Landscape of Badwater Basin salt flats, with halite textures under a vibrant pink sky during sunset or sunrise at Death Valley National Park. (Photo: StephenBridger / iStock / Getty Images Plus / Getty Images)
The U.S. Geological Survey (USGS) has commissioned Woolpert to collect Quality Level 1 lidar data and conduct ground control surveys throughout Southern California in support of the 3D Elevation Program (3DEP) and The National Map.
Overseen by the USGS National Geospatial Program, 3DEP provides the nation’s first comprehensive, high-resolution topographic elevation data integrated into The National Map. The data will be accessible to local, state and national agencies to consider when making decisions that affect the immediate safety of life, property and the environment, as well as for long-term infrastructure planning.
Woolpert will collect roughly 60,000 km2 of aerial lidar data throughout Inyo County, California, including parts of the Mojave Desert and Death Valley National Park, using a Leica TerrainMapper. QL1 data are collected at eight points per square meter.
“Woolpert has had the honor of supporting USGS’ 3D Elevation Program since its launch nearly a decade ago,” said John Gerhard, Woolpert vice president and program director. “Critical decisions that depend on accurate and available elevation data are being made every day, and we are incredibly proud to continue our support for the U.S. Geological Survey and its commitment to completing the nation’s first-ever baseline of consistent high-resolution elevation data.”
Gerhard added that the data acquired for this project will also support the USGS 3D Hydrography Program (3DHP). The project is underway, and data is expected to be acquired by fall 2024.
uAvionix has successfully installed and approved its surface situational awareness systems at two major U.S. airports: Indianapolis International Airport (IND) and Austin-Bergstrom International Airport (AUS). Developed in collaboration with Capital Sciences, the systems have passed the Service Acceptance Test (SAT) and will be operational for Air Traffic Control (ATC) starting June 30, 2024.
“This milestone marks the first approvals under the Federal Aviation Administration (FAA) Surface Awareness Initiative (SAI), part of a broader effort to enhance runway safety across the nation,” said Christian Ramsey, chief commercial officer for uAvionix.
The uAvionix systems use the Automatic Dependent Surveillance-Broadcast (ADS-B) service called FlightLine, which offers controllers real-time, precise depictions of aircraft and vehicles on the airport surface. This technology seeks to improve situational awareness and reduce the risk of runway incursions.
The delivery of the FlightLine systems to IND and AUS was completed and accepted within a 90-day timeframe, thanks to close collaboration with the FAA, National Air Traffic Control Association (NATCA), Indianapolis Airport Authority and AUS.
Each airport also installed several of uAvionix’s VTU-20 ADS-B Vehicle Movement Area Transmitters (VMATs) on airport vehicles. The VTU-20 is an FAA-approved system that allows vehicles operating on runways and taxiways to be electronically seen by the tower and aircraft equipped with ADS-B In technologies, further reducing the risk of runway incursions.
Following the success of these implementations, uAvionix will continue working with the FAA to expand the capability to other airports nationwide.
Key benefits of the enhanced system include:
Improved real-time tracking of aircraft and vehicles on the airfield.
Increased safety and efficiency in all weather conditions.
Decreased risk of runway incursions due to timely and accurate data.
From May 14 to 16, more than 1,400 attendees gathered at the Huntington Convention Center of Cleveland, Ohio for Trimble’s Innovate 2024 User Conference.
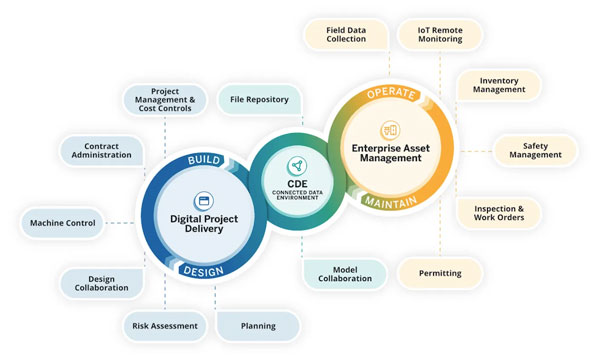
At the conference, Trimble announced its upcoming asset lifecycle management suite, Trimble Unity. The software suite offers comprehensive capabilities that enable owners to efficiently plan, design, build, operate and maintain their assets.
Trimble Unity provides an end-to-end solution that connects teams across all lifecycle phases, giving them access to critical data to make decisions. From designers, engineers and contractors to asset managers, inspection and maintenance crews, Trimble Unity offers all stakeholders visibility to reliable data across digital workflows that help foster collaboration, improve project outcomes and reduce the total costs of asset ownership.
Trimble Unity capabilities includes:
Trimble Unity Construct: A cloud-based construction project and program management capability that provides insights to improve process control and reduce cycle times. It is powered by Trimble e-Builder.
Trimble Unity Maintain: An enterprise asset management capability that streamlines work activity, planning and analysis to optimize resource allocation and infrastructure reinvestment. It is powered by Trimble Cityworks AMS, Trimble AgileAssets and Trimble Unity Work Management.
Trimble Unity Permit: A permitting, land management and licensing capability for streamlining public and back-office operations required to manage permits, licenses, right-of-way and code enforcement. It is powered by Trimble Cityworks PLL.
Trimble Connect: A connected data environment that unifies asset data in files, native file formats and 3D modes to streamline accessibility and collaboration.
In addition, Trimble Unity includes Trimble Unity Field, an all-in-one mobile application enabling field workers to design, build and maintain assets more efficiently, leading to improved productivity, reduced technology costs and improved community confidence.
GPS World met with Senior Vice President for Trimble’s Owner and Public Sector, Cyndee Hoagland, for an exclusive interview about the new product suite, how GIS plays a pivotal role in the asset management lifecycle and more.
Photo: Trimble
What sectors can benefit from this new product suite?
For the public sector side, federal, state and local governments. Think cities, municipalities, state departments of transportation (DOTs), airports and transit authorities. For the private sector, healthcare facilities and universities.
Is Trimble adding any new capabilities to the applications within the suite?
We added a GIS capability to e-Builder along with Trimble Unity Field, so the mobile application of e-Builder is new. We did not have a capability for location-based information within the application itself, but it is now included, which is the added GIS capability.
How do data strategy and GIS play a role?
Most of our users on the enterprise asset management side are GIS-centric, having GIS and GPS experience. They recognize and understand the value of location data combined with asset data. For example, it is so much better for an inspector to know the location of bolts that need to be repaired before the work begins.
Additionally, from a GIS perspective, if you are thinking about the GPS elements, and location and spatial data relative to an asset from the planning stage, through design and construction all the way to operation and maintenance, that data can be used to more efficiently operate and maintain the asset over its lifecycle. This asset lifecycle management approach allows the owner to reduce their total cost of ownership for that asset by as much as 40%.
Do you have an example?
Let’s say a bridge costs $1 million to plan, design and construct. Historically, $3 million would then be spent on operations and maintenance across the bridge’s service life, bringing the total cost of ownership of the bridge to $4 million. However, using an asset lifecycle management approach, owners can reduce that $4 million cost by up to 40 percent, saving $1,600,000 on the total cost of ownership of that bridge.
These enormous savings are possible because owners can track the location, condition and attributes of the bridge throughout the asset lifecycle and use that information to make better decisions for managing the asset. Owners can access information such as the location of the bridge, the type of asphalt used to build it, the geometry of all the components that create that bridge and more. All that asset-specific information is available in a GIS geolocated model, which is highly valuable not just for the owner, but for the design and contractor teams along the entire asset lifecycle.
Are there benefits of using a mobile mapping platform to collect data as opposed to using a UAV?
They serve different purposes. UAVs go up in the air at key points in a project to give owners an update on the project performance and how much is getting completed.
Another way of capturing rich asset data quickly is mobile mapping and terrestrial laser scanning. What you will see, for example, is that a state DOT will have to provide information to the Federal Highway Administration (FHWA) relative to all their lane miles. In large scale projects, a vehicle-mounted mobile mapping system can be used to capture highly accurate and immersive asset data at highway speed. That data will then go into an asset management system, where it can help users prioritize where the road repairs need to take place.
Will artificial intelligence (AI) be integrated into this suite in the future?
AI is already being used today to transform large amounts of real-world data into information. If an owner has collected data to inspect a bridge, for example, the highly accurate and rich data from mobile mapping and UAV systems can show an owner where exactly repairs are needed. The datasets are, however, extremely large, and AI built into processing and analysis software can help reduce tedious tasks, such as extracting features. This streamlined analysis of the data helps to inform owners on how to best manage and maintain their assets.
The key capabilities of the Trimble Unity Asset Lifecycle Management Suite will be available beginning in June 2024.
Trimble has introduced the Trimble R980 GNSS system, the newest addition to its GNSS receiver portfolio. The R980 features communication capabilities to support uninterrupted field operations.
The Trimble R980 can be used for land surveying, transportation infrastructure, construction, energy, oil and gas, utilities and mining projects. It features Trimble’s ProPoint GNSS positioning engine and inertial measurement unit (IMU)-based tilt compensation using Trimble TIP technology. These features make it suitable for dense urban environments and under tree canopy, removing the need to level the pole when capturing data points.
The R980’s communication capabilities include a dual-band UHF radio and an integrated worldwide LTE modem for receiving corrections from a local base station or VRS network. Able to operate on 450 MHz, 900 MHz or LTE bands, users have flexibility in how they receive and transmit RTK corrections. It operates in both 450 MHz and 900 MHz bands, allowing for interoperability with a range of existing industry solutions.
The R980 also supports the Trimble Internet Base Station Service (IBSS) for streaming RTK corrections using Trimble Access field software for connected workflows.
A 12-month subscription to Trimble CenterPoint RTX real-time corrections, delivered via satellite or internet, is included on new R980 receivers. This provides reliability without the need for a local base station or VRS network, the company says. The service provides centimeter-level corrections and is complemented by the Trimble xFill correction service that extends RTK positioning during signal interruptions.
The receiver includes Trimble IonoGuard technology, which mitigates ionospheric disturbances for RTK GNSS and Trimble Everest Plus for multipath mitigation performance. IonoGuard technology improves positioning availability in periods of increased solar activity, such as the recent G5 geomagnetic storms that occurred around the world.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Songs for the Cows
Photo: SWNS Media Group
Farmers are controlling cows with a GNSS-based tracking system that plays “Waltzing Matilda” when they get too close to a virtual fence. Blue Carbon Farming in Somerset, England, has begun working with the Wildlife and Wetlands Trust (WWT) to allow cattle to graze in wetlands and salt marshes for the first time in 30 years. Farmers can now use the Nofence app and collars to track where the cows are and warn them away from danger with music. If a cow gets near the virtual fence, a boundary determined by the farmers, its collar will play the tune to warn it away from the area.
Robotic Dogs on a Mission
Photo: BMW
BMW is using a four-legged robotic dog to gather data for a digital twin at its Hams Hall engine production plant in the United Kingdom. The robot – a Boston Dynamics Spot model, which BMW has renamed Spotto – also will act as a watchdog and assist in other tasks at the site’s facilities. The autonomous robot is equipped with visual, thermal and acoustic sensors. The Hams Hall digital twin operates on three levels. On the first level, the twin generates 3D representations of the plant. The mobile robot feeds data into the second level – a data layer that also receives information from the site’s production facilities and IT systems. On the third level – the application level – programs sort the collected data, which personnel use for quality assurance and production planning purposes.
Keep Your Hands on the Wheel
Photo: Tesla
The U.S. Department of Justice has launched an investigation into Tesla’s Autopilot and Full Self-Driving (FSD) systems. Tesla is under the microscope of U.S. federal prosecutors, as well as the U.S. National Highway Traffic Safety Administration (NHTSA), who want Tesla to share more information related to its autopilot system after crashes continued occurring despite a December recall of more than 2 million vehicles. The investigation focuses on Tesla’s Autopilot system and the more advanced Full Self-Driving package, which the company has been selling as an optional add-on. Neither system can fully automate the driving process without human supervision, a point of contention that has raised questions about the accuracy of Tesla’s promotional materials.
Mass Coral Bleaching
Photo: Rainer von Brandis / iStock / Getty Images Plus / Getty Images
The Australian Institute of Marine Science (AIMS), in collaboration with the Great Barrier Reef Marine Park Authority, has observed extensive coral bleaching caused by elevated sea temperatures during aerial and in-water surveys of the reef. This information confirms that a mass coral bleaching event is taking place on the Great Barrier Reef, which is the fifth such event since 2016. The aerial surveys have so far covered almost two-thirds of the Great Barrier Reef Marine Park.
SandboxAQ has released AQNav, designed for navigation across air, land and sea when GPS signals are jammed or unavailable.
As of June 2024, AQNav has logged more than 200 flight hours and 40 sorties across multiple regions of the world on four different aircraft types, ranging in size from single-engine planes to large military transport aircraft.
AQNav is a geomagnetic navigation system that uses proprietary artificial intelligence (AI) algorithms, powerful quantum sensors and the Earth’s crustal magnetic field. The system seeks to provide an un-jammable, all-weather, terrain-agnostic, real-time navigation solution in situations where GPS signals are unavailable, denied or spoofed.
The system uses extremely sensitive quantum magnetometers to acquire data from Earth’s crustal magnetic field, which exhibits geographically unique patterns – similar to a human fingerprint. AQNav uses AI algorithms to compare this data against known magnetic maps, allowing the system to quickly and accurately find its position. Due to the high sensitivity of quantum sensors, AI algorithms are applied to improve the signal-to-noise ratio, removing any mechanical, electrical or other interference that would impact the system’s ability to acquire its location.
It is available globally and can be used in air, land and sea applications. The system does not rely on visual ground features or satellite transmissions to function and is not affected by weather conditions.
AQNav operates at room temperature, requires no shielding and has a small form factor that can be integrated into a wide variety of platforms, from multi-engine airliners to UAVs. Its passive technology emits no electronic signals, which reduces the aircraft’s detectability.
AQNav seeks to increase useful navigation for aircraft navigating within the frameworks of regulatory bodies such as the International Civil Aviation Organization and the Federal Aviation Administration (FAA). SandboxAQ and its partners are continuing to explore a broad range of use cases for both commercial and defense applications.
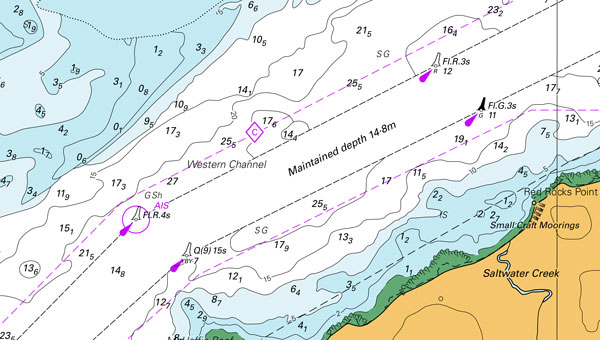
Teledyne Geospatial has launched the CARIS AutoChart, a nautical chart production solution.
Traditionally, the production of nautical paper charts has been labor-intensive and time-consuming. It often involved challenges related to manual data entry, complex chart formatting and the integration of various data sources. Recognizing the need for a modern, technology-driven approach, CARIS AutoChart is a comprehensive software solution tailored specifically to the needs of nautical chart producers.
The solution can automatically generate charts in PDF/TIF from ENC data. Users canseamlessly import data from ENC files to create comprehensive and up-to-date nautical charts in PDF and/or TIFF format. CARIS AutoChart can generate chart templates from existing chart portfolios maintained with CARIS paper chart composer or CARIS HPD paper chart editor.
The software solution is designed to be flexible and scalable, accommodating the unique needs of chart production facilities of all sizes. It can be used by hydrographic offices, port or waterways authorities.
HERE Technologies has launched its Fleet Optimization software package, designed to enhance the efficiency and scalability of fleet management operations.
The Fleet Optimization package aims to meet the needs of the transportation and logistics industry. It offers location-based features using HERE’s artificial intelligence (AI) to tackle the complexities of routing operations for commercial fleets.
The package is a robust set of location-based application programming interfaces (APIs). The key components and features of the HERE Fleet Optimization package include:
HERE Tour Planning uses map content and complex routing scenarios that consider real-time and historical traffic, alongside vehicle and road restrictions, to provide optimal deployments of multi-vehicle commercial fleets.
HERE Routing creates optimized, safe and accurate navigation solutions customized to truck, light commercial vehicle and two-wheeler routing profiles.
HERE Geocoding and Search validates and enhances the accuracy of addresses and optimizes route planning through precise geocoordinates, ensuring fleet movements are based on the most accurate and current data available.
HERE Map Rendering offers up-to-date, detailed map data, in raster and vector formats, with rich attributes used specifically by commercial vehicles — including road restrictions, bridge heights, road topology and topography. This feature offers drivers visualization and cues for reliable commercial vehicle navigation.
A key benefit of the package is the incorporation of variables such as vehicle profiles, driver availability and delivery schedules, to provide instantly optimized tours and more precise estimated time of arrival (ETA).
The package is available for in-house software developers and integrated software vendors. The location-based APIs within the package are accessible directly in a user’s environment, with HERE offering the toolsets, workspaces and APIs for custom development.
The HERE Fleet Optimization package is built to run natively on Amazon Web Services (AWS), HERE Tour Planning and HERE Location Services, including Geocoding, Search, Maps, Navigation, Routing, Fleet Telematics and more.
The Global Earth Observation Decentralized Network (GEODNET) Foundation — the organization governing the blockchain-based global navigation network GEODNET — has entered new distribution and OEM agreements with AllyNav, Bad Elf, bynav, Sensori Robotics and Unmanned Life.
GEODNET’s blockchain-based global real time kinematics (RTK) and GNSS correction network consist of more than 7000 stations, which aim to provide a unique value proposition combining affordability, precision and reliability.
GEODNET will partner with AllyNav for precision farming; Bad Elf for surveying applications; bynav for automotive and internet of things (IoT) OEMs; Sensori Robotics for IoT robotic lawnmowers; and Unmanned Life for UAV orchestration.
The GEODNET ecosystem is undergoing continuous growth with an average of 100 to 200 GNSS reference stations added per week during the first half of 2024, the company says.
GEODNET is the world’s largest GNSS reference network for RTK-based positioning, according to the company. Standard GPS is usually off by two meters; however, devices connected to GEODNET’s global RTK network can achieve accuracy within 1-2 cm. Many IoT and autonomous applications, such as UAVs, smart mowers, and Advanced Driver Assistance Systems (ADAS), have shifted to RTK in place of standard GPS positioning.
GEODNET is a community-based Decentralized Physical Infrastructure Network (DePIN). Users can contribute to the network by installing and operating a reference station known as a satellite miner. Satellite miners deliver precise RTK correction data to devices equipped with GNSS receivers within a range of approximately 20-40 kms. GEODNET aims to provide the world’s most robust precision navigation system to a variety of industries, including self-driving cars, agriculture, consumer robots and more.
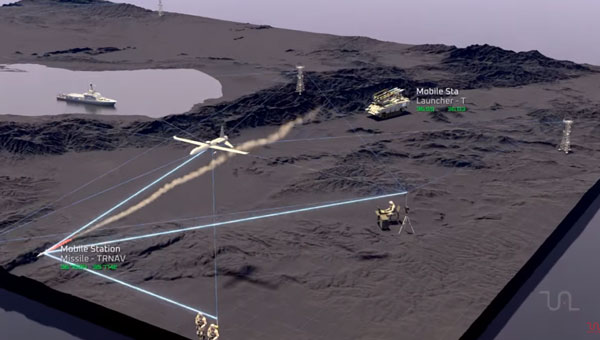
Tualcom has released TRNAV, a terrestrial navigation solution designed to operate with or without GNSS signals.
TRNAV establishes a mesh network of ground stations capable of operating independently from GNSS by using precise pre-established locations or connecting to GNSS when available. The system maintains location accuracy comparable to GNSS by connecting to at least three ground stations. Its highly synchronized timing system ensures a minimal drift of 10ns over a week without GNSS.
The system features a re-synchronization capability that allows the entire network to be updated instantly when just one station reconnects to a GNSS satellite, maintaining high precision across all platforms. Users can integrate mobile stations to enhance network flexibility and range, with the potential to cover distances up to 250km under ideal conditions.
TRNAV also offers a high-bandwidth communication channel for various data types, which offers extensive communication capabilities within the established network. The system employs AES-256 encryption and advanced waveform technologies, including DSSS/FHSS for robust and secure operations even in challenging environments.
As GNSS integrity and availability face increasing threats, TRNAV provides a reliable and resilient alternative for assured positioning, navigation and timing (PNT). Whether in defense, emergency response, or critical infrastructure, TRNAV’s adaptable architecture offers seamless and secure navigation and communication.
GNSS researchers presented hundreds of papers at the 2023 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 11-15, 2023, in Denver, Colorado, and virtually.
The following four papers focused on ways to combat GNSS jamming and spoofing. The papers are available at bit.ly/3UMAS13.
GPS World will be attending this year’s ION conference in Baltimore, Maryland on Sept. 16-20.
Photo: flashfilm / The Image Bank / Getty Images
Fault free integrity of urban driverless vehicles
For positioning in urban environments, systems can be integrated with an inertial navigation system (INS) to help provide continuous navigation through GNSS signal outages. Besides GNSS, another approach for positioning in urban environments is feature-matching. For example, light detection and ranging (lidar) can measure distances and angles for environmental features, such as local landmarks, which can then be associated with known feature locations stored in an onboard database.
This paper investigates how GNSS and INS, when augmented by lidar ranging from local landmarks, can offer safe navigation through a real-world urban environment under fault-free assumptions to achieve 100% availability of fault-free integrity, with requirements corresponding to maximum standard deviations between 0.05 m and
0.1 m in both lateral and longitudinal directions. The team determined which system elements and parameters are the most critical to urban navigation performance, including individual INS noise parameter specifications, average vehicle speed, kinematic constraints, landmark density, integrity requirements and the effects of velocity updates.
The team simulated GNSS availability along a 9 km urban transect in downtown Chicago. They considered multi-sensor integrated navigation architectures consisting of INS, ZUPT, GNSS, lidar, WSSs, and NHL and HL kinematic constraints to improve navigation availability. The simulation involved developed measurement models and a tightly coupled INS/multi-sensor integration scheme using an extended Kalman filter (EKF).
The results revealed that the accelerometer and gyroscope random walks contribute to the total position error considerably more than the accelerometer and gyroscope drift for the driverless vehicle application, especially when the vehicle is moving at low speeds. Intentional vehicle stops with ZUPT inputs mitigate the error propagation but increase drive time. Velocity updates from WSSs can partially calibrate along-track position errors but do not completely reset the INS drifting position errors. Position reference updates are required to handle the concentrated succession of GNSS-denied conditions in the Chicago transect.
Kana Nagai, Matthew Spenko, Ron Henderson and Boris Pervan;“Fault-free integrity of urban driverless vehicle navigation with multi-sensor integration: A case study in downtown Chicago.”
3D vision-aided GNSS
In this work, researchers aim to solve the major problem of GNSS/RTK positioning for autonomous systems through a deep exploration of the relationship between GNSS satellite measurements and visual landmarks in urban canyons. A 3D vision-aided method was proposed to improve GNSS real-time kinematic (RTK) positioning. The effectiveness was verified through several challenging data sets collected in urban canyons of Hong Kong using low-cost automobile-level GNSS receivers together with an automobile visual/inertial sensor suite.
To mitigate the impact of reflected non-line-of-sight (NLOS) reception, a sky-pointing camera with a deep neural network was employed to exclude these measurements. However, NLOS exclusion results in distorted satellite geometry. To fill this gap, complementarity between the low-lying visual landmarks and the high-elevation satellite measurements was explored to improve the geometric constraints. Specifically, inertial measurement units (IMUs), visual landmarks captured by a forward-looking camera, and healthy GNSS measurements were tightly integrated to estimate the GNSS-RTK float solution. The integer ambiguities and the fixed GNSS-RTK solution were then resolved. The effectiveness of the proposed method was verified using several data sets collected in urban canyons in Hong Kong.
The research indicated that GNSS-RTK promises potential solutions that may provide accurate, cost-effective, and drift-free positioning services for autonomous systems with specific navigation requirements. Unfortunately, the performance of the GNSS-RTK is significantly challenged in urban canyons due to the poor quality of GNSS measurements and satellite geometric distributions caused by signal blockage and reflections from surrounding buildings.
Weisong Wen, Xiwei Bai, and Li-Ta Hsu; “3D vision aided GNSS real-time kinematic positioning for autonomous systems in urban canyons.”
Low-cost inertial aids for GNSS
The rise of connected and automated vehicles has created a need for robust globally referenced positioning with increasing accuracy. Carrier-phase differential GNSS (CDGNSS) — a real-time variant for mobile platforms commonly known as real-time kinematic (RTK) GNSS — is a centimeter-accurate positioning technique that differences a receiver’s GNSS observables with those from a nearby fixed reference station to eliminate most sources of measurement error.
In this paper, researchers expand the navigation filter component of the CDGNSS system by tightly coupling with an inertial sensor and with vehicle dynamics constraints, and by incorporating measurements from multiple vehicle-mounted GNSS antennas. It also develops a novel robust estimation technique to mitigate the effects of multipath and allow for graceful recovery from incorrect integer fixes.
The estimator was evaluated using the publicly available TEX-CUP urban positioning data set, yielding a 96.6% and 97.5% integer fix availability, and a 12 cm and 10 cm overall (fix and float) 95th-percentile horizontal positioning error with a consumer-grade and industrial-grade inertial sensor, respectively, over more than two hours of driving in the urban core of Austin, Texas.
A performance sensitivity analysis showed that the false-fix detection and recovery scheme is key to achieving an acceptably low false integer fixing rate of 0.3% and 0.4%, respectively. Having a second vehicle-mounted GNSS antenna significantly increased integer-fix availability, decreased false-fix rate, and improved both root-mean-square and 95th-percentile positioning performance as compared to a single-baseline CDGNSS configuration.
James E. Yoder and Todd E. Humphreys; “Low-cost inertial aiding for deep-urban tightly coupled multi-antenna precise GNSS.”
Benchmarking urban navigation algorithms
In this work, to facilitate the research and development of reliable and precise positioning methods using multiple sensors in urban canyons, the research team built a multisensory dataset, UrbanNav, collected in diverse, challenging urban scenarios in Hong Kong. The dataset provided multi-sensor data, including data from multi-frequency GNSS receivers, an IMU, multiple light detection and ranging (lidar) units and cameras.
Meanwhile, the ground truth of the positioning — with centimeter-level accuracy — is postprocessed by commercial software from NovAtel using an integrated GNSS real-time kinematic and fiber optics gyroscope inertial system.
Detailed presentations are provided for sensor systems, spatial and temporal calibration, data formats, and scenario descriptions. Also, the benchmark performance of several existing positioning methods is included as a baseline.
Based on the evaluations, the team concluded that GNSS can provide satisfactory results in a middle-class urban canyon if an appropriate receiver and algorithms are applied. Both visual and lidar odometry are satisfactory in deep urban canyons, whereas tunnels are still a major challenge. Multisensory integration with the aid of an IMU is a promising solution for achieving seamless positioning in cities.
Li-Ta Hsu, Feng Huang, Hoi-Fung Ng, Guohao Zhang, Yihan Zhong, Xiwei Bai, and Weisong Wen; “Hong Kong UrbanNav: An open-source multisensory dataset for benchmarking urban navigation algorithms.”
Provectus HX2: Vehicle example for defense deployment testing of WaveSense.
GPR Ground Positioning Radar, a producer of ground-penetrating radar technology for autonomous vehicle localization, has entered a strategic collaboration with Rheinmetall Provectus, a provider of autonomous navigation solutions.
Under the collaboration, GPR will integrate its WaveSense localization system into Rheinmetall Provectus’ autonomous platforms, enhancing positioning and navigation capabilities in GNSS-denied environments. The integration seeks to enable new capabilities such as beyond line of sight (BLOS) and GNSS-denied leader-follower operations.
The partnership follows a successful proof of concept (PoC) conducted in rugged terrains in Ontario, Canada, during Q3 and Q4 of 2023. The PoC demonstrated WaveSense technology in GNSS-denied environments, showcasing its potential to improve autonomous navigation in challenging conditions. Both companies have invested significant resources to develop a robust integration of the WaveSense system, ensuring it is ready for deployment.