Russia has launched another GLONASS-M satellite into space, reports Spaceflight Now. The launch occurred on Sunday. The Soyuz 2-1b rocket lifted off at 22:54 GMT (6:54 p.m. EDT) from the Plesetsk Cosmodrome about 500 miles north of Moscow.
The GLONASS-M satellite, designated No. 54, was manufactured by ISS Reshetnev and is designed for a seven-year operational life. A spokesperson with the Russian Aerospace Defense Forces told Interfax the spacecraft was communicating with ground controllers and functioning normally.
Five GLONASS satellites are scheduled for launch this year.
On the night of February 12-13, the GLONASS-M #54 spacecraft left ISS-Reshetnev’s facilities in Zheleznogorsk, Russia, and was transported by air to the Plesetsk cosmodrome.
A Soyuz 2.1b / Fregat rocket with the navigation satellite GLONASS-M #54 on board is scheduled for launch in mid-March. The exact launch date is due to be set at a meeting of the state commission.
As soon as the satellite arrived to the spaceport, the joint team of ISS-Reshetnev specialists and the cosmodrome’s staff members started the launch preparation campaign.
Five satellites of the GLONASS-M series are planned for launch in 2014 to maintain GLONASS in its full operational capability. Three satellites will be launched in a single batch, while the other two will fly into orbit in two single launches.
GLONASS-M #54 will also carry an additional instrument – a high-accuracy thermal stabilization unit that was installed on the spacecraft to undergo testing and flight qualification. Next-generation spacecraft intended for the GLONASS system are going to be equipped with this instrument to provide increased positioning accuracy.
Three more GLONASS-M spacecraft have already been built by ISS-Reshetnev and are being stored at the company’s premises waiting for launch.
Russia will deploy up to seven ground monitoring and augmentation stations for GLONASS outside of Russia, reports The Voice of Russia radio. GLONASS/GNSS Forum Association Executive Director Vladimir Klimov explained the plans at a conference.
“It is planned to deploy about six or seven stations on foreign territories this year,” Klimov said. Negotiations for the stations are now taking place with foreign nations, he said.
About 50 GLONASS ground stations are planned for construction. The stations will significantly improve GLONASS performance and provide efficient applications for high-precision navigation services and smooth monitoring of systems of coordinates and Earth rotation parameters, he said.
Currently, there are 46 GLONASS ground stations on Russian territory, eight in neighboring countries, three in Antarctica, and one in Brazil.
The Russian GLONASS/GNSS Forum is conducting a survey on the future of GLONASS.
When translated, the page provides the following background:
“One of the priorities of the GLONASS system is determined to ensure its competitiveness in the global market for satellite navigation services.”Currently, public customers of the federal target program “Maintenance , development and use of GLONASS for 2012-2020 ” prepared proposals on bringing the main characteristics of the system to a level that ensures its competitiveness in the medium term ( 2020 onwards ).
“It seems appropriate that in the preparation of these proposals, the opinion of the main consumers of navigation service providers and manufacturers are taken into account.”
The survey asks the following questions (translation provided by Innovation editor Richard Langley):
What characteristics of the GLONASS system in your view are the most critical for competitiveness relative to GPS, Galileo, and Compass considering plans for their deployment and development (accuracy of the “Space Segment,” access, stability characteristics, compliance with international standards on the time scale UTC and coordinate system, others …)?
Is it important for the competitiveness of the presence of GLONASS that there be additional services such as transferring information on one of the new navigation signals to provide a highly accurate global positioning mode PPP (Precise Point Positioning) by analogy with the E6 Galileo and B6 Compass signals? What extra services could you offer for implementing in the system GLONASS for civilian users to increase its attractiveness?
Is it critical for civil GLONASS to have a complete set of new code signals (L1, L2, L3)?
Is it important in terms of competitiveness, for the GLONASS satellites, in addition to the planned new code signals in the traditional GLONASS bands (L1, L2, L3) to add another signal in the range L5? Why? If yes, for which consumers is this important?
What are the characteristics, in your opinion, that should be achieved to ensure the competitiveness of the system in 2014-2015, 2020, after 2020?
What do you see as the most effective ways to achieve the desired values of the main characteristics of the GLONASS system, including measures of state support?
Is it critical to the competitiveness of GLONASS availability to have a document of the type “Standard GLONASS civil service,” which would give the key performance characteristics of GLONASS and these characteristics would be guaranteed by the “provider” of the GLONASS system (similar to the standards issued by GPS and Compass)?
Responses are being accepted until February 14. Send responses to [email protected] with Questionnaire TTX in the subject line. Responses will be compiled and prepared for appropriate treatment to public customers of the federal target program “Maintenance, development and use of GLONASS for 2012-2020 years. “
By Denis Lyskov, Deputy Head of the Russian Space Agency, Roscosmos
The fundamentals of Russian government policy in satellite navigation are defined in Presidential Decree #638 of May 17, 2007, and specify that:
GLONASS services are provided globally and free of any user fees;
GLONASS is used as a basis of the National Positioning, Navigation and Timing System.
To efficiently implement the government policy in satellite navigation, in March 2012 the Government approved the dedicated Federal Program focused on GLONASS sustainment, development, and expansion of applications. This program covers activities aimed at:
improving the accuracy and integrity of navigation;
ensuring conditions for guaranteed positioning, navigation, and timing solutions in restricted visibility, interference, and jamming environments;
enhancing current application efficiency and broadening application domains.
This year, the extensive efforts aimed at development of new generation GLONASS satellites, augmentations, and performance monitoring facilities were taken. The results obtained help to define the main directions of GLONASS development for the upcoming years.
Space Segment
The new navigation satellite will ensure navigation services for all categories of users using current frequency-division multiple access (FDMA) signals in L1 and L2 as well as new code-division multiple-access (CDMA) signals in L1, L2, and L3 bands. The full set of GLONASS signals will be transmitted using two separate phased antenna arrays — one for FDMA signals, and the other for CDMA signals. Introduction of new signals broadens the possibilities of improving the GLONASS orbital constellation configuration, structure and composition of navigation message data, as well as accuracy, reliability, and integrity of navigation solutions in various conditions. The constellation sustainment plan includes the launch of GLONASS-M-55 satellite in 2014. This satellite, similar to GLONASS-K-11 launched in February 2011, will carry an L3 navigation payload and transmit a CDMA signal in L3.
The L3 CDMA signal will also be transmitted from seven more GLONASS-M satellites planned for launch in 2014–2015.
The implementation of a GLONASS modernization program will produce a more than four-fold improvement of accuracy. This will be made by means of:
ground control segment upgrade;
introduction of a new on-board atomic frequency standard, based on different technologies;
introduction of advanced technologies of satellite control, based on intersatellite links in radio frequency and optical bands;
transition to PZ-90.11 Geodetic Reference System aligned to the International Terrestrial Reference Frame (ITRF) at the millimeter level;
synchronization of the GLONASS time scale with Coordinated Universal Time UTC (SU, for Soviet Union) at the level of less than 2 nanoseconds while keeping the UTC (SU) own long-term stability at 10-17.
Augmentations
Augmentations play an important role in improving GLONASS performance. With the launch of Luch-5V into an orbital position of 95° E in 2014, the first phase of the System of Differential Correction and Monitoring (SDCM) constellation deployment will be completed. SDCM will provide satellite-based augmentation services (SBAS) in L1 (1575.42 MHz). Simultaneously, the deployment in the Far East of the Russian Federation of uploading and monitoring facilities for Luch-5A positioned at 167° E will be completed. Special attention is being paid to ensuring compatibility of Luch-5B satellite (16° E) and Inmarsat-3F2 satellite (15.5° W) carrying a European Geostationary Navigation Overlay System (EGNOS) payload.
The future transition to using heavier satellites carrying L1/L5 transponders will present an important stage of SDCM development. The first launch of such satellites is tentatively planned for 2018.
With the purpose of improving the quality of SDCM services, the ground network consisting of several dozen sites will be deployed over the Russian territory, and more stations will be deployed along the Russian border to improve the accuracy of generating the vertical ionospheric delay map.
Apart from SBAS technology development, a system for ensuring Precise Point Positioning (PPP)service is planned for development. PPP service will be provided using geostationary Earth-orbit (GEO) satellites transmitting in L1/L3 GLONASS bands. The L1/L3 transponders are planned to be installed on board future GEO satellites. Considering the common parameters (carrier frequency, pseudorandom noise pulse rate, data rate) of PPP and GLONASS’ own signals, the informative capacity of the former is an order of magnitude greater to ensure rapid broadcast of high-precision orbits and clocks.
For PPP technology development, the global network of measuring facilities is of extreme importance. The global network ensures global monitoring of navigation signals and generation of initial data for high-precision determination and prediction of orbits and clocks.
International Cooperation
Cooperation with GNSS providers focuses on protecting the spectrum allocated to radionavigation satellite service, pursuing compatibility and interoperability of GLONASS and SDCM with other GNSSs and augmentations, creating an international GNSS monitoring system.
One of the priority directions of international scientific cooperation is the cooperation with the International GNSS Service through the exchange of measurement information between its members. At the same time, GLONASS measuring and monitoring facilities will receive and monitor all open navigation signals of all GNSSs.
A lot of attention is paid to enhancing GLONASS awareness. Since 2009, the International School on Satellite Navigation has been held annually in the Russian Federation. The Russian Federation has been preparing to host the United Nations Workshop on the Applications of Global Satellite Navigation Systems.
Denis Lyskov is state-secretary, deputy head of the Federal Space Agency of Russia (Roscosmos). He started his carrier in the Russian space industry after graduation from the Moscow Aviation Institute in 1996. He has been working in Roscosmos for the last two years and supervising the GLONASS program since June 2013.
Phones sold in Russia will have to use GLONASS or GLONASS + GPS as of 2014, according to a report from the Voice of Russia. Phones with only GPS will be illegal in Russia, and any mobile devices imported will have to support GLONASS.
A new bill claims that in order to guarantee stable operation of a unified telecom network in Russia regardless of conditions, it’s necessary that the satnav system used be the one controlled by the Russian Federation. New requirements for mobile devices with satellite navigation capabilities are expected to follow.
The authors of the bill note that after the bill is adopted, its requirements will cover all manufacturers and vendors of cellphones, making it impossible to sell a mobile device without GLONASS support.
The Telecom Ministry and industry watchdog Roskomnadzor will oversee the changes.
Russian scientists propose a new code-division multiple-access signal format to be broadcast on a new GLONASS L3 signal. Once implemented across the modernizing GLONASS constellation, this will facilitate interoperability with — and eventually interchangeability among — other GNSS signals. The flexible message format permits relatively easy upgrades in the navigation message, if required.
By Alexander Povalyaev
Navigation messages (NM) developed and broadcast so far, by both GPS and GLONASS, are fixed, regular structures including pages (frames), subframes (rows), and words. Despite their simplicity, such structures are very conservative. The only possibility to update such navigation messages is restricted to the use of previously allocated backup frames. Increasing numbers of such frames make for ineffective use of navigation message transmission capacity. Conversely, the relatively small number of backup frames restricts the potential for future navigation-message upgrades.
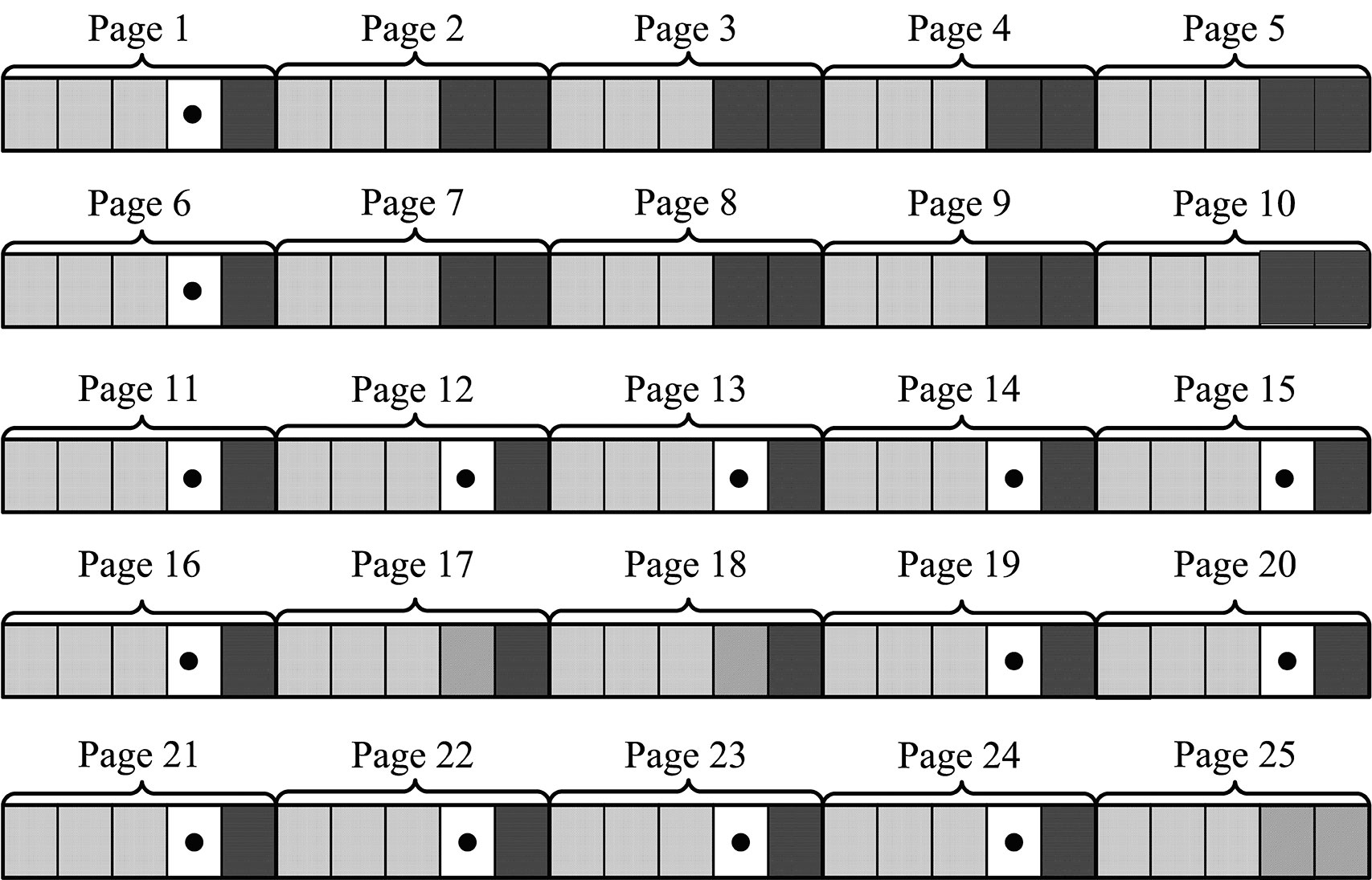
This concept is illustrated by the next two figures. Figure 1 shows the structure of GPS NM superframe.nBackup subframes are showed in bold dots. We can see that from 125 subframes of a GPS NM with a duration of 12.5 minutes, 14 subframes (or roughly 11 percent) are backup ones.
Figure 1. Backup of GPS NM superframe.
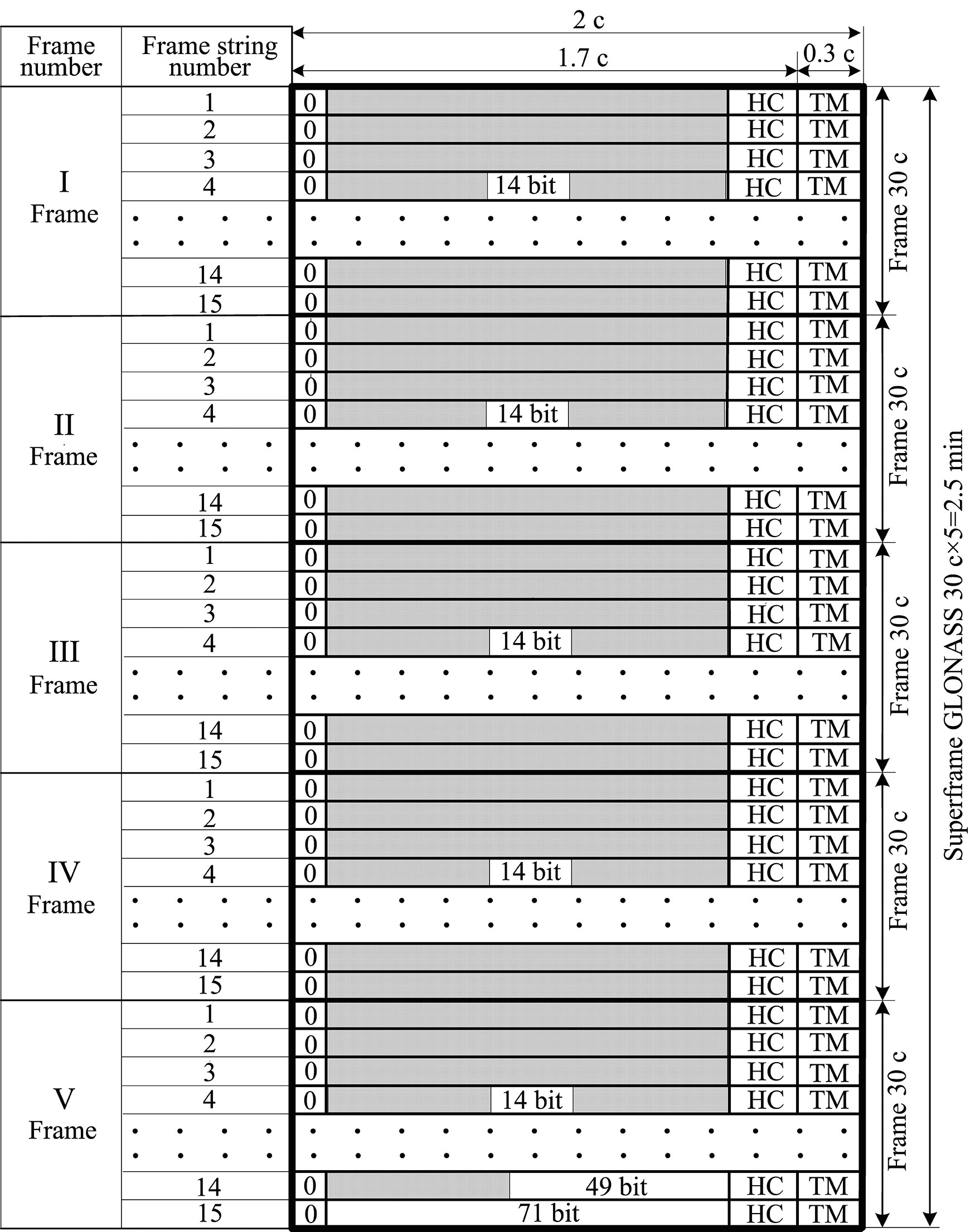
Figure 2 shows the structure of GLONASS NM. Backup frames with indication of bit numbers are shown by unhatched fields. In the GLONASS superframe with a duration of 2.5 minutes, these bits occupy only about 3 percent.
If we assume a data equivalence transmitted in the GLONASS and GPS navigation solutions, we can see that data transmission rate in GLONASS is five times as much as in GPS. This is explained by the higher redundancy of the GPS NM. Besides the roughly 11 percent of subframes kept in backup, the GPS superframe reserves field for transmission of 32 satellite almanacs, although the number of satellites in GPS constellation is always less than 32. As a result, the NM transmission channel in GPS used ineffeciently.
For GLONASS, the situation is different. The NM includes only about 3 percent of backup bits, and the superframe reserves field for transmission of only 24 satellite almanacs. This significantly increases the NM transmission channel efficiency relative to GPS, but causes big problems during any process of system update.
In these cases, upgrades or updates should only occur when they furnish backward compatibility, which means that previously manufactured user equipment can still maintain its compatibility with the updated system. When generating a NM in the form of fixed, strictly regular structures including pages (frames), subframes (rows), and words meeting the backward compatibility principle, this means that update sonly can be done using backup frames, because modification of basic, non-redundant frames will produce problems with earlier user equipment health. From this point of view, a large number of backup frames in very preferable.
Difficulties. As an example, let us consider the problems that arise in the process of a GLONASS upgrade, the purpose of which is to increase the number of GLONASS satellites in the constellation up to 30. Such an upgrade can be done in order to exclude areas of dilution of precision (DOP) degradation that arise due to GLONASS’s symmetrical constellation geometry. To provide that the rule of backward compatibility is met, it is necessary that almanacs of six extra satellites be placed in backup bits of the superframe. But the number of such bits in the GLONASS superframe (as shown in Figure 2) allows placement of only one satellite almanac. Thus in the case of such an upgrade, the almanac of the first basic 24 salellites will be transmitted within the time of 1 superframe, that is, 2.5 minutes, and the almanac of the xis extra satellites will be transmitted consequently in backup rows within the time of six superframes, that is, 2.5 × 6 = 15 minutes.
Figure 2. Backup of GLONASS navigation message superframe.
A New Way. Avoiding such difficulties associated with NMs with fixed, strictly regular structures including pages (frames), subframes (rows), and words is possible through the use of a NM with flexible row structure. Such a structure was formed for the first time for the GPS L5 signal. In this structure, the NM is formed as a variable-row flow of different types. Each row type has a unique structure and contains specified information type, for example: ephemeris, almanacs of specified satellites, parameters of Earth pole movement models, parameters of ionosphere delay models, and so on.
User equipment allots a successive row from the flow, defines its type, and in accordance with the type allots data contained in this row. When using such NM structure, strict regularity of different data types received by user equipment is disturbed, but GNSS control system guarantees that data transmission delays for each data type in NM will not exceed maximum values previously defined in the interface control document (ICD). For example, rows with ephemeris data in the GPS L5 signal are transmitted a minimum of once every 24 seconds, the so-called restricted almanac of the system is transmitted minimum once every 10 minutes, and so on. (See the “Navstar GPS Space Segment/User Segment L5 Interfaces, IS-GPS-705,” www.navcen.uscg.gov/pdf/Number.pdf.)
Deploying a Growing GNSS. A flexible row structure of the NM provides more effective use of NM transmission channel capacity, especially during the stage of system deployment which, as experience has shown, may last several years. During this stage, the GNSS orbital constellation is not complete and thus the NM may be generated as a row flow containing almanacs of only those satellites that are actually included in the orbital constellation. Reducing the number of rows with satellite almanacs allows reducing the time interval per which ephemeris are transmitted. Obviously a NM with fixed regular structures does not permit this capability.
The main advantage of a NM with flexible row structure is the possibility of its evolutional upgrade meeting the rule of backward compatibility. For this purpose, the ICD of respective signals for developers of user equipment states that if the user equipment encounters unknown row types, it should ignore them. This allows adding new row types in the process off GNSS upgrade. Including rows of new types in the NM certainly lowers the transmission rate, relative to rows of old types.
Previously manufactured user equipment ignores rows with new types and therefore does not use innovations introduced in the process of GNSS upgrade, but at the same time its health is not affected. More recent user equipment gets the opportunity to use data both from old and new row types and therefore to use introduced innovations.
In this case, user equipment upgrade replaces old software versions with new ones. This replacement is not due to any invalidity of old software version, but the equipment owner’s desire to benefit from the innovations introduced by GNSS.
Very old row types may on the other hand be removed from NM. At that point, very old and not-upgraded user equipment would become non-operational. This situation is quite normal because it may be considered as excluding excessively obsolete user equipment from operation.
When using flexible row structure, a GLONASS NM upgrade as in the previous example on exceeding the number of satellites up to 30 would mean simply exceeding the number of rows with the type defining the structure of almanac data. In this case, transmission rate of ephemeris and almanac would certainly degrade a little, but it would require no conversion of user-equipment software.
Status. Currently GLONASS uses signals with frequency separation in L1 (1592.9 – 1610 MHz) and L2 (1237.8 – 1256.8 MHz). The system upgrade now underway will in the long-range outlook turn to signals with code-division multiple-access (CDMA) in L1, L2, and L3 (1190.35 – 1212.23 MHz). One satellite has been launched transmitting signals with code separation in L3.
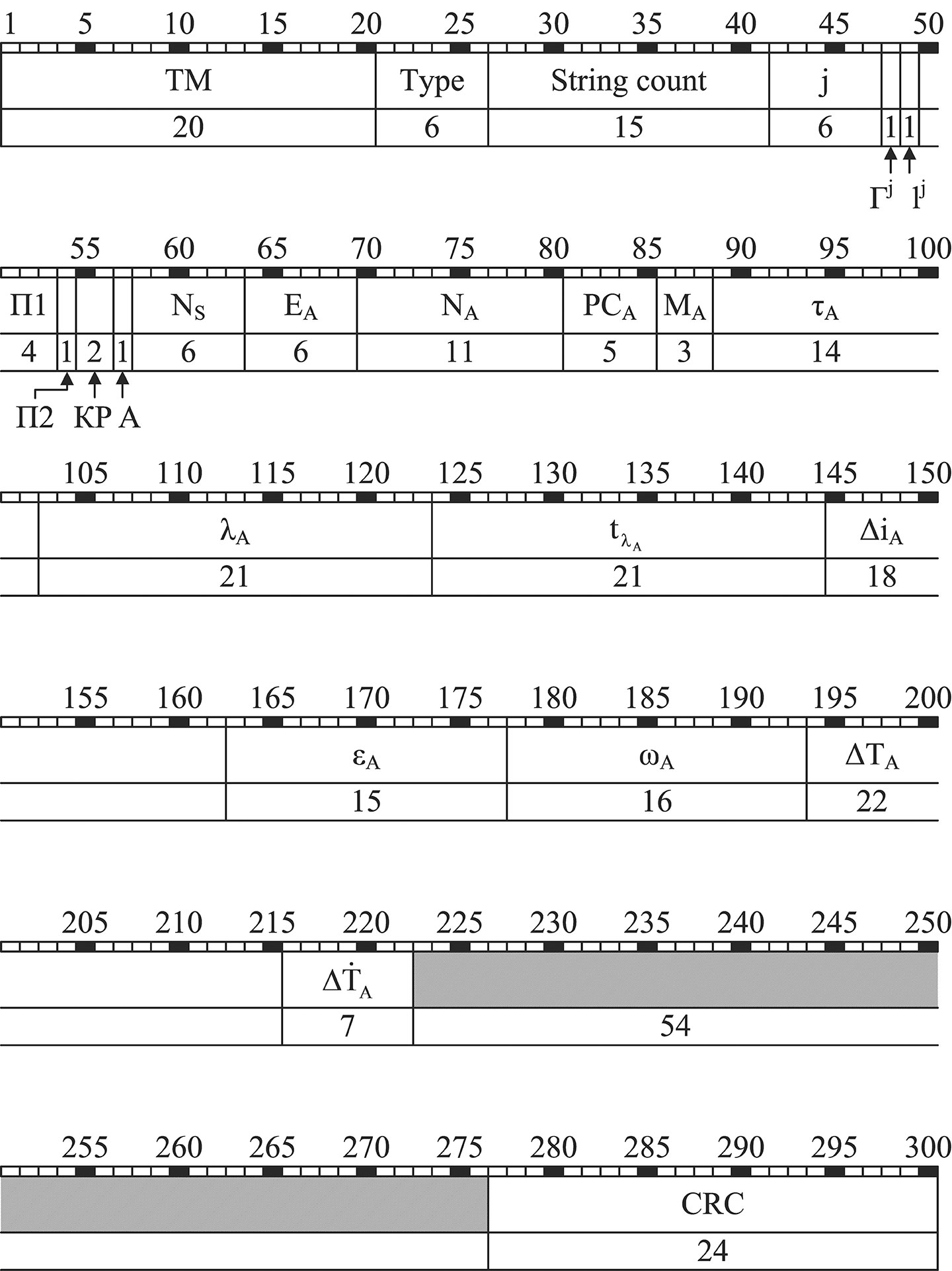
The NM of all new GLONASS signals with code separation, or CDMA, will have flexible row structure. Documents are now being developed concerning NM row structure of this type. For example, Figure 3 shows the structure of 20throw type for open signal L3OC with code separation in L3 containing almanac. L3OC signal rows contain 300 bits and have time interval of 3 seconds.
Figure 3. The structure of 20th row type for GLONASS open signal L3OC with code separation.
Parameters shown in Figure 3 have the following meaning:
TM time mark signal Type row type (in this case = 20) String count time mark numeralization; j number of satellite transmitting present NM Гj health operative feature («0») or unhealth operative feature («1») of satellite j navigation radiosignal lj reliability feature («0») or unreliability feature («1») of NM data in the current row with number j; П1 service bits for calling ground control system (НКУ) П2 satellite orientation mode feature: П2 = 0, satellite is in orientation mode to the Sun; П2 = 1, satellite is in the mode of anticipatory turn or in the mode change status (Sun orientation and anticipatory turn) КР feature of planned correction of onboard time scale (OTS) by ± 1 sec at the end of Greenwich current quarter А anomaly feature of the following row which, when onboard time scale has been corrected by ± 1 sec, will have 2 or 4 sec CRC control bits of cyclic redundancy code.
The above parameters of 20th row type are service parameters. Their content remains unchanged for all NS rows of L3OC. The following parameters of 20th row type are information parameters. Ns the number of satellites in the current constellation EA satellite almanac age NA calendar day number within 4-year interval to which almanac belongs РСA status register of navigation radiosignals L1, L2, L3 MA satellite upgrade with the number j τA correction for transition from OTS of the satellite with number j to GLONASS time scale (GTS) λA geodetic longitude of the first ascending node of the satellite orbit with number j within the day with number NA tλA the time (according to the Moscow decree time) when the satellite with the number j transits the first ascending node within the day with number NА ΔiA correction to the orbit inclination average value (63º) for the satellite with the number j εA satellite orbit eccentricity with the number j ωA satellite orbit perigee argument for the satellite with the number j ΔTA correction to average value (43,200 seconds) rate of change of Zodiacal orbital period for the satellite with the number j ΔTA Zodiacal orbital period for the satellite with the number j.
Acknowledgment
The author would like to thank Sergey Karutin and Dmitry Lerner for help in translation of this paper.
Alexander Povalyaev is deputy head of division in JSC Russian Space Systems and a professor at the Moscow Aviation Institute. He has been developing methods and algorithms for GNSS carrier-phase measurements processing for more than 30 years. Currently he focuses on developing new code-division GLONASS signals.
Plans to reduce funding for GLONASS is causing concern among deputies of the State Duma. The government officials predict a loss of trust in the world by the Russian navigation system, according to a July 29 Roscosmos article.
Reduced funding of GLONASS will lead to a reduction of the orbital grouping system below acceptable levels, according to the first deputy chairman of the Committee on Industry, Vladimir Gutenev. The U.S. GPS system is functioning and both Europe and China are developing systems, Galileo and COMPASS respectively. This will “lead to the loss of confidence of the international community in the GLONASS system and, consequently, to a reduction in its use globally. Russia will lose a strategic global instrument of political and economic prestige,” Gutenev warned.
The proposal is to reduce budget funding of the state space program in 2014 by 11.7 billion rubles, in 2015 by 13.5 billion rubles, and in 2016 by 40 billion rubles, according to the ITAR-TASS news agency. In addition, the federal space program of Russia for 2006-2015 already lacks 10.5 billion rubles funding, and this year there has been a 2.3-billion-ruble additional reduction in R&D.The funding was in part intended to build and put into operation phase 1 of the Vostochny booster side building, which would use the Soyuz-2 space rocket system.
The State Duma, according to the ITAR-TASS news agency, has recommended that the government of the Russian Federation maintains funding of federal programs on space matters in the amount provided by an approved state program.
Ria Novosti reports that Russia will launch two GLONASS navigation satellites later this year to make up for the loss of three satellites in the recent Proton rocket explosion after launch from the Baikonur space center in Kazakhstan, according to a senior space industry official.
“We are planning to launch two satellites from the Plesetsk space center [in northern Russia] to replenish the GLONASS orbital grouping following the recent Proton-M accident,” said Nikolai Testoyedov, the head of the Information Satellite Systems (ISS) company, which manufactures satellites for the GLONASS project.
The first GLONASS is scheduled for launch in the beginning of September, and the second at the end of October, according to Testoyedov. The official added that both satellites will be launched on board the Soyuz carrier rockets, which has proven to be more reliable than ill-fated Protons.
A group of 29 GLONASS satellites is currently in orbit, with 24 spacecraft in operation, three spares, one in maintenance, and one in test flight phase, according to Russia’s space agency, Roscosmos.
A Russian Proton-M rocket carrying three GLONASS navigation satellites crashed soon after liftoff today from Kazakhstan’s Baikonur cosmodrome, reports rt.com (Russia Today).
About 10 seconds after takeoff at 02:38 UTC, the rocket swerved, began to correct, but then veered in the opposite direction. It then flew horizontally and started to come apart with its engines in full thrust. Making an arc in the air, the rocket plummeted to Earth and exploded on impact close to another launch pad used for Proton commercial launches.
The crash was broadcast live across Russia. Fears of a possible toxic fuel leak immediately surfaced following the incident, but no such leak has been confirmed, rt.com reports. The rocket was initially carrying more than 600 tons of toxic propellants.
No casualties or damage to surroundings structures or the town of Baikonur have been reported.
As RT.com reports, the crashed Proton-M rocket employed a DM-03 booster, which was being used for the first time since December 2010, when another Proton-M rocket with the same booster failed to deliver another three GLONASS satellites into orbit, crashing into the Pacific Ocean 1,500 kilometers from Honolulu.
Photo: Russia Today
Photo: Russia Today
Photo: Russia Today
Photo: Russia Today
UPDATE: Russian Prime Minister Dmitry Medvedev has appointed a special government commission to investigate the causes of the crash and identify any officials who may have been responsible, reports the Christian Science Monitor. Medvedev also directed his government to prepare tougher oversight measures over the space industry to prevent such accidents in future, RIA-Novosti reported.
The launch of the next three GLONASS-M satellites is scheduled for July 2, according to an announcement by Roscosmos, the Russian Federal Space Agency.
A Proton-M launch vehicle with the upper stage DM-03 and three satellites was rolled out from Baikonur Cosmodrome’s assembly and test facility site 92A-50 on June 28 to launch pad 81. The decision was made to transport the launch vehicle at a meeting of the technical guidance of the State Commission, held the day before.
GLONASS-M satellite No. 47 was launched from the Plestesk Cosmodrome on April 26 at 05:23:41 UTC by a Soyuz 2-1b rocket.
“At 12.55 [08:55 UTC] the GLONASS-M spacecraft was taken under management by the Titov Main Test and Space Systems Control Centre. The spacecraft is installed [in orbit] and has maintained stable telemetry, and its onboard systems are operating normally,” said Colonel Alexei Zolotukhin of the Russian Aerospace Defence Forces.
The satellite, also known as Kosmos 2485 and GLONASS 747, was placed in orbital plane 1 and is drifting to its designated slot.
Initial two-line element set for the satellite:
1 39155U 13019A 13117.72709898 .00000014 00000-0 00000+0 0 85
2 39155 064.8833 235.0937 0113505 116.3660 245.7001 02.09126432 35
ISS Reshetnev, the manufacturer of the satellite, reported that the first communication session confirmed that the spacecraft is operating as designed, its mechanical systems deployed, and Sun and Earth acquisition was completed successfully.
According to the CEO – Chief Designer of ISS Reshetnev, Nicholas Testoedova, this GLONASS-M satellite will be a reserve. The following year, after the completion of the examinations and tests, it will replace one of the older exhausted units.
After reaching a designated orbit, likely slot 2 in orbital plane 1, the satellite will complete several weeks of commissioning and testing before entering regular service. There are currently 24 operational GLONASS satellites. The GLONASS-M satellite is the second generation GLONASS satellite.