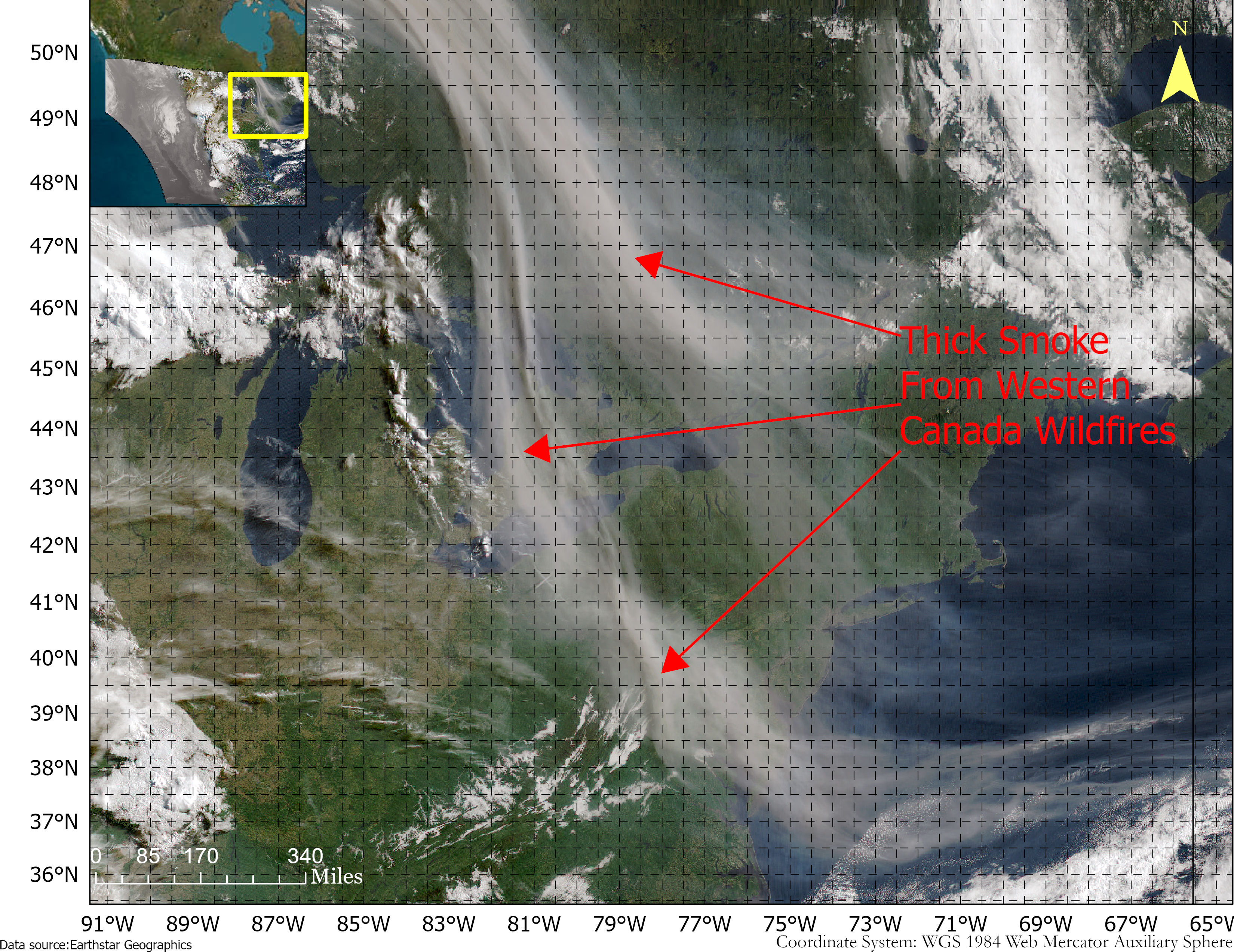
Smoke from the Canadian wildfires continues to pollute the air across the United States, mainly affecting cities in the northeast, including Pittsburgh, Chicago, Cleveland, Detroit and Buffalo.
According to the New York Times, in early June, the level of particulate matter in the air from smoke became so unhealthy that many U.S. cities set records. Visibility decreased in many cities as well, with the smoke creating an orange haze.
Most of the smoke can be attributed to several fires burning across Canada. Many of these fires were caused by lightning; however, with above-average temperatures and dry conditions, wildfires have been breaking out since May.
A storm system off the coast of Nova Scotia forced smoke from the fires southeast into the United States. (Image: NOAA)
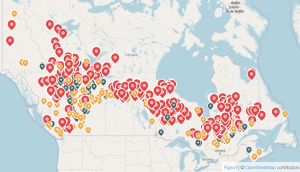
Based on data from the Canadian Interagency Forest Fire Centre, there are 480 active fires in Canada: 252 are out of control, 77 are being held in place, and 151 are under control.
The fires are mapped in the image below.
The red dots represent the out-of-control fires, the green dots are fires being held in place, and the yellow dots are fires that are under control. (Image: Screenshot of CIFFC wildfire map)
Understanding air quality importance
The Air Quality Index (AQI) measures the density of five pollutants: ground-level ozone, particulates, carbon monoxide, nitrogen dioxide, and sulfur dioxide. It was originally established by the Environmental Protection Agency to communicate the cleanliness of the air Americans are breathing every day.
The index runs from zero to 500 — the higher the number the more polluted the air is.
Effects of air pollution can range from mild symptoms, such as eye and throat irritation, to serious ones such as heart and respiratory issues. Pollution can cause inflammation of the lung tissue and increase the vulnerability to infections.
During wildfires, fine particles in the soot, ash and dust can fill the air.
The AQI identifies the concentration of particles smaller in diameter than 2.5 μM. When these particles are inhaled, the tiny specks can increase the risk of heart attacks, cancer, and respiratory infections — especially in children and older adults.
Below is an updated map of air quality from the U.S. AQI as of June 28.
The colors on the map range from yellow — which is unhealthy air quality — to purple, meaning the air quality is hazardous. (Image: AirNow.gov)
uAvionix has received Federal Communications Commission (FCC) approval, coordinated with the Federal Aviation Administration (FAA), to operate its SkyLink C-band command and control (C2) radios for beyond visual line of sight (BVLOS) operations at the Choctaw Nation of Oklahoma Emerging Technology test site.
The radios — operating on aviation-protected C-band frequencies — will be controlled by uAvionix’s SkyLine cloud-based C2 network solution that supports fleet management, network health monitoring, detect and avoid, and roaming between multiple radio networks and ground stations.
According to uAvionix, with the BVLOS Waiver, businesses looking to use aviation-protected C-band and other radio networks for assured control and non-payload communications can now develop, test and implement solutions for business initiatives such as package delivery and medical resupply.
With over 200,000 tribal members and more than 11,000 employees, the Choctaw Nation is the third largest Indian nation in the United States. It is developing an aviation test facility in southeastern Oklahoma that utilizes more than 44,600 acres of remote land it tribally owns to support the innovative research, development, test and evaluation of emerging manned and unmanned aerial system technologies in a safe and low-risk environment.
Interested businesses should contact the Choctaw Nation and uAvionix to support implementation and scaling of uncrewed aerial system operations with multiple C2 links including aviation protected C-band.
ComNav Technology has released the T20 palm real-time kinematic (RTK). The GNSS receiver with advanced technology is designed for surveying and mapping, GIS, marine, precision agriculture and machine control.
T20 is light, weighing in at 0.68 kg, and has low power consumption with 12 hours of battery life. It integrates functions such as a GNSS module, datalink module, 4G, 5.0 dual-mode Bluetooth, data memory system and more.
Powered by the SinoGNSS K8 high precision module, the T20 has 1,590 channels and can track all running and planned constellations including GPS, BDS, GLONASS, Galileo, QZSS and satellite-based augmentation systems. Additionally, the anti-interference algorithm enables the T20 to maintain accurate positioning and perform well in complex environments, providing surveyors with high-quality measurements.
The T20 is equipped with a third-generation inertial measurement unit from ComNav, which can be tilted and measured at an angle up to 60°. The T20 is also equipped with a U50 datalink module, which enables it to switch between base and rover.
The T20 is compatible with mainstream RTK receivers on the market.
A roundup of recent products in the GNSS and inertial positioning industry from the June 2023 issue of GPS World magazine.
SURVEYING
Survey Software Georeference raw lidar data
Georeferencer 2.5 featuring anyNAV software is suitable for survey applications. Users of Georeferencer 2.5 with the anyNAV feature enabled can boresight payloads and georeference lidar data using the user’s navigation data. The anyNAV software enables lidar surveyors to create accurate point clouds quickly. Georeferencer 2.5 now takes navigation data from third-party inertial navigation systems, which enables users to use that data to georeference raw lidar data from multiple sensor families. The resulting data can then be viewed in many point cloud viewer software packages. OxTS, oxts.com
Inertial Navigation Solution Designed to deliver accuracy in challenging environments
Ekinox Micro combines a high-performance MEMS tactical inertial sensor with a quad-constellation, dual-antenna GNSS receiver, making it suitable for mission-critical applications. The device includes pre-configured motion profiles for land, air and marine applications, enabling the sensor and algorithms to be tuned for maximum performance in any condition. The device is designed for ease of use and integration, with simple connectors, a web configuration interface, datalogger, Ethernet connectivity, a PTP server, a REST API for configuration, and multiple input and output formats. Ekinox Micro is compatible with real-time kinematic (RTK) solutions and based on a tactical 0.8°/h class inertial measurement unit calibrated across the entire operating temperature range. It features accuracy roll/pitch of 0.015°, accuracy heading of 0.035°, and accuracy position of 1.2 m without any corrections or 1 cm in RTK. The device also meets the MIL-STD-461, MIL-STD-1275, and MIL-STD-810 standards. SBG Systems, sbg-systems.com
Lidar Sensor High-performance airborne bathymetric solution for deep water surveying
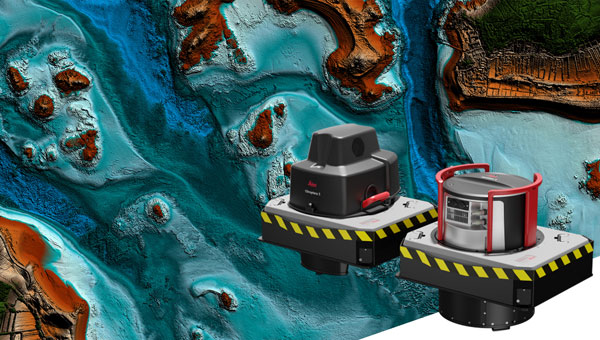
The HawkEye-5 increases survey efficiency by up to 25% compared to previous generations. The technology expands the capabilities of the Chiroptera-5 bathymetric lidar system, enhancing the productivity of applications such as nautical charting, environmental monitoring, and maritime surveillance in deep waters. The technology is designed to fit the Leica PAV100 gyro-stabilized mount, which isolates the sensor from unwanted aircraft movements — resulting in consistent data density and more efficient area coverage. The HawkEye-5 combined with the Chiroptera-5 features three lidar sensors, one four-band camera, and a QC camera to collect data from the seabed to land. Leica Geosystems, leica-geosystems.com
GNSS Receiver Complete with network RTK rover
The Sfaira One GNSS receiver is small and centimeter accurate. It provides users with an entry-level network real time kinematic (RTK) rover. Sfaira One is equipped with a GNSS module with 1,408 channels for GPS, BDS, GLONASS, Galileo and QZSS tracking — providing centimeter positioning in harsh environments. It also features advanced RTK and an anti-interference algorithm. The GNSS receiver connects via Bluetooth and can be configured to conduct surveying tasks on a smartphone. Additionally, Sfaira One supports SingularPad and SingularSurv software and is also compatible with mainstream field survey or GIS software. Sfaira One is IP65 dustproof and waterproof, which makes the receiver suitable for all weather conditions. It has a 4,800 mAh battery life with 16 hours working time and type-C interface that can be charged on-the-go with a power bank. SingularXYZ, singularxyz.com
MAPPING
Mobile Mapping Solution Built for large-scale infrastructure measurement and digital twin creation
The Pegasus TRK100 is small and light, making it easy to mount on any vehicle. The mobile mapping system features the same modular hardware approach that enables users to add more cameras to expand the range of use cases. With its advanced mapping capabilities, the Pegasus TRK100 enables GIS professionals to visualize and understand the location of assets to help make the right decisions, improve asset management, and support infrastructure building and maintenance. The Pegasus TRK100 combines artificial intelligence and a learning algorithm to enhance and optimize the clarity of points in post-processing for improved accuracy. The versatility of the Pegasus TRK100 suits a variety of applications in diverse industries, including telecommunications, utilities and road maintenance. Leica Geosystems, leica-geosystems.com
OEM
Photo:
Helix Antenna Series Suitable for unmanned system applications
HX-CUX012A is designed with an extremely low profile, making it suitable for integration into UAVs, surveying and monitoring devices. It reduces the overall weight of applications, enables multipath mitigation and more. HX-CUX005A is a solution for integrated helix antenna applications. It is designed with the integration of a GNSS antenna and Bluetooth/Wi-Fi antenna, enabling communication and navigation without mutual interference. HX-CH7609A is a low profile and small size housed helix antenna. It has comprehensive GNSS support including GPS, GLONASS, Galileo, BeiDou, as well as L-band correction services. HX-CH7609A features centimeter phase center repeatability and high gain at a low elevation. With signal filtering and multipath rejection, it provides reliable and stable GNSS signals. HX-CHX600A is a high-performance helix antenna that receives GPS, Galileo, BeiDou, GLONASS, as well as L-band signals. With 4.2 dBi high gain, it provides suitable tracking performance at a low elevation angle. Its low noise figure design reduces transmission interference and improves signal quality. Harxon, en.harxon.com
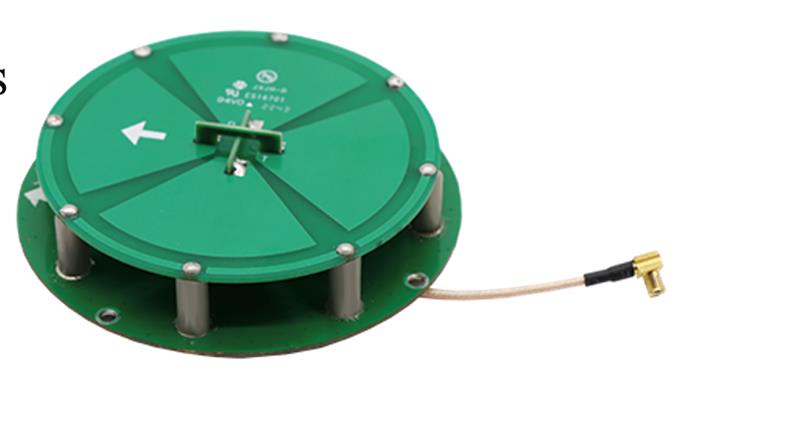
Helical Antenna Suitable for UAV applications
The HC990XF helical antenna is designed for precise positioning, covering the GPS/QZSS L1/L2/L5, QZSS L6, GLONASS G1/G2/G3, Galileo E1/E5a/E5b/E6, BeiDou B1/B2a/B2b/B3, and NavIC L5 frequency bands. This includes the satellite-based augmentation system (SBAS) available in the region of operation as well as L-band correction services. The HC990XF has a base diameter of 64 mm, is 37 mm tall and weighs 45 g. Its precision-tuned helical element provides full GNSS band coverage, suitable gain and axial ratio, and a tight phase center. The antenna base has an SMA (male) connector, three screw holes for secure attachment and an O-ring to waterproof the antenna connector. The HC990XF helical design does not require a ground plane, making it a suitable antenna for UAV applications. Tallysman Wireless, tallysman.com
Inertial Module For automotive uses
The ASM330LHB automotive-qualified MEMS inertial-sensing module provides accurate measurements for a wide variety of vehicle functions. With the dedicated software provided, ASM330LHB also addresses functional-safety applications up to ASIL B1. ASM330LHB contains a 3-axis digital accelerometer and 3-axis digital gyroscope that provides a six-channel synchronized output. The module’s high-accuracy inertial measurements are used to improve the precise positioning of a vehicle. The accelerometer and gyroscope maintain high stability over time and temperature, and have very low noise for an overall bias instability of 3°/hour. Specified over the extended temperature range, -40°C to 105°C, the ASM330LHB has multiple operating modes that let designers optimize the data-update rate and power consumption.
ASM330LHB can support advanced driver assistance systems or vehicle-to-everything communication, as well as help stabilize sensing systems such as radar, lidar and visual cameras, and assist semi-automated driving applications up to L2+. Additionally, ASM330LHB can be used to enable a variety of functionalities in the body of a vehicle. ASM330LHB was developed with the automotive functional-safety standard ISO 26262 — the ASIL B compatible software library has been certified independently by TÜV SÜD. By implementing dedicated safety mechanisms, including data integrity and accuracy, the library ensures compliance with ASIL B automotive systems.
With the companion software engine, the ASM330LHB supports the growing adoption of automotive systems that require safety integrity up to level B. The combination of two ASM330LHB sensor modules for fail-safe redundancy delivers resilient contextual data for driver-assistance applications such as lane centering, emergency braking, cruise assistance and semi-automated driving. ASM330LHB is AEC-Q100 qualified and in production now in a 2.5 mm x 3.0 mm 14-lead VFLGA package. STMicroelectronics, st.com
INS Built for automation applications
The AV200 is designed to give precise location data. It includes quad-constellation, dual-antenna, real-time kinematic (RTK) GNSS to provide users with position data as well as its temperature-calibrated, multi-core inertial measurement unit. These technologies give the AV200 position accuracy within 0.05 m, heading accuracy of 0.2°, and velocity accuracy of 0.2 km/h. The AV200 is built using the same technology that is commonly used for NCAP test validation, which has become the preferred technology for OEMs globally to test vehicles in both test-track and real-world scenarios. OxTS, oxts.com
Reference System For attitude and heading
AHRS-II-P is an enhanced, high-performance strapdown system that determines absolute orientation (heading, pitch and roll) for any mounted device. The AHRS-II-P can determine orientation for both motionless and dynamic applications. The AHRS-II-P contains a tactical-grade inertial measurement unit (IMU) consisting of three high-precision MEMS accelerometers, three advanced MEMS gyroscopes and a high-precision, gyro-compensated, embedded fluxgate compass. It also uses 8 mm fluxgate magnetometers. This device is suitable for a variety of devices such as UAVs, antennas, ships and robotic devices.
Inertial Labs, inertiallabs.com
GNSS Receiver For accurate positioning and heading
As a high-precision integrated GNSS positioning and heading receiver, the A200 can track all existing and planned constellations — including GPS, BSD, GLONASS, Galileo, QZSS and SBAS — providing high-precision positioning and heading data for users. A200 is designed specifically for precision agriculture, machine control, fleet management, robot and other industries. The A200 is equipped with a K823 GNSS module. It also features 1,226 channels. The A200’s third generation IMU delivers fast initialization and ensures the output of heading during temporary GNSS signal loss. The built-in data link has low power consumption and a long working range. It also can be upgraded to a super-long-range data link module. ComNav Technology, comnavtech.com
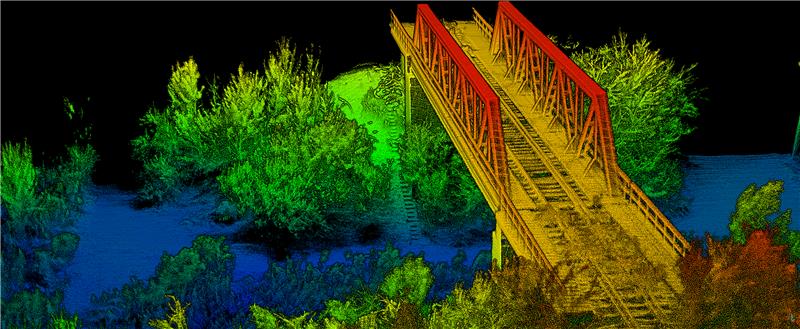
RIEGL Laser Measurement Systems GmbH and Schiebel have successfully completed the integration of a laser scanning system, the RIEGL VQ-840-G topo-bathymetric lidar sensor, on the Schiebel CAMCOPTER S-100 UAS. The RIEGL VQ-840-G, combined with the technical specifications and performance of the CAMCOPTER S-100 UAS, enables an efficient and secure way for surveying shallow waters, where monitoring from boats becomes a challenge.
The applications of airborne lidar bathymetry include the mapping of coastlines and riverbanks, as well as the monitoring of natural habitats, water reservoirs and hydraulic engineering applications.
In a single data acquisition mission, data below and above the water surface are covered.
Image: RIEGL
Additionally, the topographic laser scanners RIEGL VUX-1UAV/-LR and VUX-12023 can be integrated in the front payload bay of the CAMCOPTER S-100.
The VQ-840-G topo-bathymetric laser scanner is designed for use in a variety of maritime and hydrographic environments. The lidar sensor payload system is controlled remotely via a data link, which was crucial for the integration into the S-100 system.
The scanner is controlled by using the onboard software RiACQUIRE-Embedded via the available data link; data acquisition and laser safety are also monitored. Once the survey is completed, the raw data seamlessly integrates into the RIEGL data processing workflow.
GNSS interface board – mosaic. (Image: Point One Navigation)
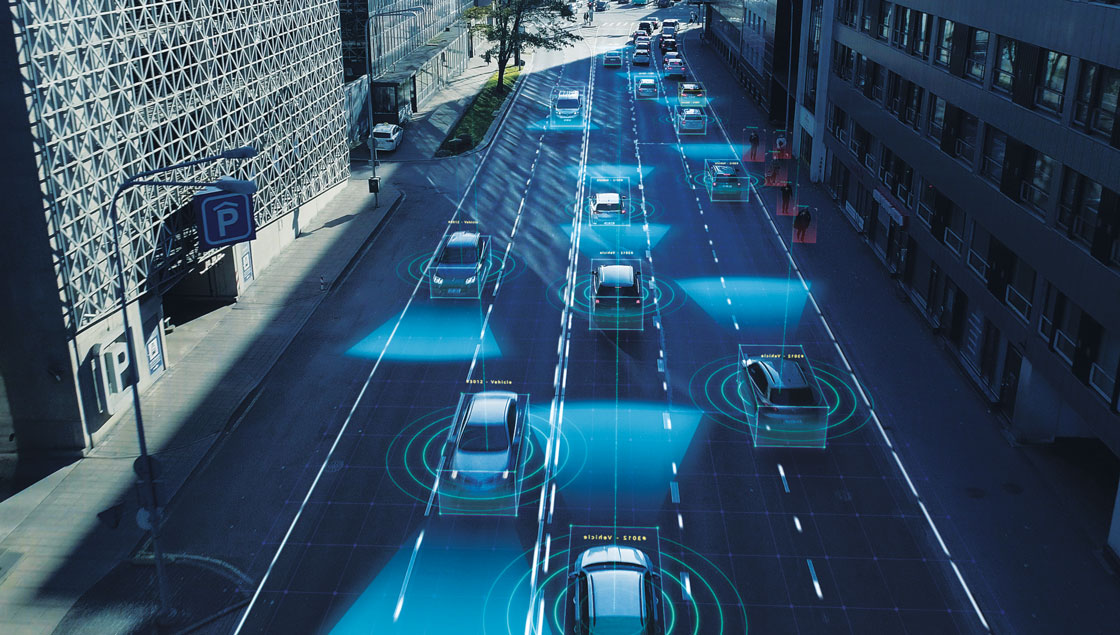
Point One Navigation and Septentrio have partnered to expand upon the companies’ precision location solutions throughout Western Europe. The new developer compatibility is suitable for demanding applications, including industrial autonomy, precision agriculture, logistics and delivery, robots and autonomous vehicles.
Point One’s Polaris is a correction network that enables high-precision GPS and computer vision-based localization. Polaris has recently extended coverage to now include Western Europe, further expanding the reach of the network. This solution is powered by Septentrio’s GNSS receivers, including the mosaic compact multi-constellation GNSS receiver.
The mosaic module — a multi-band, multi-constellation receiver in a low-power surface-mount module with a wide array of interfaces — is designed for mass market applications such as robotic and autonomous vehicle guidance systems. The module integrates GNSS and RF ASIC technology, as well as the robust positioning engine from Septentrio.
Septentrio real-time kinematic (RTK) receivers can be used directly with Polaris to provide centimeter-level accuracy in seconds.
This technology is complemented by Point One’s FusionEngine software, which further integrates cameras and additional sensors to achieve the desired level of precision — even in the complete absence of satellite signals.
FusionEngine has the accuracy and the resilience to inclement weather required by Level 2 applications, such as highway lane keeping and V2X, while offering the robustness necessary for mission-critical Level 4 and Level 5 robotaxi and full autonomy applications.
At the Joint Navigation Conference in San Diego, BAE Systems unveiled NavGuide, an assured-positioning, navigation and timing (A-PNT) device featuring M-code GPS technology. NavGuide is a field-installable replacement to the defense advanced GPS receiver (DAGR), designed for quick integration into current DAGR mounts and accessories without mission interruption.
NavGuide features a 3 in, full-color, graphical user interface for dismounted soldiers, and easily integrates with existing mounted platforms and systems. The device leverages the advanced M-code GPS signal with enhanced jamming and spoofing protection.
NavGuide is portable, versatile, and precise, and enables vehicular, handheld, sensor, and gun laying applications that enable the military to defeat adversaries in a variety of challenging threat environments.
Harxon has released two high-precision GNSS antennas suitable for robotic lawn mowers.
The HX-CSX014A is a high gain, low profile and compact antenna with a new structure that simplifies integration into lawn mowers and minimizes the overall machine dimension. It features small size, high sensitivity and low power consumption.
The HX-CSX231A, is a ready-to-use GNSS antenna with a highly reliable structure that makes it small and lightweight. It exhibits 4.5 dBi high gain performance with ultra-low signal loss. It also delivers wide beam width that covers wide frequencies with high marginal gain, a perfect option in complex environments.
Additionally, the HX-CSX231A’s advanced LNA features improved signal filtering, out-of-band rejection, restrained unwanted electromagnetic interferences and a strong multi-path reduction capacity.
To learn more about Harxon high precision GNSS solutions for lawn mowers, click here.
OceanGate. (Credit: Screenshot of NBC news coverage)
On June 17, an OceanGate Expedition Titan submersible launched off the coast of Newfoundland, Canada, carrying five passengers to the bottom of the Atlantic Ocean to explore the infamous R.M.S. Titanic shipwreck. The U.S. Coast Guard said that the submersible lost contact with the surface vessel about an hour and 45 minutes after the launch and has not been in contact since.
The submersible can support life for 96 hours. As of the afternoon of June 20, it had 40 hours of oxygen left and U.S. and Canadian agencies were still searching for it.
The Titan submersible explained
According to the OceanGate website, the Titan is “a Cyclops-class manned submersible designed to take five people to depths of 4,000 [m] (13,123 [ft]) for site survey and inspection, research and data collection, film and media production, and deep-sea testing of hardware and software.” The Titan is equipped with an inertial navigation system (INS), an ultra-short base line acoustic positioning system, a robotics laser scanner, a Teledyne 2D sonar and more.
While it is equipped with an INS, the Titan relies on messages from a surface ship to guide the submersible to the shipwreck. The submersible and surface vessel rely on Elon Musk’s Starlink satellites for communication.
A part of the Titan worth mentioning, the crew is sealed inside and bolts are applied to the outside — needing an external crew to remove them upon surfacing.
Foreshadowing
The New York Postreported, in 2022, that an OceanGate Expedition to the Titanic lost contact for more than two hours and never found the wreck.
Aboard the submersible was a CBS correspondent, David Pogue, who was filming a segment for CBS Sunday Morning. He tweeted about the incident.
There are 18 planned expeditions to the Titanic with OcenGate Expeditions to survey the shipwreck, collect data, and document high-resolution images and videos.
The entire trip to the Titanic wreck site takes 8 days, and one dive can take up to 10 hours. The expedition is comprised of five legs.
Septentrio’s compact GNSS timing module, mosaic-T, now supports the AtomiChron timing service from Fugro. The mosaic-T module already includes several layers of security against GNSS jamming and spoofing with AIM+ integrated technology and OSNMA Galileo authentication; however, AtomiChron further strengthens the anti-spoofing security of the mosaic-T receiver by offering navigation message authentication on all four major GNSS constellations.
Fugro AtomiChron includes navigation message authentication, which ensures timing resilience through reception of only genuine GNSS signals. The AtomiChron eliminates time drift caused by clocks counting time at slightly different rates. This achieves sub-nanosecond accuracy and provides extreme stability that surpasses current precision frequency standards. This is a lightweight and scalable solution, which removes the need for atomic clocks in critical infrastructure.
The mosaic-T delivers accurate timing with multi-frequency, multi-constellation GNSS technology and offers dedicated timing features and inputs for time and clock synchronization. AtomiChron capability can be obtained via a software upgrade for new receivers or for receivers which are already operational in the field.
The AtomiChron service is optional and can be activated through Fugro. To find out more about mosaic-T or the secure positioning receivers from Septentrio use the Product Finder tool or contact the Septentrio team.
CHC Navigation has released the C5 and C30 orthographic and oblique cameras for aerial surveys. The systems are designed to provide high-quality imaging solutions for photogrammetric applications and to complement lidar survey data.
The C5 camera is an efficient and lightweight system for aerial surveys, weighing 290 g for increased flight endurance. Its compact size of 75 mm x 63.5 mm x 102.5 mm allows easy integration into UAVs. The C30 camera’s weight is 600 g with a size of 110mm x 108 mm x 85 mm. The C30 is also designed for aerial surveying.
The C5 and C30 cameras’ universal installation design makes them compatible with a wide range of fixed-wing and rotor UAV platforms. Both cameras are supported by the CHCNAV’s BB4 Mini and P330 Pro UAVs as well as the DJI’s M300 RTK.
The Alphaport (the A-type hardware interface) enables the C5 and C30 to be easily mounted into various UAVs and converted into the DJI Skyport connector for extended compatibility.
The C5 and C30 cameras give maximum flexibility for photogrammetric applications. They can be used independently on real-time kinematic-enabled UAVs to capture high-resolution imagery or installed directly on the CHCNAV’s lidar series to colorize point cloud data. This feature allows seamless imagery and lidar data integration for a more complete view of the surveyed area.
GNSS researchers presented hundreds of papers at the 2022 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 19–23, 2022 in Denver, Colorado, and virtually. The following four papers focused on autonomous applications in transportation. The papers are available here.
Addressing integrity monitoring of autonomous navigation
There are critical issues for the integrity monitoring of autonomous navigation applications, which include an adequate uncertainty budget in the observation domain, redundancy for the determination of the navigational states, and the capability of fault detection and exclusion.
Several aspects are addressed in the paper, including how to: determine interval bounds to handle GNSS multipath effects in urban environments, realize fault detection and exclusion based on constraint satisfaction and set membership, and improve the detector using weighting models.
The authors of the paper aim to contribute to the alternative integrity approach based on interval and set representations for bounding and propagating system uncertainty. Simulated and real-world experiments are carried out to demonstrate the feasibility of the authors’ proposed methods.
The authors note that statistical evaluation of integrity will not always suffice due to the presence of remaining systematic uncertainty, but state the alternative integrity approach will contribute to future autonomous navigation applications.
Su, Jingyao; Schön, Steffen; “Advances in Deterministic Approaches for Bounding Uncertainty and Integrity Monitoring of Autonomous Navigation.”
Estimation and reference systems in automation
For a high level of automation, estimation is crucial, and to achieve a full and reliable navigation evaluation, a trustable reference system needs to be developed.
Although the presence of a reference system and of an inertial measurement unit with GNSS through the multi-sensor fusion scheme was integrated, in GNSS-denied or challenging environment the navigation solution could not be accurately estimated and still needs to be fixed.
The authors of the paper propose new strategies to better estimate the lidar-based position uncertainty and to update the reference system.
The first strategy proposed involves determining the appropriate position error covariance matrix, based on the Hessian matrix and the scale of covariance obtained from a normal distribution transform (NDT) scan matching technique and the geometric dilution of precision computed from the distribution of point cloud segments in each scan.
In the second strategy proposed in the paper, the updated reference system was post-processed according to the loosely coupled INS/GNSS/NDT integration scheme with a forward and backward smoothing process.
The results of the proposed strategies indicated that the updated reference system provides more reliable navigation estimation compared to an existing reference system from commercial software and can be used for accurate evaluation of positioning, navigation and timing with automated vehicle applications.
Srinara, Surachet; Chiu, Yu-Ting; “Adaptive Covariance Estimation of Lidar-Based Positioning Error for Multi-Sensor Fusion Scheme with Autonomous Vehicular Navigation System.”
Evaluating TerraStar-X
GNSS performance using typical, low-cost GNSS devices in vehicles is not enough to achieve the positioning and availability needed for lane-level accuracy on autonomous vehicles. The antenna and receiver hardware available in standard vehicles limits the position accuracy and convergence performance. These limitations make the positioning more susceptible to error sources such as receiver multipath, noise, carrier tracking and stability.
GNSS correction services with additional design considerations and sophisticated algorithms are needed to work within the constraints of automotive-grade GNSS devices to achieve the performance required for lane-level positioning.
TerraStar X technology from NovAtel enables these applications. It includes an orbit and clock determination system (OCDS), which produces a set of corrections, precise satellite orbits and clocks, and satellite-specific biases for individual signals augmented by the computation of additional regional corrections.
The authors of the paper outline the design and performance of the combined OCDS and regional correction system. They demonstrate the performance of the TerraStar X technology across a variety of applications.
The addition of regional corrections enables automotive and mass-market applications to achieve in-lane positioning in seconds, using any dual-frequency, dual-constellation GNSS hardware. The result is software that provides a continuous stream of multi-constellation, multi-frequency GNSS corrections — enabling a correction service that makes the affordable GNSS device ecosystem possible.
Regional corrections also improve the performance of survey-grade GNSS receivers.
Mervart, Leos; Lukes, Zdenek; Alves, Paul; “TerraStar X Technology: Design of GNSS Corrections for Instantaneous Lane-Level Accuracy on Large Scale Connected Vehicles and Devices.”
Solving the localization problem in autonomous driving
The localization problem in autonomous driving imposes two criteria on the navigation solution: accuracy and reliability or integrity. According to the authors of this paper, solving the localization problem is a key requirement to enabling the development of autonomous platforms.
This paper presents AUTO, a real-time integrated navigation system that tightly integrates INS, GNSS-RTK, odometer, and multiple radars sensors with high-definition maps to achieve a high-rate, accurate, continuous, and reliable navigation solution. It also shows how AUTO leverages a tight integration of imaging radars with other traditional sensors to provide a robust navigation solution with corresponding estimates of the uncertainty.
The AUTO solution was tested in a variety of environments and locations, including a range of conditions such as winter weather, to assure the robustness and reliability required by autonomous applications.
The results demonstrate the lane level accuracy of the solution in a variety of challenging urban and downtown environments. Additionally, the tight integration enables the determination of protection levels to describe upper bounds on the uncertainty.
The results in the paper are illustrated using a Stanford Diagram, along with a user-defined alert limit to describe the solution integrity and availability. The proposed algorithm uses a map matching technique between the imaging radar data and a globally referenced high-definition map to better estimate the solution uncertainty and protection levels.
AUTO’s tightly integrated approach to integrity monitoring means uncertainties and protection levels can be determined even in areas where the system may experience extended periods of GNSS unavailability.
Krupity, Dylan; Chan, Billy; Ali, Abdelrahman; Salib, Abanob; Georgy, Jacques; Goodall, Christopher; “Integrity Monitoring and Uncertainty Estimation with AUTO’s Non-linear Integration of Multiple Imaging Radars and INS/GNSS for Autonomous Vehicles and Robots.”