 market report that:
3.6 billion GNSS devices were in use globally in 2014, of which 3.08 billion were smartphones and .26 billion were for road.
North America had about 450 million devices installed (about 80% U.S.).
North America had 1.4 devices per capita in 2014.
North American shipments were 250–300 million in 2013.
Global core revenue was estimated at roughly €62 billion and enabled revenue at €227 billion in 2014. As noted, core revenue includes GNSS device components, software and services, while enabled revenue refers to applications.
Location-based services (LBS) was projected to account for 53.2% of 2013–2023 core revenue growth, and road for 38%.
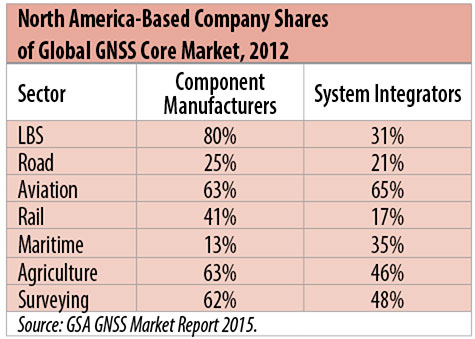
North American-based companies had sizeable shares of the global GNSS core market in 2012, particularly among component manufacturers. (See Table 2). Their market share among system integrators was highest in aviation.
North American-based companies had a 44% market share of value-added services revenue in 2012.
Table 2. North America-based company shares of Global GNSS core market, 2012. (Chart: author)
Markets and Applications
The pervasiveness of GPS-enabled applications is illustrated by the following statistics:
900 million mobile phones that incorporated GPS were sold globally in 2012.
The U.S. had 188 million smartphone subscribers and 263 million Internet users in 2013.
20% of U.S. mobile phone users get up-to-the-minute traffic or transit information.
The new industry category in the 2012 North American Industrial Classification System: “Internet publishing and broadcasting and web search portals” had U.S. revenue of $87 billion and 181,000 employees in 2012.
Google estimated that its search and advertising tools provided $111 billion in economic activity in the U.S. in 2013.
Deloitte estimated that Facebook enabled $104 billion of economic impact and 1.2 million jobs in North America in 2014.
Google Play and the Apple App Store each had more than 1.2 million apps in 2014.
How GPS Is Used. Uses of GPS include:
In agriculture for auto-steering tractors, combines and sprayers for precise operation, variable rate technology for precise placement of seed, fertilizer and pesticides, and for yield monitoring.
Managing forest health and ecological restoration, reducing fire and other hazards, and harvesting forest products.
In commercial fishing, navigation, finding fishing locations and monitoring fish catch by authorities.
In construction to direct the movement of dozers, excavators, pavers, scrapers, compactors and other heavy equipment and the placement of blades to give precise results.
In open-pit mining to guide loaders, dozers, drills and draglines.
In offshore energy exploration and development, for drilling, installations, pipe laying, diving operations, pipe inspection, repair and abandonment.
In surveying, to greatly reduce costs and to improve quality of products that rely on it.
In aviation, for navigation and monitoring positions of aircraft and for satellite-based augmentation systems (WAAS in the U.S.). GPS is the principal source for navigation for aircraft equipped with Area Navigation (RNAV) or Required Navigation Performance (RNP).
Railroad train pacing systems for cruise control, positive train control to keep track of train location and movement authorities, track defect location, and locating trucks with rail workers.
In marine transportation, for navigation, collision avoidance, communications and situational awareness and for monitoring by offshore authorities.
In vehicles, with handheld and embedded devices for navigation and fleet management.
For precise timing and time synchronization and frequency coordination (syntonization). It is used most notably in broadcasting and communications, including both cell phones and traditional telephone applications and the Internet, so packets arrive at the same time, for power generation and distribution to locate problems, and in financial services for time-stamping transactions.
In first responder services for location, navigation and communications and in emergency warnings and evacuations.
In structural monitoring of dams and bridges.
In environmental monitoring, including vegetation growth and sea-level change.
LBS and GIS
Rapid growth is taking place in location-based services (LBS) and geographic information services (GIS), which include everything from indoor location to many aspects of the Internet of Things and the “sharing economy,” and sophisticated systems for information management, analysis and display.
GPS is used for tracking and inventorying assets ranging from heavy machinery on farms and construction and mining sites, to pipes and other materials, containers in trucking sites and ports, and the location of utilities in the ground. In logistics it facilitates planning of product flow and transport.
The growth of same-day delivery — which takes advantage of Internet, cell phone, and location and navigation technologies enabled by GPS — is a continuation of the growth in just-in-time delivery that has been a phenomenon in manufacturing for several decades. Now it is having a profound effect on wholesale trade, retail trade and transportation.
The size of the LBS and GIS sectors is not defined and measured in a consistent way, and except for vehicle use, there is little information on productivity and saving in costs and time. (See sidebar box.)
LBS and GIS Market Size Estimates
For LBS and GIS, definitions and measures can vary greatly and often are not explicit.
Location-Based Services Market Size Estimates
Frost & Sullivan estimated the global LBS market at €22.8 billion in 2012 and forecast €32.0 billion in 2015.
Market and Markets estimated global LBS revenue at $8.1 billion in 2014.
Berg Insight estimated North American LBS revenue at $835 million in 2012.
(The U.S. can be assumed to spend 20–25% of the world value and about 80% of the North American value.)
Geographic information Systems Market Size Estimates
BCG estimated revenue of the U.S. GIS industry at $73 billion in 2011.
The global GIS market will reach $10.6 billion in 2015, according to a report of Global Industry Analysts in 2013.
The Canadian Geomatics study found private-sector spending of $2.3 billion in 2013. If U.S private spending was the same percentage of GDP, it would be $23.6 billion.
International Trade
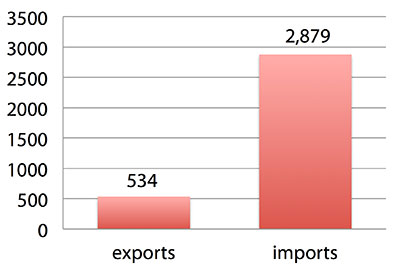
Official data show a $2.3 billion U.S. deficit in trade in GPS equipment in 2013. This gives an incomplete and misleading picture of the role of the U.S. and the benefits that result. See Figure 2.
Figure 2. U.S. trade in GPS equipment, 2013 (millions of dollars). (Chart: author)
The trade numbers for GPS equipment do not include revenue for licensing, international payments received by social media and e-commerce companies, or other Internet-based revenue for which the U.S. may have a substantial net trade surplus and which are an important source of revenue and profits of U.S.-based companies.
Imports of GPS equipment software and services enable the U.S. to gain more efficient production in many applications at home and enable the U.S. to export more goods and service that rely on GPS.
Exports of GPS equipment come back to the U.S. as components that benefit U.S. businesses and consumers with more capable products and lower prices. Exports of GPS equipment enable other countries to build on the technologies and contribute to innovation, while imports enable the U.S. to share in foreign innovations. Exports of GPS equipment and associated knowledge also raise incomes in other countries, creating larger markets for U.S. goods and services.
Scope of Benefit Estimates
The U.S. benefit estimates reported here are the result of an initial effort and are not meant to be comprehensive. More work is expected to be done to fill in some of the gaps.
Sectors were chosen based on availability of information to permit relatively robust estimates and importance to the economy or policy issues. These considerations limited the number of sectors for which estimates could be made. Methods were determined based on the nature of available studies and varied among sectors. Only economic benefits were included, with health and safety and environmental benefits left for later research.
Benefits include the value to users above their costs (consumer surplus). Benefits of GPS are compared with alternatives without GPS or an application using it (counterfactuals). Estimates are gross. They are not reduced by the costs of achieving the benefits. Contributions of augmentations are included, since a quantitative basis for separating them is not available.
Estimates were primarily benefits through productivity and cost savings in operations, with savings in input costs included where their magnitudes were clear. Benefits to the rest of the economy are not included. Illustrative allowances were made for the contributions of other technologies and systems to the outcomes examined.
In the case of GPS timing, the estimates were based on the costs avoided by not having to develop an alternative timing source on the assumption that the type of alternative source possible would have evolved from the time GPS became available. The measure does not represent the value of GPS time and synchronization to the nation and to users relative to the absence of a precise time and frequency source.
Government was included in the estimates for construction, surveying, and fleet and non-fleet vehicles. For timing and non-fleet vehicle benefits, two alternative measures are averaged. Sectors with lower quality estimates — rail and maritime transportation — were included because of their importance to the economy. Shares of benefits attributable to GPS were rough assumptions. More robust estimates would require extensive data collection and interviewing in studies greatly exceeding available time and resources.
The primary focus was on productivity improvements, cost savings and cost avoidance, where costs include users’ time. Productivity increases and cost reductions allow more to be produced with the same amount of resources in the sectors utilizing the technology or allow resources to be freed up for other purposes. In that sense, they are equivalent.
When benefits are measured by productivity gains or cost savings, much of consumer surplus (the value to users above what they pay) is implicitly included. Some sources measure value by willingness-to-pay. Willingness-to-pay includes consumer surplus. It also encompasses costs of the purchase and other costs incurred by the user.
Criteria for Selecting Sectors
The potential for making sector estimates of economic benefits was categorized in three basic levels:
confident: based on robust estimates.
indicative: based on one or more less robust estimates.
notional: illustrative, if major contributions of other technologies are not separated and estimates must be based on a plausible percentage of a larger benefit, or if information is not available and estimates must be based on a percentage of market size.
Choices among categories for estimation and estimation methods depended not only on which of the basic criteria are satisfied but also on the following additional criteria:
The importance of the sector to the economy, for example as an enabler of other activities.
The potential use of benefit estimates for the category as an input into analyses of the effects of signal disruption.
Several dozen studies were assessed to determine categories for inclusion and to select studies that can form the basis of estimation. Studies for use in estimation of benefits in a category were chosen according to how well they met the following criteria:
GPS. A test of introduction of GPS or comparison with and without GPS rather than benefits of a broader service.
Coverage. Estimates that cover a major part of the category.
Robustness of estimates, including the type of review the source is likely to have had.
Consistency. If alternative better estimates are not in such a wide range that an average is less meaningful except where explainable by expected sources of variation.
Timeliness. Preference to a recent period being covered by the estimates.
U.S. Economic Benefit Estimates
Preliminary estimates of economic benefits for included U.S. sectors totaled $55.8 billion in 2013. Averaging the alternative estimates, the sum of the benefits in the two vehicle categories is $25 billion, by far the largest of the sectors estimated. Next were agriculture with $13.7 billion, and surveying with $11.6 billion.
Economic benefits are underestimated for several reasons. Some sectors are not included because of lack of information on productivity and cost savings, namely LBS other than vehicle, including asset tracking and locating people; GIS and mapping other than nautical charts, forestry, fisheries, mining, energy exploration and development, land and coastal management, weather, and scientific applications and space.
Parts of others are not included: non-grain agriculture, construction other than earthmoving, GPS in aviation for some Area Navigation (RNAV) Standard Instrument Departure Routes (SIDs) and Standard Arrival Routes STARS) and Required Navigation Performance (RNP), and rail other than positive train control.
Some estimates are conservative. The value of saved time in non-fleet vehicle transportation is based on the recommendation of the Transportation Research Board rather than the much higher value used by the U.S. Department of Transportation.
Some types of benefits are not included — specifically, benefits of GPS timing applications above the cost of alternatives, and avoided income loss, property damage and medical costs associated with reduced accidents and improved emergency response.
Increases in benefits between 2003 and 2005 are not estimated.
And, as indicated, non-economic benefits such as those to health, safety, security, reduced loss of life and to the environment are not yet addressed.
Benefits as measured thus far are about 0.3% of GDP in one year. If all of the excluded sources of benefits were quantified, the benefits would be much larger.
Estimating Benefits for Sectors
U.S. economic benefits of GPS for grain farming were estimated for farms with grain sales of $250 million or more. The same method as was applied for earthmoving in construction.
A composite range of percentages of productivity gains and cost savings of 18–25% was determined from various studies. In the case of grain farming, benefits also come from yield increases due to improvements in plant health. The productivity gains used in the calculations incorporated both sources of benefits. Productivity was taken together with market size and an estimate of 68% adoption of technologies taking advantage of GPS to compute initial estimates of benefits. A notional adjustment was then made to exclude the contributions of other technologies and GNSSs. While having the adjustment determined by a group of experts would have been preferred, that was not possible with the time and resource constraints of the study.
Benefits of GPS machine guidance with earthmoving in construction were calculated based on an 8–12% share of construction for earthmoving operations, a benefit of 18–22% and a 20–25% adoption rate, relying on a number of sources.
For surveying, an estimate of market size was constructed based on U.S. Bureau of Labor Statistics data on numbers of surveyors, cartographers and photogrammetrists in the engineering services industry vs. the rest of the economy, together with revenue data for private surveying and mapping from the Economic Census. This was combined with a composite estimate of productivity gains over conventional surveying of 45–55% and an assumption of 100% adoption.
The benefit values for air transportation were estimated for the study by the Federal Aviation Administration (FAA) based on effects of WAAS and performance-based navigation (PBN). The rail estimates cover only positive train control, which is in early stages of implementation. Information is highly uncertain, but impacts as of 2013 are small. Maritime benefits were based on updating an earlier estimate of benefits of the private-sector value of nautical charts. The estimates for fleet vehicle-connected telematics were based on savings found in an extensive survey of fleet customers over a five-year period.
Timing benefits were based on the avoided costs from not having to develop an alternative source of timing. Alternatives considered were eLoran and a system of three geostationary satellites. Since there would have been strong pressures to develop an authoritative timing source in the absence of GPS timing, it was assumed that one of the alternatives would have been developed rather than assuming as in other cases that technologies in use when GPS became available would have continued in use.
Two estimates also were made for consumer and other non-fleet vehicle use. One was based on extrapolating results of a study of consumer willingness to pay for navigation services, and the other on time saved by navigation services.
Part of the benefits of LBS other than those that are vehicle-related and for GIS are implicitly included in estimates for sectors that use them.
Data and Research Needs
Additional work would be desirable to extend and refine the GPS economic benefit estimates, quantify safety-of-life and environmental benefits, examine international benefits, assess potential future benefits and consider loss from denial of GPS. Benefits of many new and rapidly growing services are yet to be quantified.
Systematic research is needed to fill in gaps in adoption, productivity and cost savings with comparative before-and-after studies as well as with case studies. Robust studies require major and often multi-year efforts involving targeted data collection, which are rarely done by government or academics for GNSS. Information needs to be much more granular, taking into account specific functions in which GNSS is used (such as plowing, seeding, fertilizing, harvesting), specific GNSS and non-GNSS technologies employed in each function at each site, and extent of their use.
Also, results for GPS might be improved or at least be more acceptable if the contribution of other technologies and GNSSs to measured benefits were assessed by a group of knowledgeable individuals rather than by a single researcher.
Information on market size, penetration and growth from market research firms, which tends to capture recent developments, is based on greatly varying sources and methods, resulting in major gaps and great divergence in estimates, especially in new or rapidly growing areas like LBS and GIS. The North American Industrial Classification System (NAICS) and its application in federal data collection such as in the Economic Census lags far behind in recognizing new categories and providing sufficient detail. Lags in data collection and research lead to understatement of the use and benefits of GPS.
Looking to the Future
Future benefits are expected to be even greater because of evolution of technologies, expansion of GNSS systems, creation of new products and markets, and growth and penetration of markets. The possibilities are suggested by the numerous nascent applications that have been emerging. Many will be enabled by expanding GNSS systems, signals and capabilities in conjunction with geographic expansion and increased capabilities in wireless systems.
The progression of platforms is long and growing: mainframes, PCs, mobile phones and other handheld devices, tablets, game controllers, wearables, TVs, home appliances, air and space — including planes, UAVs, satellites, planets, moons, rovers, rockets and spaceships.
The widespread availability of platforms and the growing ability to utilize them promises a long way to go in developing applications and deriving benefits.
Acknowledgments
The author thanks the PNT Advisory Board and Gov. Jim Geringer, liaison from the board to the study; Jason Kim of the Department of Commerce who oversaw the project; Jim Miller of NASA; and the members of the interagency Economic Study Team that advised the effort. Numerous additional people in and out of government provided information and assistance. Responsibility for the content and findings rests with the author.
IRV LEVESON, who has a Ph.D. in economics from Columbia University, is an economic and strategy consultant and founder of Leveson Consulting. He has done extensive work on GNSS markets and issues for more than 10 years. He is a member of the Institute of Navigation, the American Economic Association and the National Association for Business Economics.
Fundamental in the determination of GNSS solutions is resolving the correct number of full cycles of the carrier signal (so-called fixing ambiguities) in order to resolve the ambiguity differences between the base and the rover. Distances measured from GNSS receivers contain errors caused by inaccuracies in the satellite and receiver clocks, the satellite orbits, and by the ionosphere and troposphere. When a base station is used, these errors are nearly identical to both the rover and base station receivers when the baseline distance is short. By removing these common errors through RTK processing, centimeter-level accurate vectors can be calculated between the base station and the rover.
Multipath, the reflection of GNSS signals from nearby objects and structures, creates its own indirect measurements from the satellites to the GNSS receiver and is the most critical source of inaccuracy in precision GNSS applications. The worst case is when the receiver doesn’t see the direct signal at all, such as when satellite is behind a building but is still receiving the signal reflected off of the nearby structure. Such indirect signals are usually strong, unhelpful and misleading.
A TRIUMPH-LS collecting a point under tree canopy.
The other aspect impacting the veracity of a fixed solution is when there are weak GNSS signals. Frequently, weak signals are due to their penetration directly through tree canopy. While the TRIUMPH-LS can’t move the obstacles that are creating multipath out of the way, its sophisticated engineering is designed to handle even the weakest signals like no other system with its RTK Verification System (patent pending).
When located in difficult environments and under tree canopy, all GNSS receivers are prone to give bad fixed solutions that may appear to be acceptable if they are not verified. Existing methods to verify GNSS solutions include “dumping” the receiver, turning it upside down to cause the RTK engines to reset, and re-observing the point at a later time.
The TRIUMPH-LS automates these processes with its built-in software features of Verify and Validate. Verify automatically resets the RTK engines after every fixed epoch is collected in the first step of its process. Epochs are sorted by distance and placed into groups during the first step. Once a group has built up a set level of confidence, the RTK engines are allowed to collect the remaining epochs without resetting. If epochs fall too far away from the best selected group from the first step, they are rejected and the RTK engines are reset.
Validation is the final step of the process. With this feature enabled, the RTK engines will reset one final time at the end of the observation and collect 10 additional epochs. Allowing sufficient time between the first step and the final validation step will guarantee a bad solution is not allowed to be accepted. From extensive testing of these features in the worst of multipath environments, a bad solution has yet to be accepted when the Verify and Validate features are used and 120 epochs are collected.
After using a TRIUMPH-LS system, many land surveyors who have used other GNSS receivers in the past without preforming any type of verification are starting to realize that they may have accepted many bad fixed solutions over the years. If you are not using a receiver like the TRIUMPH-LS that has the ability to automatically reset the RTK engines and verify the results, it is essential that you manually “dump” the receiver or re-observe the point at a later time so that you don’t make this same mistake.
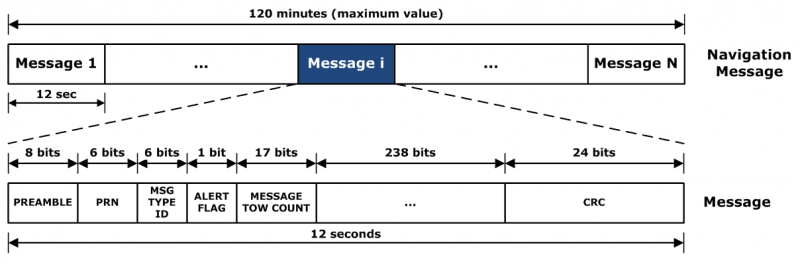
Are you using a legacy-model PNT (position, navigation and timing) receiver or a smart PNT receiver, and why does it matter? Don’t have a clue? Read on! Hint — L2C and CNAV (civilian navigation message format) are the major reason it matters. Yes, it’s all because of L2C, the controversial GPS civilian signal that seems to always be in the news and just keeps getting better the more we learn about it.
A couple of weeks ago, Alan Cameron, our esteemed editor in chief — penned a follow-on editorial comprised of excerpts from techies, subject-matter experts and editors, including yours truly, exchanging opinions about the flexibility, sustainability and capability of the GPS L2C signal and all that signal enables.
I won’t bother to go into the details or history of the L2C signal here, as I did that in excruciating detail 30 months ago. However, let’s consider L2C 30 months on and determine if the landscape has changed.
What is L2C?
According to the official U.S. government PNT website, “L2C is the second civilian GPS signal, designed specifically to meet commercial needs.” As it turns out, the military needs L2C as much as the civilian world, but that is a story for another time. When combined with L1 C/A (coarse acquisition signal) in a dual-frequency GNSS receiver, L2C enables ionospheric corrections, a technique that boosts accuracy. Civilians with dual-frequency GPS receivers typically enjoy the same or better accuracy as the military.
For professional and high-precision users with existing dual-frequency receivers, L2C delivers faster signal acquisition, enhanced reliability and greater operating range. L2C broadcasts at a higher effective power than the legacy L1 C/A signal, making it more jam and interference resistant, plus it’s easier to receive signals under trees and indoors. The U.S. Commerce Department estimates L2C will generate about $6 billion in economic productivity benefits through the year 2030. Considering there are more than four billion GPS users around the world today, the DOC economic benefits number seems rather low.
L2C Status
The first GPS IIR-M (R= Replenishment, M= Modernized with M-code and L2C) satellite featuring L2C launched on Sept. 26, 2005, and is still operational today. Every GPS satellite fielded since then (18 SVs, including SVN 49) has included an L2C transmitter. This equates to 16 operational L2C satellites on orbit and transmitting, with GPS IIF-10 being number 17 when it is fully commissioned. With 17 SVs (GPS satellite vehicles) on orbit, the L2C system is officially near Initial Operating Capability (IOC). With the requisite ground system upgrades, which are in the works, this means that on any given day most users will have at least one or more L2C signals in view. You can be sure manufacturers will be quick to take advantage of the geometry.
LMCO GPS IIRM Satellite Vehicle On Orbit. (Artist’s rendering courtesy of Lockheed Martin)
Legal Caveats
“In April 2014, the U.S. Air Force began broadcasting civil navigation (CNAV) messages on the L2C and L5C signals. Prior to that time, L2C and L5C provided a default message or Message Type Zero, containing no data. Adding additional CNAV message types required upgrades to the GPS control segment. On Dec. 31, 2014, the Air Force began transmitting CNAV uploads on a daily basis. L2C should continue to be considered pre-operational and should be employed at the user’s own risk.”
Now the lawyers are happy.
So What?
What does this mean for the average user? You might be surprised at the answer. Depending on how technical you are and exactly how you use GPS, it could mean that all your “legacy” GPS receivers are about to become obsolete. Or, depending on the company that builds your receivers and the amount of foresight they built in, it could just mean a few firmware upgrades and new applications.
Regardless, with the full implementation of L2C GPS signals and navigation messages, GPS will never be the same again. This is not to say your legacy receiver will not work just as efficiently as it does today, and in fact you will probably be able to use it quite effectively for years. But it will not be able to take full advantage of all the capabilities L2C enables without an upgrade, if indeed it is upgradeable.
Legacy versus Smart
No matter how much or how little you paid for your GPS/GNSS/PNT receiver, it is essentially — except for a few notable exceptions — a legacy receiver. For example Trimble is ahead of the game as they began producing L2C capable receivers as early as 2003 and are just waiting for the additional L2C messages to be defined. Again, those receivers that are not L2C-ready or capable are what I will classify as a legacy receiver, simply because of all the future capabilities that are missing. Your current PNT receiver may have the potential to be a smart receiver — it may have the technical capability to process far more than it does today. But, unfortunately, essentially almost every receiver, again with a few exceptions, on the market today falls into the “legacy ” category.
Is My Legacy Device Considered Obsolete?
Now that I have your attention and have probably riled more than a few GPS device manufacturers, please allow me to explain. In the past, your GNSS/PNT device (for brevity’s sake, I will default to PNT for the rest of the column) has basically performed a simple function. It displayed your position, and perhaps maps and other ancillary data (targets or destinations) after it received, decoded, verified and applied timing signals and a very small number of navigation messages.
It accomplished this feat typically from a cold start in under 120 seconds. Maybe much less. Recently, I was privileged to view a demonstration of a receiver from a major manufacturer that performed a warm restart in less-than-ideal conditions and displayed a useful position in 1/20th of a second. As amazing as that may be, it is still today classified as a legacy receiver. It accomplished its task; it supplied a useful position both in human and machine language that could be utilized by both. In the past, this was the task your receiver accomplished routinely. With the full implementation of L2C, all that changes and changes drastically. I call it a revolution for PNT, but alas I am frequently given to hyperbole. However, give me a moment and see if you don’t agree.
I was attracted to a Wall Street Journal headline recently by a company that I know well, since they have an abundance of well-known and multi-talented former military leaders. That company, Accenture, puts it this way: “Change is good. Transformation is even better.” That is exactly where I believe we stand today with L2C. It is a game changer.
For example, just this week in the WSJ, which I read cover to cover six days a week, I saw stories about Audi vehicles driving autonomously from coast to coast, over 3,000 miles without driver intervention. Contrary to many manufacturers, Audi is quick to credit GPS with a large portion of the proprietary Audi (VW) technology and the capability it enables. There was a story about commercial vehicles, over-the-road diesel trucks that may have even more capabilities than the Audi. Again, with GPS as the prime contributor. The same WSJ story mentioned that, “Some of the features being added to trucks are similar to those in cars, but generally the move to autonomy in commercial and industrial vehicles is far ahead of the autonomous systems offered on most passenger vehicles. Already, mining vehicles and military forklifts are operated without drivers.”
Amazingly, these capabilities depend greatly on GPS, but exist without the full implementation of the revolution that L2C, CNAV and multiple nav messages will bring.
L2C CNAV Message Structure.
L2C Ready
I have over the past year seen advertisements for PNT devices that proclaim they are L2C ready. I beg to differ, but only because my definition of L2C ready probably varies greatly from that of the devices’ marketing department. Beyond its signal structure, L2C has a new messaging capability.
As stated earlier, the L2C signal is heads and shoulders above most other GNSS signals in strength, code structure and security. L2C delivers faster signal acquisition, enhanced reliability, and greater operating range. L2C broadcasts at a higher effective power than the legacy L1 C/A signal, making it interference and jam resistant and easier to receive under trees and indoors. These attributes make it a great signal and when you consider the carrier-phase and RTK (real time kinematic) capabilities, which really are real-time today. It is a very appealing signal indeed.
For precision and timing users, the carrier phase of the L2C signal, non-coded carrier, is 1,000 times more stable than the fully coded L2C signal. The L2C carrier-phase stability will remain unchanged until the semi-codeless transition date of Dec. 31, 2024, per the FRP or Federal Radio Navigation Plan of 2014. Then officially all bets are off, but who knows? That date could be extended.
However, the real and future strength of the L2C signal structure is hiding in one or more (accurately 255 more, for a total of 256) messages that can be utilized in a myriad of ways and applications. These are messages, nav-messages if you will, that your new or updated PNT device will be able to utilize for who knows how many functions. Just use your imagination. Here are some ideas I have for using the additional L2C messaging capability.
Send 250+ other navigation messages, to be defined.
Send continuous atmospheric corrections (such as ionospheric) for each two degrees of longitude around the globe or in one degree increments if you consider land mass applications only.
John Deere and Trimble as the leading commercial and civil providers of navigation data could appropriate a small fragment of the messages for their global navigation and timing corrections to their agricultural and precision users/customers around the globe.
Companies or governments could send nominal navigation or even text-based navigation-related messages to users anywhere an L2C signal can be received.
Companies could shut down and render useless receivers from users that have not paid their bills or were abusing the system.
Companies could send small firmware updates or notices of larger updates directly to users. Data could include active hyperlinks.
Precision, scientific and premium users might have the capability to receive constant correction updates that make their PNT receiver a centimeter or potentially a millimeter level device.
Receivers with communications — four billion plus smartphones and other devices with PNT capabilities and built-in communications — could become sensors capable of being sampled at will. These devices have the potential to be considered remote monitoring stations both for PNT and communications purposes. They could report both communications and PNT jamming or interference. They could also help track intentional jammers.
If you think about it hard enough, you will see that this modest list of capabilities with the proper security either make spoofing an impossibility or without proper security a malicious nightmare.
I hope by now you catch my drift and have come up with some ideas of your own concerning how the additional 250+ L2C messages could be utilized. We’re unsure how many messages will actually be available or how the messages will be used. The government will, out of operational necessity, require a small number, so right now your guess is as good as mine.
Keep in mind that L5C and M-code will have the same capabilities on differing frequencies, and different governing bodies will decide how the signals and 750-plus multiple-messaging capabilities are allocated and utilized. That is all hopefully in the near future. How that process unfolds, technically and operationally, will have a great deal to do with how successful and ubiquitous L2C becomes. The process alone will undoubtedly spawn thousands of articles; however, right now we are primarily discussing the necessity for smart receivers to fully utilize the additional L2C messages. For along with all the potential capabilities comes a processing and communications tail that does not exist today, except in a few instances that we can’t go into in this venue.
Relative
This is probably a good time to further qualify what I mean by legacy versus smart receivers. Were the appellation “legacy” not already in our vernacular concerning today’s highly functioning devices, it would not be one I would have chosen. However, it is and we are stuck with it. Consider that there are static high-end (read premium quality) single GNSS receivers that “see” more than 50-60 separate GNSS satellite vehicles and processes more than 150 GNSS signals. This does not take into consideration all the augmented and companion signals some of these devices are capable of processing. Many of these devices are very difficult to jam and literally cannot be spoofed, and still today they are legacy receivers in relationship to L2C capabilities.
However, I am told such high-end receivers are absolutely L2C ready, which may mean the additional L2C messages are ready to be processed and applied, received or rejected, whenever they are properly and officially defined. This brings us to the future definition or next generation smart L2C receiver.
Smart L2C PNT Receiver
For the first time a smart PNT L2C capable receiver will have the ability to:
Select between GPS only, GPS + GLONASS, or full GNSS mode with ancillary corrections such as WAAS and EGNOS, and work with, process or reject messages, making a decision about some or all the signals it has in view. While there are receivers that accomplish some of these functions today, they do not typically have the option of accepting or rejecting a GPS navigation message if it is properly formatted and verified. L2C smart receivers will — indeed must — at a minimum possess and correctly utilize that capability.
Alert users concerning new navigation message(s) and determine automatically or with user input whether the navigation message should be applied immediately, in the near future, put on hold or totally rejected.
Alert users to the effect that applying new or multiple navigation messages will have on the current PNT display and possibly the current mission or operation. For example, if you are a precision user, think millimeters for level of accuracy, utilizing PNT to measure tectonic plate movement — you are very interested in relative displacement over time and you may have no desire to apply a multiple nanosecond correction that could move your current measured position several inches or feet. If you are a geocacher, you do not want the coordinates of your latest buried treasure to dynamically change.
Determine if the latest valid navigation message(s) apply to your geographic area or, for mobile receivers, your destination, and what effect incorporating the messages will have on your displayed position or ETA.
Display a text-based navigation message if it is addressed to your device.
Require password(s) for certain actions — be they sensitive, proprietary, classified or of a “cannot undo” nature. Passwords could also be required in the message format before it could be unlocked and applied.
Determine and alert users if multiple navigation or device-control messages conflict with organizational or user-defined parameters.
Alert users to malicious messages or spoofing attempts.
Alert users to GNSS assets that are no longer available or go offline, such as during the two total GLONASS constellation shutdowns when GLONASS signals were not available for several hours. In the case of Apple iPhones, the GLONASS constellation-wide shutdown meant these devices went from multiple GNSS devices to “GPS plus PNT augmentation (WAAS) and other onboard sensors” devices. This is something many users may not care about, but is definitely worth a user-defined parameter for a warning message.
The ability to permanently reject a certain type of message by type, source, timeframe, etc.
By now, I hope you see the trend. You can probably think of many more possibilities for future GNSS or PNT receivers and the necessity for them to be loaded with computing and communications capabilities, especially where L2C is concerned — indeed, where all the CNAV signals and messages are concerned.
Bottom Line
The bottom line is L2C is a potentially revolutionary signal for GPS/PNT; it opens incredible opportunities for entrepreneurs, manufacturers and users at a minimum. We now all have some hard and important questions to consider before we purchase our next-generation PNT device or upgrade our legacy device.
Until next time, happy navigating, and I hope to see everyone at ION GNSS+ in September in Tampa, Fla. Remember, GPS is brought to you courtesy of the United States Air Force.
I follow the surveyor connect message board and have seen some general discussion of the form factor of the Javad Triumph LS. I wanted to go into a little more detail on the form factor and portability of a couple of the receivers in the Javad GNSS lineup.
Most surveyors that have been using RTK GPS equipment have been trained to keep their rod height at 2 meters to reduce error in rod height adjustment and to be able to get above general multipath hardships. This is not required with the Javad Triumph LS. The advanced multipath reduction of the Triumph LS gives the surveyor the flexibility to have the receiver anywhere from just over 1-foot high to as high as your pole may reach. The Triumph LS comes standard with a collapsible monopod pictured here.
With the Triumph LS being an advanced GNSS receiver and data-collection system all in one, you may ask. “But what if I have to raise the pole above an obstruction to get a shot?” The Triumph LS is equipped with an audible tone and time-delayed shot setting, an internal level, an internal compass and a flashing LED light on the bottom of the receiver that all work together to allow the surveyor to collect points on objects with the receiver high above the surveyor’s head (out of sight). The LS is also equipped with a proximity sensor that will allow you to take a shot even if you cannot reach the receiver’s screen. For instance, you are out in a swamp and you can reach out and get the pole generally level (with internal tilt compensation turned on), but you cannot reach up and start collecting the shot. Wave your hand or a lath in front of the LS, and it will start recording your shot. So no matter your height or the height of the obstructions, you can still get the shot that you need.
The form factor of the LS, while it is much different than what we are used to using, works extremely well. The LS rover paired with a Triumph 2 base is one of the most portable systems on the market as well. The Triumph LS, Triumph 2, 4-watt external UHF radio and UHF power cable all fit into a small camera bag.
This is the system that I personally use on a regular basis. I find that the ability to collapse the monopod allows me to easily use both hands while riding on a four-wheeler along with the ability to easily pack up the system on the four-wheeler to set up the base in more remote locations. With nearly two years of using this system, the form factor has not once been an issue. Quite the contrary — the form factor makes it much easier to navigate dense brush and have more control over the equipment.
For more information on Javad’s J-Field software, the Triumph LS or other Javad GNSS solutions, please feel free to visit www.javad.com, email [email protected] or call 1-888-550-5301 or 1-408-770-1770.
The Leica Geosystems ZenoCollector2 comes with Esri Collector for ArcGIS.
Esri Collector for ArcGIS, a configurable mobile app for collecting and editing data in the field, has combined with the Zeno 20, Leica Geosystems’ ultra-rugged Android-based professional-grade handheld, in a new solution called ZenoCollector. ZenoCollector uses Collector for ArcGIS as its main user interface and comes bundled with an ArcGIS Online organizational subscription for one year.
“Esri and Leica Geosystems recognize that enterprises may have particular field data collection challenges that smartphones can’t ideally meet,” said Esri president Jack Dangermond. “We’re excited to combine Collector for ArcGIS with Leica Geosystems’ industry-standard surveying units to create a more rugged and accurate solution for the more exacting needs of organizations.”
ArcGIS Online connects ZenoCollector to the ArcGIS platform, automatically syncing field changes to enterprise information and giving everyone access to the latest data gathered in the field. Collector for ArcGIS also supports offline data collection. Any updates will be synchronized with the map once the user is reconnected.
“We’re excited to raise mobile data collection solutions to the next level of precision and interoperability through rigorous connectivity between our survey-grade Leica Zeno series and Esri’s GIS solutions,” said Hexagon Geosystems President Juergen Dold. “This industry collaboration between Leica Geosystems and Esri is another joint commitment to make it easier for professionals around the world to capture, manage, and share their data, regardless if they’re in the office or the field, without sacrificing precision or interoperability.”
Although Collector for ArcGIS is most often used on smartphones, field crews may need higher precision that only a dedicated survey device can deliver. ZenoCollector contains a professional-grade GNSS receiver that provides significantly higher position accuracies than GPS receivers on smartphones and other handheld GIS devices on the market.
Leica’s Zeno series devices are also waterproof, even with the latch open, suiting the requirements of organizations operating in wet environments that would stress the tolerances of consumer-grade mobile devices.
From our July issue comes this showcase featuring products for surveyors, geographic information systems (GIS) professionals, field workers, and anyone who is looking to expand the capabilities of their smartphone or tablet.
Dedicated Survey/Geospatial
Three-Accuracy Series
The LT500 series of handheld GPS receivers, LT500H/T/N, covers three accuracy ranges from sub-meter to centimeter. It is a cost-effective full GNSS positioning solution for survey, construction and GIS professionals.
Powered by the Windows Embedded Handheld 6.5 operating system, the LT500 is accurate, rugged and versatile. User productivity is enhanced with the built-in gyroscope, an innovative laser plummet for positioning the accurate handheld receiver over a point, an E-compass for showing the direction and G-sensors for leveling. The LT500 series comes bundled with software including SurvCE, DigiTerra and MapCloud. The LT500H has120 channels (GPS L1/L2/L2C, GLONASS G1, G2, BeiDou B1 and Galileo E1), the LT500T has 220 channels (L1, G1, B1), and the LT500N has 12 channels (L1).
The all-in-one TRIUMPH-LS by JAVAD GNSS combines a high-performance 864-channel GNSS receiver, all-frequency GNSS antenna, and a modern featured handheld. The 864 all-in-view channels include Galileo E1/E5A/E5B, GPS L1/L2/L5, GLONASS L1/L2/L3, QZSS L1/L2/L5, BeiDou B1/B2 and SBAS L1/L5.
More than 100 channels are dedicated to continuous interference monitoring, allowing safe GNSS operation in a city, airport and military environment.
The GEOmeter MX system is designed to gather GIS information in heavily wooded areas, with object description, area coordinates and measurement time grasped automatically. The system consists of the GEOsat MXbox receiver, a combination antenna, a PDA such as the Trimble Recon or the Handheld Nautiz X8, and GEOfield software for mobile GIS.
The Mxbox receiver is a Hemisphere multi-constellation GNSS OEM board with GPS, GLONASS, BeiDou, Galileo and QZSS, plus code- and carrier-phase tracking for increased positioning accuracy and availability. The GEOfield software offers reliabe recording, representation and processing of geodata. Measurement quality is indicated in the field with statistics and graphics, in either German or English.
The Matchstiq S10 is a software-defined radio (SDR) platform. It provides increased RF flexibility, RF performance and signal processing capacity in a small package. The Matchstiq S10 platform combines the Epiq Solutions’ Sidekiq SDR with a quad-core processor system running Linux. The Sidekiq MiniPCIe SDR card provides an independently tunable RF transmitter and receiver covering 70 Mhz to 6 Ghz with an RF bandwidth up to 50 Mhz, plus FPGA. The Matchstiq S10 platform also integrates GPS, Gigabit ethernet (with PoE), USB 2.0 OTG, HDMI and real-time clock in a very small form factor package.
Leica Captivate software provides a 3D view for the Leica Viva GNSS, merging the overlay of measured points, 3D models and point clouds into a single view.
Using Leica Captivate, users can capture and manage complex data with the touchscreen on both the Leica CS20 handheld controller and the CS35 tablet.
The CS20 runs on Windows EC7 and is IP68 and MIL-STD-810F rated. It has a 5-inch WVGA color touchscreen that allows for comfortable and quick data processing and a fully integrated radio and antenna for long range robotic total station control. The CS35’s 10.1-inch screen is visible in all conditions. It runs on Windows 8.1 Pro, enabling workers to take their office into the field. It is IP65 and MIL-STD-810G rated.
The FOIF F55 series GIS handheld comes in two models: F55-A and F55-B. The onboard software FOIF SuperGiS allows users to conduct field mapping with powerful functions for data collecting, data editing and data querying.
The F55 measures 234 x 99 x 56 mm and weighs 895 grams. It has an IP65 rating for water and dust protection. The F55-A supports four GNSS (GPS, GLONASS, Galileo and Beidou) as well as SBAS, and can search for up to 120 channels. The F55-B supports GPS and SBAS and provides 12 channels.
With Differential GPS, the F55-A has an accuracy of 0.4 meters, and the F55-B has an accuracy of 0.5 meters. RTK surveying on the F55-A obtains high precision of 1 cm + 1 ppm. Real-time correction service and post-processing are available.
The geoDVR Gen2 is an advanced multi-channel high-definition/standard-definition geospatial digital video recorder designed for aerial and mobile environments.
Unlike a DVR, the rugged geoDVR permanently embeds videos with important GPS location, time and other data — the GPS metadata remains intact even when a video is edited. Most video cameras and gyro-stabilized gimbals can be connected to the geoDVR for recording of HD or geospatial video files.
Video files created by the geoDVR can be analyzed in the RemoteGeo LineVision suite of mapping applications, including tools for Google Earth, Esri ArcGIS, PLS-CADD and the LineVision Cloud. The administrative dashboard allows for monitoring up to four video streams in real-time.
The G1-m1 receiver is part of the G1 family of products from Geomatics USA. The G1 system is scalable from a single-frequency semi-mobile receiver — for control networks and some semi-kinematic mapping applications — to a dual-frequency network RTK solution. It was designed to be lightweight, accurate and portable, especially suited to building a system for travel; for example, all the G1-m1 components, including tripod, will easily pack into a baseball-style bag for transport. The G1-m1 offers centimeter and sub-foot accuracy (centimeter-level accuracy is possible for OPUS-compliant static sessions).
The Panasonic Toughpad FZ-M1 is a thin, light and rugged 7-inch Windows tablet with dedicated GPS — the u-blox Neo M8 series — as an option. The FZ-M1 is built to enable mission-critical mobile worker productivity. Powered by Windows 8.1 Pro and a choice of two Intel processors, it features a long life, user-replaceable battery and a daylight-readable, high-sensitivity multi touchscreen for use with heavy gloves. With a broad range of configuration options, the customizable Toughpad FZ-M1 is rated MIL-STD-810G and IP65, resistant to five-foot drops, weather, dust and water.
Trimble’s RTX technology-based correction services — Trimble CenterPoint RTX, Trimble RangePoint RTX and the new Trimble ViewPoint RTX — are now available on Trimble Geo 7X handhelds.
Trimble RTX technology provides compatible GNSS receivers with correction services that significantly improve accuracy and reliability in obtaining positions worldwide. Operational efficiency and productivity in the field is improved by delivering real-time DGNSS corrections directly to the Trimble Geo 7X handheld.
The handheld solution is designed for industries such as utility companies, municipalities and environmental management agencies, in which workers are highly mobile and require a reliable, flexible data-collection and asset management solution.
A choice of RTX correction services ranging from 4 centimeters to submeter-level horizontal accuracies is available.
The Spike device and Spike mobile app allow users to measure an object by capturing a photo from a smartphone or tablet. From the photo, users can capture real-time measurements, including height, width, area, length and target location. Location data includes latitude, longitude and altitude. Spike is useful for construction, inspection, safety, advertising, real estate, insurance and government applications.
Measurements and location data are saved with the picture and can be shared via email as a PDF, XML and KMZ. KMZ files can be imported into GIS tools such as ArcGIS and Google Earth. The photo can be referenced via the Spike app to take new measurements or view original measurements.
The Spike device pairs with an Android or Apple iOS smartphone or tablet via Bluetooth. Its laser rangefinder works with a smartphone’s camera, GPS, compass and Internet connection.
The iSXBlue II+ GNSS is a palm-sized receiver that delivers real-time, high-accuracy performance using GPS+GLONASS satellites and free SBAS corrections for an iPad or iPhone. Its battery-powered lightweight design is for a variety of mapping applications including GIS, forestry, mining, utilities, agriculture, surveying and environmental. It delivers high accuracy in real time without the need for post-processing or another correction source when SBAS (WAAS, EGNOS, MSAS or GAGAN) are available. Using both GPS and GLONASS satellites, the iSXBlue II+ GNSS will work where GPS receivers struggle, such as in the forest, around buildings and in other difficult mapping environments. The L1/G1, GPS+GLONASS receiver has 372 channels.
TerraGo Edge allows organizations to collect data and share field information on their smartphones and tablets. TerraGo Edge replaces traditional GPS handheld devices with a mobile cloud-based solution. Users can collect GPS data points at any accuracy level, either by using the onboard GPS on a smartphone or by attaching a centimeter-level GPS receiver to a mobile device.
TerraGo Edge 3.6 features enhanced support for high-accuracy GPS receivers such as EOS and SXBlue on both iOS and Android, as well as better mapping features, basemap sources and integration with Google Earth.
For managers, TerraGo Edge provides a real-time dashboard for monitoring field users and data collection.
MachineryGuide enables a tablet or smartphone to be used as a precision tractor GPS system. The MachineryGuide Android guidance program functions as a precision farming application using an antenna capable of receiving and processing EGNOS and WAAS corrections. It can be used for any farming activity that is done by tractor or other agricultural machinery, including fertilization, manure application and spraying. It even can be used for land measurements.
MachineryGuide sells the software separately; a GNSS receiver + antenna separately; and a package bundle that includes software, GNSS receiver and antenna. The receiver uses GPS, GLONASS, SBAS and QZSS signals for a position accuracy of 2.5 meters CEP.
The TomTom Bandit Action Camera allows creation of videos within moments of the action. It comes with a built-in media server, eliminating the need to download footage before editing. The camera works with a companion app, making it possible to create and share videos in a matter of minutes — by shaking a smartphone.
The TomTom Bandit Action Camera is equipped with in-camera motion and GPS sensors to automatically find and tag footage based on speed, altitude, G-force, acceleration and heart rate. Highlights can also be tagged manually with a tagging button on the camera or the remote control.
The Forerunner 225 integrates optical heart-rate technology by Mio and features a colorful graphic interface showing runners their zone and beats per minute at a glance. A built-in accelerometer provides distance and pace data for indoor running with no need for a separate foot pod. To keep runners active between workouts, it doubles as an activity tracker, counting steps, calories and distance.
When paired with a compatible smartphone, the Forerunner 225 will automatically upload a completed run to the Garmin Connect Mobile app for post-run analysis and sharing on social media sites. Runners can also use live tracking to allow friends and family to follow along during training or on race day to see stats in real time.