Geneq Inc., a manufacturer and provider of GNSS receivers and positioning solutions to GIS professionals and surveyors, has launched its newly designed website. The website features new functionalities, better product viewing options, and improved product support options.
The completely redesigned website to support the company’s product and service improvement program, the company said. The new website will be regularly updated with news on SXblue products, product support, software updates, events and social media feeds. The company welcomes feedback from clients, distributors and partners.
Geneq Inc. has been developing and manufacturing professional GNSS receivers and software products for 15 years. Its SXblue brand has been sold around the world.
Cepton Technologies Inc., a provider of 3D lidar solutions for automotive, industrial, security and mapping applications, has unveiled its newest lidar scanner, the SORA-P60L.
Part of Cepton’s SORA family of lidar scanners, the new scanner is purpose-built to deliver long-range, high-resolution imaging for unmanned aerial vehicles (UAVs).
The SORA-P60L offers a 400-Hz frame rate, enabling drones to fly faster while maintaining high point-cloud density. With a 550-gram payload, the SORA-P60L prolongs UAV flight time allowing more ground to be covered in a single trip, the company said.
Cepton’s unique Micro-Motion Technology faces all lasers downward at all times, providing a dense, uniform point cloud that, in combination with the high scan rate, makes it suitable for fixed-wing and fast-moving rotary-wing UAVs.
“Cepton’s SORA-P60L leads the lidar industry with its best-in-class point cloud density that provides superior imaging for UAVs,” said Neil Huntingdon, Cepton’s VP of business development. “With the affordable price point, long-range capabilities and high frame rate of SORA-P60L, UAVs can capture data faster and build more accurate maps. SORA-P60L is our first product from the SORA family that we have unveiled this year. We see a lot of opportunities for this unique sensor in other markets and have a number of products in development that will be revealed later this year.”
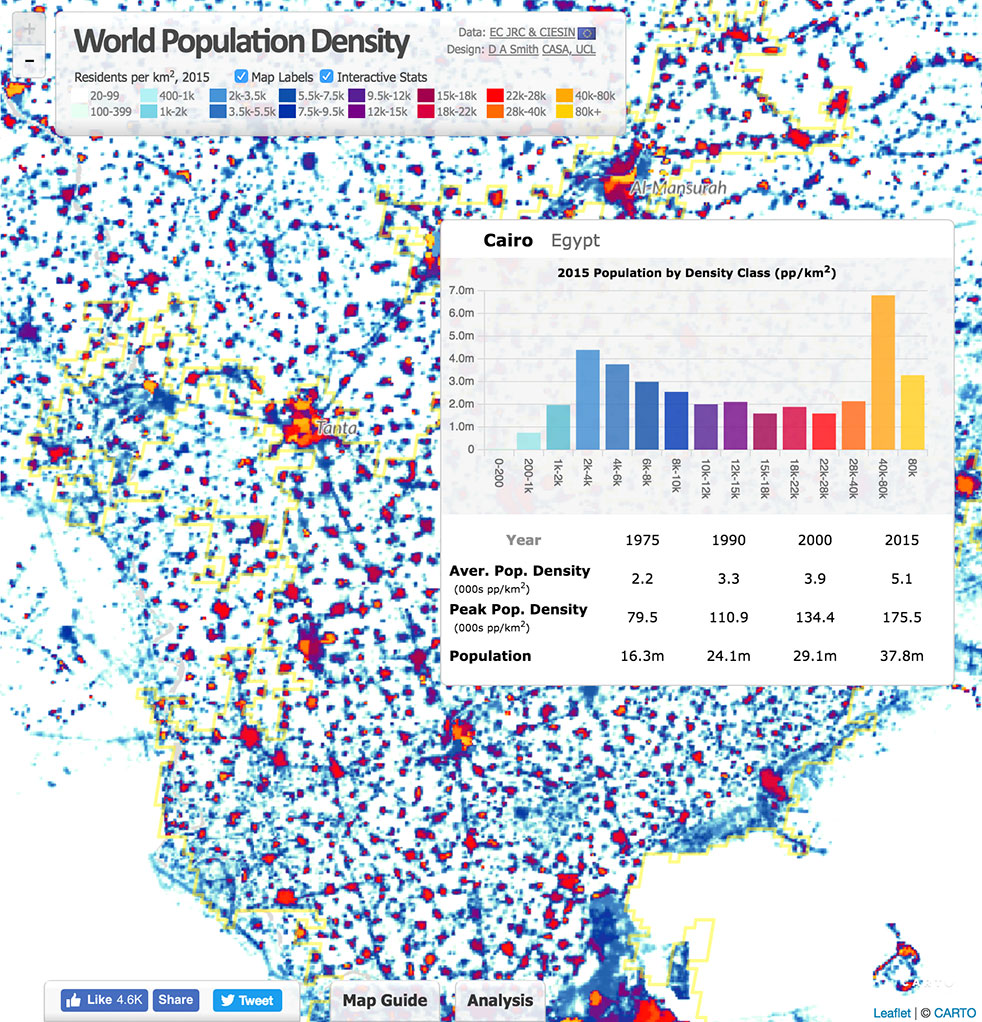
Since 1990, the urban population of Africa has doubled, with more than 80 percent of its denizens living in urban areas. Urbanization can contribute to sustainable growth, if managed well.
However, its speed and scale bring challenges, including meeting accelerated demand for affordable housing, transport systems, infrastructure, basic services and jobs.
Population data such as shown above is only a sample of the geospatial data available in Esri’s new Africa GeoPortal (www.africageoportal.com). The Esri-led initiative is a cloud-based platform that provides and receives geographic data and imagery from Esri and its partners.
The African Union, African Development Bank, other international agencies, nongovernmental organizations, academia, businesses and national government funds will be able to use the geoportal to address the most urgent development challenges facing the continent — including economic development, climate adaptation, conservation and health care.
The complimentary software-as-a-service geoportal is offered to anyone supporting African nations for positive economic, social and environmental outcomes — African citizens, NGOs and international development agencies. The geoportal offers access to spatial analytics capabilities and authoritative content for charting compelling, educational, informational, entertaining and beautiful maps of Africa.
The Global Human Settlement Layer from the European Commission’s Joint Research Centre (JRC) is a complete, consistent, global, free and open dataset on human settlements, and helps to quantify and understand the issues that drive urbanization. The above example comes from the JRC in its Esri story map “Building Knowledge for Sustainable Development in Africa,” which shows how the JRC contributes to the African Union (AU)-European Union (EU) partnership.
NovAtel’s Waypoint Products Group has released version 8.80 of its GNSS and GNSS+INS post-processing software products, including Inertial Explorer, Inertial Explorer Xpress, GrafNav and GrafNet. All Waypoint customers with an active subscription that are within the support period qualify for the Waypoint 8.80 upgrade at no additional charge.
Key features of the 8.80 release include:
High-rate precise satellite orbit and clock corrections available in minutes with the TerraStar-NRT option
Increased accuracy for pedestrian and vehicle applications by applying vehicle constraints using our SPAN intelligent vehicle dynamics modelling
Ability to use L5, E5a, B3 in differential solutions
14 percent faster processing with 64-bit support
For applications requiring highly accurate post-mission position, velocity or attitude, post-processing maximizes the accuracy of the solution by processing previously stored GNSS and inertial measurement unit (IMU) data forward and reverse in time, and combining the results. The position, velocity and attitude solution can be smoothed and output at the required data rate and in the coordinate frame required. This process also provides the ability to assess the solution reliability and accuracy.
The GrafNav and Inertial Explorer software packages are available as a digitally secured machine-portable license. The products are also available as a perpetual license or as a time-limited term license. A Software Development Kit (SDK) is available to allow developers to customize the entire processing workflow to suit their customers or application.
The Waypoint process:
Step 1: Capture raw GNSS and IMU data.
Step 2: Waypoint post-processing software maximizes the accuracy of the solution by independently processing data forward and reverse in time and combining the results.
Step 3: The position, velocity and attitude solution is smoothed to deliver an unparalleled level of accuracy. In-depth quality analysis tools verify the quality of the trajectory.
Step 4: Export your results at the required data rate and in the coordinate frame required.
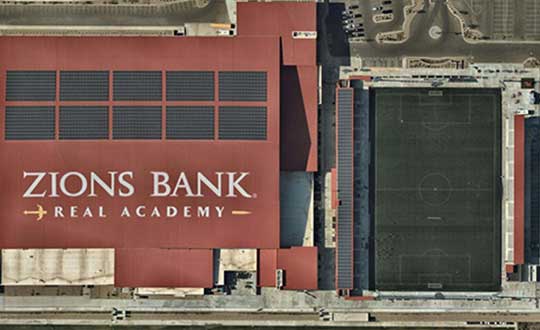
Check out a Nearmap high-resolution aerial image of Zions Bank Stadium/Real Academy. The solar was installed by Auric Solar. (Photo: Nearmap)
High-resolution aerial maps from NearMap are helping Auric Solar, a residential and commercial solar power provider, accelerate its initial site assessments, develop a more complete and accurate view of properties, and create winning proposals.
Auric accesses Nearmap imagery through the Aurora Solar platform, a solar sales and design software program. By utilizing Aurora software integrated with Nearmap imagery, Auric analysts have access to clear and current imagery. Headquartered in Salt Lake City, Utah, Auric services all of Utah, Idaho, Colorado and Oregon.
“Aurora’s responsive engineering interface coupled with Nearmap’s high-resolution captures allow us to use a combination of 3-D lidar models and 2-D high-resolution maps for complete accuracy in the planning and measuring stage of a project. This equips both the sales and analytics teams with accurate information to save time, money and serve the customer,” said Tyler Soukup, director of analytics at Auric Solar.
Analysts can make accurate measurements, run production numbers, identify roof obstructions and craft proposals all within the program. The sales team, analysts and installers are all on the same page, significantly reducing change orders.
The absolute horizontal accuracy of Nearmap’s georeferenced imagery is 0.75m (RMSE) or better. Measurements taken with Nearmap measurement tools are accurate to within 15cm for an individual photo. The company’s HyperCamera aerial photography system captures overlapping photographs along a flight path covering a survey area. Each photograph is tagged with its GPS location. Proprietary HyperVision technology then triangulates, orthorectifies and stitches these GPS-tagged photographs into a georeferenced photomap with an absolute horizontal accuracy of 0.75m (RMSE) and relative accuracy of 15cm. The process employs a combination of GPS positioning, high photo redundancy and triangulation of ground features to ensure this level of accuracy without the use of ground control points.
Solar panel installer Auric also has access to Nearmap historical imagery from years past, including leaf-on and leaf-off imagery, which presents the presence or lack of the foliage depending on the season. This greatly enhances shading analysis, making it easier to place the panels for maximum sun exposure. The company not only saves a significant amount of time with fewer onsite visits to qualify homes, but it also opens up more customers to solar.
“We’ve been able to qualify more customers than ever because of Nearmap’s clear, current captures. You really can’t accurately qualify a property without up-to-date imagery,” notes Soukup. “We quote projects from $20,000 to a few million dollars, and our proposals, plans and marketing materials should match that level of value. Nearmap helps us create a ‘wow’ factor.”
Before using Nearmap aerial imagery, Auric used using low-resolution satellite imagery to qualify properties. With outdated, blurry imagery, it was difficult to make accurate measurements and qualify a home before sending a technician for an on-site assessment.
By Daniela E. Sánchez, Harvey C. Gómez and Thomas Pany, Institute of Space Technology and Space Applications (ISTA)
This paper presents how our system, consisting of a GNSS receiver antenna, an inertial measurement unit (IMU) and a lidar, is used to obtain high-precision maps through the geo-referencing of lidar point clouds. An accuracy assessment of the system is conducted, which also gives us insights on the quality of lidar range measurements for autonomous driving applications.
The assessment is done by geo-referencing the obtained point clouds of extracted buildings and comparing them against a supporting measuring system like a total station. The building extraction is done by performing an approximation of the mathematical model of a plane to the facades that composes the building in both, the lidar and the supporting measurement system data.
The paper also indicates the proposed pose determination method of a mobile agent using lidar data. Thanks to the advantages of active, 3D sensors, diverse objects in the environment can be detected as individual point sets, or clusters. Each of the segmented objects can be used as a landmark to figure how the agent is located with respect to those structural elements. The algorithm is capable of detecting the clusters in one point cloud, and finding the most alike point set on a subsequent scan. This is achieved by comparing global descriptors for point cloud data.
The Ensemble of Shape Functions (ESF) is selected as the cluster descriptor. The cluster matching is performed by comparing the clusters one-to-one, calculating the minimum Chi-squared distance among their descriptors. The smaller this distance, the greater the probability of being the same cluster in distinct epochs.
Figure 2. Direct geo-referencing of lidar data at different times. (Image: Authors)
The resultant cluster correspondences for the whole point cloud allow finding the rigid transformation between the point clouds. An initial coarse alignment among the clouds based on the centroids of each matched cluster was performed, followed by a fine alignment in order to reduce errors by the use of the Iterative Closest Point (ICP) algorithm. This approach is valid for urban environments, or for those where many objects can be segmented as clusters.
Finally, a practical case is described in order to show how we plan to use the outcome of the highly precise geo-referenced point clouds and the pose estimation method using lidar.
A new map method opens up parking continuous-environment mapping for enhanced low-cost urban navigation. Collectively recorded context data by many identical platforms gather similar sensor readings when operating in a given area. Further processing integrates the data with a map and feeds the summarized results to a user.
ByIvan Smolyakov, Evgeny Klochikhin and Richard B. Langley
Complex, dynamic urban environments comprise millions of devices with localization capabilities. While GNSS remains a primary positioning tool, its performance is subject to significant degradation from blocked signals, multipath and non-line-of-sight (NLOS) signal reception. In aided navigation, a positioning filter with GNSS measurements integrates data from various sensors and correction streams to compensate for these disadvantages.
Low-cost platforms are limited with the variety and quality of sensors on board, as well as by processor performance and battery capacity. Positioning routines must be computationally light, energy efficient and make the most productive use of available data.
One new research area covers use of crowd-sourced GNSS data. Many vehicles now include some type of native wireless connection capability, which could be complemented by a designated third-party device.
The growth in connectivity brings an opportunity to access a stream of sensor data produced by a high number of devices operating in a localized urban area. Here, we explore the idea of creating a GNSS signal-strength map using the connected vehicle GNSS data stream and then use the map as statistical information for Kalman filter parameters tuning. This approach improves filter reaction to the environment and produces a positioning accuracy improvement.
SYSTEM ARCHITECTURE
C/N0 levels of reflected and diffracted signals are more likely to be lower than that of the LOS signals. We propose that the C/N0 level averaged during a given period among all satellites tracked in a given area would correlate with a higher probability of multipath-contaminated and NLOS signal reception.
A sufficient number of C/N0 readings associated with a given space-time cube should be collected to compute the statistics populating the signal-strength map. However, the city environment does not remain static: new construction occurs, traffic congestion shifts, and so on. Therefore, the C/N0 space-time statistics must be continuously updated in real time to reflect these changes. Additionally, the solution must be highly scalable as the market of connected vehicles is growing and so is the volume of the streamed data.
A recent advance in cloud-based data-stream processing, a data flow model treats an input data stream as something that will never become complete. A derivative of that model is Flink, an open-source framework capable of both unbounded data (stream) and bounded data (batch) processing, while treating bounded data as a special case of the streaming applications.
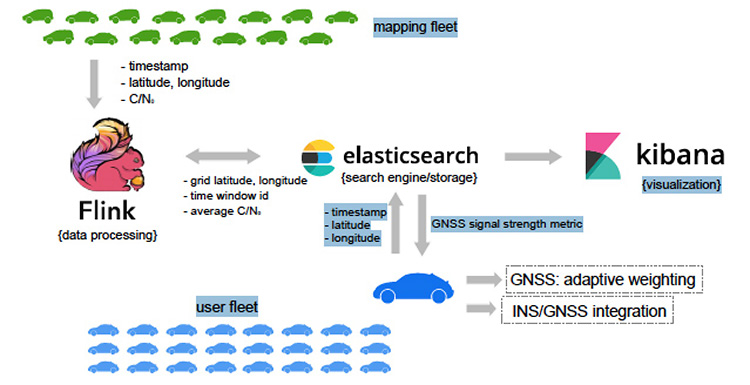
We use Flink as a core library for the environment mapping architecture as it fits the needs of event-time processing while being a highly scalable solution. The processing enables calculating necessary statistics based on a moment of time a reading occurred rather than based on a moment of time the reading arrived at the cluster. The proposed system architecture is presented in Figure 1.
The connected vehicle mapping fleet transmits packets of the GNSS receiver readings via cellular Internet connection to the server at 1 Hz. Each packet contains a timestamp in the UTC time system, the geographic coordinates determined by the proprietary positioning algorithms of a connected vehicle, and the C/N0 measurements per each tracked satellite.
The geospatial processing block calculates the average C/N0 metric among the readings of a given space-time cube. Computed statistics are sent to Elasticsearch, updating the map in real-time. Elasticsearch is an open-source, distributed search and analytics engine integrated with Kibana, an open-source data visualization tool. User platforms request the average C/N0 metric from the search engine with their UTC timestamp and coordinates and apply it in the processing filter.
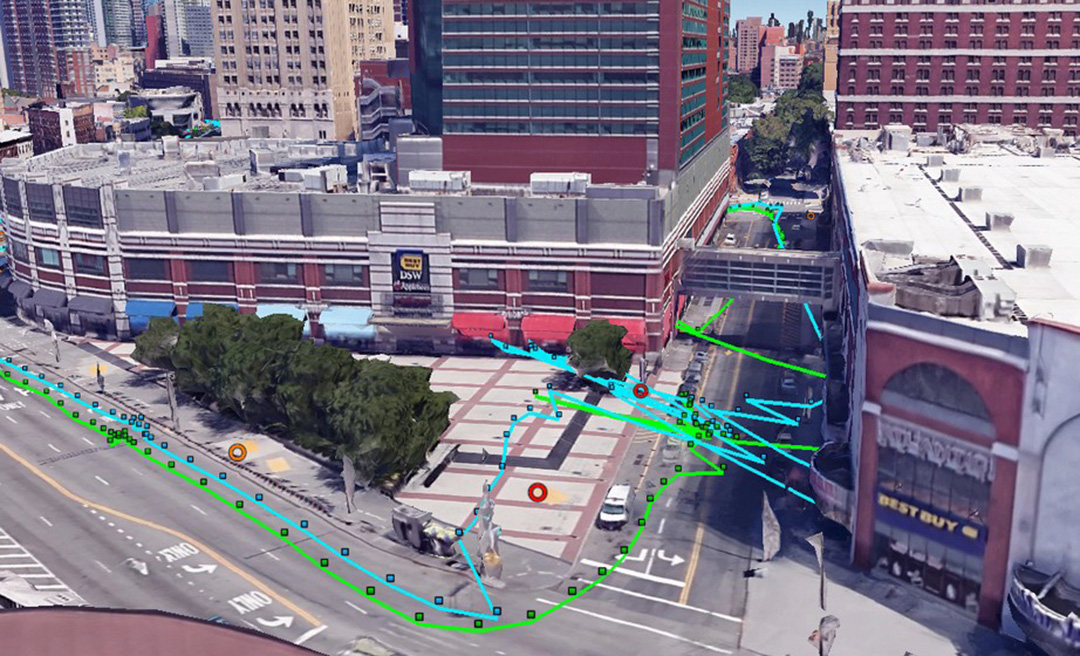
PILOT PROJECT
The system is currently in prototype. Collection of the data populating the map was performed with two positioning boards designed by Parkofon Inc. and installed on the dashboard of a vehicle (Figure 2).
Figure 2. Mapping setup: Parkofon board is installed on the dashboard of a vehicle. (Image: Authors)
Lack of a high number of vehicles for the data collection campaign was compensated with an extensive piloting time (17 hours, 43 minutes) in a limited area, driving the same roads repeatedly. Two areas of New York City were the subject of extensive mapping.
Tests concentrated on two sectors with different GNSS signal strengths: sector A, a relatively open-sky area; and sector B exhibiting deep urban canyon conditions. The mapped average C/N0 is denoted as .
The of the less obstructed sector A = 39.3 dB-Hz, while that of the more obstructed sector B is lower: 18.1 dB-Hz. This tendency is repeatable throughout the surveyed area and allows for further GNSS signal-strength map integration into the algorithms at the user side.
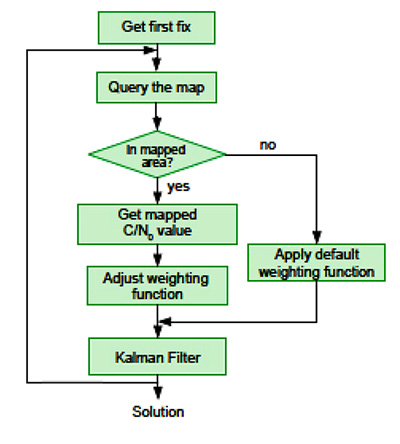
It is a challenge to find an optimal set of urban navigation filter parameters, as the signal obstruction environment changes significantly with the moving positioning platform. Our approach adjusts parameters of the GNSS observation weighting function with respect to the retrieved from the map. The algorithm scheme appears in Figure 3.
When the first position fix is obtained, the algorithm sends a request to the server with the timestamp and the coordinates determined at the previous epoch. If one is available in the current user area, the server response includes the metric retrieved from the GNSS signal-strength map. Next, the GNSS observation weighting function is adjusted according to equations given in the full technical paper (see Acknowledgment section).
PRACTICAL RESULTS
Algorithm performance was evaluated by analysis of the distances between the coordinates calculated with our engine and the centerline of the road in two downtown and two residential areas. For an estimated 86 percent of the track, our proposed map-aided weighting performed better than when the default weighting function was applied during the whole track.
The map-aided weighting of the observations brings approximately 25 percent and 35 percent accuracy improvement in the dense urban area and in the intermediate residential environment respectively. Additionally, there were instances of faster solution re-convergence when fix was lost due to insufficient number of the satellites tracked in narrow streets or under obstructions (see Figure 4).
Figure 4. Example of faster map-aided solution re-convergence. (Image: Authors)
FUTURE WORK
For the mapped average C/N0 levels to be unbiased, normalization procedures must be implemented. This would soften or eliminate hardware constraints on the mapping fleet and facilitate its growth. With more data available, the temporal discretization of the map needs to be implemented as satellite geometry and multipath environment change throughout the day.
Optimal dimensions of the mapped space-time cube remain an open question: more real-world data needs to be collected to provide better mathematically-derived estimations. We plan to investigate the benefits of a variable-dimension space-time cube with respect to the area and the mapping fleet density. We also plan to extend the environment map-aided filter tuning to a multi-constellation GNSS approach integrated with inertial navigation systems and other sensors.
The technique is commercially implemented in Parkofon, a fully automated parking payment and guidance system that helps people find cheaper, safer and easier parking. The platform includes a mobile app and device placed in the car to guide drivers to open parking spaces in real time and charge them only for actual time parked in designated garages. Parkofon also offers real-time on-street space availability.
Acknowledgments
This article draws on a paper presented at ION GNSS+ 2018. For the full paper, see www.ion.org/publications/browse.cfm. Research is supported by the Natural Sciences and Engineering Research Council of Canada.
MANUFACTURERS
Experimental datasets were collected with a Septentrio AsteRx-m2 receiver and Maxtena M1227HCT-A2-SMA antenna. Parkofon boards carry a u-blox M8N receiver module and a Taoglas CGGBP.25.4.A.02 patch antenna.
IVAN SMOLYAKOV is a Ph.D. student in the Department of Geodesy and Geomatics Engineering at the University of New Brunswick (UNB).
EVGENY KLOCHIKHIN is CEO of Parkofon Inc., a smart mobility company utilizing the Internet of Things to guide drivers to open parking. He holds a Ph.D. in Public Policy and Management from the Manchester Business School, UK.
RICHARD B. LANGLEY is a professor in the Department of Geodesy and Geomatics Engineering at UNB.
Researchers at the Massachusetts Institute of Technology (MIT) presented a project at the International Symposium on Experimental Robotics involving an autonomous drone fleet system that collaboratively mapped an environment under dense forest canopy.
Designed with search and rescue in mind, the drones used lidar, onboard computation and wireless communication, with no requirement for GPS positioning.
Each drone carries laser-range finders for position estimation, localization and path planning. As it flies, each drone creates its own 3-D map of the terrain. A ground station uses simultaneous localization and mapping (SLAM) technology to combine individual maps from multiple drones into a global 3-D map that can be monitored by operators.
The MIT team tested its concept via simulations of randomly generated forests, and world-tested two drones in a forested area at NASA’s Langley Research Center. In both experiments, each drone mapped a roughly 20-square-meter area in about two to five minutes, while the control system integrated their maps together in real-time.
The drones were programmed to identify multiple trees’ orientations, as recognizing individual trees in impossible for the technology, and individual trees’ orientation very difficult. When the lidar signal returns a cluster of trees, an algorithm calculates the angles and distances between trees to identify the cluster and determine if it has already been identified and mapped, or is a new mini-environment.
The technique also aids in merging maps from the separate drones. When two drones scan the same cluster of trees, the ground station merges the maps by calculating the relative transformation between the drones, and then fusing the individual maps to maintain consistent orientations.
CHC Navigation debuted its new Alpha3D mobile mapping solution at Intergeo 2018, which took place Oct. 16-18 in Frankfurt, Germany. Alpha3D combines a laser scanner, high-resolution HDR panoramic camera, GNSS receiver and high precision IMU.
A roundup of recent products in the GNSS and inertial positioning industry from the December 2018 issue of GPS World magazine.
OEM
Combination antenna
Long-range connectivity
Photo: Molex
The Molex highly compact 2.4/5-GHz combination GPS/Wi-Fi ceramic antenna is designed to be a cost-competitive solution covering the full GNSS band, 1.561 to 5.85 GHz. The triple-band ceramic antenna has Wi-Fi HaLow compatibility and is interference-resistant, supporting larger but lower (900-MHz) frequency ranges than 2.4/5-GHz connections. It also operates with lower power over longer ranges than 2.4/5-GHz Wi-Fi. Advanced Wi-Fi applications the internet of things, connected cars, smart homes and smart cities.
The MSB1054 multi-receiver module requires no external components, meeting needs of smartwatches, fitness trackers, logistics and navigation. Its Flash memory saves navigation data to optimize performance and provide a hot start. The ability to receive signals from several satellite systems significantly reduces the time to first fix. The module provides a built-in RF-front end (SAW filter, low-noise amplifier) as well as a temperature-compensated crystal oscillator (TCXO), so no external component is required other than an antenna. It measures 5.8 × 6.2 × 1 millimeters and uses 3.4 mA current in low-power mode, such as for tracking.
The GE310-GNSS is an internet of things (IoT) module with GSM/GPRS, multi-constellation satellite positioning and Bluetooth functionality in a 270-millimeter-squared form factor. It meets European demand for GSM/GPRS compact form factors and is part of Telit’s migration-support program that helps customers leverage 2G’s low cost and broad coverage while preparing for 4G and 5G. The GE310 enables OEMs and system integrators in asset management, utilities and telematics to meet the strong demand for low-cost, highly compact devices without tradeoffs in performance, reliability and functionality, particularly in regional markets such as Europe, where 2G is forecast to remain in strong growth in number of IoT connections for many years.
With multi-sensor fusion positioning and orientation
Photo: Unicore
The CLAP-B multi-GNSS/MEMS integrated inertial navigation board features a miniaturized high-performance inertial measurement unit (IMU) on a compact high-performance GNSS board. The high-accuracy GNSS positioning coupled with a high-precision gyro and accelerometer provides stable, continuous 3D position, velocity and attitude, as well as original acceleration and angular velocity measurements, even in GNSS-denied environments. CLAP (Concurrent Localization & Attitude Pilot) technology is a high-precision multi-sensor fusion positioning and orientation technology developed by Unicore. The board is compact, light weight and has low power consumption. It is designed for ease of integration and mass production, and is suitable for autonomous driving, smart surveying and UAVs.
The UNI-GR1 RTK GNSS receiver offers highly accurate heading and positioning output. It can be connected to any device through Wi-Fi, mobile data, radio, USB or serial cable. It simultaneously tracks GPS L1/L2/L5, GLONASS L1/L2, Galileo E1/E5a/E5b and Beidou B1/B2/B3 on 432 channels. The receiver has a built-in level, a LED ring driven by a nine-degrees-of-freedom inertial measurement unit. Users can configure numerous settings such as real-time kinematic, or begin surveying immediately with a smartphone or laptop.
Dynamic tilt functionality has been added to the Trimble SPS986 GNSS smart antenna. The dynamic tilt upgrade allows for faster data collection to enable construction surveyors to create larger digital terrain models faster and with improved accuracy. It can capture higher accuracy measurements on steeper slopes from a moving vehicle and more accurate volume measurements to save time and money on material planning. The dynamic tilt measurement mode also auto-measures antenna height. From inside the vehicle, contractors can set the height of the antenna and quickly interrogate surface models using the real-time 3D surface display in Trimble Siteworks field software.
The Skycatch Edge1 is an on-premise data processing and GNSS base station optimized for the Skycatch Explore1 and DJI Phantom 4 RTK drones. Field teams can fly a drone, process the data and receive centimeter-level data output in 30 minutes or less, directly to a tablet, without the need for internet or cellular connectivity. 2D maps and 3D point clouds can be shared from the tablet. The Edge1 includes built-in WiFi, LTE and reliable sub-5-centimeter accuracy, and delivers high-quality data output. It is also capable of running deep learning algorithms to extract more insights from collected data in near real time.
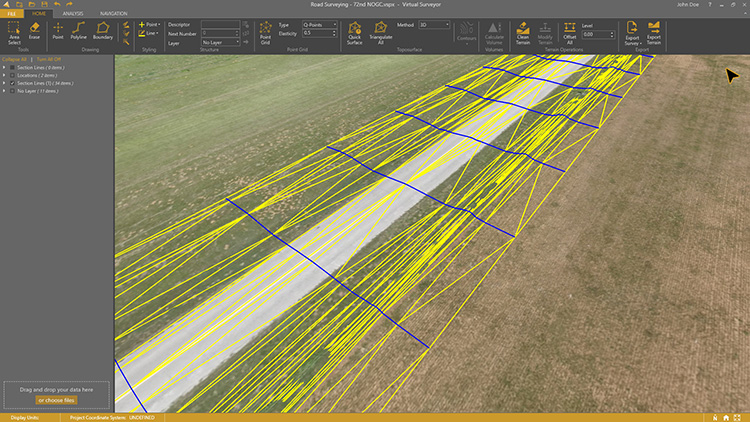
Drone surveying software Virtual Surveyor now eliminates the need for clients to use third-party applications to prepare data for processing. Version 6.1 handles on-the-fly projections that previously required a separate software package to set the data in the proper coordinate system. It bridges the gap between UAV photogrammetric processing applications and engineering computer-aided design (CAD) packages. The software generates an interactive onscreen environment with UAV orthophotos and digital surface models where the surveyor selects survey points and breaklines to define the topography, creating highly accurate topographic products for CAD input up to five times faster than otherwise possible. Surveyors can drag and drop all kinds of files into Virtual Surveyor: points, raster, vectors and point clouds. The point clouds are converted to a DSM for manipulation and processing, dramatically accelerating the time required to generate the CAD model.
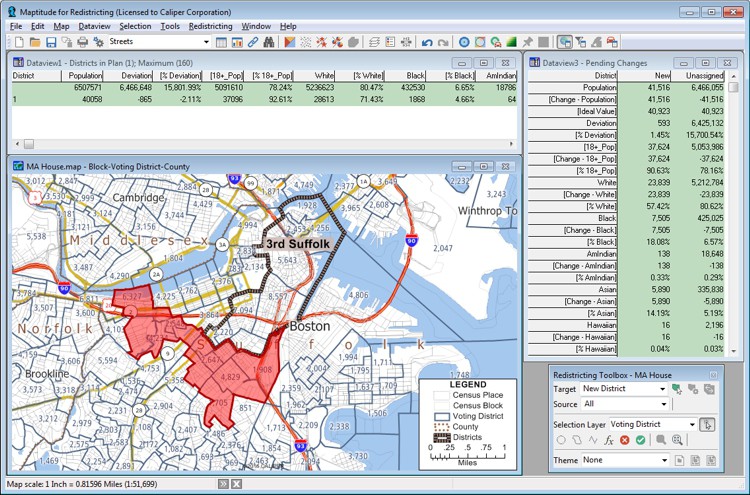
Includes Efficiency Gap Measure to explore redistricting problems
Screenshot: Mapitude
Maptitude for Redistricting is a professional tool for political redistricting. Maptitude provides measures and reports that support the creation of fair and balanced districts, and regularly enhances the software. Maptitude was used to democratize redistricting in California and is used by redistricters from independent commissions, non-profits, and civil rights groups, to the courts and political parties.
Stockpile measurements are up to 80% more accurate
Photo: DJI
The DJI Mavic 2 Pro drone is now part of the Kespry stockpile measurement solution for mining and aggregates companies. Kespry’s stockpile measurement solution produces data up to 80% more accurate than manual measurement. All of the survey data is stored in a central cloud application, accessible for analysis by the entire team. Large aggregates and mining companies can standardize and capture stockpile data across all their sites in the Kespry platform, while using Kespry 2s or DJI Mavic 2 Pro drones.
Designed for next-generation automotive applications
Image: Quectel
The automotive-grade C-V2X module AG15 features the Qualcomm 9150 C-V2X chipset paired with Quectel LTE module AG35. It is designed to meet the telematics and vehicle-to-everything (V2X) connectivity requirements of autonomous driving and road safety. It features a built-in multi-constellation high-precision GNSS (GPS/GLONASS/BeiDou/Galileo/QZSS) receiver with additional support from satellite-based augmentation systems (SBAS) and Qualcomm 3D dead-reckoning technology, which improves positioning accuracy and speed while simplifying customer designs. It is designed to allow low-latency, highly reliable and highly dense data exchange between vehicles and their surroundings, enabling effective information sharing among road users to avoid collisions, thus improving automotive safety, automated driving and traffic efficiency.
The SPC58 Chorus H microcontroller (MCU) line can run multiple applications concurrently to allow more flexible and cost-effective vehicle electronics architectures. The line is designed for high-end body, networking and security applications such as gateways, body-control modules, battery management and ADAS safety systems. The line has three high-performance processor cores, more than 1.2-MB RAM and powerful on-chip peripherals. The MCU securely delivers updates over the air for vehicle powertrain, body, chassis and infotainment features. With high security and large on-chip code storage, ST’s Chorus automotive microcontroller is a gateway/domain-controller chip capable of handling major OTA updates securely. Two independent Ethernet ports provide high-speed connectivity between multiple Chorus chips throughout the vehicle and enable responsive in-vehicle diagnostics.
The VBOX 3i RTK is a real-time-kinematic-enabled version of the VBOX 3i dual antenna that can be used in conjunction with an RTK differential base station to obtain ±2-centimeter positional accuracy in real time at 100 Hz. The data logger combines the advantages of a twin antenna GPS setup with GLONASS satellite tracking. It can be used in vehicle tests where positional accuracy and repeatability are of key importance, such as lane departure testing, distance to a fixed object or precise mapping. The VBOX 3i RTK comes with the VBOX manager, a display enabling users to change dynamic modes and filter settings, set up slip angle data and define antenna locations.
The StarLink TrackerWi‑Fi advanced vehicle-tracking device combines u-blox GNSS, 4G and Wi-Fi technology, eliminating the need to equip vehicles with a separate mobile Wi‑Fi hotspot. StartLink is suitable for applications for connected cars, telematics, vehicle diagnostics, fleet management, vehicle security, usage-based insurance, and rental and leasing service companies. With the Wi‑Fi hotspot, users can tap into cellular 4G to transfer telematics data to the fleet manager and send real-time data to the driver’s smart device or infotainment system.
The Notilo Plus team with the iBubble. (Photo: Notilo Plus)
Notilo Plus has launched iBubble, a fully wireless, autonomous and intelligent underwater drone that can be used for search-and-rescue operations, naval or underwater infrastructure maintenance, and subsea patroling. iBubble can accompany divers for up to an hour and down to 197 feet depth, enabling superior underwater imaging. The remotely operated vehicle (ROV) was designed using a patented underwater localization technology, which is mainly based on acoustic signal transmission and image recognition (video tracking). By combining these technologies, iBubble is able to locate precisely its target underwater and shoot stable footage. The iBubble is equipped with an obstacle avoidance system, real-time image recognition, a stabilization system and direct surface control.
Anafi Work is an ultra compact tool for professionals, helping them make informed decisions using the drone’s aerial insights. Anafi Work includes the advanced Anafi drone equipped with an innovative imaging system, a 4K/21MP camera with a 180° vertical orientation, allowing users to capture images of inaccessible areas.The drone operates for 1 hour and 40 minutes with its 4 USB-C smart batteries. It can be transported anywhere in a compact shoulder bag. Professionals can create 3D models of buildings, quickly and easily, using a one-year subscription to Pix4Dmodel.
The Riegl VQ-480 II and VQ-580 II are designed for airborne applications at mid-altitudes for use on both manned and unmanned aircraft. The new Mark 2 designs of previous models improve both performance and user-friendliness. Both offer a measurement rate of up to 1,250,000 measurements/second and a 75-degree field of view of suitable for corridor mapping, city modeling and applications in agriculture and forestry. Weighing approximately 10kg, they are ready for integration into helicopters and unmanned UAVs with a higher payload capacity. The VQ-480 II and VQ-580 II are prepared for smooth GNSS/IMU integration, offer interfaces for up to five optional cameras, and are have built-in and removable storage.The VQ-480 II works at a laser wavelength of 1550 nm; the VQ-580 II at the1064 nm wavelength suited to measure on ice and snow.
DroneNode is a portable, compact and inconspicuous counter-drone jamming device that law enforcement can use at large outdoor events without raising public concern (it is not yet authorized for use in the U.S.) It can simultaneously jam 2.4 GHz, 5.8 GHz and GNSS L1 and L2 bands up to one kilometer, causing drones to return to their point of origin or land. It is also effective against swarm attacks. Emergency broadcasts, cellphone communication and other dedicated channels are unaffected.
Skydio R1 users now have the ability to follow cars. New modes include Car Follow, improved Lead Mode, and other improvements throughout the system, which is built on top of the Skydio Autonomy Engine. The engine operates 13 cameras, enabling it to map and understand the world in real time, allowing it to be fully autonomous and independently capture video footage. Its Nvidia Jetsonl AI runs neural networks that trained for the Car Follow feature on datasets of automobile images.
The Z+F Profiler is the latest addition to Lidar USA’s HiWay Mapper series. Photo: Lidar USA
Lidar USA has integrated Z+F scanners for mobile mapping into its product line.
According to the company, the Z+F Profiler is a high-speed, 360-degree scanner that provides more than 1 million points per second at up to 200 profiles per second with a range of nearly 120 meters. This product is the latest addition to the company’s HiWay Mapper series.
The company also integrated the Z+F Imager, which can be transformed into a mobile system to maximize the use of the scanner. This allows companies to provide mobile mapping services with the highest accuracy — at a reduced cost — while maintaining backward compatibility for static scanning, the company said.
Lidar USA, also known as Fagerman Technologies and based in Huntsville, Alabama, specializes in laser scanning, photogrammetry, instrumentation and geomatics.
Z+F USA, Inc. is the United States subsidiary of Z+F GmbH Germany. It manufactures high quality control equipment, wire ferrules and laser scanners.
The Advanced Rapid Imaging and Analysis (ARIA) team at NASA’s Jet Propulsion Laboratory in Pasadena has produced a map showing the damage caused by the Camp Fire in Northern California.
After two and a half weeks of historic destruction, the fire is now 100 percent contained. Teams continue to search the destruction — including the destroyed town of Paradise — for remains. As of Sunday, the death toll is 85, making it California’s deadliest fire.
The map shows the damage as of Nov. 16.
Credits: NASA/JPL-Caltech
The map was developed using synthetic aperture radar images from the Copernicus Sentinel-1 satellites operated by the European Space Agency.
The map covers an area of 48 miles by 48 miles (78 by 77 kilometers), outlined in red on left. A closeup view of damage to the town of Paradise is inset on right, outlined in white. The color variation from yellow to red indicates increasingly more significant changes in the ground surface.
The ARIA team creates its maps by comparing before-and-after satellite images of the fire region to see the extent of change between the two images. For this map, they compared the data for the image to a Cal Fire map for preliminary validation.
Although the maps may be less reliable over vegetated terrain, such as forests, they can help officials and first responders identify heavily damaged areas and allocate resources as needed.
Sentinel-1 data were accessed through the Copernicus Open Access Hub. The image contains modified Copernicus Sentinel data (2018), processed by ESA and analyzed by the NASA-JPL/Caltech ARIA team.