ComNav Technology has introduced the Jupiter Laser RTK, which is designed for surveying and stakeout operations. The system offers a range of up to 50 m with centimeter-level accuracy and eliminates the need for traditional poles for efficient performance in routine and complex environments.
Equipped with a global night vision camera and laser technology, the Jupiter Laser RTK maintains high efficiency even in low-light or nighttime conditions. Its laser remains visible in the dark, enhancing usability during survey and stakeout tasks. The system also features visualized capabilities through a handheld data collector with an intuitive interface. Users can easily view point positions and follow directional arrows and real-time distances via Survey Master software’s 3D visual interface to accurately mark stakeout points.
The dual-camera system further enhances precision by guiding stakeout paths with a front camera for long-distance views and switching to a bottom camera for close-range detail. A flashing laser replaces traditional walkie-talkies near stakeout points, while visualization compensates for the laser’s invisibility in bright light or over long distances. These features improve efficiency by up to 30%.
Jupiter Laser RTK incorporates cutting-edge technologies such as the K8 board, which tracks up to 1,668 channels across all satellite constellations for reliable positioning. Its Super Datalink supports a 15 km working range and full-protocol compatibility, while Auto IMU provides tilt compensation up to 120° without manual initialization. Designed for durability, the system is waterproof, drop-resistant, and equipped with long battery life, ensuring reliable performance in diverse environments.
All three organizations are United Nations agencies and have previously issued similar statements independently. This is the first time they have spoken on this in one voice.
In 2020, ICAO issued a letter to all member states urging them to “strengthen CNS systems resilience and mitigate interference to GNSS.” It contained 13 recommendations resulting from three different work streams within the organization. The last of the recommendations was “… to support the multi-disciplinary development of alternative positioning, navigation and timing (APNT) strategy and solutions to complement the use of GNSS in aviation in coordination with ICAO and airspace users.”
In 201, IMO issued a circular on deliberate GNSS interference.. It called on nations to prevent interfering transmissions coming from their territories, issue warnings about known interference, and consider taking actions to prevent unauthorized interfering transmissions.
This ITU circular urged nations to “address the critical issue” by:
Reinforcing navigation systems’ resilience to interference.
Increasing collaboration between radio regulatory and enforcement authorities.
Reinforcing civil-military coordination to address interference risks associated with RNSS testing and conflict zones.
Increase coordination between aviation, military and radio-regulatory authorities.
Retain essential conventional navigation infrastructure for contingency support in case of RNSS outages and develop mitigation techniques for service loss.
A resolution by ITU’s 2023 World Radiocommunications Conference echoed similar themes. Still, it was criticized because its cautions and prohibitions came with the caveat, stating “…without prejudice to the right of administrations to deny access to the RNSS, for security or defense purposes.”
Many observers opined that there are few reasons for nations to interfere with GNSS other than security or defense concerns, which allows malicious actors to have carte blanche. Furthermore, it was suggested that the resolution might have included language to ensure that security and defense-related disruptions do not extend beyond a nation’s borders or similar provisions.
While no specific events are cited in the statement as motivating its publication, the death on Christmas Day of thirty-nine people aboard an Azerbaijan Airlines flight could have been the reason. The aircraft was approaching a Russian airport during an intentional interference event and was apparently misidentified by Russian forces. It was subsequently damaged by ground fire and crash-landed in Kazakhstan.
The recent joint statement cites, among other international agreements and actions, the ITU Constitution, which says, “All stations, whatever their purpose, must be established and operated in such a manner as not to cause harmful interference to the radio services or communications of other Member States.”
The joint statement concludes with:
Therefore, ITU, ICAO and IMO jointly and urgently call on their respective Member States to:
Protect the RNSS from transmissions that can adversely cause harmful interference, degrading, interrupting, or misleading signals used for civilian and humanitarian purposes.
Reinforce the resilience of the systems that rely on RNSS for navigation, positioning, and timing in relation to this type of interference.
Retain sufficient conventional navigation infrastructure for contingency support in case of RNSS outages and misleading signals, and develop mitigation techniques for loss of services.
Increase collaboration between radio regulatory, civil aviation, maritime, defense and enforcement authorities.
Report cases of harmful interference affecting RNSS to the appropriate telecommunication, aeronautical, and maritime authorities and the ITU Radiocommunications Bureau to enable the monitoring of the situation.
The United Nations and its agencies are collaborative bodies that operate by consensus and through the cooperation of members. As such, they have no ability to enforce standards or compel compliance with recommendations.
The Japan Aerospace Exploration Agency (JAXA) has selected Spirent Communications to supply its lunar positioning, navigation and timing (PNT) simulation solution. The solution will support JAXA’s lunar exploration efforts and aid in developing essential navigation infrastructure for future moon missions.
Spirent’s PNT X solution allows JAXA to simulate lunar PNT services in a controlled laboratory setting before their deployment on the moon. This capability is critical for testing and validating navigation equipment for lunar missions in accordance with the emerging LunaNet specifications, which include adaptable S-band frequency solutions. The system also ensures scalability for future space exploration.
Using the PNT X system, JAXA can experiment with novel S-band signals and evaluate the performance of receivers that rely on standalone S-band Lunar PNT signals or a combination of Lunar PNT and Earth-based L-band GNSS infrastructure. The simulation of these signal combinations demands high levels of precision, which Spirent’s specialized architecture is designed to meet.
This collaboration builds on a longstanding relationship between Spirent and JAXA. In 2011, JAXA utilized Spirent’s simulation technology to verify the performance of early Quasi-Zenith Satellite System (QZSS) receivers. Since then, Spirent simulators have supported multiple advancements in QZSS.
Spirent’s lunar PNT simulation solution seeks to present new opportunities for space agencies developing lunar constellations, satellite and receiver developers and organizations planning lunar missions or seeking to establish additional PNT infrastructure on the moon.
SPH Engineering has introduced UgCS Open, a free version of its widely used UAV flight-planning software. This new offering retains the core features of the paid UgCS Expert version, including 3D flight planning, terrain-aware automation and mission control.
The launch of UgCS Open is aimed at making advanced UAV flight planning more accessible while maintaining SPH Engineering’s focus on professional applications. This version is particularly beneficial for those starting with tasks such as lidar flights, UAV photogrammetry, automated inspections and terrain-aware mission planning.
UgCS supports a wide range of popular UAV platforms, including DJI models such as the M350, M300, Mavic 3 Enterprise and Matrice 4 Series. Unlike cloud-based solutions, UgCS operates locally on PC or Mac systems, offering full offline capabilities and a fast, 3D flight-planning environment. This makes it suitable for complex missions such as lidar surveys, photogrammetry and corridor mapping.
By introducing UgCS Open, SPH Engineering aims to lower the entry barrier for UAV operators while continuing to cater to the needs of experienced professionals requiring advanced mission planning tools.
OxTS has released WayFinder, a new localization solution designed for use in GNSS-denied environments. The system combines a GNSS/INS system, onboard processor, lidar scanner and two cameras to enable accurate positioning in areas with limited satellite coverage, such as urban canyons and underground tunnels.
Precise localization data is crucial for various industries, including autonomous navigation, automotive testing and sensor data georeferencing. However, obtaining accurate positioning information in areas with weak or unavailable GNSS signals has been a persistent challenge. WayFinder is designed to operate with minimal setup, requiring only basic configuration before use. The system’s key feature is Lidar Boost, a new software technology that enhances GNSS/INS performance in environments with unreliable satellite signals.
Lidar Boost employs advanced algorithms to process data from the integrated Lidar scanner, compensating for missing or erroneous GNSS updates in real time. This allows WayFinder to maintain high-accuracy localization in areas with limited satellite coverage and ensure smooth transitions between GNSS-supported and GNSS-denied environments.
The system can be used across multiple sectors. In ports, it can provide precise localization for autonomous vehicles operating among stacked shipping containers. In mining, it can support navigation for both underground and surface vehicles. WayFinder also offers a solution for indoor automotive testing without the need for fixed infrastructure. Surveyors working in areas with intermittent GNSS coverage can also benefit from its positioning capabilities.
Trimble and PTx Trimble have introduced Trimble IonoGuard, a new technology designed to enhance RTK GNSS signal reliability for precision agriculture applications. The system aims to improve positioning accuracy and reduce signal loss during challenging ionospheric conditions.
IonoGuard is now available for users of the PTx Trimble NAV-900 guidance controller and Trimble base stations equipped with the ProPoint positioning engine. The technology was developed to maintain RTK correction integrity and minimize positioning dropouts during periods of high solar activity.
Solar activity peaks every 11 years, with the next maximum predicted in 2025. This phenomenon can significantly impact GNSS signal stability, potentially affecting precision positioning. Solar Cycle 25, which began in 2024 and is expected to continue through 2026, may present substantial challenges with the possibility of global disruptions.
While solar cycle disturbances often go unnoticed by the public, high-precision RTK GNSS users in equatorial regions frequently experience impacts from solar activity throughout the year, which can lead to costly interruptions in agricultural operations.
IonoGuard is accessible through the latest PTx Trimble Precision-IQ firmware release. When used with compatible GNSS hardware, the system aims to deliver improved RTK performance during both routine operations and periods of solar disturbance.
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focus on high-accuracy positioning for autonomous vehicles in various environments. The papers are available here.
High-accuracy and resilient GNSS receiver for autonomous vehicles
The G3STAR GNSS receiver, a key component of the GAMMS Horizon 2020 project, is designed to improve high-definition navigation map production for autonomous vehicles. This Galileo-based receiver leverages the constellation’s Open Service features, including the High Accuracy Service (HAS) and Navigation Message Authentication (OSNMA). The research team shared that G3STAR’s ability to obtain and decode HAS messages from Galileo E6-B signals, as well as to process OSNMA bits from live Galileo E1-B I/NAV messages, demonstrates its advanced capabilities in providing secure and precise navigation data.
Preliminary tests highlight G3STAR’s proficiency in utilizing Galileo’s new services. However, the research team shared that further evaluation is necessary to fully assess its impact within the GAMMS project. Plans include validating the HAS data’s effect on navigation accuracy, conducting field tests to evaluate OSNMA availability in various environments and assessing the influence of the Chip Scale Atomic Clock on receiver performance. Additionally, comparing the G3STAR’s performance to commercial off-the-shelf receivers will be crucial in determining its overall contribution to the GAMMS navigation system and HD map generation. These evaluations will be carried out during upcoming test campaigns, providing valuable insights into G3STAR’s potential to advance autonomous vehicle navigation.
Filipe Carvalho, Ricardo Prata, Bruno Cardeira, Carlota Cardoso, Rui Nunes and António Fernández; “High-Accuracy and Resilient GNSS Receiver for an Autonomous Vehicle.”
GNSS/INS positioning software library
The autonomous vehicle industry has seen significant interest and investment throughout the past 15 years, with numerous practical applications emerging in the market. However, the technology for functionally safe GNSS/INS localization in autonomous vehicles is still not fully established. This gap is particularly crucial in safety-critical applications, where positioning algorithms must be robust against potential faults, especially in challenging environments. This paper highlights Hexagon’s Safety-Critical Positioning Solution, which addresses this need by providing both precision and safety for autonomous land vehicles.
The Positioning System is a safety-first software library that integrates GNSS signals, state space corrections from the TerraStar-X Enterprise service, inertial measurement units (IMUs) and additional vehicle sensors. This system employs an extension of Receiver Autonomous Integrity Monitoring techniques, originally developed for the aviation industry. It computes multiple navigation solutions using a solution separation technique, including an “all-in-view” solution and several subset solutions that exclude various fault hypotheses. These solutions are used to calculate Protection Levels (PLs), which provide an estimated upper bound on positioning errors, accounting for systematic biases and measurement faults. The PLs can be compared against alert limits to determine whether the navigation solution is sufficiently accurate for autonomous decision-making.
Eduardo Infante, Rudi Gaum and Laura Norman; “Demonstration of a Functionally Safe GNSS/INS Positioning Software Library for Autonomous Land Vehicles.”
Unmanned ground vehicles in off-road environments
This paper explores the emerging potential of radar for localization in GNSS-denied scenarios, particularly in challenging off-road environments where lidar-based systems struggle. The research focuses on two distinct settings: a dense forest and an underground mine. To address the localization challenges in these environments, the team developed a pipeline that combines an adaptive extended Kalman filter (EKF) for unstructured forested regions with a factor graph approach that fuses EKF estimates and point-to-plane radar iterative closest point (ICP) measurements for structured underground environments. The results demonstrate significant improvements in localization accuracy compared to existing methods, with the adaptive EKF proving particularly effective in forested areas.
The study provides valuable insights into the integration of radar and IMU data for vehicle localization in GPS-denied scenarios. While the adaptive EKF outperformed conventional EKF in structured outdoor settings, the standard EKF showed better performance in the highly dynamic conditions of the underground mine. The factor graph approach exhibited improved tracking performance, especially in reducing lateral drift along straight trajectory segments. The research also highlights the importance of selecting high-quality ICP registrations for radar-based SLAM. These findings pave the way for future research directions, including refining adaptive EKF for varied environments, exploring radar-based navigation on feature-sparse roads and enhancing the factor graph framework to incorporate additional sensor modalities.
Petar Mitrev and Mohamed Atia, “Radar-Inertial Localization for Unmanned Ground Vehicles in GNSS-Denied Off-Road Environments.”
GNSS plays a vital role in autonomous systems, providing essential positioning, velocity and timing (PVT) information for platforms such as autonomous vehicles, UAVs and ships. However, GNSS vulnerability to spoofing attacks poses significant security risks, potentially disrupting decision-making processes in these systems. To address this issue, researchers have developed a novel approach called Clock Drift Monitoring (CDM) for detecting GNSS spoofing in autonomous vehicles. Unlike previous methods that focused on directly detecting Doppler bias from measurements, CDM indirectly monitors the adverse impact of Doppler bias on the PVT solution, overcoming challenges associated with bias extraction from raw measurements.
The CDM technique exploits user clock drift derived from Doppler positioning as a detection metric. Under normal conditions with authentic GNSS signals, the clock drift remains stable, reflecting the user’s frequency source stability. However, spoofing conditions introduce counterfeit signals with consistent Doppler bias across all measurements, resulting in abnormal clock drift variations. A Generalized Likelihood Ratio Test-based detector identifies these variations, offering a practical and flexible method for GNSS spoofing detection. Field tests have validated the CDM technique’s effectiveness in real-world scenarios, demonstrating its robustness as a solution for autonomous vehicles to counter emerging cyber threats. This method’s ease of implementation, broader applicability and inherent robustness make it a promising approach for safeguarding autonomous systems against counterfeit GNSS signals.
Ziheng Zhou, Hong Li, Yimin Deng and Mingquan Lu Tsinghua; “Clock Drift Monitoring Based GNSS Spoofing Detection Method for Autonomous Vehicles.”
Read a roundup of recent products in the GNSS and inertial positioning industry from the March 2025 issue of GPS World magazine.
Surveying and Mapping
Photo: Eos Positioning Systems
New Eco-Friendly Carrying Case For Eos Positioning Systems’ receivers
The Skadi Gold, Skadi 300 and Skadi 200 GNSS receivers will now be shipped in a field-rugged carrying case made entirely from recycled materials. The case is designed to meet the demands of professionals who utilize GNSS technology in challenging environments. Its construction incorporates durable, eco-friendly materials that can withstand various field conditions, from remote wilderness areas to urban construction sites.
A key feature is its composition of 100% post-consumer recycled resin, which significantly reduces waste and promotes environmental sustainability, according to the company. It is specifically engineered to be shock-resistant and weatherproof.The case is provided as a standard inclusion with every purchase of the Skadi Gold, Skadi 300 or Skadi 200 GNSS receivers at no additional cost.
Multibeam Sonar Designed for bathymetric surveying
The Gemini 1200id is built on the same robust platform as the Gemini 720is multibeam sonar. The device features a 120° horizontal field of view, operating at both 720 kHz and 1,200 kHz acoustic frequencies.
The Gemini 1200id incorporates advanced noise reduction technology to significantly improve the attenuation of waterborne electrical noise to enhance imaging performance. An integrated speed-of-sound sensor ensures high positional accuracy of displayed targets, while CHIRP processing technology enhances target separation over extended ranges.
Compatibility with Tritech’s Genesis software package allows users to control multiple Tritech products from a single interface to streamline operations. The company has also made software development kits available for Windows and Linux operating systems to integrate into various platforms. The sonar’s design includes a custom-developed analog front-end solution with fully differential receiver channels, making it ideal for longer-range applications.
HiPer XRa is a GNSS receiver for surveying, mapping and construction applications. It can benefit a wide variety of users, including construction professionals, surveyors, geographic information systems (GIS) professionals, archeologists, engineering firms and more. The HiPer XR supports GPS, GLONASS, Galileo, BeiDou, IRNSS, QZSS and SBAS.
The new receiver has advanced Topcon Integrated Leveling Technology (TILT) compensation, featuring a calibration-free and magnetic interference-immune integrated IMU that provides up to 60° of tilt for precision measurements in challenging positions. It has signal integrity protection, anti-jamming and anti-spoofing capabilities. Through the myTopcon NOW! website, users can access online training materials, firmware updates and additional software resources.
Airborne Lidar System Ideal for coastline and river surveying
CoastalMapper is an airborne bathymetric lidar system for coastline and river surveying. The CoastalMapper can survey coastlines and rivers 250% faster than previous sensor models, according to Leica Geosystems.
It is suitable for various mapping applications, from assessing infrastructure resilience to monitoring river floods and conducting environmental investigations.
It features a high-performance bathymetric lidar module, a Leica TerrainMapper-3 topographic lidar and an imaging sensor, integrated into a compact and lightweight sensor head. This allows the CoastalMapper to capture up to 1 million bathymetric data points and 2 million topographic data points per second while providing high-resolution imagery with a 5-cm ground sampling distance at typical flying heights.
It integrates with Leica Geosystems’ airborne mapping workflows and offers cluster processing capabilities, allowing users to analyze large datasets and reduce the time from data collection to final deliverables. These outputs can include classified point clouds, digital terrain and surface models, and various imaging products.
Surveying Kit Streamlines base station and checkpoint setup
WingtraGROUND, a comprehensive survey kit, streamlines base station and checkpoint setup for on-site post-processing kinematic surveys with the WingtraONE Gen II, a vertical takeoff and landing UAV. The kit combines receivers, checkpoints and tools into a single, portable workflow.
The system integrates hardware components with a Wingtra tablet interface, which can help surveyors confirm correct receiver placement and avoid common errors associated with improper base station setup and inaccurate coordinates.
Wingtra receivers, equipped with Emlid Reach RS3 technology, provide accuracy within 2 cm, meeting high standards for aerial data validation. These receivers can also function independently for terrestrial surveys in real-time kinematic mode, including point collection and stakeout for various applications.
Galileo HAS-Enabled Receiver Offers positioning capabilities with 20 cm accuracy
The Geode GNS3H supports Galileo High Accuracy Service (HAS). It offers positioning capabilities with 20 cm accuracy worldwide without requiring additional infrastructure or subscriptions.
It is built to withstand tough conditions, making it ideal for demanding fieldwork. The device offers various accessories, including the Geode Grip, which combines the Geode with a data collection device of choice into a single handheld solution. A backpack strap kit and survey pole are also available to enhance mobility and flexibility in the field. The GNS3H can be used for surveying, agriculture, construction, forestry, mining and archaeology.
Expanded Mapping Portfolio 3D mapping technologies and more
Topcon Positioning Systems has become an authorized distributor of Pix4D’s photogrammetry software portfolio.
The partnership aims to enhance reality capture solutions across various industries, including surveying, mapping, utilities infrastructure, public safety, forensics, and architecture, engineering and construction.
The agreement streamlines the procurement process for end users by allowing them to access Pix4D’s advanced photogrammetry software solutions through Topcon’s global distribution network.
The GNSS real-time kinematic (RTK) 5 Click — a compact add-on board for high-precision positioning and navigation demands — features the UM980, an all-constellation multifrequency RTK positioning module from Unicore, with the advanced NebulasIV SoC for enhanced performance.
It supports Swift Navigation’s Skylark precise positioning service, multiple GNSS constellations and RTK positioning for centimeter-level accuracy. The board also features JamShield technology for robust performance in challenging environments, USB connectivity for easy configuration and visual status indicators for module status and GNSS signal reception.
It can be used for a variety of applications, including surveying and mapping, precision agriculture, UAVs, autonomous robots and autonomous driving.
Multi-Band GNSS Antenna Can operate in urban environments
Levity Series’ AHP24510 (L1/L2/L-Band) and AHP54510 (L1/L5/L-Band) directional patch antennas are designed to receive signals from GPS, Galileo, GLONASS and BeiDou satellite constellations.
These antennas offer faster and more accurate signal acquisition and lock, specifically in urban environments. The L-Band capability allows compatibility with high-precision GNSS correction services. The multi-band antennas offer integral redundancy to minimize satellite security blind spots and reduce energy consumption due to faster acquisition, requiring less system uptime to save power.
The Levity Series active antennas feature a 45 mm x 45 mm x 10 mm wide-band, dual-stacked patch design with a dual-feed, low noise amplifier, providing 28 dB to 29 dB gain and filtering. They operate with a maximum antenna VSWR of 1-to-1 from 1,207 MHz to 1,603 MHz, and the passive antenna efficiency ranges from 39.93% to 68.51% in the L1 band. These antennas use right-hand circular polarization to mitigate multi-path interference.
The Levity Series includes other multi-band products for high-precision applications, such as the HP24510A and HP54510A stacked-patch passive components, and the TFM.120A surface-mount front-end module, which covers the full multi-band GNSS spectrum including L-band. These antennas are suitable for various applications, including wearables, transportation, robotics, precision agriculture and autonomous vehicles.
The M9PLUS-HCT-A-SMA is an active multi-frequency GNSS antenna designed for high-accuracy applications. It supports L1/L2/L5 GPS, Galileo, Beidou and GLONASS bands, as well as L-band correction services. The antenna utilizes Maxtena’s proprietary Helicore technology, which offers advanced pattern control, polarization purity and efficiency in a compact form factor.
It integrates a pre-filter specifically engineered to mitigate LTE interference. This is crucial for maintaining signal integrity in environments with dense mobile communication networks, where LTE signals can overlap with GNSS frequencies. The pre-filter can effectively block out-of-band LTE signals, reducing intermodulation risks and ensuring clear GNSS signal reception.
The M9PLUS-HCT-A-SMA is built with rugged, IP67 automotive-grade components and includes an integrated SMA connector. It also features an O-ring for enhanced environmental sealing. Weighing only 24 grams, the antenna is ground plane-independent, making it versatile for various installations. It is particularly well-suited for GIS and RTK applications where high accuracy and reliability are crucial.
The MostaTech G321M is a three-axis fiber optic gyroscope (FOG) that offers high-precision navigation and orientation measurement capabilities. This advanced sensor features a data rate of 8 kHz.
Key features of the G321M include an input range of 400° per second, a bias RMS of 1° per hour and an angular random walk of 0.025 °/√h. Additionally, it has a power consumption of 2 W and an initialization time of 1 second. The G321M is designed with a compact form factor, making it suitable for various applications where size and weight are critical factors.
It is ideal for UAVs, robotics, borehole surveys, image stabilization, gimbal stabilization and underwater vehicles.
High-Precision Lidar Designed for precision applications
The TV1 Lite and the TV1 UAV systems are designed for various precision applications, such as mapping and data collection.
The TV1 Lite features TrueNav technology, a Hesai 32-channel laser scanner and a FLIR 5MP global shutter camera with a 90° field of view. It also includes one year of TV1 Lite Annual Processing with support and maintenance.
TV1 offers customization options, allowing users to choose from 26 MP, 45 MP or 61 MP cameras and various Trajectory Correction Service options.
Flight Control System With autopilot functionality
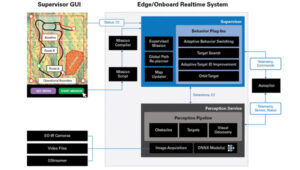
The Prism Supervisor software combines UAV autopilot flight control systems with AI-based observations processed in real time, aiming to enhance UAV operations.
The system provides a programming framework and software development kit for users to create custom mission scenarios. During flight, Prism Supervisor can adapt its autopilot functionality in real time, generating mission segments and flight plans as needed.
The software features a user-friendly graphic interface for mission planning, real-time visualization and execution. It supports Windows, Linux, macOS, iOS and Android.
Remote ID Receiver Enhances airspace awareness and UAV safety
RIDER is designed to enhance situational awareness by providing real-time detection of UAV activity in sensitive areas. It also seeks to provide a clear visibility of surrounding UAV operations to help avoid potential collisions and ensure safer flight experiences.
The device features a built-in industrial chip SIM that provides global coverage through LTE-M and NB-IoT, ensuring connectivity in various environments.
It operates effectively within a temperature range of -20 °C to +60 °C and is rated IP54 for dust and water resistance. The device complies with ASTM F3411-22A and ASD-STAN EN 4709-002 standards, making it suitable for regulatory environments.
The RIDER can detect signals from up to 5 km with its default antennas and up to 10 km when using an optional high-performance antenna. It is equipped with an internal cellular and Bluetooth antenna, along with an integrated GNSS antenna that provides precise positioning and timestamping capabilities. It supports multiple GNSS frequencies and utilizes Bluetooth and Wi-Fi technologies for Remote ID communications.
Streamlined BVLOS Operations For a variety of applications
The Sentaero 6 UAV is designed for advanced over-the-horizon operations beyond visual line of sight (OTH-BVLOS). It features built-in AI and machine learning capabilities for real-time data processing. The system can be used for surveying, mapping, inspection, asset monitoring and more.
Engineered to streamline operations, the Sentaero 6 offers more accurate and up-to-date intelligence on assets. Its onboard computer can processes data mid-flight.
Future developments will include swarm operations, enabling one human to control multiple UAVs simultaneously; fully remote operations and higher safety standards, such as a parachute for urban missions, according to Censys Technologies.
SBG Systems has significantly updated its Ellipse series sensors, incorporating the latest World Magnetic Model (WMM) to enhance accuracy and reliability in navigation applications. This upgrade is available for all Ellipse sensors, including first-generation models.
Designed for unmanned systems such as UAVs, UGVs and marine platforms, the Ellipse series comprises compact, high-precision inertial sensors. These devices feature built-in three-axis magnetometers that measure Earth’s magnetic field, crucial for accurate heading and positioning data.
Updated every five years, the WMM is a globally recognized mathematical representation of Earth’s magnetic field. The latest version, released in December 2024, ensures precise heading and positioning corrections to account for ongoing geomagnetic changes.
NDAA-Compliant UAV Now integrated with ArcGIS Flight
Esri now supports the Astro Max UAV in its ArcGIS Flight application. The Astro Max is the first Blue UAS-cleared and NDAA-compliant UAV to integrate with Esri’s platform.
The Astro Max, developed by Esri partner Freefly Systems, adheres to the security and performance standards set by the National Defense Authorization Act and the Defense Innovation Unit’s Blue UAS initiative. This industrial UAV is designed to enhance the capabilities of government and enterprise users utilizing ArcGIS Flight.
Autonomous Swarm Control Controls various autonomous platforms
The Autonomous Multi-Domain Operations Resiliency Platform for Heterogeneous Unmanned Swarms (AMORPHOUS) software features a single-user interface to operate thousands of autonomous assets simultaneously. Designed with an open architecture, this software enables the U.S. and allied militaries to control a mix of uncrewed platforms, payloads and systems.
AMORPHOUS includes an intuitive and distributed command-and-control interface to give operators the flexibility to conduct a wider array of intricate military missions. This collaborative autonomy at scale will provide warfighters with a decisive overmatch capability.
L3Harris is developing prototypes using the AMORPHOUS architecture on contracts for the U.S. Army and the Defense Innovation Unit. AMORPHOUS has demonstrated flexibility and interoperability by controlling multiple, separate assets across multiple vehicle types operating in different domains during government-managed tests.
AMORPHOUS supports decentralized decision-making, which enables individual, uncrewed assets to perform tasks autonomously and make real-time tactical decisions inside the network.
Advanced Counter-UAV Radar Multi-console radar control and display system
Cambridge Pixel has developed a radar control and display system for Weibel Scientific’s XENTA surveillance radar, which is designed for modern air defense and counter-unmanned aerial systems (C-UAS) applications.
The XENTA radar includes 3D target tracking, continuous target illumination and synthetic receiver beamforming. It is available in two configurations: the XENTA-M for short-range air defense and the XENTA-C for C-UAS operations.
The system is designed to work seamlessly with third-party command-and-control systems, enhancing operational efficiency.
Cambridge Pixel’s library of radar processing software allows users to develop a tailored radar controller specific to the XENTA radar’s requirements. Enhancements were made to existing functionalities, such as improved MIL-STD-2525 overlay graphics and support for dual-redundant operator consoles.
The XENTA radar system can detect small UAVs at distances exceeding 7 km and classify them beyond 5 km. This capability makes it suitable for various applications, including airport security, border control, critical infrastructure protection and event security.
The Pelican 2 agricultural spray UAV has an expanded 300-liter payload capacity and can cover up to 5.3 ha/hr.
It incorporates several technological enhancements designed to meet the demands of agriculture applications. The aircraft features an upgraded four-motor electric propulsion system, a wider 18-m spray swath and advanced lidar and radar systems for fully autonomous day-and-night spraying. These improvements aim to increase efficiency and precision in aerial application while reducing operational costs for farmers.
The Pelican 2’s airframe and structural components are constructed from carbon fiber composites, corrosion-resistant metallic components and 3D-printed assemblies.
Hexagon has finalized its acquisition of Septentrio NV. By integrating Septentrio’s GNSS platforms with Hexagon’s existing portfolio, the company aims to enhance access to high-accuracy and high-performance positioning technology designed for Size, Weight and Power (SWaP) efficiency.
According to Gordon Dale, President of Hexagon’s Autonomous Solutions division, the collaboration will enable the delivery of advanced solutions for autonomy and mission-critical applications across various industries.
The combined expertise of both companies is expected to accelerate the adoption of autonomous systems while addressing the needs of emerging sectors such as robotics, UAVs and other mission-critical technologies. Septentrio, headquartered in Leuven, Belgium, will maintain its existing business model of providing GNSS technology to a broad base of original equipment manufacturers.
SparkFun Electronics has introduced its first ultra-high-precision GNSS timing product, the SparkPNT GNSS Disciplined Oscillator (GNSSDO). Designed for applications requiring sub-nanosecond timing and frequency precision, the GNSSDO is built around Septentrio’s multi-constellation, multi-frequency, L1/L2/L5-ready mosaic-T module.
The device integrates Septentrio’s mosaic-T GNSS timing receiver, Espressif’s ESP32-WROVER processor and the SiTime SiT5358 disciplined 10 MHz oscillator on a single circuit board. It is housed in a custom extruded aluminum case with machined end panels and slotted flanges, making it suitable for installation in weatherproof enclosures or server racks.
The GNSSDO offers impressive timing precision. Its time pulse accuracy is 5 ns, which improves to under 1 ns with an optional subscription to Fugro AtomiChron via L-Band. Event accuracy is less than 20 nanoseconds.
To ensure reliability and security, the Septentrio mosaic-T module provides robust performance even under challenging conditions such as GNSS jamming or spoofing. The system’s multi-constellation and multi-frequency capabilities, combined with AIM+ technology, are designed to enhance resilience. Additionally, the integration of SiTime’s Super-TCXO ensures superior clock frequency stability and accuracy during GNSS outages.
SBG Systems has upgraded its inertial navigation systems — Ekinox, Apogee and Navsight— with new GNSS receiver options designed to offer greater flexibility while maintaining high precision and reliability.
Previously, SBG Systems integrated a triple-band GNSS receiver with RTK and Fugro Marinestar capabilities into its navigation solutions. The latest update introduces three additional GNSS receiver variants, each tailored to specific regional and application needs. These include:
Marinestar: This variant supports Fugro Marinestar, delivering precise point positioning (PPP) with centimeter-level accuracy via L-band corrections without requiring a base station. It is optimized for marine applications such as hydrographic surveys and dredging.
HAS Ready / NavIC: Designed for future compatibility, this variant includes Galileo E6 support for the upcoming Galileo High Accuracy Service (HAS), offering free decimeter-level PPP corrections globally. Additionally, it supports the Indian NavIC system, making it suitable for applications in urban environments, aviation and operations in India.
Centimeter-Level Augmentation Service(CLAS): Tailored for users in Japan, this variant utilizes QZSS L6 signals to provide free PPP corrections without external services. It is ideal for land and marine navigation in Japan.
All GNSS variants integrate seamlessly with SBG Systems’ antenna portfolio and Qinertia post-processing software. Users select the appropriate GNSS variant at purchase to match their operational requirements. These enhancements aim to provide versatile solutions across diverse industries while ensuring reliable performance.
The European Union Agency for the Space Programme (EUSPA) has awarded GMV a framework contract to advance the Galileo Reference Centre (GRC), a key facility for monitoring and evaluating the performance of the Galileo satellite navigation system. Located in Noordwijk, the Netherlands, the GRC independently assesses Galileo’s operations, signal quality, and user-level service performance and compares its performance with that of other GNSS.
The upcoming GRC V2 version will introduce real-time monitoring capabilities, enhancing EUSPA’s ability to oversee GNSS services. This evolution will support additional Galileo services, including:
Signal Authentication Service (SAS): Strengthening trust in Galileo signals.
Time Dissemination Service: Enabling precise synchronization for critical infrastructure.
Search and Rescue (SAR): Improving emergency response operations.
Emergency Warning Satellite Service (EWSS): Facilitating public alerts for natural disasters and emergencies.
Key operational improvements in GRC V2 include:
Enhanced monitoring using data from multiple institutions.
Real-time processing for faster user notifications.
Seamless system upgrades without disrupting operations.
Advanced cybersecurity measures integrated into a platform-as-a-service model.
The upgraded GRC is expected to be operational by 2026 without impacting ongoing functions.