For 30 years, Spirent Communications has built GPS/GNSS simulators, operating at the radio frequency (RF) level and building a broad customer base. Now, with the launch of SimIQ — which starts shipping at the end of October — the company is providing simulation at the I/Q level. (When talking about frequency mixers, the “I” stands for “in phase” and the “Q” stands for “in quadrature.”)
SimIQ is in response to requests from receiver experts, who want to be able to test their receiver algorithms earlier in the development cycle before designing the Application Specific Integrated Circuits (ASIC) or the Field Programmable Gate Arrays (FPGA).
“They used to come up with their own individual mechanisms to generate I/Q data and test it,” said Ajay Vemuru, product line manager, NPI, Spirent. “For example, you can use programs that you develop on MATLAB to come up with I/Q data files, but that requires an effort in debugging them and keeping them up to date with the different constellations.” That effort grows as the number of GNSS constellations grows. SimIQ will use the same software as Spirent’s current simulator. However, instead of generating the RF signal, it will generate the I/Q data.
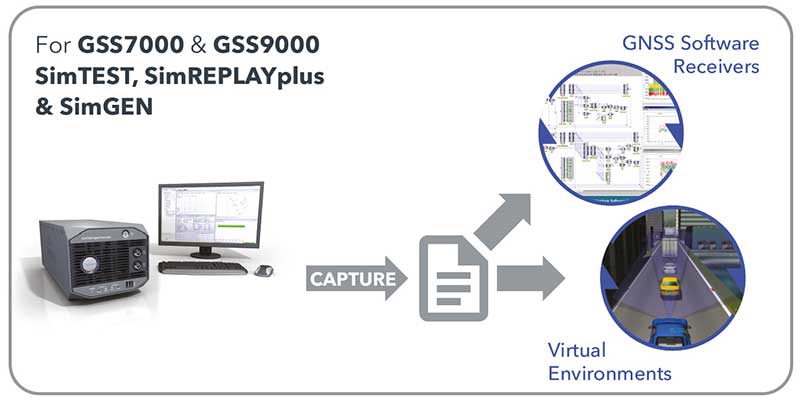
Any GNSS receiver, Vemuru explained, contains a radio that receives the RF signal and down-converts it to create a baseband digital I/Q signal. “That is the I/Q data that we are generating,” he said. “Instead of customers waiting for the RF or the ASIC to be completely designed, they can now take the I/Q straight out of our simulators, inject that into their algorithms, and run their correlators. You can run all your processing on this I/Q data without having to worry about the antenna characteristics and the front-end noise. You can pick and choose which pieces of the receiver you want to test.”
Because the software has not changed, the scenarios — such as the movement of the platform — are the same as before. Plus, customers can reuse them, running them at the I/Q level instead of the RF level.
While Vemuru expects many of Spirent’s customers to be interested in SimIQ, he also anticipates new and evolving markets might take advantage of it. “There will be new teams in existing markets that we haven’t reached because they are engaging an earlier phase of the design process,” said Adam Price, director of PNT simulation at Spirent. “We want to target earlier phases in chipset development.”
In the world of autonomous vehicles, Price explained, engineers are doing significantly more simulation in software to verify more “corner cases” — jargon for problems or situations that occur outside of normal operating parameters, such as when multiple environmental variables or conditions are simultaneously at extreme levels. “As you start to get into safety-critical systems, for example, software simulation is becoming increasingly required,” Price said. “This could allow us to engage that segment. People want to carry out verification earlier in the design cycle.”
By running a simulation in hardware and presenting the devices being tested with a real RF signal, Price points out, engineers are limited to operating in real time. By contrast, in software they can run simulations faster or slower than in real time and even run several simulations in parallel. This is important for developing autonomous vehicles because engineers need to test many scenarios over millions of miles of simulated travel.
Spirent’s SimIQ, however, is addressing a somewhat different market, Vemuru said. “In fact, they would prefer to run slower than in real time because their ASIC or FPGAs are not yet in production. So, they would be essentially running them on CPUs, which take a lot more processing time.”
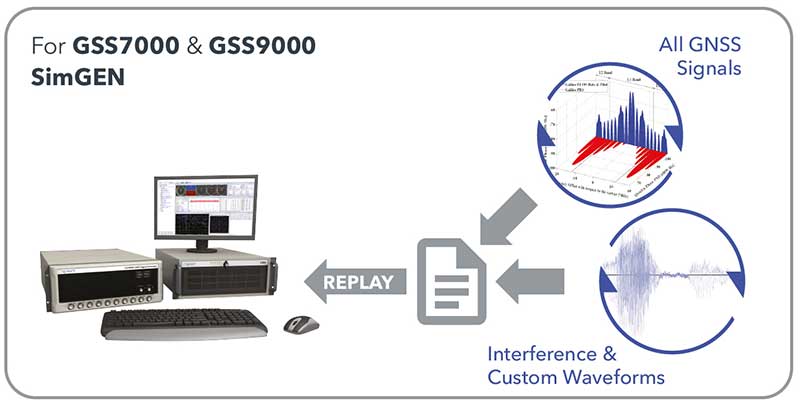
So far, we have been talking only about capturing I/Q data. However, SimIQ can also replay it. This, Vemuru said, “is essentially for customers who want to add interference patterns that, for some reason, they don’t want Spirent or anybody else to see. It can be any signal, so long as it is within the frequency of the GNSS spectrum. They can inject I/Q files into the platform itself. We take the external I/Q stream, generate the GNSS signals, add them up, and generate this at the RF level.”
One use case deals with classified signals. “They can always generate baseband I/Q data of that classified signal, as a file, and inject it into our simulator, so that we can generate the RF signal for that particular classified I/Q signal alongside the GNSS that already comes out natively from our boxes,” Vemuru explained.