CHC Navigation has launched a new website to convey its expanding role as a provider of geospatial and GNSS products and solutions.
“Our new website provides a clear insight of who we are and where our ambition lies when developing, delivering and supporting high-end, professional and innovative GNSS-based solutions to our customers,” the company stated in a press release. “The website offers extensive refreshed and updated resources presenting the entire scope of CHCNAV solutions to make any surveying work more effective.”
In commenting on the new website, George Zhao, CEO of CHC Navigation said, “We have been enjoying double-digit growth for over 16 years demonstrating the strength of CHC Navigation in the professional GNSS-based markets. Our new website brings a comprehensive vision of our technology and innovation, expanding compelling solutions and our global customer care approach.”
Founded in 2003 and based in Shanghai, China, CHC Navigation creates GNSS navigation and positioning solutions.
NavtechGPS is offering the following multi-day training sessions on GNSS/GPS technology in New Orleans this December. Both courses will take place at the InterContinental New Orleans Hotel.
Take this 4-day course to gain a comprehensive understanding of GPS/GNSS system concepts, design and operation, including information on GPS signal processing by the receiver; techniques by which GPS obtains position, velocity and time and a brief introduction to differential GPS (DGPS) and Kalman filtering.
Expanded to a full five full days based on attendee requests, this course on GPS-aided navigation will thoroughly immerse you in the fundamental concepts and practical implementations of the various types of Kalman filters that optimally fuse GPS receiver measurements with a strapdown inertial navigation solution. The course includes the fundamentals of inertial navigation, inertial instrument technologies, technology surveys and trends, integration architectures, practical Kalman filter design techniques, case studies, and illustrative demonstrations using MATLAB.
Five fulls days allow for a fuller and detailed development of the design of an aided navigation system, combined with a detailed discussion of the use of lower quality IMUs, and advanced filtering techniques.
Komatsu America Corp. has introduced Proactive Dozing Control logic, a fully-integrated dozing control system that allows operators to perform auto-stripping, auto-spreading, high production dozing and finish grading.
Built on the company’s intelligent machine control, the system uses GNSS positioning in conjunction with an inertial measurement unit (IMU) to calculate precise position. The two sensors work together to calculate exactly where the tracks are on the ground.
The machine control system communicates with the dozer’s hydraulic controllers, engine controllers and the machine controller. Through cylinder sensor technology, the position of the blade is calculated in relationship to the machine body.
The Proactive Dozing Control logic measures the surrounding ground and determines what has been done on the area being graded, then stores that data and information. When the dozer prepares to go back over that area to cut or work it more, the system understands what it was like from its previous track and, therefore, follows the existing terrain — the very terrain that was just created.
Proactive Dozing Control logic provides real-time position of the machine on the job site to create a highly accurate elevation for the system to drive the blade to the precise grade needed. Using real-time conditions, the system understands what the terrain around the machine looks like and makes calculated decisions — whether it should cut and carry material, whether it should spread or fill that material, or whether it should be finish grading.
The new system is available on the Komatsu D51EXi-24, D51PXi-24, D61EXi-24 and D61PXi-24 dozers.
Photo: Komatsu
“Proactive Dozing Control logic opens up a world of application possibilities for machine control technology,” said Derek Morris, Product Marketing Manager, Intelligent Machine Control and Smart Construction for Komatsu. “Traditionally, GPS machine control focused on finish grade, which meant operators only used the technology approximately 10 to 20% of the time. Proactive Dozing Control logic is a game-changer because the integrated system now lets operators use automation any time, whether for general site clean-up, backfilling trenches and more.”
“A key differentiator is that our system collects data at the tracks, while aftermarket solutions collect data at the blade,” Morris noted. “Because data is collected at the track, the system provides a real-time picture of the ground around the machine, allowing the system to make calculated decisions based on the current terrain. By collecting data at the track level, we’ve created machine control that is far more advanced, offering an entirely new level of efficiency, whether you’re an operator who has 20 years’ experience or someone new to the job, our Proactive Dozing Control logic provides precision work every time, making operation easier and more productive.”
With Komatsu’s Proactive Dozing Control logic, operators can use the dozer to its full capacity, leading to increased utilization, better ROI and better production. Owning and operating costs are also lowered because wear and tear on the machine is reduced by automating operation, Komatsu stated in a press release.
By significantly minimizing track slip during operation, undercarriage wear is reduced, thereby lowering O&O costs, since 50% of the ownership cost of a dozer is the undercarriage.
Skylark is now available across the contiguous United States, enabling safe and lane-level accurate positioning.
Swift Navigation’s network-connected Skylark precise positioning service is now available throughout the United States. Full contiguous U.S. (CONUS) coverage reduces initialization times to seconds, ensuring high-accuracy, high-integrity positioning is available when customers need it.
Swift Navigation is a San Francisco-based tech firm providing centimeter-accurate GNSS positioning technology for autonomous vehicles, and the maker of the Piksi Multi and Duro GNSS receivers.
Skylark is built for autonomy at scale and delivers lane-level precision, with safety-of-life integrity, required by mass-market automotive and autonomous applications. Skylark is a scalable network delivering a continuous stream via the cloud of robust, reliable, multi-constellation, multi-frequency corrections, with the latency, security, precision and reliability required for safety and autonomy.
“Since Skylark was introduced last year, the Swift network team has been hard at work deploying infrastructure across the country,” said Rob Hranac, COO of Swift Navigation. “This extensive network helps remove hurdles in precise positioning for our customers and we look forward to partnering with those customers as we expand Skylark internationally.”
Skylark is designed to address the needs of automotive original equipment manufacturers (OEMs) by supporting ASIL-rated (Automotive Safety Integrity Level) systems and Ntrip2 (Networked Transport of RTCM via Internet Protocol) connections in cloud reference station (CRS) mode. It is state space representation (SSR) ready — an emerging industry format.
Skylark is hardware-independent, giving customers a choice in today’s rapidly improving and commodifying the GNSS sensor ecosystem. OEMs are able to benefit from the lane-level positioning Skylark delivers using a host of third-party receivers in addition to Swift’s Piksi Multi and Duro receivers.
Unlike legacy real-time-kinematic (RTK) services designed for smaller regions and precise point positioning (PPP) services that suffer from slow convergence times, Skylark is a high-performance hybrid nationwide U.S. network that delivers initialization times in seconds, better than 10 centimeters of accuracy and integrity required by the most demanding safety-of-life critical applications.
When used with Swift’s Starling positioning engine, Skylark is capable of delivering protection levels (PL) down to 1 meter and target integrity risk (TIR) down to 10-7/hour. Engineered for automotive functional safety standard ISO 26262 (ASIL B), Skylark is designed and built from the ground up to support next-generation GNSS applications, connected car, V2X and advanced driver assistance systems (ADAS).
Skylark packages GNSS precise positioning as an affordable subscription service for ease in deployment for large-scale autonomous vehicle fleets.
By Jeremy Onyan, Director, TIme Sensitive Networks, Orolia
Cybersecurity is critical to all facets of the internet. Companies spend millions on cybersecurity every year. Still, often-overlooked areas degrade security. A key example of this is time.
Time plays an essential role in synchronizing core business and network systems. It supports authentication protocols as well as accurate log files critical for an audit trail — necessary for any cyber forensics program. As such, synchronization is often a requirement for network security standards.
A deployment of network time protocol (NTP) synchronizes a local system to a time server. The time source can come from within the network or outside of it.
NTP over the internet. NTP time servers are widely available on the internet. National authorities operate internet time servers based on extremely accurate atomic clocks, such as the National Institute of Standards and Technology (NIST) or the U.S. Naval Observatory.
But even with these sources, many factors impact traceability. According to ntp.org, “If business, organization or human life depends on having correct time or can be harmed by it being wrong, you shouldn’t ‘just get it off the internet’.”
One problem with time synchronization is the variability of network conditions. Network load, variable path delays and firewall settings can impact time quality on the local system. To illustrate this effect, we can use the time-quality monitoring feature of a time server with a built-in GPS receiver as its reference that is accurate to tens of nanoseconds. NTP can be used to compare it to another GPS time server on a local area network. The offset is around 15-20 microseconds (Figure 1).
Figure 1. The comparison between two GPS time servers on the same LAN using NTP results in 15–20 microseconds offset. (Chart: Orolia)
We connected the SecureSync time server to some of the most popular internet time servers. The variation result, shown in Figure 2, is as high as tens of milliseconds — 1,000 times worse than NTP across a local area network. If we assume all the time servers are accurate, then the difference is solely due to greater path delay and other dynamic conditions. This variation is enough to question the traceability of time from the internet.
Figure 2. The comparison of internet time servers as measured by NTP on a local GPS time server. The scale is 1,000 times greater than in Figure 1. (Chart: Orolia)
The internet obscures time traceability. Perhaps more important for a security-critical network is the validity of the source used by the time server that distributes time to your network. Time from GPS/GNSS signals is recognized as the most accurate, available and traceable time source.
GPS/GNSS-based time servers are easy and simple appliances to add to the local network. Even when different GPS/GNSS time servers are deployed in different locations, they will provide the same time regardless of geography. What’s more, GPS/GNSS as a local time source can be monitored, so its logs can become part of the audit trail.
Of the seven internet time servers monitored over a 24-hour period, 20 different time sources were identified. Less than half of the sources could be identified as coming directly from GPS/GNSS. In one case, GPS/GNSS time was distributed through three different time servers.
The best practice of using NTP server pools is one reason why there are more sources than time servers. Server pools rotate among various internet time servers, each with their own source of time, to reduce the chance of one bad or unavailable time server catastrophically affecting the synchronization. But this is a problem for traceability. The source of time is not known, nor can it even be determined.
Indeterminate source identification, indeterminate accuracy variation and the inability to log the resulting time synchronization calls into question the efficacy of getting time from the internet. Internet time servers are also subject to being spoofed (bad NTP data sent from a faked IP address) and to direct attacks, including NTP poisoning, replay and denial of service.
When there is a business-critical need to trace time to an accurate source, a GPS/GNSS-based time server should be deployed on the local network.
How will wireless technologies most significantly drive change and innovation in the surveying industry?
Miguel Amor
“GNSS by design, by physics, will always be challenged in urban settings. 5G and GNSS will provide a step to ubiquitous positioning in built-up areas — a blend of relative and absolute positioning, terrestrial and satellite-based measurements.” Miguel Amor Hexagon Positioning Intelligence
Greg Turetzky
“The improvements in bandwidth and latency of 5G will create new opportunities for edge and cloud-based computing advances such as AI and machine learning to penetrate surveying, as 5G is doing in other industries, to improve efficiency, accuracy and automation.” Greg Turetzky Consultant
Members of the EAB
Tony Agresta Nearmap
Miguel Amor Hexagon Positioning Intelligence
Thibault Bonnevie SBG Systems
Alison Brown NAVSYS Corporation
Ismael Colomina GeoNumerics
Clem Driscoll C.J. Driscoll & Associates
John Fischer Orolia
Ellen Hall Spirent Federal Systems
Jules McNeff Overlook Systems Technologies, Inc.
Terry Moore University of Nottingham
Bradford W. Parkinson Stanford Center for Position, Navigation and Time
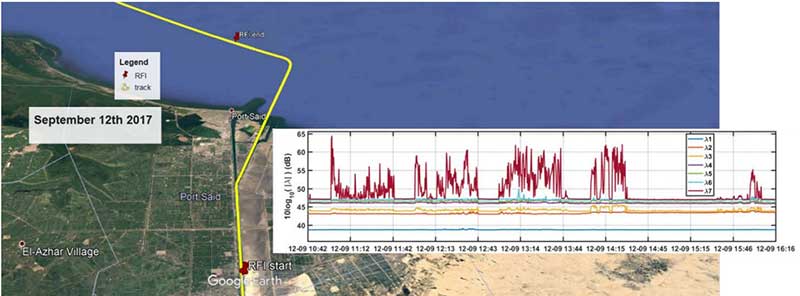
A year-long project aboard a commercial cargo ship collected tens of thousands of snapshots of radio-frequency interference in the GNSS band on a passage from Spain to Korea and back. Most interference was detected in busy port areas, less interference while transiting along coasts, and while least frequent, interference was still found in the open ocean.
Researchers at the German Aerospace Center (DLR) are still analyzing the vast amount of GNSS disruption data collected during the year-long project. Two papers have already been published about this project, and more are on the way, according to principle researcher Emilio Pérez Marcos.
In a paper presented at the Institute of Navigation last year, Marcos and his co-authors outlined the results of the last five months of this unique sampling experiment. Detection equipment was mounted on a large Hapag-Lloyd container ship. The antenna was mounted about 50 meters above the water line and provided a line-of-sight of 25km or more. The L1/E1 and L5/E5a frequency bands were continuously monitored. In addition to a “Snapshot” recording device used to save raw data samples (time snapshots), a more resilient DLR multi-antenna receiver was used to assess the impact of interferences in beamforming array GNSS receivers (semi-resilient).
As might be expected, the most interference was detected in busy port areas. Less interference was experienced while transiting along coasts. While it was the least frequent, interference was still detected during open ocean transits.
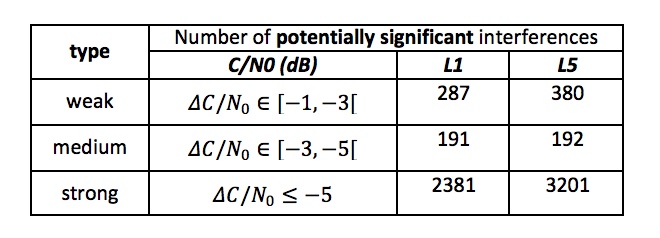
Table: Emilio Pérez Marcos and co-authors
Of the 39,045 snapshots recorded, 6,632 contained radio frequency interference at 1dB or higher. Separate tests have shown that many single antenna GNSS receivers begin to perform poorly with interference signals greater than 1dB. The other 32,413 snapshots could represent interference signals that may have come from weaker transmitters, sources more distant from the ship, been the result of adjacent band transmissions, or other phenomena.
Three particularly strong and persistent interference incidents were noted in the paper.
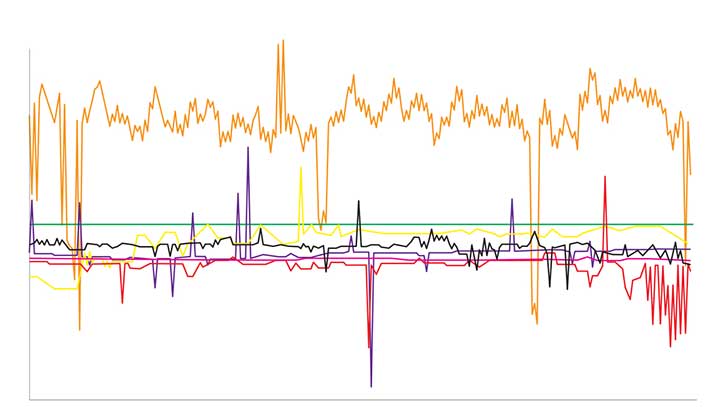
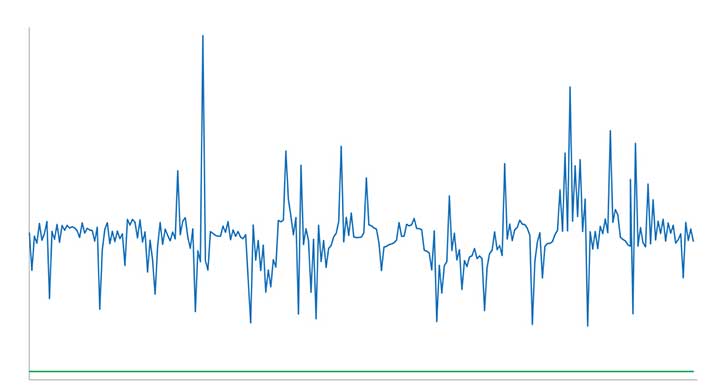
The first was detected when the vessel was transiting the Suez Canal northbound. The interference lasted around five hours and 60km. At several points the interference prevented the DLR semi-resilient GNSS receiver from working properly, which would mean that any single antenna GNSS receiver would cease to function completely.
Vessel going north in Suez Canal. RFI detectable during approx. 60 km. Inset: Eigenvalues during the 5 hours that the RFI was detectable. (Graphic: Emilio Pérez Marcos)
The second caused the DLR receiver to fail when the vessel was entering Jebel Ali, the port of Dubai in the United Arab Emirates. The DLR receiver provided some resilience thanks to its beamforming capabilities; again any other receiver would have suffered the interference effects earlier being unable to provide any PVT. The receiver did not return to proper operation for 11 days and 5,000km. The reason for this is uncertain and under investigation.
Particularly strong interference (45dB) caused the third incident and resulted in the DLR receiver failing for three days. It began when the ship was entered the highly trafficked Malacca Straits.
The equipment used also allowed researchers to determine direction of arrival for the interfering signals and to evaluate whether the interference was a spoofing signal.
For the reported strong interference events, DLR consulted the captain of the ship, who attested and confirmed the loss of PVT in the ship’s own GNSS receiver, with all the consequences that this implies for the systems that rely on it.
The paper, “Interference and Spoofing Detection for GNSS Maritime Applications,” was presented at the ION GNSS+ conference in Miami in September of 2018. It described the last phase of a yearlong measurement effort aboard the ship by DLR. An earlier phase of the campaign has also been published in E. P. Marcos et al., “Interference awareness and characterization for GNSS maritime applications,” 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, 2018.
The authors are preparing additional papers to describe more of the results from the larger project.
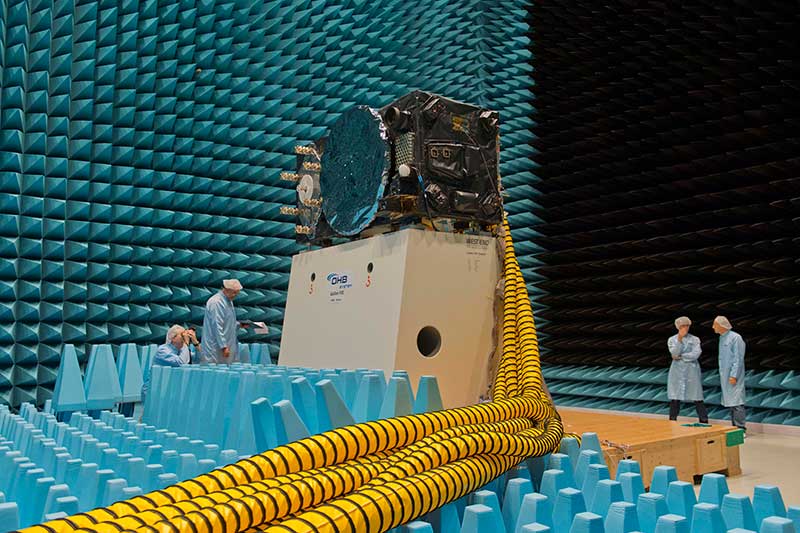
Inside the ESTEC Test Center, Galileo’s First Operational Capability first flight model, FM1, prepares for passive intermodulation testing in the Maxwell electromagnetic facility. (Photo: ESA-Anneke Le Floc’h)
Gazing through soaring plexiglass walls at the space simulation room of the European Space Agency’s Test Center in the Netherlands affords a glimpse into scientific history.
I felt a frisson, a highly regimented frisson if you will, of vicarious thrill for the rigors, rhythms and methods of research and testing as I toured the center after giving a keynote at the agency’s Navigation Days. Here, the final birthing touches were administered to transmitters beaming forth the Second Golden Age of satellite-based navigation.
One can debate which constellation combination will prove most fruitful to users: GPS plus GLONASS, GPS plus BeiDou, GPS plus Galileo (note the common term). I believe it will be the last, because of the close synergy and symbiosis of the two commercial arenas, North America and Europe.
All Galileo Full Operational Capability (FOC) satellites had their mettle and metals probed, radiated, bombarded, shaken and shocked here before they journeyed to space. The test center’s role is to verify, intensively and for months per satellite, that it can perform well for the whole of its planned lifetime.
A mass property test checks that the center of gravity and mass are aligned within design specifications, so that the satellite’s orientation can be accurately and economically controlled with thruster firings in orbit, prolonging work life by conserving propellant.
A five-week thermal-vacuum test runs inside a 4.5-meter diameter stainless steel vacuum chamber, the Phenix. An inner thermal tent heats to simulate solar radiation and cools with liquid nitrogen to create the chill of sunless space.
In the Maxwell test chamber, spiky radio-absorbent anechoic walls test electromagnetic compatibility to ensure that all systems operate together without interference. Noise horns generate more than 140 decibels to simulate a violent launch. A quad shaker table vibrates the satellite up, sideways and down, as accelerometers search for hazardous internal vibration, gathering data across hundreds of channels.
Altogether a severe trial, a crucible from which the FOC satellites emerge certified and ready for space.
Oh, that we humans were similarly tested before placement in positions of power.
Skyhook is partnering with Rivetz to integrate Skyhook’s global mobile location services to enhance the Rivetz platform.
Skyhook is the operator of a worldwide independent location services platform. The company’s technology provides the foundation for mobile location services in the global market for connected devices.
Skyhook’s hybrid positioning system locates devices using observed radio signals — including GNSS, Wi-Fi and cellular — ensuring that all devices can be located in all environments.
By enabling Skyhook’s advanced location capabilities on the Rivetz Network of cybersecurity tools, Rivetz users can take advantage of location service protection in any signal environment, regardless of GPS availability.
Accurate and accessible device location services are a critical component of all end-to-end security solutions, particularly in regulated environments or other markets where trusted and verifiable location is a requirement.
“We are pleased to partner and collaborate with Rivetz, a trusted leader in decentralized mobile security,” said Kipp Jones, Chief Technology Evangelist of Skyhook. “We share the values that our products must be built on the pillars of trust and respect for individual privacy. We look forward to providing Skyhook’s industry-leading location services to the Rivetz Network.”
“We are proud to join forces with Skyhook to enable powerful location services to the Rivetz Network,” said Steven Sprague, co-founder and CEO of Rivetz. “A simple and safe security model is our greatest priority, and precise device location is a cornerstone of protecting our cybersecurity solutions.”
Rivetz’s security solutions hinge upon access to the Trusted Execution Environment (TEE), which is an isolated, measured computer environment separate from the operating system. By provisioning all digital transactions through the TEE, Rivetz assures that users’ private keys cannot be altered or stolen if the operating system were tampered with or infected by malware.
By Daniela E. Sánchez, Harvey C. Gómez and Thomas Pany, Institute of Space Technology and Space Applications (ISTA)
This paper presents how our system, consisting of a GNSS receiver antenna, an inertial measurement unit (IMU) and a lidar, is used to obtain high-precision maps through the geo-referencing of lidar point clouds. An accuracy assessment of the system is conducted, which also gives us insights on the quality of lidar range measurements for autonomous driving applications.
The assessment is done by geo-referencing the obtained point clouds of extracted buildings and comparing them against a supporting measuring system like a total station. The building extraction is done by performing an approximation of the mathematical model of a plane to the facades that composes the building in both, the lidar and the supporting measurement system data.
The paper also indicates the proposed pose determination method of a mobile agent using lidar data. Thanks to the advantages of active, 3D sensors, diverse objects in the environment can be detected as individual point sets, or clusters. Each of the segmented objects can be used as a landmark to figure how the agent is located with respect to those structural elements. The algorithm is capable of detecting the clusters in one point cloud, and finding the most alike point set on a subsequent scan. This is achieved by comparing global descriptors for point cloud data.
The Ensemble of Shape Functions (ESF) is selected as the cluster descriptor. The cluster matching is performed by comparing the clusters one-to-one, calculating the minimum Chi-squared distance among their descriptors. The smaller this distance, the greater the probability of being the same cluster in distinct epochs.
Figure 2. Direct geo-referencing of lidar data at different times. (Image: Authors)
The resultant cluster correspondences for the whole point cloud allow finding the rigid transformation between the point clouds. An initial coarse alignment among the clouds based on the centroids of each matched cluster was performed, followed by a fine alignment in order to reduce errors by the use of the Iterative Closest Point (ICP) algorithm. This approach is valid for urban environments, or for those where many objects can be segmented as clusters.
Finally, a practical case is described in order to show how we plan to use the outcome of the highly precise geo-referenced point clouds and the pose estimation method using lidar.
PCTEL Inc. released at DistribuTECH a new dual-band 802.11ac/p MIMO antenna that helps boost data rates and reliability for utility networks, intelligent transportation systems and other industrial IoT (IIoT) applications, according to the company.
PCTEL’s Coach 4×4 Wi-Fi/DSRC GNSS multi-band antenna is designed for both mobile and fixed deployments, enabling smart grids, mobile workforce communications, and advanced automation technologies across a variety of industries.
The antenna also supports Dedicated Short Range Communications (DSRC), a common interoperable safety standard for vehicles.
“PCTEL’s latest antenna will enable the future of the IIoT,” said Rishi Bharadwaj, PCTEL COO. “For example, advanced smart grids utilizing Coach antennas could reduce outages and efficiently manage alternative energy sources.
“Coach antennas also provide mobile connectivity for applications such as DSRC, which has the potential to revolutionize road safety. Those are just some of the possibilities. PCTEL’s advanced RF design and environmental testing capabilities enable us to deliver superior 4×4 MIMO performance and exceptional durability for the most demanding applications,” added Bharadwaj.
This new low-profile antenna features four-port 2.4/5-GHz coverage along with PCTEL’s unique high rejection GPS/GLONASS technology for network timing and tracking, all in a single IP67-rated housing.
It supports a variety of wireless technologies, including broadband mesh networks, 802.11ac Wi-Fi and 802.11p DSRC Wireless Access in Vehicular Networks (WAVE) standards for direct vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications.
This is the latest in PCTEL’s Coach antenna series. Coach antennas have been deployed in a variety of mobile and IIoT applications around the world. Their UV-stable design facilitates maximum installation flexibility without antenna orientation restrictions, the company said.
PCTEL is displaying its Coach4x4 Wi-Fi/DSRC GNSS multi-band antenna Feb. 5-7 at DistribuTECH, booth 11750, in New Orleans. It is available now to order using part #GL4X4MIMO-SF.
The program is open to graduate students (with a first university degree), Ph.D. candidates, early-stage researchers and young professionals willing to broaden their knowledge. The 50 available seats will be given on a first-come, first-served basis.
The mission of the ESA-JRC International Summer School on GNSS is to provide the attendees with a comprehensive overview of satellite navigation. Extensive lab work will provide attendees with hands-on learning opportunities.
Topics covered include:
Basics of satellite navigation
Carrier-phase positioning
GNSS RF link performance
Ionospheric and tropospheric effects on GNSS
and more
The summer school’s objective is to provide attendees with a comprehensive overview on satellite navigation, starting from the GNSS system, its signals, the processing of the observations in a receiver and finally determining the position-navigation-time (PNT) solution.
Lectures on intellectual property rights (IPR) and patents, as well as on business aspects, will be given. The future of satellite systems will also be discussed.
The main emphasis will be on the development of a group project using innovative ideas and covering all aspects, from the initial concept, to a business plan, its technical realization and marketing of the product or service.
Internationally renowned scientists and specialists will give lectures as well as practical exercises and lab work.