LabSat has expanded its GNSS signal record, replay and simulation portfolio with the introduction of three new LabSat 4 variants: LabSat 4, LabSat 4 Core and LabSat 4 Lite. LabSat seeks to provide engineers and developers with scalable solutions tailored to a wide range of testing requirements and budgets.
LabSat 4 delivers advanced capabilities, including up to 12-bit I&Q quantization and support for recording and replaying external data such as CAN-FD, RS232, and digital inputs. This model is designed for demanding GNSS signal testing, offering high precision and extensive customization to address complex modern testing scenarios.
LabSat 4 Core offers the same features as the original LabSat 4, except it is limited to a maximum of 4-bit I&Q quantization. This makes it a cost-effective choice for applications where the highest signal capture resolution is not necessary, while still providing a comprehensive feature set.
LabSat 4 Lite is optimized for affordability, featuring streamlined 2-bit I&Q quantization and omitting external data recording and replay. It is well-suited for production line testing and other scenarios where quantization depth is not a critical factor.
All LabSat 4 variants include three RF channels with selectable bandwidths up to 60 MHz, adjustable quantization options depending on the model, manual gain control, multi-unit synchronization, and full backward compatibility with LabSat 3 Wideband file formats. The series is compact, portable, and designed for efficient use in both field and laboratory environments.
A key benefit of the LabSat 4 range is the ability to upgrade between models via a license file, allowing users to start with LabSat 4 Lite and move to Core or the full LabSat 4 as their testing needs evolve, without replacing hardware. Customers can also select between Replay-Only and Record-and-Replay configurations across all variants.
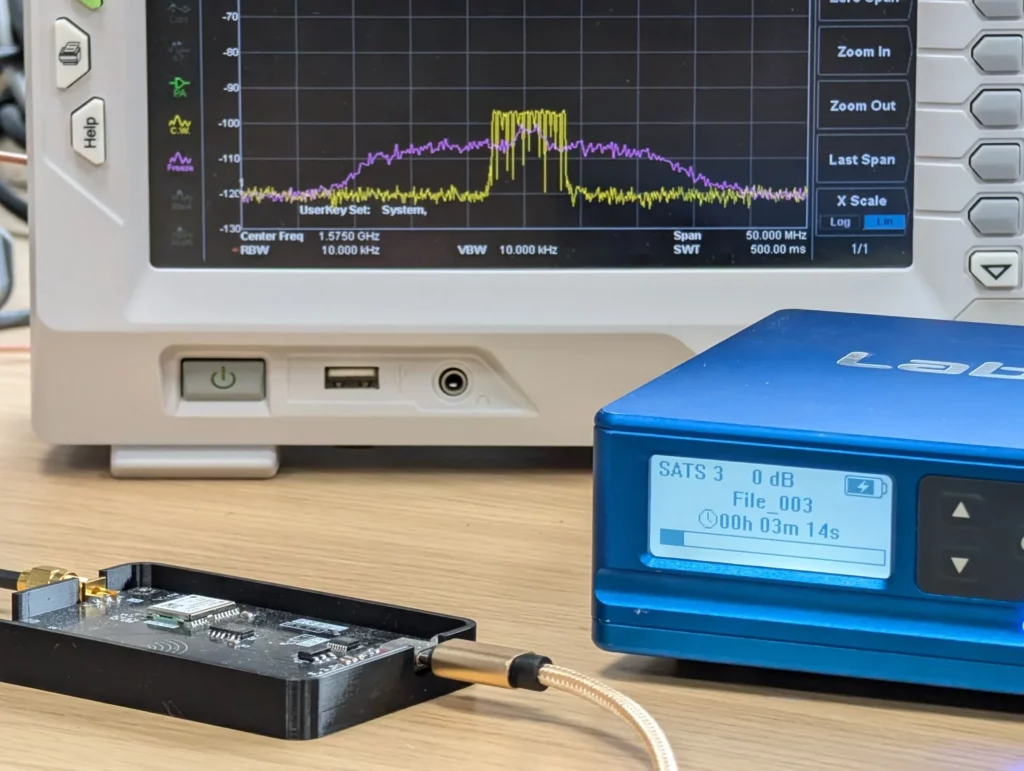
Labsat has released updates from Jammertest 2024, where the team addressed real-world challenges related to GNSS jamming and spoofing attacks. According to Labsat, the team was on-site with the Labsat 4 GNSS Record & Replay device, which effectively captured the entire GNSS RF environment during the tests. The team shared that this technology has allowed Labsat to collect more than 20 TB of data, enabling them to reproduce complex signals under laboratory conditions.
Labsat recorded GNSS signals at 12 bits of I&Q resolution across multiple frequency bands to accurately capture the RF conditions. With this data, LabSat 4 users can recreate these signals on their test benches, allowing them to evaluate their GNSS receiver performance against the same challenges encountered during the event.
Labsat said it plans to make these recordings available to its LabSat 4 users, allowing them to experience a full range of jamming and spoofing scenarios firsthand. This offers GNSS engineers a unique chance to prepare their technology for real-world threats.
Labsat 4 GNSS Record & Replay device. (Photo: Labsat)
[SPONSORED CONTENT] LabSat has announced the launch of the LabSat 4 GNSS Simulator, a cutting-edge solution for modern GNSS signal testing. With three configurable RF channels, up to 12-bit I&Q quantization, and variable 10-60 MHz bandwidth, it offers exceptional customization and precision. Synchronized record and replay of external data sources such as CAN FD and RS232 further enhance complex test scenarios.
LabSat 4 has been engineered to deliver ease of use, with saveable custom record settings and a web-based interface for effortless configuration. Its impressive file management capabilities, featuring 7.6TB internal storage and fast data transfer via Gigabit Ethernet and USB 3.0, meet high-volume data demands efficiently. Maintaining the compact size, portability, and cost efficiency of its predecessors, LabSat 4 is ideal for use both in the field and laboratory. Additionally, it integrates seamlessly with SatGen Simulation Software, enabling the creation of detailed GNSS RF I&Q scenario files based on custom trajectories, enhancing its utility for sophisticated GNSS signal testing.
GPS World Editor-in-Chief, Matteo Luccio, met with Elijah Owens, technical sales engineer, Racelogic, to highlight the company’s new Labstat 4 technology and more from ION GNSS+ 2023.
An exclusive interview with Julian Thomas, managing director, Racelogic. For more exclusive interviews from this cover story, click here.
In which markets and/or applications do you specialize?
We originally designed our LabSat simulator for ourselves, because we supply GPS equipment to the automotive market. Then, we decided to sell it into that market, which is our primary market, for other people to use. That’s where we started, but it has moved on since then. We supply many of the automotive companies who use it for testing their in-car GPS-based navigation systems.
However, we’ve moved on to our second biggest market, which is the companies that make deployment systems for internet satellites, which use it for end-of-life testing. Several of our customers use it. That’s because we do space simulations, so we can simulate the orbits of satellites. That’s very useful when they’re developing their satellites.
We supply many of the major GPS board manufacturers — such as NovAtel, Garmin, and Trimble — when they’re developing their boards and testing their devices. We supply many of the phone companies — such as Apple and Samsung — and many of the GPS chip manufacturers — such as Qualcomm, Broadcom, and Unicom. More or less any company that’s into GNSS.
How has the need for simulation changed in the past five years, with the completion of the BeiDou and Galileo GNSS constellations, the rise in jamming and spoofing threats, the sharp increase in corrections services, and the advent of new LEO-based PNT services?
It all started off very simple, with just GPS, which was one signal and one frequency. We got that up and working very well and it helped us a lot. Then we got into this market. In the last few years, we’ve had to suddenly invent 15 new signals. We do two systems, really: one is a record-and-replay system. You put a box in a car, on a bike, in a backpack, or on a rocket, and you record the raw GPS signals; then you can replay those on the bench. That requires greater bandwidth, greater bit depth, smaller size, battery power, all of that.
The other is pure signal simulation. We simulate the signals coming from the satellites from pure principles. So, we’ve had to dive into how those signals are structured, reproduce them mathematically, and then incorporate that in into our software. That’s been 15 times the original work we thought it would be, but as we add each signal it tends to get a bit simpler until they add new ways to encode signals, and then it gets complex again. We’ve had to increase our bandwidth, increase our bit depth for the recording to cover all of these new signals.
Because our systems record and replay, they’re used a lot to record real-world jamming. In many scenarios, our customers will take one of our boxes into the field and record either deliberate jamming or jamming that’s been carried out by a third party. Then they can replay that in the comfort of their lab.
With regards to spoofing, we’ve just improved our signal simulation. So, we can completely synchronize it with real time. We can do seamless takeover of a GNSS signal in real time. We can reproduce the current ephemeris and almanac. If we transmit a sufficiently powerful signal, we can completely take over that device. Then we can insert a new trajectory into it. That’s a very recent update we’ve done.
If the complexity and amount of your work has gone up so much in the last few years but you cannot increase your prices at the same rate, what does that do to your business model?
It’s the same people that produce the signals in the first place, so they still have a job. However, as we add more signals and capabilities, we tend to get more customers as well.
Oh, so, you’re expanding your market!
Right, right.
Regarding some of the new PNT services being developed, how do you simulate them realistically without the benefit of recordings of live sky signals?
It is all pure signals simulation. You go through the ICD line-by-line and work out the new schemes. Here’s an interesting anecdote. Our developer who does a lot of the signal development is Polish and is also fluent in Russian. When we were developing the GLONASS signals, he was working from the English version of the GLONASS ICD. He said that it didn’t make any sense. So, he looked at the Russian version and discovered that the English one had a typo. When he used the Russian version, everything worked perfectly. He told this to his contacts at GLONASS and they thanked him and updated the English translation of their document. So, you are very, very much reliant on every single word in that ICD.
Are there typically differences between the published ICD and the actual signal?
No, no. Apart from the Russian one, which had a typo, they’re very good. For example, we’ve recently implemented the latest GPS L1C signal. My developer spent six months recreating it and getting all the maths right and the only way you could test it was to connect it to a receiver and hit “go.” It just worked the first time. He almost fell off his chair. The ICD in that case was very, very accurate.
Hope that Xona’s ICD is just as good.
Yeah.
Are accuracy requirements for simulation increasing, to enable emerging applications?
Yes, absolutely. No one can have too much accuracy. Everyone’s chasing the goal of getting smaller, faster, and more accurate systems. They want greater precision and better accuracy from their simulators, as well as a faster response. We do real-time simulators and they want a smaller and smaller delay from when you input the trajectory to when you get the output. Luckily for us, Moore’s law is still in effect, so, as the complexity of the signals and the accuracy requirements increase, computers can churn through more data. Luckily, we’re able to keep up on the hardware side as well, because much of our processing is done using software. Some companies do it in hardware and some companies do it in software. We concentrate on the software side of things.
Here’s another interesting anecdote from my Polish guy. He noticed that the latest Intel chips contain an instruction that multiplies and divides at the same time but that it wasn’t available in Windows. So, he put in a request with Microsoft for that operational code and they incorporated it into the very latest version of dotnet, which has improved our simulation time by 7%. I see little improvements like that all the time.
Are all your simulators for use in the lab or are some for use in the field? If the latter, for what applications and how do they differ from the ones in the lab? (Well, for starters, I assume that they are smaller, lighter, and less power-hungry…)
All our systems are designed to be used inside and outside the lab. They can all be carried in a backpack, on a push bike, in a car. We do that deliberately, because we come from the automotive side of things, so we have to keep everything very small and compact.
Besides automotive, what are some field uses?
Some of our customers have put them in rockets, recording the signal as it goes up, or in boats. We have people walking around with an antenna on their wrist connected to one of our systems, so that they can simulate smartwatches. There are many portable applications. We have a very small battery-powered version, which makes it very independent.
Are there any recent success stories that you are at liberty to discuss?
Our most exciting one is a seamless transition for simulation that we developed to replace or augment GPS in tunnels. We’ve been talking to many cities around the world that are building new tunnels. Because modern cars automatically call emergency services when they crash or deploy their airbags, they need to know where they are, of course. Cities need to take this into account when they are building new tunnels, which can pass over each other or match the routes of surface streets. Therefore, accurate 3D positioning in the tunnels has become essential. It requires installing repeaters every 30 meters along each tunnel and software that runs on a server and seamlessly updates your position every 30 meters. As you enter a tunnel, your phone or car navigation system instantly switches to this system. It’s been received very well because it’s mainly software and the hardware is pretty simple. We’ve brought the cost down to a fifth of the cost of standard GPS simulators for tunnels. So, we’re talking to several cities about some very long tunnels, which is very exciting.
Image: Safran Federal Systems (formerly Orolia Defense & Security)
As the number of constellations, satellites, and signals has grown in recent years — especially in the past few years, with the completion of the BeiDou and Galileo constellations — simulator manufacturers have been challenged to keep up. Threats of jamming and spoofing also increased. Then, a few companies began to develop new positioning, navigation and timing (PNT) constellations in low-Earth orbit (LEO).
Due to the limited space available in print, I was able to use only used a small portion of the interviews I conducted for our August cover story. For full transcripts of them see below:
Full interview with Tim Erbes, Technical Director, Safran Federal Systems (formerly Orolia Defense & Security).
Full interview with JulianThomas, Managing Director, Racelogic.
Full interview with Jürgen Pielmeier, Managing Director, IFEN.
Full interview with Mark Holbrow, VP of Product Development, Spirent Communications and Roger Hart, Sr. Director of Engineering, Spirent Federal Systems.
Spirent’s GSS6450 record and playback system (RPS) used to record live-sky signals in an urban environment for testing in the lab.(Image: Spirent Federal Systems)
These are interesting and challenging times for the makers of GNSS signal simulators.
For decades, developers and manufacturers of GNSS receivers have needed to simulate the satellites’ signals to test receivers in their labs and in the field. Meanwhile, users of GNSS receivers for critical missions — such as military operations and rocket launches — have needed to simulate the exact conditions (the number of satellites in line of sight, the positional dilution of precision, etc.) at specific points in time and space.
As the number of constellations, satellites and signals grew — especially in the past few years, with the completion of the BeiDou and Galileo constellations — simulator manufacturers were challenged to keep up. Threats of jamming and spoofing also increased. Then, a few companies began to develop new positioning, navigation and timing (PNT) constellations in low-Earth orbit (LEO). Now, it is common for simulators to require several hundred channels.
I discussed these challenges and the prospect for the simulation industry with representatives of five companies:
Tim Erbes, Technical Director, Safran Federal Systems (formerly Orolia Defense & Security
For the full transcripts of my interviews, click here. If you like this article, you will love the interview transcripts, which cover much more than I had room for here.
Legacy Constellations and New Ones
Simulator manufacturers cite a variety of challenges. According to Erbes, a big one is determining users’ requirements. “Often,” he said, “they can’t determine what the specs need to be. All they know is that they need it to work.” This is particularly true when mixing and matching receivers, IMUs, and components from different manufacturers, he pointed out.
For decades, there were only two GNSS constellations (GPS and GLONASS). A couple of years ago, two more came online (BeiDou and Galileo). Meanwhile, several regional augmentation systems were developed (SBAS, EGNOS, NavIC, QZSS and KASS), some of which may later grow into global systems. Now, new LEO-based systems are being developed. For simulator manufacturers, what was once clear “began to get fuzzy,” Erbes said. “If you ask members of our team right now how many constellations we support, you will not get a quick answer. We’re trying to be forward-looking and add everything that might be up there so lab users can develop and test.”
Multi-constellation simulation is a particularly challenging problem for groups that don’t have simulators, Erbes pointed out. “We have the advantage of having a software-defined architecture. We designed the software so that it is easy to add new constellations to it. Basically, once we’re given a proper interface control document (ICD), we’re only a couple of months away from a first draft implementation of that new signal. Then we iterate.”
In the past few years, said Thomas, Racelogic “had to suddenly invent 15 new signals.” It makes a record-and-replay system — “You put a box in a car, on a bike, in a backpack, or on a rocket, and you record the raw GPS signals,” Thomas said — and another system in which it simulates the satellites’ signals “from pure principles.” The latter, he noted, has been “15 times the original work we thought it would be. However, as we add each signal it tends to get a bit simpler until they add new ways to encode signals, and then it gets complex again.”
Spirent Communications’ technology, Holbrow said, focuses around “its dedicated SDR hardware platform and software simulation engine, which provide performance, scalability and flexibility, within an open accessible architecture. Close collaboration with our selected partners ensures the opportunity to support and integrate new and emerging PNT technologies through their tools, applications and hardware.” Two other aspects that have continued to grow in importance have been “increased realism and test automation,” Holbrow said. “Both are areas in which Spirent continues to prioritize and invest R&D dollars.”
Spirent “can enable the user with effectively an arbitrary waveform simulator or ‘sandbox’ to experiment with different modulation schemes, different chipping rates, codes, bandwidths and navigation data content,” Holbrow said. “The increasing number of signals that we can support multiplies the permutations and combinations of test cases that users can do,” Hart added.
Not every simulator user is equally interested in simulating all the existing and emerging constellations. Those in the U.S. military market do not use foreign signals, pointed out Clark. However, they may want to understand how those signals could impact their vehicle, platform, or individual receiver.
LEO-based constellations “have become a buzzword in the last year or so,” Clark said. Because CAST Navigation’s simulators are modular and use an FPGA-based design, “we can add different satellite constellations or satellite protocols to our system,” he said. “However, we don’t offer anything commercially yet due to a lack of an official ICD, or any kind of documentation that defines any of these new LEO-based signals.”
Today, said Pielmeier, all high-end RF simulators must support “all existing GNSS systems with all related signal components on all frequencies.” Additionally, to remain competitive, they must be kept “up-to-date with the new and continuously evolving GNSS signals.” He added: “Beyond the L-band signals, we are also fully supporting the S-band signals of the NavIC constellation.”
The increased request for precise point positioning (PPP) corrections service, Pielmeier pointed out, was the driver for IFEN to add the High Accuracy Service (HAS) PPP-correction capability on Galileo’s E6-B signal to its next release. “We expect further improvements here during the next few years, especially to cover the emerging needs of the PPP-RTK market.” The advent of LEO-based PNT services, he said, makes this “the most important driver for the next five years, extending the signal frequencies beyond the current L- and S-band signals, seeing new modulations, two-way transfer and many more topics.”
Jamming and Spoofing
Concern about jamming and spoofing has increased significantly over the past several years. These, however, are not new concepts for simulator manufacturers. “In a way, simulation is ahead of this state of the world,” said Erbes. “Spoofing is similar to simulation. So, we already know how to do that.” That could change, however. “If new requirements come up, such as higher data rates or wider bandwidth waveforms or different types of waveforms, then we would have to adapt and add support for that kind of stuff.”
“Because our systems record and replay, they’re used a lot to record real-world jamming,” said Thomas. Regarding spoofing, Racelogic has just improved its signal simulation. “We can do seamless takeover of a GNSS signal in real time. We can reproduce the current ephemeris and almanac. If we transmit a sufficiently powerful signal, we can completely take over that device.”
Over the past five years, most of CAST Navigation’s customers have become much more interested in being able to simulate jamming and spoofing, Clark said. “If you’re doing anything of any importance in a contested environment, you’re going to come up against some type of spoofing and/or jamming interference.”
Pielmeier agreed that simulation of jamming and spoofing threats has been a major market driver in recent years. “Our latest RF simulator generation, NCS NOVA+,” he said, “fully supports all types of jamming and spoofing and is fully integrated into our RF simulators to enable coherent signal generation. With the coming safety-of-life and automated driving applications based on DFMC (SBAS/GBAS dual-frequency multi-constellation), the need to support advanced jamming and spoofing simulation solutions will remain a continuous driver.”
IFEN’s rf signal generator technology, based on a modular and highly flexible Software Defined Radio (SDR) platform. (Image: IFEN)
Simulating What Does Not Yet Exist
The current GNSS constellations broadcast signals that can be recorded, played back, and used to generate accurate simulations. For systems still being developed, however, simulator manufacturers must rely on each system’s ICD, if and when it is available. Even for established systems, the live sky signals may diverge from the ICD. “Is the simulator supposed to match live sky,” Erbes wondered, “or is it supposed to match the intended final state of the constellation, according to the ICD? This is a huge topic for M-code, which is ever changing, and has a very large ICD that is released incrementally. We’re constantly having to make changes to the simulator to match those releases.”
A big challenge for simulator manufacturers is to keep pace with new and evolving ICDs. “There are more constellations than ever, and the technology makes it easier to change signal architectures,” said Erbes. “We’re going to start talking about signals that can be reprogrammed on the fly. That’s going to make simulation more and more challenging.”
Simulating signals for new systems that are not yet deployed is a matter of “pure signals simulation,” said Thomas. “You go through the ICD line-by-line and work out the new schemes. You are very much reliant on every single word in that ICD.”
New LEO-based systems are not the only ones to present this challenge to simulator manufacturers. “L1C is another one of those problem child signals that we have developed,” said Clark. “All we can do is buy all the makes and models of L1C receivers available for sale and utilize our simulator, along with those receivers, to see whether things are good. We’ve asked the government for an L1C code sample, but it will not be available until the satellite manufacturers launch the satellites in their final configuration. Until then, we’ll develop to the ICD that’s been released and defined, then cross our fingers.”
Spirent’s core simulation engine and SDR “are agnostic of the constellation and signal type that’s being generated,” Holbrow said. “So, the underlying principles of accuracy, range rate, pseudo-range control, and delay, together with the RF fidelity from Spirent’s SDR+ Sim engine, can be readily manipulated to simulate the wealth of emerging signals, including LEO.” Additionally, when an ICD is not available, the company can enable its customers to use its tools “to readily populate elements of that ICD themselves.”
In the Lab vs. In the Field
“All our systems can be carried in a backpack, on a push bike, in a car,” said Thomas. “We do that deliberately, because we come from the automotive side of things, so we have to keep everything very small and compact. Some of our customers have put them in rockets, recording the signal as it goes up, or in boats. We have people walking around with an antenna on their wrist connected to one of our systems, so that they can simulate smartwatches.”
CAST Navigation has simulator packages that range “anywhere from shoebox size to nine-foot-tall racks,” said Clark. “They are all modular, so you can add options and capabilities over time. We have simulators that are used in the field. Some of the testing groups with the U.S. armed forces have used our simulators in the back of a Humvee along with other proprietary equipment to conduct their own field experiments.”
Spirent supports in-the-field use cases: its portable simulator can test PNT resilience while the DUT is receiving live-sky signals, and their record-and-playback system takes real-world soundings in a wideband RF environment for playback in the lab.
Currently, Pielmeier said, all IFEN simulators are designed for lab use. However, “we recognize an increased request for field-capable RF simulators, specifically to perform spoofing of real SIS to test deployed GNSS receivers in the field. Offering a portable in-field solution is in our mid-term planning, but not a current driver for our developments.”
Testing vs. Mission Planning
How do simulators used by receiver manufacturers in their labs and in the field to tweak existing receivers or develop new ones differ from those used for mission planning? “In most lab simulations, they can just run with a default constellation for a given day,” Erbes explained. “They’ll run that scenario hundreds or thousands of times and never need to change it because they’re testing parts of the receiver that don’t care a whole lot about the specifics of what’s happening.”
Missions, by contrast, are time- and location-specific. Planners need to know which satellites will be overhead at an exact time and place. “When you’re doing real day mission planning, the big problem isn’t so much how to generate a signal, it’s how to find out what’s happening today.”
Increasing Accuracy Requirements
Like those for receivers, accuracy requirements for simulators are increasing to match those of emerging applications. “Everyone’s chasing the goal of getting smaller, faster, and more accurate systems,” said Thomas. “We do real-time simulators, and they want a smaller and smaller delay from when you input the trajectory to when you get the output. Luckily, we’re able to keep up on the hardware side as well, because much of our processing is done using software.”
As accuracy requirements rise, “Real-world testing has an incredibly important role to play,” said Holbrow. Additionally, as resilience testing places increasing demands on test equipment, Spirent Communications now supports “a multitude of vulnerability and corresponding mitigation/prevention test cases” to deal with jamming, spoofing, cyber-attack and CRPA
CAST Navigation’s simulators meet or exceed accuracy requirements, Clark said. “We have pseudo-range accuracy down to a millimeter, our phase coherence doesn’t wander, and we’re able to achieve 2.5 ps to 3 ps synchronization coherence during multi-element, phased-array antenna simulations. We see our customers interested in a higher performing simulator, and that is our commitment.”
Pielmeier had a different perspective on this: “We saw no increase in the required accuracy, as the typical requested accuracies are far beyond the real accuracy of the signals anyway.”
Recent Success Stories
Racelogic has developed a system to replace or augment GPS in tunnels, which often pass over each other or match the routes of surface streets. “We’ve been talking to many cities around the world that are building new tunnels,” said Thomas. “It requires installing repeaters every 30 meters along each tunnel and software that runs on a server and seamlessly updates your position every 30 meters.”
Clark pointed out that CAST Navigation’s “bread-and-butter” for the past few years has been “larger systems that can drive phased array antennas, along with inertial units, and full high-dynamic aircraft, in real-time environments.” He added that “the smaller systems, which used to be popular, have mostly gone by the wayside.”
As a recent success, Holbrow cited Spirent Communications’ release of a Xona simulator, in partnership with Xona Space Systems, as well as the addition of “many realism-related capabilities, including simulating the vibration and temperature effects of inertial systems;” a cloud-based software application called Foresight that enables users to understand the GNSS coverage they would expect at a particular time, location and trajectory based upon accurate 3D scenes; and a simulation test solution for the Galileo Open Service Navigation Message Authentication (OSNMA) mechanism. Finally, he stressed Spirent’s increasing support for automation.
Pielmeier cited the Galileo second generation Test User Receiver contract that IFEN received from the European Space Agency as its most important recent success. “Within this contract, the NCS NOVA+ simulator as RF test tool will be upgraded to full G2G signal generation capability. The new already implemented G2G signals enable shorter time to first fix (TTFF) and improved acquisition performance but also higher updates rates (e.g., for PPP-RTK). Through the end of the year, the G2G signal will be fully implemented in our RF simulator, including the next generation of advanced authentication solutions.”
An off-the-shelf PC provides the computing power for complex GNSS driving simulations. (Photo: Racelogic)
By Julian Thomas Managing Director, Racelogic
Driving simulators are commonly used by vehicle manufacturers to expedite the test and development process of their many electronic systems. This not only saves the considerable time and expense of using a real car on a test track, but it is, of course, significantly more environmentally friendly.
LabSat simulators are used by many leading technology companies and car manufacturers to develop and verify the performance of their new products containing GNSS receivers. These tests are performed using either a pre-recorded or an artificially generated RF signal. This RF signal contains the combination of multiple satellite signals, which are decoded by the GNSS engine, tracking the artificial satellites as though they were real. Static or moving scenarios can be generated, and the user can select parameters to suit their own application, such as time, date and available constellations.
Julian Thomas Managing Director Racelogic
Recently, an automotive LabSat customer had a specific requirement to synchronize a GNSS receiver with the real-time trajectory data generated by one of their driving simulators. This was for a hardware-in-the-loop test rig where a human driver would navigate a route around a virtual test track, while the normal electronic systems reacted as if the vehicle were being driven around a real environment.
The challenge in this customer’s application was that the time delay between the trajectory coming from the simulator and the generation of the corresponding GNSS signals had to be less than 100 ms. This low latency was necessary to achieve realistic synchronization between the driver’s inputs and the resulting output from the GNSS-based device under test.
Traditionally, low-latency real-time simulators use bulky expensive hardware that relies on power-hungry field programmable gate arrays (FPGAs) to create the necessary satellite signals. However, due to the inevitable tick of Moore’s Law, and with some clever optimizations, your entry-level desktop PC now packs more than enough punch to simulate multiple constellations and signals with very low latency.
Using a standard PC to do the heavy lifting means that the hardware required to output the simulated signal is much easier to obtain, can be a lot simpler, and is considerably more cost effective. For example, an 8-core, 3-Ghz Intel i7 processor can generate the signals from 20 satellites in real-time, which normally is sufficient to simulate all but the most complex scenarios.
Our LabSat SatGen software has been continuously developed and optimized during the past 15 years, so it did not take us long to enable the reception of an NMEA trajectory stream with a latency of less than 100 ms. We then streamed this simulated data via USB to our LabSat Real-Time, which generated a corresponding RF signal that can be connected directly to the RF input of any modern GNSS engine.
Using a PC to generate the signals does not mean a loss of fidelity, with the resulting output achieving a repeatable position of less than 10 cm, while the trajectory data can be received at up to 100 Hz.
The resulting solution can take trajectory data from any kind of simulator that has an API to obtain real-time data, such as many popular off-the-shelf driving and flight software simulators, and use this to provide a real-time signal that can be utilized by the GNSS device under test.
Our future development roadmap includes synthesizing external signals, such as CAN-based sensors or inertial measurement units, and then synchronizing these signals with the incoming trajectory. With the amazing power of a modern PC, we are finding that this kind of complex simulation is now much more cost effective and easier to achieve.
[SPONSORED CONTENT] VBOX NTRIP Modem allows you to receive RTK correction data via internet, without having to operate your own base station. By accessing public or commercial RTK networks, correction messages from a grid of permanent base stations can be received by either Wi-Fi or 4G cellular connection. Utilizing Network RTK overcomes the range restrictions of a single base station, allowing for centimeter-level RTK accuracy to be achieved over significant distances. Additionally, receiving corrections via internet rather than radio provides a more reliable signal reception as interference from changes in elevation or topographical obstacles are minimized.
If your use of RTK corrections is localized, then you can still gain the benefits of increased range and signal reliability offered by utilizing internet-based correction messages. Simply connect your base station to a computer with internet access and cast the correction messages from your base station directly to the VBOX NTRIP Modem.
Simulator vendors explain their evolution in response to changes in GNSS/PNT, comment on technical challenges they face, and outline principal markets.
GNSS receivers — which were never as simple as FM radio receivers or garage door remote controls — are becoming increasingly complex. The causes for this include continuing efforts to:
reduce their size, weight, and power (SWAP)
utilize new signals from up to four GNSS constellations
integrate them with other sensors, such as inertial measurement units (IMUs), cameras, and lidars
take advantage of a growing number of public and private, global, regional, and local correction services
meet the requirements of booming new markets, such as autonomous vehicles
mitigate the threats posed by the proliferation of unintentional and intentional RF interference, the latter better known as jamming, and by spoofing.
In short, receiver manufacturers must constantly adapt to a GNSS/PNT landscape that is, as one of the respondents to this Q&A put it, “ever evolving.”
In turn, the growing complexity of GNSS receivers requires increasingly sophisticated simulators to test receivers and their integrations in controlled conditions before field testing and deployment. Increasingly, this is achieved by replacing with software what was once done in hardware. Simulation remains a vital, though often underappreciated, segment of our industry.
On the following pages, five simulator vendors briefly explain their evolution in response to changes in GNSS/PNT, comment on the principal technical challenges they face, and outline their principal markets.
Spirent Federal Systems’ GSS6450 RF record and playback GNSS simulator is portable, for testing automotive applications in the field. (Photo: Spirent Federal)
Lisa Perdue Product Line Director, Simulation Orolia
OROLIA
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
We have transitioned away from the GNSS simulator approach of using fixed, allocated hardware that we used in our early simulators to the more modern software-defined approach we use today. Given the ever-evolving PNT landscape, it is difficult to design hardware that will support all future GNSS and PNT simulation needs. Instead, we focus on the development of the Skydel software platform, which can then be used with the supported COTS hardware or turnkey system to generate the necessary signals. This gives us the benefit of maximum scalability and flexibility while being truly future proof.
The software-defined approach also allows us to offer Skydel in new and exciting ways. We aim to make PNT simulation accessible to everyone and we can do that through subscription and cloud-based simulation services.
What are currently the greatest technical challenges to GNSS/PNT simulation?
Today GNSS is only a part of the PNT picture. GNSS receivers are often tightly integrated with other sensors and many times the GNSS receiver cannot be isolated to test it on its own. Other sensors must also be stimulated or simulated and included as part of testing. Correction services are becoming more common, but many are proprietary with no public specification. With no common standards available, it can be technically challenging to create a one-size-fits-all test solution.
We tackle these challenges through our plug-in feature. The plug-in architecture allows you to expand the capabilities of Skydel by adding your own features or complex integration with other systems. It allows you to exchange information with the Skydel Engine and even integrates it into the Skydel UI. With our open-source SDK, which includes example plug-ins, you can create your data outputs synchronized to the GNSS simulation, such as IMU or correction services data.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
At Orolia, we say ‘Skydel Everywhere.’ Skydel is used in applications ranging from military encrypted receiver testing (SAASM, M-Code, PRS) to commercial applications supporting any of the GNSS signals available.
Skydel is used in systems that are found in labs, but you can also find Skydel at an individual engineer’s desk, or even home offices. In the field, Skydel has provided simulation and threat generation capability to authorized test ranges and field test events.
The broadsim software-defined GNSS is powered by Orolia’s Skydel GNSS simulator engine. (Photo: Orolia)
RACELOGIC
Julian Thomas Managing Director Racelogic
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Over the years, GNSS technology has changed significantly but our approach of identifying a need and creating a solution hasn’t changed since we launched our first LabSat GNSS simulator. We created LabSat because we needed a cost-effective, accurate and easy to use record and replay simulator that we could use for product development and production line testing for our VBOX Automotive and VBOX Motorsport technologies. This need could not be met by any other simulator manufacturer, so we developed our own solution, which in turn became LabSat. Although our approach has not changed, the needs of users, including our own engineers, have, so we continue to develop and improve LabSat to meet these needs.
With the increasing number of satellite launches in market segments such as communication and navigation, the number of requests for testing space-qualified receivers has increased dramatically. To test these kinds of scenarios, we have been making some major upgrades to simulate rocket launches and Earth orbit trajectories that require very different characteristics from land-based simulation.
As the number of constellations and signals has expanded very rapidly, the number of simultaneous signals that need to be simulated has put a far greater requirement on the computing power needed to render them. We have been working very hard on optimizing our routines to make the most of the new breed of high-performance multi-core processors. The result has been a big decrease in the time taken to create a scenario, and an increase in the number of signals that can be simulated in real-time.
What are currently the greatest technical challenges to GNSS/PNT simulation?
The biggest challenge is in simulating a large number of constellations and signals in real-time without using dedicated, expensive hardware to create them. The good news is that with the latest Intel Xeon processors boasting up to 40 cores and 80 threads, a much larger number of signals can now be created in real-time using off-the-shelf PC components.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
With the global pandemic causing national lockdowns, many engineers switched to working from home. Our largest growth in the simulator market has therefore been due to providing these engineers with a small, low cost, easy to use simulator that they can have on their desks at home, allowing them to continue to develop GNSS applications without having to go into the office. The markets these engineers work within are as varied as the markets that use GNSS technology.
We have also seen a big increase in the use of our simulators to test mass produced satellites used in providing global internet coverage. These satellites are being produced in large volumes, and the need for a low cost, reliable testing method on the production line has driven strong growth in this area.
Our simulators are often used in the field to gather data for in-lab testing, as small size and battery life are very important factors in this environment.
SPIRENT FEDERAL SYSTEMS
Phillip Bonilla Senior Systems Engineer
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Spirent has provided highly accurate simulation solutions since the early phases of GPS availability, starting with defined hardware for each signal type. As the GNSS landscape has grown, Spirent has worked closely with leading developers, adding key flexibility and functionality to adapt and provide a growing product portfolio. By adopting a robustly defined system architecture, and employing signal-agnostic hardware, Spirent simulators can generate any of the available constellations and frequencies, with no more than a few clicks of a mouse.
While broadening the support for the increasing number of constellations has been a focus, so too has the necessity to provide users with high numbers of available channels and auxiliary simulation needs. To complement GNSS simulation, significant effort is being devoted to resilient application testing, providing users with flexible solutions for introducing jamming and spoofing to the test environment. Our agnostic hardware supports signal generation using software defined radio (SDR), including interference sources and user-defined IQ signal data. As customer demands have grown, alternative RF and PNT sensors have been—and continue to be—incorporated, allowing users an expanded and comprehensive test environment.
The new spirent simulator generates alternative RF navigation signals concurrently with GNSS signals. (Photo: Spirent Federal)
What are currently the greatest technical challenges to GNSS/PNT simulation?
Today, nearly all industries rely on GNSS or other PNT sources to some extent. With such varied and widespread use, laboratory testing is critical, and maintaining the highest levels of accuracy, reliability and robustness remains one of the greatest challenges. For modern hardware-in-the-loop configurations, simulation systems must be able to keep latency consistent to enable powerful post-processing of results. With this challenge in mind, we at Spirent design and manufacture our own hardware, ensuring precision and ultra-low latency.
Another significant test challenge posed by modern applications is the growth in vehicle speed and maneuverability. Creating a truly realistic test environment for supersonic and even hypersonic vehicles with high rates of spin and jerk places huge demands on a simulator. Spirent recently has introduced the industry’s first 2 kHz update rate, enabling the most accurate trajectories for the most mobile technologies.
Lastly, positioning engines are becoming more complex. In addition to GNSS and inertial, vision systems and a range of other sensors and signals-of-opportunity are providing developers greater opportunity for precision and robustness. Therefore, a core part of Spirent’s mission statement is delivering test equipment that is designed to be integrated into wider test benches and ensuring that equipment is always orders of magnitude more accurate than any device under test.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Spirent simulators are used in all phases of the product life cycle across nearly all applications. Receiver manufacturers use our solutions beginning with initial research and development, throughout product development, and well into production and field testing. Along with the ability to use Spirent’s simulators for live range testing, Spirent’s GSS6450 record and playback system enables users to record the real world in high dynamic detail for repeatable lab testing.
JACKSON LABS
Gregor Said Jackson President and CTO
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Initially, we saw a large demand for GPS-only solutions. We are shipping units into this market and it is growing more than 30% year over year for us. Recently, customers are looking to also supporting other constellations. There is an emerging market for LEO simulation capability. Many LEO constellations are becoming reality, such as OneWeb, Kuiper, Starlink, Iridium, Xona, and others, and customers are more frequently asking if we can support these types of signals in our simulators. Demand also is arising for additional base-band signals to accommodate the RF signals, such as synchronized raw IMU data and other observables. Jamming and spoofing signals also are being requested and reproducing these as faithfully as possible is a big challenge for synthesized simulation. Lastly, we see demand rising for mil-type secure applications, such as M-Code, PRS (Galileo) and P(Y) code SAASM of course. The complexity of future simulators will rise in lockstep with the complexity of the RF spectrum coming to us from space.
What are currently the greatest technical challenges to GNSS/PNT simulation?
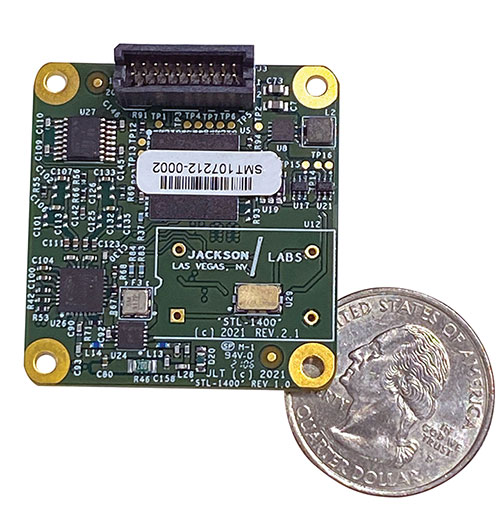
The STL-1400 positioning and timing receiver is designed for battery-operated low SWaP-C applications. (Photo: Jackson Labs)
A faithful reproduction of the real live-sky RF signals would rank high on this list. There are almost an unlimited number of out-of-band and in-band benign and adversary RF signals on a typical GNSS antenna these days, and more recently the sun has been acting up with solar flare activity that can disrupt GNSS signals. As GNSS receivers mature and become capable of tracking four, five or more carrier frequencies and constellations at once it becomes increasingly challenging to supply these types of signals from a simulator, and at a reasonable price-point. Sometimes, a wideband recording and playback system can do a better job at reproducing live-sky signals, however these systems are limited to playing back the same exact mission over and over again of course, and thus are not very flexible.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Our simulators are built for two different applications: the first is a traditional type of GPS signal simulation where a Windows application allows a user to set up static or dynamic scenarios, allows them to upload NMEA playback files, create jamming or spoofing signals, and generally tweak the RF signal in many ways, such as modifying power levels and antenna patterns and even creating space vehicle failures in real time. Our customers range from car, aircraft, and avionics manufacturers, to R&D labs, to the government and academia.
Our simulators also are used for a hardware-in-the-loop application that we call transcoding. It allows glueless retrofitting of existing GPS equipment with any and all the emerging PNT solutions such as LEO positioning and timing, celestial navigation, INS/IMU, CSAC holdover, and concurrent/multi-frequency GNSS using a 1×1-in. transcoder module. Our transcoders fly on Air Force aircraft, are used to retrofit telecom equipment, and allow deep-indoors and underground GPS reception. Transcoders created an entirely new market for simulators.
SYNTONY GNSS
Sylvain Daubas GNSS Simulators R&D Teams
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Manufacturers of GNSS receivers are targeting more precision and availability, especially in urban areas, which require acquiring more signals from more constellations and greater effort to minimize multipath errors. This confirms that an SDR design for signal generation is decisive to keep systems cost-efficient, as it directly benefits from Moore’s law. For instance, our new RTGS4-12 configuration is about four times more powerful (240 channels) than our previous standard configuration, for a similar budget level.
Regarding precision and RF quality, our simulators benefit from the same RF cards as Echo, our high-fidelity record and playback equipment, with a state-of-the-art RF front end: three channels at a 100 MHz sampling rate and a 16 bit IQ. The capacity to simulate protected signals is also crucial: with PRN Link, Constellator is ready for any present or future signal with encrypted spreading codes.
What are currently the greatest technical challenges to GNSS/PNT simulation?
Building a CRPA simulator is not an easy task, as this requires extreme levels of phase and time synchronization between several RF outputs, typically four, seven or more. This can be done in two ways: with a dedicated new RF board running with a single synthesizer for all channels or using the classical one, to which one should add a complex calibration mechanism. SYNTONY has made the tough choice, investing more at first in a mono-synthesizer version. However, this will benefit our customers, for which the usage will be simplified and it will save them a lot of time by shortening the calibration phase. This version already is available for sale.
On another note, it is a significant challenge to keep our product and its interfaces user friendly while also enabling our clients to configure each of the more than 500 parameters available (at the last count). We also keep in mind that new signals may appear, from LEO constellations for instance, answering to new needs such as autonomous driving. Constellator is HW ready for them, only requiring a software update.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Constellator currently is mainly used in laboratories, in many market segments. Because it was initially built in partnership with spacecraft manufacturers, it benefits from the high standards of performance of space industries and includes several advanced space-dedicated features.
On top of the typical usage inside the labs, two other SYNTONY simulator products that are directly derived from Constellator are used in the field:
ECHO Recorder & Playback is used to record the GNSS environment with ultra-high fidelity: today @ 100Mhz, and before the end of 2021 even up to @ 200Mhz. ECHO has been used by our customers in cars, trains and often in aircraft test flights. Another usage of ECHO is to detect and record scintillation phenomena, as we will soon do in Brazil.
SubWAVE (GNSS coverage extension for underground places) allows indoor positioning with precision, directly compatible with standard GPS receivers, which can be crucial for safety or operational reasons. We have installed SubWAVE inside subways stations and tunnels (for example, in Stockholm, Paris and New York), in road tunnels (soon in France, in the “Tunnel du Mont Blanc”), in an underground bus terminal (also in Stockholm), in underground train stations (in Switzerland), and before the end of 2021 also in an underground mine (in Finland).
Autonomous vehicles are being tested both on open roads and in controlled environments. (Photo: Trimble)
The advent of autonomous vehicles (AVs) is one of three revolutions in the automotive industry that will likely change this country as much as cars did over the last century. The other two are the conversion from internal combustion engines to electric ones and the integration of cars into digital traffic networks.
Once mass deployed, AVs promise to dramatically reduce the number of traffic fatalities (42,000 in the United States in 2020, a National Safety Council report shows). They will never be sleepy, distracted, aggressive or drunk — nor will they engage in such inane human driving behaviors as texting while driving, playing chicken with bicyclists, or running red lights. They also promise to reduce fuel consumption, harmful emissions and traffic congestion by optimizing routes and increasing the number of people using car services instead of owning their own car.
To realize this vision, however, cars will have to do a lot more than just find their way on their own. They will have to perform flawlessly in an unpredictable world that includes toddlers, reckless drivers, fallen trees, sinkholes, construction and accidents.
Among the many sensors aboard an AV, the GNSS receiver has a unique role. It is the only one that can provide absolute positioning, in the form of latitude and longitude coordinates, to within a couple of decimeters anywhere on Earth. As such, it is “a key enabler to a lot of the vehicles to know precisely where they are and whether it is safe to activate autonomous systems,” says Gordon Heidinger, automotive segment manager, Autonomy and Positioning division at Hexagon.
A GNSS receiver cannot achieve the level of accuracy required for autonomous driving without robust corrections. Fifteen years ago, the state of the art was real-time kinematic (RTK) corrections. However, “the cost of that equipment exceeded the cost of a small car at that time,” recalled Steve Ruff, general manager, On-Road Autonomy Division at Trimble. “They were targeting a system cost of about $200. Today, that number is below $50, including the antenna, the GNSS positioning engine, and the software that runs on it.”
Today, all automotive manufacturers are using a form of precise point positioning (PPP) corrections, which is a one-way broadcast, as opposed to the two-way communication between a base station and a rover required for RTK. This means that a single correction stream can serve an entire continent, Ruff pointed out. “Once a vehicle is manufactured, we will support it with our PPP corrections stream for at least 10 years, which is the typical service life of a vehicle.”
Obstacles to Adoption
To achieve mass-market adoption, AVs will have to overcome numerous and complex obstacles:
The technical difficulty of dealing with a limitless number of unanticipated challenges, such as poor visibility because of weather conditions, unpredictable human behaviors, complicated obstructions, detours and potholes
The need to map millions of miles of roads, develop vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications, and protect vehicle software from hackers
The difficulty, if not the impossibility, of handing off control to a human quickly enough to be safe when the system is unable to deal with a complex situation
Questions about legal responsibility and insurance liability
Ethical dilemmas about how to program the system to respond in emergencies
The development of appropriate federal and state regulations
Resistance from paid drivers who fear losing their jobs, including 3 million U.S. truckers, and from many other drivers, who fear losing control over their safety.
Trimble has approached all the major car manufacturers, has several programs in development, and has received multiple positioning requests for information (RFIs), Ruff said. “In 2018, Trimble’s RTX corrections service was the first solution adopted for production use in passenger vehicles, providing absolute precise positioning for General Motors’ Super Cruise system.”
Additionally, Trimble is working with Qualcomm and with SiriusXM, which will deliver Trimble’s RTX corrections over its satellite network, just like it does with music. “It is a good partnership because about 80% of the vehicles in North America are coming equipped with SiriusXM radio technology,” Ruff said. “The OEMs do not have to buy any additional hardware.” RTX corrections can also enter a vehicle via cellular IP, L-band satellite broadcasts and, potentially, over a V2I link.
Hexagon has proposed a PPP solution for automotive, “mainly because we essentially have the world covered with base stations, and that is a hard thing to do,” Heidinger said. “We have been running a corrections network for a very long time.” PPP’s one-way broadcast offers better cybersecurity because the GNSS receiver does not have to disclose its position, he added.
Swift Navigation is building a global corrections network. To make it suitable for the automotive market, the company is aiming to make its corrections service affordable and scalable. “We realized quickly that neither of the traditional RTK and PPP approaches were going to meet those requirements,” said Fergus Noble, company co-founder and CTO, “so we invested in developing a corrections service pretty much from the ground up.”
RTK provides high accuracy and short convergence times but is typically costly to deploy because it requires a very high density of stations, Fergus explained. As a consequence, most providers do not have continuous coverage over a wide area. Conversely, while PPP is a true global solution, it is less accurate and takes a long time to converge. “That may be fine in a marine or land-surveying application, but not if you are driving through city tunnels and bridges and need it to be able to reacquire a high-accuracy position within a matter of seconds. Therefore, we took a hybrid approach, together with a lot of new IP that we developed.” The service provides coverage in all the United States and most of Europe, and is being tested in Japan, South Korea and Australia.
Accuracy and Integrity
A common target accuracy for lane-level positioning is 20 cm 95% of the time. That means that AVs need to know when their positioning accuracy falls beneath that threshold. “We are building into our positioning solutions an accuracy metric that is output along with the position information we are providing,” Ruff said. “[The metric] can be used by the intelligence in the system to decide whether it can rely on the GNSS solution or needs to switch to one of the other complementary technologies because GNSS accuracy is not fulfilling its lane discipline.”
Heidinger noted the importance of economies of scale when mass-producing vehicles, where cost and ease of manufacturing become factors. “We can take some of our high-end equipment and get you 2 cm of accuracy with this technology, but the price point and the feasibility of this going into mass production for automotive is not favorable,” he said. “So, we’ve taken the approach of providing a software positioning engine that can be fit onto any hardware.”
Hexagon is developing products in partnership with STMicroelectronics, using the company’s Teseo V family of measurement engines. “ST is one of the established leaders of automotive GNSS solutions,” Heidinger said. “We take their measurements and put our positioning and corrections solution behind that to give positioning with lane-level accuracy.”
Noble agrees on the importance of knowing the reliability of a vehicle’s GNSS-based lane accuracy. The prevailing approach, which fuses data from GNSS and other sensors, makes it acceptable for one data source to be temporarily unavailable if the system is aware of that outage, he said. “That is where you start to see Swift, and others as well, focusing on the notion of integrity.”
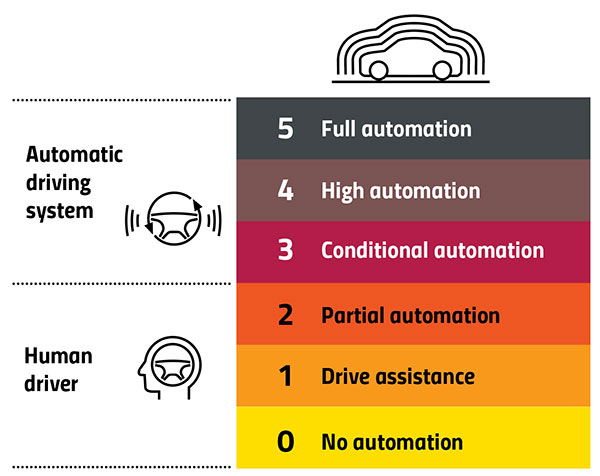
An AV’s level of autonomy determines its behavior during GNSS outages. For systems with Level 2 autonomy and below, the driver must remain engaged, while Level 2+ and Level 3 systems will alert the driver to retake control when needed. If a driver of a Level 2+ or higher system fails to reengage, the AV’s reaction depends on the system and manufacturer.
“When we start to see Level 3 or above self-driving systems come onto the market, they will require that the GNSS component has an ISO 26262 safety certification,” Ruff said. “Many companies, including Trimble, are going through, or have gone through, the process of safety-certifying their offerings. As part of the AV system’s safety architecture, they will build in the capability to safely curb the vehicle if the system detects a malfunction or a spoof or some other type of problem.”
Automation Levels
In 2014, the international Society of Automotive Engineers released a standard, adopted in 2016 by the U.S. National Highway Traffic Safety Administration, that classifies cars in six levels, ranging from Level 0 (no automation) to Level 5 (full automation, meaning vehicles that can handle the full spectrum of road and traffic scenarios without any assistance from the driver). While many production models already incorporate various forms of Level 1 driver assistance, no current production car exceeds Level 2, or partial automation, which requires the driver to monitor the vehicle’s surroundings and take over as necessary. No test vehicle has yet achieved Level 5.
Image: GPS World
Other Sensors
Beyond lane-level positional accuracy, safe driving also requires avoiding collisions with other vehicles in the same lane or straying into it. Cameras, lidar and radar will detect other vehicles as well as fixed infrastructure and random obstacles, measure their distance, and monitor their movement.
While lidar scanners are better than cameras as detecting sharp-edged features, such as curbs, cameras are better at detecting and interpreting visual cues, such as road signs and the location and curvature of lane markers. In bad weather, radar is essential, because radio waves, unlike light waves, can penetrate rain, snow, fog and even dust, enabling radar to “see” where cameras and lidar cannot. However, radar sensors cannot see much detail, and cameras do not perform well in conditions with low light or glare.
Besides providing data about a vehicle’s trajectory, inertial navigation systems (INS) also measure its attitude (roll, pitch and yaw), enabling the software to better correlate and interpret data from the other sensors.
For example, when a car brakes sharply, its front end goes down; any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface.
INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and the vehicle’s true heading. A slip angle as small as 0.5 degrees can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks. Wheel-speed sensors also help verify the vehicle’s movement.
“All these technologies have their limitations,” Ruff said. “However, if you design the system, including all these technologies, then you can come up with a robust, safe combination that will enable autonomous driving.”
In addition to helping to avoid collisions, these other sensors provide relative positioning by comparing the images they acquire with highly precise maps to help locate the vehicle, especially in urban environments, which are well mapped and rich in recognizable landmarks.
Imagine an AV moving through different environments. It might travel from a city with urban canyons that degrade GNSS navigation, yet with landmarks that help relative positioning, to a rural environment devoid of both. The AVs’ algorithms must constantly weigh how much to rely on the different sensors. “Many of the OEMs and car companies are seeing that even rain mist on a highway is very bad for lidar and cameras, because it creates a big blur, but that is where GNSS will perform really well because it is open sky,” Heidinger said. “So, the two types of sensor systems complement each other very well.”
“Odometry sensors, such as a wheel-speed sensors, minimize any potential drift and add robustness to data that may have a GNSS outage of greater than 5 seconds, such as longer tunnels,” said Wesley Hulshof, principal engineer – ADAS Testing at Racelogic.
Photo: Racelogic
Noble sees a split in the industry. Companies such as Waymo and Cruise are pursuing Level 5 autonomy and are “heavy users of lidar” as well as other sensors. Companies such as Swift are focusing on Level 2 and Level 3 series production vehicles. “If you are making a mass manufactured vehicle for the production market, it rules out using a lidar sensor,” Noble said. “It is just too costly and complex right now to use. So, typically, if you look at the systems that are out on the market today, such as a Tesla Autopilot or a GM Super Cruise, they are very reliant on the camera as the primary sensor. Obviously, also inertial and some use of radar.”
Maps and Communications
While accurate and up-to-date maps have an important role to play in making autonomous driving possible, the more detailed maps are, the more the world they describe is constantly changing.
Meanwhile, the sensors keep improving and dropping in price, making maps less important. In the end, AVs — like human drivers — will probably rely much more on their ability to “see” and analyze their environment moment-to-moment.
Also like their human counterparts, they will gain experience. Unlike human drivers, however, AVs will be able to instantly share their experience with every other vehicle in their area via vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications.
V2V communications will enhance safety by informing AVs of the trajectories of nearby vehicles. If a vehicle is speeding toward an intersection and not slowing for a red light, it will be communicating its position and trajectory to other cars over a V2V link, Ruff explained.
“Then your car can make the intelligent decision to pump the brakes and avoid that collision. The same positioning stack that operates as part of the AV stack can also be used to support V2V-type applications, and the position of the vehicle will be much better than what the current V2V spec states.”
Different Approaches
Each GNSS manufacturer is taking a different approach to AV positioning.
The worlds of traditional automotive positioning and the products on which NovAtel has historically focused are coming together, Heidinger said. “The autonomous technology is demanding it and pushing for higher performance and safety-of-life functionality. Hexagon is bringing high-performance positioning solutions to the automotive industry in a manner that accepts automotive manufacturability, quality and efficiency.”
The company has also joined the 5G Automotive Association (5GAA), a large consortium developing AV solutions. “There are probably 100 companies in the industry coming together and helping to develop that vehicle-to-network communications solution, including telecom partners and automotive partners, and we are providing the GNSS expertise,” Heidinger said. “To meet the high-volume production-intent applications, including automotive quality, we recently developed a receiver based off the ST Teseo V family of measurement engines. We have an ST Teseo V set of chips on the PIM 222A product that launched in May geared exactly toward the automotive market.”
By contrast, Trimble is not focused on providing GNSS receivers or other hardware. “We allow the Tier 1 automotive manufacturers to architect the system using the components that they have selected from their preferred suppliers,” Ruff said. “We tailor our positioning solution to work with their architecture. So, we are agnostic as to the selection of the GNSS receiver, the IMU, the operating system running on the host system, and the host processor that runs the software. We can adapt our stack to run on virtually any system, using measurements from any GNSS source that meets our API requirements.”
For Swift, its “vision from day one has been to bring this type of precise positioning technology to mass market applications, such as automotive, which is a big focus for us,” Noble said. “That includes autonomy, but also ADAS, HD navigation and V2X. We do not want to be a hardware supplier in the automotive supply chain. Our boards are focused on professional and industrial markets.”
Swift’s automotive software, called Starling, runs on the vehicle’s computer. To generate a precise position, it ingests raw sensor data, as well as corrections data from the company’s Skylark network. “We focus on providing a precise-positioning stack that layers on top of any of this current generation of low-cost, automotive-grade receiver hardware from companies like STMicroelectronics.”
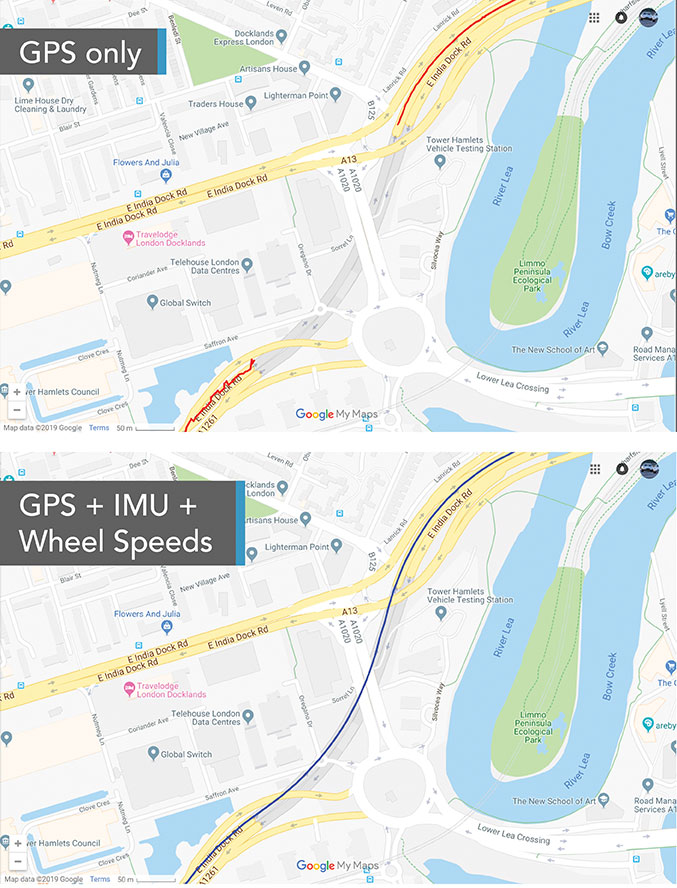
This test in London shows the value of inertial and wheel speed sensors. (Image: Racelogic)
The Future
Speculation abounds as to when AVs will enter mass production and how the transition from human to robotic drivers will take place. “There might be a ‘classics only’ lane in the future,” Heidinger said “that will be the only place where cars are allowed to be driven manually.”
Safety-enhancing automotive devices typically start out as optional extras, then get incorporated into best-practice standards promoted by independent bodies. Eventually, they become compulsory.
Some automakers have committed to creating their own AVs, while others are intent on creating a turnkey solution to transform conventional cars into driverless models. However, the initial market for AVs likely will be commercial fleets rather than individual consumers.
“It will still take quite a few years before we see cars take over and drive themselves, because legislation, insurance and these sorts of things will have to happen along with the technological advances,” Heidinger said. “But the positioning side is becoming more defined. We are seeing things like L5, the Galileo constellation, coming in and becoming more available. There are more constellations providing more data for use in our solutions, so that is promising.”
Swift’s Noble said, “Most of the major manufacturers working on Level 2+ and Level 3 systems are realizing that precision GNSS will be a key component of their architecture. Most of the major OEMs have signaled some level of intent to integrate this technology. Most are tracking to start the program next year,” he added.
“We envision that in five or six years every vehicle will have a single positioning utility on board that will serve all the location-aware applications on the car — whether it is an autonomous vehicle, V2V or V2I,” Ruff said. “It will meet the most stringent accuracy requirements from all the applications and serve navigation, telematics, security, V2X and AV/ADAS applications.”
A test of Racelogic’s parking assistance system. (Photo: Racelogic)
Racelogic helps vehicle manufacturers develop autonomous vehicle technology and test them on indoor test tracks and the open road.
Racelogic helps vehicle manufacturers develop autonomous vehicle (AV) technology and testing houses test them. Over time, regulatory and consumer testing has evolved from indoor test tracks to outdoor open-road tests, and then to indoor controlled test environments.
“Due to their application, advanced driver-assistance systems (ADAS) originated and are still mainly developed and assessed on open-sky, controlled test tracks, tackling the most common killed and seriously injured (KSI) accident types,” said Wesley Hulshof, principal engineer – ADAS Testing at Racelogic. “These assessments usually make use of sophisticated driving robots for closed loop, centimeter-accurate path following and precise speed-controlled test-track assessments. The robots can only attain this accuracy by being fed the speed and positional data by GNSS sensors, such as the Racelogic VBOX.”
Accuracy is key to conducting assessments for the European New Car Assessment Programme (Euro NCAP) and the U.S. National Highway Traffic Safety Administration (NHTSA). Using GNSS in conjunction with RTK base stations provides centimeter-level accuracy in position, said Hulshof, as well as accurate speed and heading information to measure ADAS data to both static and moving targets. Additionally, combining a GNSS receiver with an inertial measurement unit (IMU) allows for low-drift, high-accuracy speed and positioning information within areas of high GNSS multipath or temporary occlusions, such as gantries, bridges, forests or built-up areas.
However, “people do not just drive on closed test tracks with accurately positioned targets and infrastructure,” Hulshof said. “They do not drive at a constant throttle position and maintain an exact time-to-collision to the vehicle in front of them, like robots do. In fact, people often drive erratically.”
For these reasons, testing houses are conducting supplementary assessments on the open road, under real-world conditions. In these conditions it is still important to know vehicles’ positions and speeds to localize them and validate the system’s sensors, networks and algorithms.
Testing Stages
Stage I: Controlled
ADAS was developed for outdoor use because this is where car crashes occurred. For this, an open-sky GPS signal was essential for positioning. The types of tests and level of scientific rigor meant that the tests could be performed on closed test tracks.
Stage II: Randomized
Tests were brought to the open road to add elements not found within a closed environment such as traffic and higher speeds of the vehicle under test. For this, extra sensors were employed to add robustness in areas of obscured GNSS coverage.
Stage III: Controlled
Testing is brought back indoors for climate control and to assess L3/L4 AD functionalities such as valet parking.
Because open-road testing does not permit being constantly within range of a static base station, Racelogic developed a moving base solution for open-road testing that gives accurate relative positioning between two or more vehicles.
The increased demand for real-world testing of ADAS has generated demand for reliable ground truth data. “For example, if you consider a car driving on the winding roads of the Italian Alps and the position is out by 2m,” Hulshof said, “that is the difference between lovely scenery and falling off the side of a cliff. So, you need centimeter-level accuracy in the positional algorithms of the self-driving car, but also in the assessment tools, while we are testing it. For that reason, we still need GNSS and would ideally need RTK.”
To meet this demand, Hulshof said, Racelogic produced its own networked transport of RTCM via Internet protocol (NTRIP) solution, consisting of a modem and associated service provider. It allows for global coverage of high-accuracy, absolute positioning of a test vehicle in open-road conditions. Both the NTRIP and the moving base solutions allow ADAS testing to centimeter-level accuracy on the open road without the need to be in radio range of an RTK base station, thereby greatly expanding the testing possibilities.
“Whilst both the NTRIP and the moving base options allow for high-accuracy positioning,” Hulshof said, “they are still reliant on having an open sky for good GNSS coverage. IMU integration allows for improved accuracy over short periods of occlusion, but to truly give as accurate a signal as possible we need to be open to accept information from multiple satellite sources. That is why highest longevity accuracy is only achieved by using the GPS, GLONASS, Galileo and BeiDou constellations to provide the best RTK positioning performance in areas where that was not previously possible.”
To control the environment and allow for year-round testing, test laboratories such as the Insurance Institute for Highway Safety (IIHS) facility in Arizona and Asta Zero in Sweden have purpose-built covered test facilities, giving shelter from extreme heat or cold. Testing inside both set-ups, however, still relies greatly on the test vehicle positioning. Standard positioning techniques via GNSS in these situations is simply not possible. Therefore, Hulshof said, Racelogic designed the VBOX Indoor Positioning System (VIPS), which allows for seamless testing indoors or outdoors. “Because this system works as an alternative to satellites, with the in-vehicle VBOX allowing RTK-level performance without GNSS, the test vehicle can travel from open-sky outdoor testing to a closed environment seamlessly, with no drop in data during the transition or afterward.”
Finally, Hulshof said, ADAS and AD systems have moved on from straight-line highway scenarios to low speed turning scenarios often performed away from the open sky previously required for accurate GNSS coverage. Examples include multi-story parking garages and valet parking. “Scenarios such as self-parking and park-assist assessments, as well as indoor L1 ADAS, are becoming increasingly common requests by manufacturers on test facilities.”
These environmentally controlled facilities can simulate real-life conditions that affect specific sensors — such as sensor flare, fog, mist and water films. These types of facilities use VIPS to give outdoor GNSS accuracy in an indoor controlled environment. “There is a trend toward bringing the testing from closed test track to randomized real world back into a highly contained, climate-controlled area,” Hulshof said. “We then have an option for anything.”