The National Space-Based Positioning, Navigation, and Timing Advisory Board continued its discussions on how best to protect, toughen and augment GPS at its 31st meeting, which took place Dec. 4-5 at the Sonesta Redondo Beach and Marina in Redondo Beach, California. The meeting was convened by James J. Miller, of NASA, who is the board’s executive director, and chaired by retired Adm. Thad Allen of the U.S. Coast Guard.
On the first day, after hearing reports from its six subcommittees, the board heard the following presentations:
Karen Van Dyke, director, PNT & spectrum management, Department of Transportation (DOT), on DOT’s IDM and complementary PNT work.
Maj. Christine Bonniksen, retired from the U.S. Air Force, deputy director for flight projects, NASA Langley Research Center, and Shachak Pe’eri, Ph.D., acting director, National Geodetic Survey, National Ocean Service, National Oceanic and Atmospheric Administration (NOAA), on NOAA’s implementation of a GDGPS-based GPS High Accuracy and Robustness Service.
Anh Nguyen, Ph.D., NASA flight opportunities program (Bryce Space and Technology, LLC) and Lisa Valencia, NASA Space Communications and Navigation Program (Overlook Systems Technologies, Inc.) on the SpaceLoft 15 multi-GNSS flight experiment (see the article on p. 16).
Allison Kealy, Ph.D., director of the Innovative Planet Research Institute, Swinburne University, Australia, on resilient PNT.
Brad Parkinson, Ph.D., the board’s first vice chair, on a comparison of GPS with the other GNSS.
Satoshi Kogure, senior chief officer of satellite navigation technology, Japan Aerospace Exploration Agency on Japan’s Quasi-Zenith Satellite System (QZSS).
Moon Beom Heo, Ph.D., executive director of KPS R&D Directorate, Korea Aerospace Research Institute on the Korean Positioning System (KPS).
Matt Higgins, international engagement subcommittee chair on Galileo.
Cordell DeLaPena, executive officer, MilComm & PNT, Space Systems Command, USSF on the status of the GPS program, including L5, OCX, civil signal monitoring, resilient-GPS and low-Earth orbit PNT.
On the second day, the board held a roundtable discussion, then heard updates from its international members and representatives. For video of the proceedings, go to youtube.com/@nationalpntboardmeetings822/streams.
To celebrate Allen’s long service as this board’s chair, NASA conferred a beautiful plaque to him, bearing the following text:
“PRESENTED TO Admiral Thad Allen
With our deepest gratitude, the NASA community and our many partners are very thankful for the friendship and dedicated leadership you have provided as the Chair of the National Space-Based Positioning, Navigation, and Timing Advisory Board. Your advocacy on behalf of GPS users worldwide will always be remembered and cherished. December 2024
Kevin Coggins
Deputy Associate Administrator, Space Communications and Navigation
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION”
The European Space Agency (ESA) will host the first FutureNAV Industry Day on Feb. 18, 2025 — at ESTEC, the Netherlands — to address the growing demand for advanced positioning, navigation and timing (PNT) technologies. This event aims to bring together European stakeholders in satellite navigation to discuss future developments and foster collaboration within PNT and GNSS sectors.
As the leading system developer and design authority for Galileo and EGNOS, ESA plays a crucial role in Europe’s satellite navigation landscape. The agency launched the FutureNAV program in 2022 to unify efforts in advancing navigation technologies. Two key missions under this initiative are low-Earth orbit (LEO) PNT, which will demonstrate the potential of navigation satellites in LEO and Genesis, which will combine four geodetic techniques in one satellite to improve Earth’s reference frame.
FutureNAV Industry Day seeks to provide attendees with insights into ESA navigation plans and potential opportunities for European industry. It will follow a Request for Information on LEO-PNT industrialization, gathering information on European production capabilities for payload building blocks and satellite platforms.
To complement these upstream initiatives, the Navigation Innovation and Support Programme (NAVISP) Industry Days will be held at the University of London on March 4-5, 2025, focusing on downstream applications and bringing together industry leaders and innovators.
Click here to register and learn more about the event.
Galileo is Europe’s civil global navigation satellite constellation and a major success of the European Union (EU). It provides the world’s most precise satellite navigation performance. Galileo services began in December 2016 and are currently supplied to more than 3 billion users. They offer several high-performance services worldwide, featuring various levels of accuracy, robustness, authentication and security.
Galileo is a key component of mass-market applications for such areas as transport, agriculture and timing but also for security-critical applications, such as health services, emergency and rescue services and law enforcement. Galileo services continue to expand with many new capabilities that are unique with respect to other GNSS.
The European Union Agency for the Space Programme (EUSPA) and the European Space Agency (ESA) continue to collaborate effectively on the many developments, deployments and evolution activities of the Galileo Programme, each according to their respective responsibilities for exploitation and system development, with the European Commission acting as the program manager.
Stable Service Performance
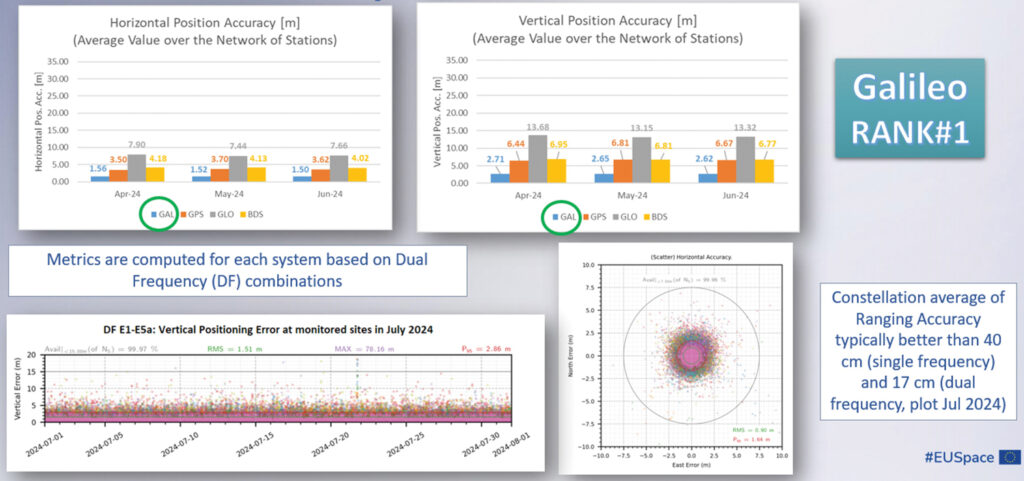
Galileo services continue to deliver excellent performance every month in a safe, secured and seamless manner, managed by EUSPA. The performance parameters of the Galileo services are independently monitored by the Galileo Reference Centre (GRC) and are regularly published on the web portal of the GNSS Service Centre (GSC): gsc-europa.eu.
The performance of the Open Service (OS) remains “Best in Class” among the GNSS providers. Timing users also continue to receive accurate (in the order of 5 ns) access to Galileo System Time, which they can trace to Universal Coordinated Time (UTC) through the corresponding offset parameters transmitted by the satellites.
The Search and Rescue (SAR) service was delivered well beyond the commitment to the users, for both forward and return link services, while the High Accuracy Service (HAS) and the Public Regulated Service (PRS) continue being provided as planned in the corresponding Service Definition Document (SDD).
The European Union Agency for the Space Programme (EUSPA) has awarded GMV a framework contract to deliver new Galileo functionalities under the EmeRgency Alerting System (ERAS). This four-year contract, valued at approximately $6 million, will enable significant advancements in Europe’s disaster response capabilities. The GMV-led consortium includes Ineco, ALTEN Spain and Kineton as subcontractors.
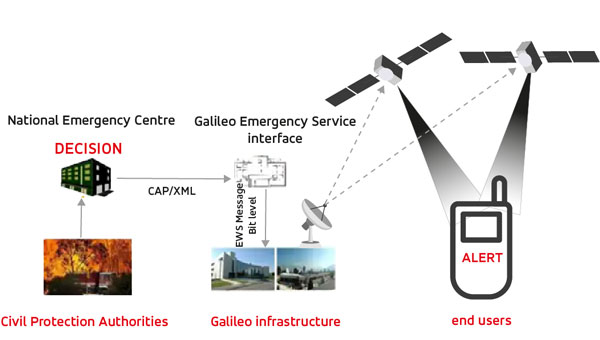
ERAS will primarily allow Member States’ National Civil Protection Authorities to broadcast emergency warning messages directly to populations in at-risk or affected areas. These alerts will be transmitted via Galileo satellites to smartphones and other Galileo-enabled devices. According to EUSPA, the messages will contain crucial information about the hazard, including its type, severity, affected area, expected onset and duration, as well as guidance for appropriate responses.
The Galileo Emergency Warning Satellite Service (EWSS) and ERAS seek to enhance Galileo by offering resilience and complementarity to existing public warning systems, independence from terrestrial and mobile networks, rapid communication with global reach and particular benefits for remote areas with limited mobile coverage.
The system is designed to provide a robust and versatile solution for emergency communications, ensuring that critical alerts reach populations even in challenging scenarios. ERAS is expected to be fully operational in the first half of 2026.
The implementation of ERAS comes at a critical time, as highlighted by the State of the Climate in Europe (ESOTC) report for 2024. Europe has experienced numerous extreme weather events in recent years, including heat waves, forest fires, floods and droughts. The continent is warming at approximately twice the global average rate, emphasizing the urgent need for effective warning systems and robust climate policies, GMV shared.
The joint use of Galileo ERAS and the Copernicus Emergency Management Service seeks to enhance the European Union’s and its Member States’ disaster management capabilities. This integration will provide a comprehensive approach to alerting populations about risks such as the recent disasters in Valencia, Spain and other parts of Europe.
The European Union Agency for the Space Programme (EUSPA) has awarded GMV a six-year framework contract to upgrade the European GNSS Service Centre (E-GSC) infrastructure. The contract is valued at €35 million ($39 million).
The E-GSC is critical to the European Union satellite navigation program’s infrastructure. Its primary mission is to provide a unified interface for users of the Galileo and EGNOS systems, offer supporting services, and contribute to delivering new Galileo services. The E-GSC’s various functions include distributing data from the European Union navigation satellite services to the user community and supporting the growth of the global Galileo applications market.
Originally designed to be part of the European GNSS infrastructure and to provide a unified interface between the Galileo system and its users, the E-GSC has expanded its role over the years to become a key component in delivering services enabled by the European Union Space Programme.
The new framework contract aims to advance the E-GSC’s capabilities, enabling it to take on increased responsibilities. This includes creating new services for users, enhancing their experience, integrating service delivery aspects of Galileo and EGNOS, and supporting the development of additional services.
GMV is leading a consortium that features Indra as the main industrial partner, along with prominent companies such as Spaceopal, ESSP, Alten, the Universitat Politècnica de Catalunya (UPC) and the Universidad Autónoma de Barcelona (UAB).
Under the supervision of EUSPA as Contracting Authority, GMV will oversee project management and IT infrastructure development through all stages, including definition, implementation, validation and integration into the Galileo ground segment. GMV will also develop the software components necessary for delivering new data and signal authentication services for Galileo satellites.
SpaceX has launched the latest pair of Galileo satellites from the Kennedy Space Center in Florida. The SpaceX Falcon 9 rocket carried satellites 31 and 32 (FM26 and FM32) to their designated orbits.
This launch, number 13 in the Galileo program, marks a crucial milestone in the constellation’s development. The addition of these satellites completes the designed constellation, with the required operational satellites plus one spare per orbital plane. The new pair will undergo testing at their final altitude of 23,222 km before becoming operational.
European Space Agency (ESA) Director of Navigation Javier Benedicto highlighted the importance of this launch, stating that the remaining six Galileo First Generation satellites are scheduled for deployment in 2025 and 2026.
These additional satellites are designed to enhance the system’s performance and reliability further, ensuring uninterrupted delivery of highly precise navigation services.
At ION GNSS+ 2024, Eric Châtre, head of EU GNSS exploitation and evolution at the European Commission, and Miguel Manteiga, Galileo project manager at ESA, participated in a panel titled “Status of GPS, Galileo, BDS, QZSS, KPS and NavIC.” They shared how 2024 has been a particularly eventful year for the Galileo program. In April, satellites 29 and 30 were launched and entered service in September. The new Public Regulated Service (PRS) signals began broadcasting, offering encrypted navigation for authorized governmental users. A significant upgrade of Galileo’s ground segment was completed without impacting users.
The Galileo system continues to evolve, with the development of Second Generation (G2) satellites underway. These satellites will feature fully digital navigation payloads, electric propulsion and inter-satellite link capacity.
Galileo satellites 29 and 30 have reached their target positions at an altitude of 23,222 km and are now fully operational three months after being launched from Cape Canaveral, Florida, by SpaceX. These new additions to the Galileo constellation are now active and provide navigation signals to users.
Both satellites have been positioned on the same orbital plane, one of three that comprise the Galileo constellation. With this latest addition, two of the three Galileo orbital planes are fully populated, bringing the constellation close to completion. The next Galileo launch is planned in the coming weeks from the Kennedy Space Center in Florida onboard a SpaceX Falcon 9.
The Galileo Service Operator, supported by a team of approximately 30 satellite experts from the European Space Agency (ESA) and satellite manufacturer OHB, conducted early operations at the Galileo Control Centre in Oberpfaffenhofen, Germany, under supervision from the European Union Agency for the Space Programme (EUSPA). Following the initial operations, the satellites entered a drift phase, during which ground teams guided them to their final positions, which was reached on June 24.
On August 21, 2024, ESA, OHB and payload manufacturer SSTL evaluated the in-orbit test results, confirming that the satellites had not experienced any degradation during launch. ESA, in collaboration with EUSPA, then validated the satellites’ performance at the system level.
On April 27, 2024 the SpaceX Falcon 9 medium-lift launch vehicle launched into orbit Galileo satellites GM25 and FM27 from Kennedy Space Center in Florida. This was Falcon 9’s 20th and final launch.
The EU Agency for the Space Programme (EUSPA) confirmed in a statement that it is now in the Launch and Early Orbit Phase (LEOP) stage of the two new L12 Galileo satellites. They will join the current Galileo operational fleet in the upcoming months. The latest batch of Galileo satellites are being operated by EUSPA and the Galileo Service Operator for the Early Orbit Phase (EOP).
The EUSPA operations team, through its Galileo Service Operations provider, took over the satellite operations as the satellites were separated from the launch vehicle and their automated initialization sequence started. Telemetry has been successfully acquired, their solar panels deployed and the batteries are charging, bringing the satellites to what is called the Holding Point, according to EUSPA.
The EOP is a vital step in a space mission, running through the gradual activation and testing of platform satellite components, once in orbit. From the Galileo Control Centre in Oberpfaffenhofen, Germany, the dedicated LEOP team will navigate the satellites to their designated orbit within the coming days. Following rigorous in-orbit testing and commissioning, the satellites will integrate into Galileo’s operational constellation at 23,220 km.
The mission is a collaboration between the European Commission, which lead the management of Galileo; EUSPA, which manages operations and services with the support of the Galileo service operator (SpaceOpal); and the European Space Agency (ESA), which serves as the design authority, responsible for development.
Current state of the art multi-frequency GNSS receivers operate by receiving L1 first and then L5. L5-first is a viable answer to the call for more resilience in GNSS as is being discussed in government and technical circles to protect vital national infrastructure. It is suggested as part of “Toughening Category 4: Signal Alternatives” to protect, toughen and augment (PTA) the current GNSS systems described by Brad Parkinson’s article in the March 2022 issue of GPS World.
Paul McBurney
The need arises from attacks directed by bad actors on a large scale, such as electronic warfare, and on a more humane scale, by bad actors such as self-jammers and spoofers. On top of that, normal interference can cause desensitization and denial of service on GNSS receivers from myriad terrestrial and satellite communications.
The PTA plan presents the Denial Radius Reduction Ratio (DRRR) figure of merit and shows that a J/S increase of 15 dB produces a DRRR of 0.18. Whereas a receiver without this additional 15 dB of J/S could be denied fixing out to 1 km from a given transmitter, a receiver with an additional 15 dB J/S would be denied out to only 180 m from the same transmitter.
The improvement in terms of area is proportional to radius squared. The article identifies that the J/S capability is different among GNSS signals and the best performance is obtained with L5, mainly because it has the highest chipping rate. L1C has a code length of 10,230 chips, the same as L5, but it is spread over 10 msec and has the same chipping rate as L1 C/A.
There are currently 72 L5 signals between GPS, Galileo, BeiDou and QZSS transmitting the same physical layer features of 10.23 MHz chipping rate, 1 kHz overlay codes and higher transmit power compared to nearly all L1 signals with a 1.023 MHz chipping rate and lower transmit power. The combination of these features at L5 is close to achieving this 15 dB performance level over L1.
Unlike current hybrid receivers, L5-first survives L1 jamming. (Photo: Carkhe / iStock / Getty Images Plus / Getty Images)
One might conclude that the current start of the art of a receiver with both frequencies (aka, a hybrid L1+L5) has this resilience. However, the market does not currently offer the ability to directly acquire L5 signals overall use cases of GNSS assistance without first acquiring signals at L1. This means they can only achieve this resilience when the interference is encountered after acquiring and fixing at L1. As soon as the L1 is lost and the position and time uncertainty grow beyond the receiver’s capacity to autonomously search for L5 signals, the receiver is denied service at the interference level tolerable at L1. If you cut the receiver into L1 and L5 pieces, only the L1 side is capable of fixing autonomously. As noted by Dennis Akos et al. (“Testing COTS GNSS Receivers Using Only a Subset of Supported Signals,” ION JNC 2023), “support for several signals/frequencies provides integrity and robustness.” Specifically, “under jamming scenarios, signal diversity can allow a receiver to still generate an accurate position solution.”
Current receivers are not able to acquire L5 for reasons related to history, cost and power consumption. Historically, the promise of L5 accuracy was so attractive that it was added to legacy chipsets based on L1 even when it was only partially deployed. It was impractical at that time to require L5 acquisition when there were fewer L5 satellites than at L1. Cost and power are related to the fact that L1 receivers’ acquisition methods are sized to acquire the L1, E1, B1 and G1 signals. Memory and compute capacities, including the digital clock speed, are sized for slower chipping rates and hence shorter code lengths. At this performance level, conventional time domain correlation is adequate. Some receivers deploy frequency domain methods at L1 and achieve a lower cost and power than time domain methods with similar capacity. However, the L5 acquisition complexity with time domain correlation is 100 times more than L1 as its complexity increases with N2, meaning the cost and power to acquire L5 is out of reach. While using a time domain acquisition engine to acquire L5 may be possible for strong signals when the code and frequency search space is constrained for those signals, directly acquiring L5 with conventional methods would have serious shortcomings in many use cases.
Interestingly, the signal designers across all GNSS systems have cleverly designed the L5 signals so they can be easily acquired after acquiring their counterparts on L1. The L5 primary and secondary code is predictable based on learning the L1 primary code and navigation data bit phase. E5a and B2a primary and secondary codes can be predicted by learning the well-designed E1/B1 primary and secondary code phases that have the same total period: the combination of the 4 msec code lengths synchronous with 25 bits of secondary code are in phase with the E5a 100 msec overlay code. After an L1 fix with fine time, L5 can similarly be directly acquired easily with limited searching.
The European Union Agency for the Space Program (EUSPA) has published a technical document detailing the main characteristics of the new Galileo Emergency Warning Satellite Service (EWSS).
According to the document, Galileo satellites will transmit emergency warning messages directly to Galileo-enabled smartphones and other navigation devices. The satellites will offer information related to the hazard, such as type, severity, expected onset and duration, as well as the location of the affected area and instructions to follow. The alert content will be generated by national authorities and transmitted to Galileo for broadcast.
“With this new document, some of our key stakeholders can already start to work with this new service,” said Fiametta Diani, head of market, downstream and innovation at EUSPA. “Civil protection authorities in the member states can start to prepare for how they will manage the alert messages they will send via Galileo. The same goes for the receiver and chipset communities, who will have to process this message.”
In 2023, EUSPA began testing the EWSS in different locations in Europe. “We have run trials in Toulouse and in Germany, specifically with a simulated explosion,” Diani said, “like what you might see with an industrial accident. We have also tested a tsunami alert in Cyprus.” The Union is developing the tsunami application together with Japanese partners. EUSPA has also finished flood testing in Belgium and Luxembourg.
EUSPA plans to launch the new EWSS in 2025, Diani said. “As for the receivers, we are working to get our chipset and receiver industry ready,” she said, adding that this process is also supported by the Fundamental Elements program.
Fundamental Elements is an EU funding mechanism that supports the research and development of European GNSS-enabled chipsets, receivers and antennas. The projects are part of the overall strategy for European GNSS market uptake, said EUSPA.
The member states and the correlating national civil protection authorities will initiate warnings, according to Ignacio Alcantarilla Medina of the European Commission.
“[Authorities] will send a message to the Galileo system, and then Galileo will transmit that message through its satellite signals to the users,” he said.
According to EUSPA, the service is designed to be used worldwide to serve as a backup to the already existing mobile network warning systems.
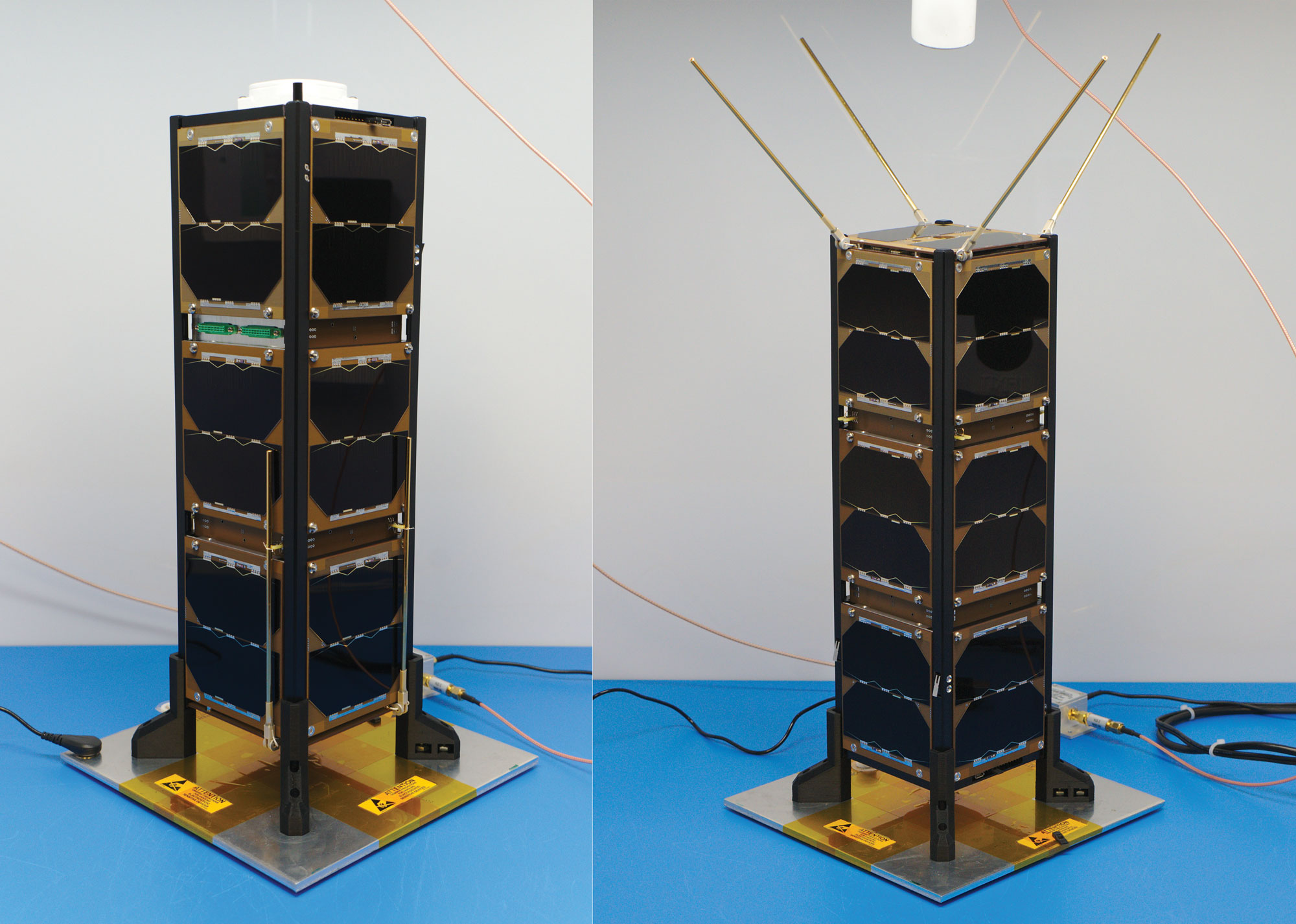
Figure 1: Bobcat-1, with communications antenna stowed (left) and deployed (right). Bobcat-1 measures approximately 10 x 10 x 30 centimeters. (All figures except FIGURE 3 provided by the authors)
Bobcat-1 was a three-unit CubeSat developed and built at Ohio University’s Avionics Engineering Center in Athens, Ohio, and was named after the university’s mascot. FIGURE 1 shows Bobcat-1 with and without its antenna deployed. The satellite was launched to the International Space Station in October 2020 (see FIGURE 2) and deployed into low-Earth orbit (LEO) the following month (see FIGURE 3). In April 2022, it deorbited and burned up in Earth’s atmosphere as planned, after a successful 17-month mission, lasting eight months longer than anticipated. The last signal decoded from Bobcat-1 was received only about 10 minutes before the satellite’s demise, from an altitude of about 109 kilometers, by an amateur radio operator (ZR6AIC) near Johannesburg, South Africa, associated with SatNOGS, a global network of amateur satellite-networked open ground stations.
The main mission of the Bobcat-1 CubeSat was to evaluate the feasibility of GNSS-to-GNSS time offset monitoring from LEO. One of the secondary mission objectives was GNSS spectrum monitoring.
In addition, Bobcat-1 also included a side-mission, hosting a software-defined GPS/Galileo receiver developed by the University of Padova and Qascom — an Italian engineering company providing security solutions in satellite navigation and space cybersecurity — to perform its in-space demonstration and testing. This receiver served as a prototype for the receiver soon to be launched on NASA’s Lunar GNSS Receiver Experiment (LuGRE) mission.
Communications and control of the satellite utilized the 70-centimeter amateur radio satellite band (435-438 MHz) at a typical data rate of 60 kilobits per second and were primarily conducted using a dedicated ground station on the roof of the engineering building at Ohio University (see FIGURE 4). In total, Bobcat-1 collected and downlinked more than 656 megabytes of data during its lifetime. Over the course of the mission, Bobcat-1’s firmware was updated in-orbit on six occasions, allowing for minor enhancements to the data collection system.
Figure 2: Bobcat-1 launches aboard the Cygnus NG-14 resupply mission to the International Space Station. (All figures except FIGURE 3 provided by the authors.)
BACKGROUNDS: GNSS-TO-GNSS TIME OFFSET
GNSS-to-GNSS time offsets — also referred to as GNSS inter-constellation time offsets, inter-system biases or XYTOs — are among the critical parameters for full GNSS interoperability. Users with poor GNSS visibility, such as high-altitude spacecraft, which operate above the GNSS constellations, often do not have enough satellites in view to enable an accurate solution and can experience high dilution of precision. These users could benefit from XYTO estimates provided externally, assuming their receiver-characteristic inter-system biases (ISBs) are calibrated.
To determine a user solution using measurements from a single GNSS constellation, one must solve for four unknown parameters: the user’s spatial coordinates and the receiver-to-system time offset. This means that a minimum of four satellites must be visible to solve for a user solution. If a user has sufficient visibility of satellites from different constellations, a multi-GNSS solution can be determined. However, when applying measurements from multiple constellations, an additional unknown is added for each constellation used. For example, for a user solution incorporating measurements from both GPS and Galileo, one needs to solve for five unknowns: the user’s spatial coordinates, the receiver-to-GPS time offset, and the receiver-to-Galileo time offset. Since each constellation’s time scale is independent of the others, the inter-system time offset between the time scales leads to a prominent bias in a multi-constellation solution. Inter-system time offsets between GPS, Galileo, GLONASS, and BeiDou are generally expected to range from 10 to 100 nanoseconds, resulting in 3 to 30 meters of possible positioning error.
System-to-system time offsets are currently estimated by extensive networks of ground stations, such as those used by the International GNSS Service Multi-GNSS Experiment (MGEX). In addition, GNSS service providers often broadcast XYTO estimates in their navigation messages.
Figure 3: Bobcat-1 is deployed into low-Earth orbit by the Nanoracks CubeSat Deployer alongside SPOC, a CubeSat developed by the University of Georgia. (Photo: NASA)
So, why would estimating XYTOs from LEO be of interest?
Low-Earth orbit enables high GNSS visibility. The approximately 90-minute orbital period allows for observations from nearly all GNSS satellites multiple times per day. This enables high visibility of multiple satellites from each constellation, in turn enabling high observability of constellation parameters such as XYTOs, leveraging satellite-characteristics errors. In addition, tropospheric errors are absent and multipath is limited and can be bounded based on the CubeSat’s dimensions and geometry. Exploiting measurements from LEO could provide additional measurements and independent monitoring of the XYTO estimates provided by ground networks.
However, to estimate system-characteristic XYTOs, the receiver-characteristic biases need to be calibrated. The target is to reach accuracy of approximately 1 nanosecond or possibly lower. Therefore, the error sources need to be evaluated, mitigated, or bounded.
Figure 4: Bobcat-1’s dedicated ground station on the roof of Stocker Center in Athens, Ohio. (All figures except FIGURE 3 provided by the authors.)
Although the ionospheric effects are lower in LEO than on Earth, they cannot be neglected. Therefore, dual-frequency ionospheric delay estimates must be applied. To do so, the receiver’s inter-frequency biases (IFBs), which can introduce errors on the order of nanoseconds, need to be calibrated, as well as the satellite differential code biases (DCBs), orbit and clock errors and receiver antenna group delay. An additional challenge introduced by the LEO environment is the wide range of temperatures to which the receiver is subjected. Over a single orbit, the receiver’s temperature can vary from approximately 0 to 50 degrees Celsius. The effects of these temperature variations cause fluctuations in the receiver’s IFBs, which need to be evaluated and calibrated. Pre-launch measurements in a controlled environment using a climate chamber and two receivers of the same make and model were used for calibration. We have detailed those measurements elsewhere.
The multipath error can be bounded, as a first approximation, to 10 centimeters (or about 0.3 nanoseconds in equivalent signal delay) due to the dimensions of the CubeSat. However, given the mount of the antenna is on one of the CubeSat’s two 10 × 10 centimeter faces, that upper bound is in practice much smaller and the multipath error is mostly negligible.
Finally, the last remaining major error sources to be calibrated are the receiver ISBs. The main goal, to demonstrate the feasibility of LEO-CubeSat-based monitoring of GNSS XYTOs, requires showing the stability (or the repeatability) of the receiver biases in orbit.
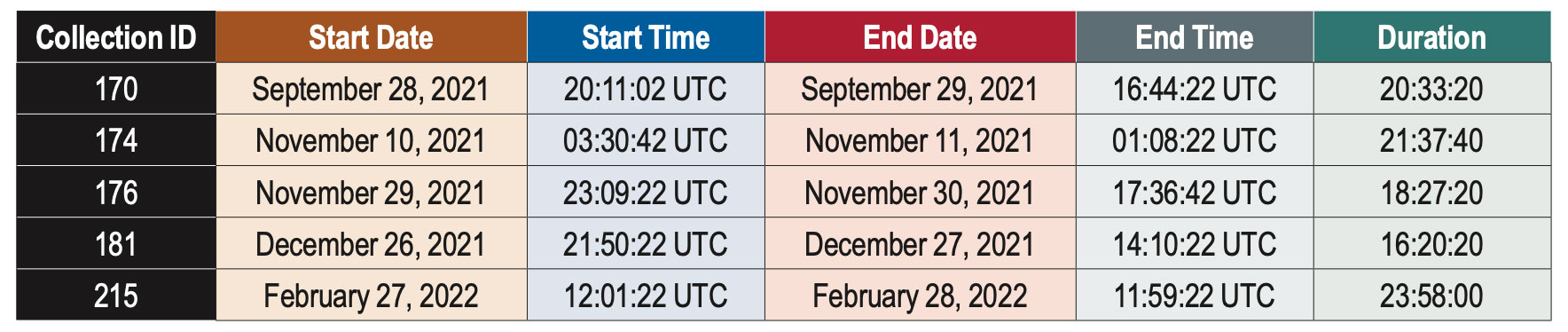
Table 1: Summary of data collections discussed in this article.
DATA COLLECTION
Bobcat-1’s primary payload was a NovAtel OEM719, a triple-frequency multi-GNSS receiver, enabling measurements on all frequencies from GPS, GLONASS, Galileo and BeiDou, as well as the regional navigation satellite systems (RNSSs) QZSS and NavIC. The measurements were collected and downloaded, for post-processing purposes.
Pseudorange and carrier-phase measurements, as well as carrier-to-noise-density ratio estimates, were collected, together with the receiver’s position and velocity estimates, and other parameters such as the temperature measured by the two sensors embedded in the receiver. In limited instances, power spectral density measurements and in-phase and quadrature (I/Q) component samples were collected to support the secondary mission, GNSS spectrum monitoring. The limited downlink capacity of the satellite constrained these measurements to short time intervals.
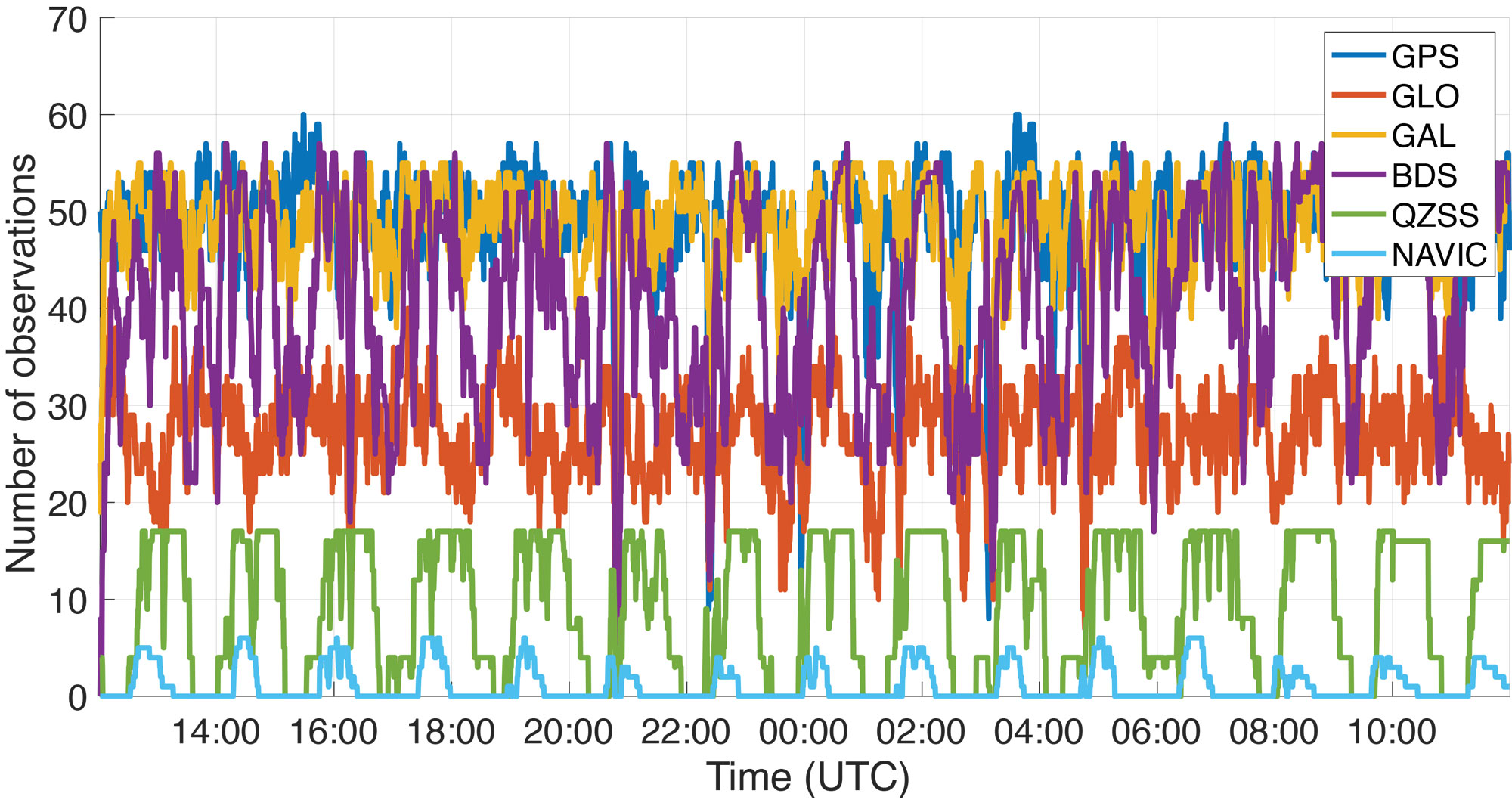
Figure 5: Number of observations recorded by Bobcat-1 from each GNSS constellation during a data collection started on February 27, 2022.
The goal of the mission is to estimate the XYTOs for all the GNSS constellations. However, in this article only the Galileo-to-GPS time offset (GGTO) is considered. The Galileo Performance Reports published by the European Union Agency for the Space Programme (EUSPA) provide information on the accuracy of the GGTO broadcast parameters, which are typically within approximately 3 nanoseconds of the true GGTO. Therefore, the broadcast GGTO provides a point of comparison and reference for Bobcat-1’s estimates.
A summary of the data collections considered in this work is provided in TABLE 1. These data collections are among the longest recorded by Bobcat-1. As an example, FIGURE 5 shows Bobcat-1’s data collection for February 27, 2022. It should be noticed that data collections were initiated from the control station at Ohio University when the CubeSat was in view, and each data collection would start only when the satellite’s battery voltage was above a defined threshold. The collection would stop safely if a minimum voltage threshold was reached. The data sets collected during the first months of the mission had durations limited to one to four hours, since the minimum battery voltage threshold was set conservatively. However, as the mission continued, data collections recorded in the last several months before deorbiting were configured with lower thresholds, enabling continuous data collections with durations of up to 24 hours. During the longer data collections, the sampling period was set to 20 seconds to reduce the total quantity of data stored and downlinked. The work described here focuses on a select few data collections that span a period of five months between September 28, 2021, and February 27, 2022.
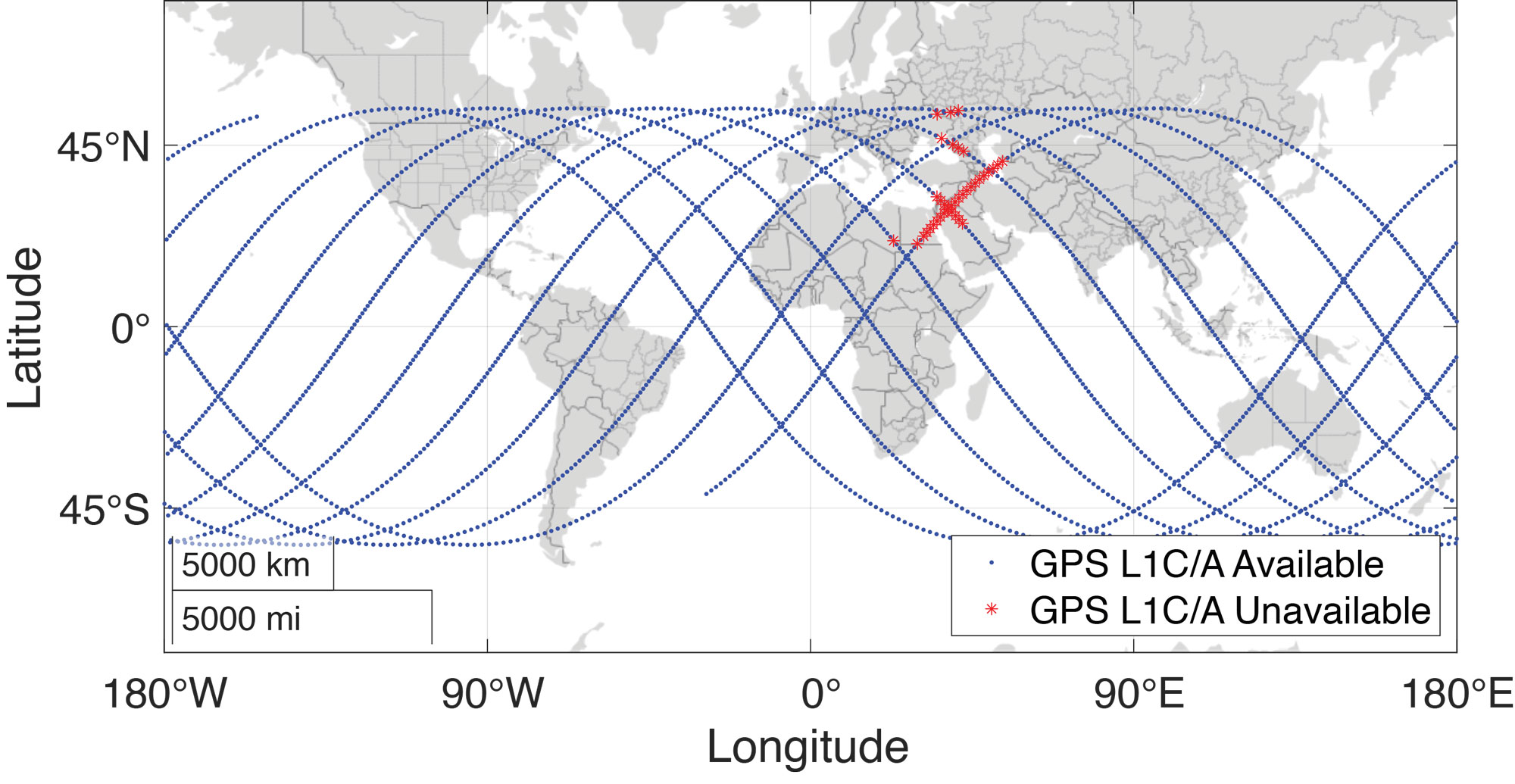
Figure 6: Bobcat-1’s ground track during a data collection for XYTOs estimation held in February 2022, approximately 24-hours long. Note that the blue dots correspond to the positions (latitude and longitude) of Bobcat-1. The red stars indicate that even if the position was calculated thanks to a multi-frequency and multi-GNSS solution, GPS L1 C/A measurements were not available. Analysis of the carrier-to-noise-density ratio measurements and comparison with the available spectrum measurements showed that in correspondence to those positions interference was present.
The data contain multi-frequency measurements from all systems, with an average of 180 observations made per sample. The maximum number of observations at once was 217. While multi-frequency measurements were collected from all constellations, this analysis only uses single-frequency measurements from two constellations: GPS L1 C/A and Galileo E1C.
RESULTS
There are two simple approaches to calculating inter-constellation time offsets: one involves computing multiple single-constellation user solutions, and the other involves a single multi-constellation user solution. Each approach has slightly different effects in terms of error propagation. In the first approach, the XYTOs can be calculated by taking the difference of the independently calculated receiver-to-system time offsets. This method requires at least four satellites from each constellation to be visible. In the second approach, all the receiver-to-system time offsets for all constellations involved in the solution are solved simultaneously. This reduces the number of measurements required per-constellation, with the minimum number of measurements needed being equal to the number of unknown state variables.
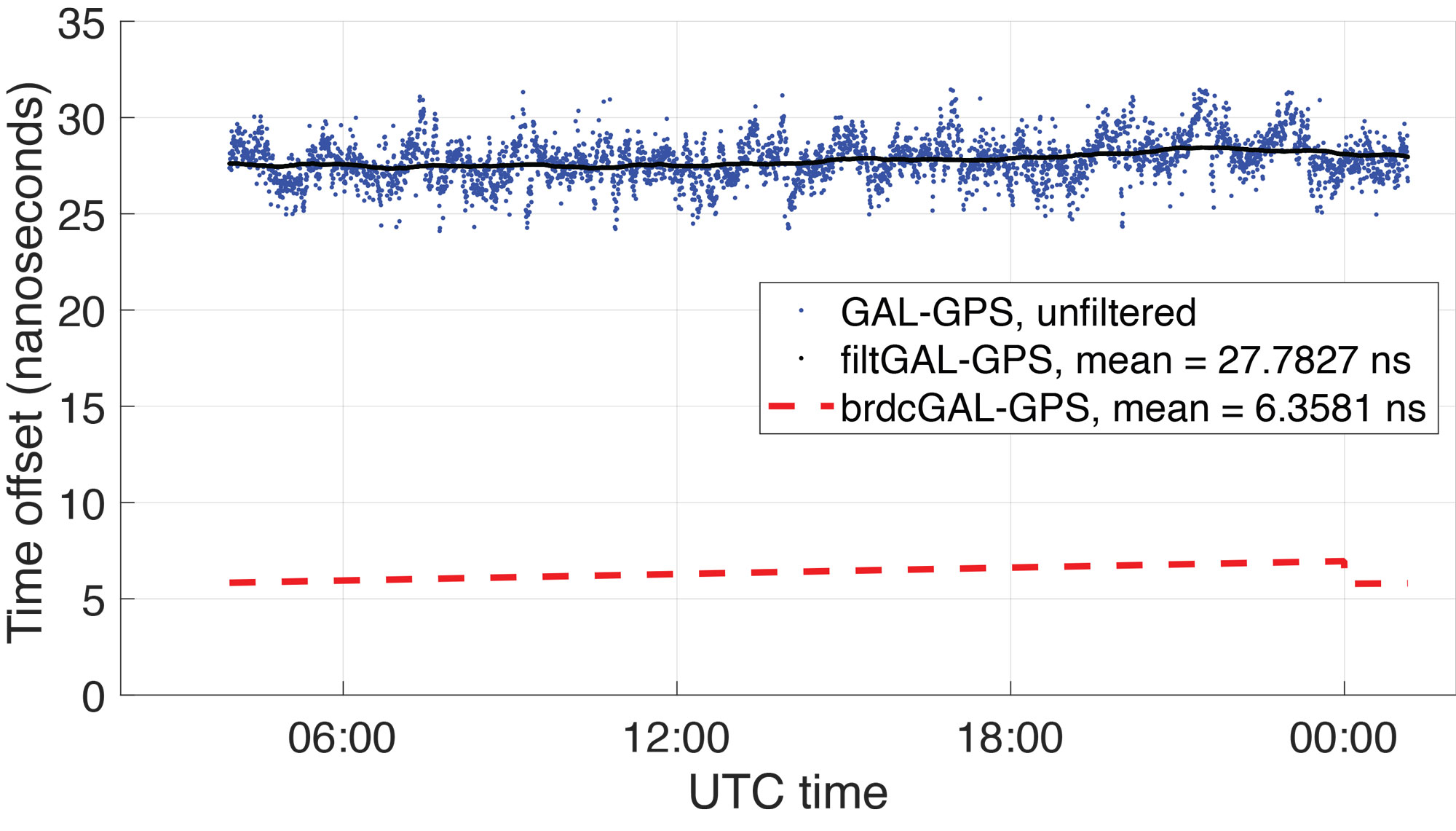
Figure 7: Broadcast GGTO (red) compared to Bobcat-1 Galileo-GPS time offset estimate, before calibration (blue) and filtered estimate (black). The results are related to data collection 181, started on December 27, 2021, which lasted about 16 hours (more than 10 orbits). The estimates’ variations, on the order of ±5 nanoseconds, are mainly due to temperature effects during the orbit and here are simply represented with a moving average.
In general, the latter method improves the XYTOs’ solution availability since the receiver-to-system time offsets for each system can be calculated with even fewer than four measurements from each system. For each sample point, the user solution was determined using this method, and the GGTO estimate was calculated by taking the difference of the receiver-to-GPS time offset and the receiver-to-Galileo time offset. This method allows the XYTO to be estimated by the receiver even when visibility is degraded. For example, as shown in FIGURE 6, Bobcat-1’s data collections are affected by interference, mostly on GPS L1, in some regions. Points where interference was believed to be present are marked by red stars on Bobcat-1’s ground track shown in the figure, specifically denoting points where the number of tracked GPS L1 C/A signals drops below four. For each sample point, the user solution was determined using the method discussed above, and the GGTO estimate was calculated by taking the difference of the receiver-to-GPS time offset and the receiver-to-Galileo time offset.
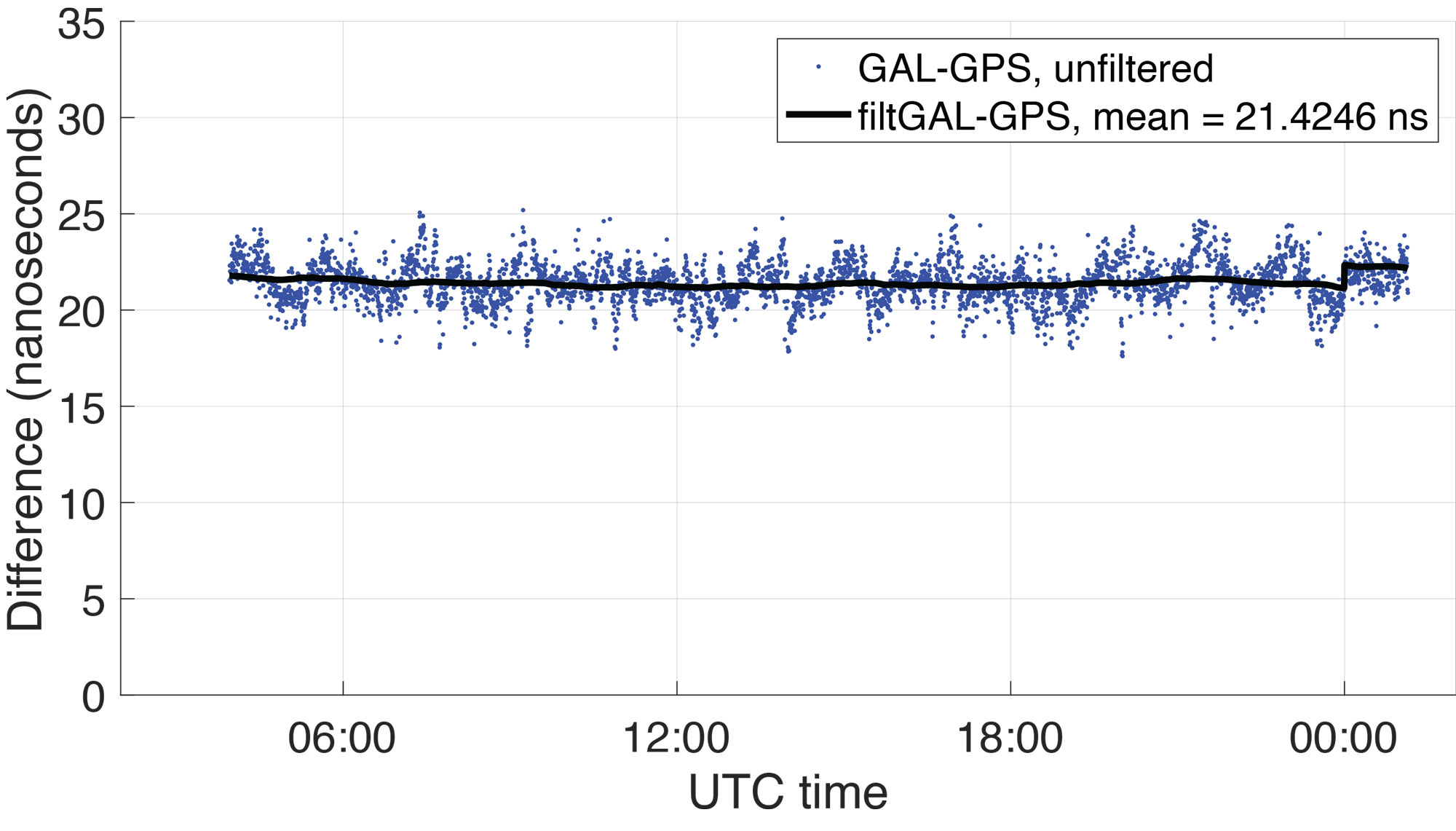
Figure 8: Difference between Bobcat-1 estimate and GGTO. The residual is mainly an estimate of the receiver inter-system bias that even pre-calibration shows to be stable in orbit as shown in Table 2.
FIGURE 7 shows (in blue) the GGTO estimate using Bobcat-1 measurements (data collection 181, started on December 27, 2021, and lasted about 10 orbits). The plotted values are the estimate of the system-to-system bias (GGTO) from which the receiver-specific ISB (Galileo-to-GPS) has not yet been removed. The oscillations visible in the unfiltered GGTO estimates are the result of temperature effects on the receiver. They can be mitigated by applying the calibrations made during pre-launch climate chamber testing, though for this analysis the estimates are simply filtered using a moving average (shown in black in the figure). Note that the abrupt change in the broadcast GGTO about 21 hours after the collection start corresponds to the start of a new day in UTC time, when a new estimate of the broadcast GGTO parameters was provided.
In FIGURE 8, the difference between the Bobcat-1 estimate of the GGTO and the broadcast GGTO is plotted (raw, in blue, and filtered with a moving average, in black). This is an estimate of the Bobcat-1 receiver’s Galileo-to-GPS ISB, which needs to be stable and repeatable in orbit, to enable accurate estimates of the true GGTO. As Figure 8 indicates, the receiver ISB shows stability even before calibration, showing periodical variations mainly due to temperature changes over the orbit.
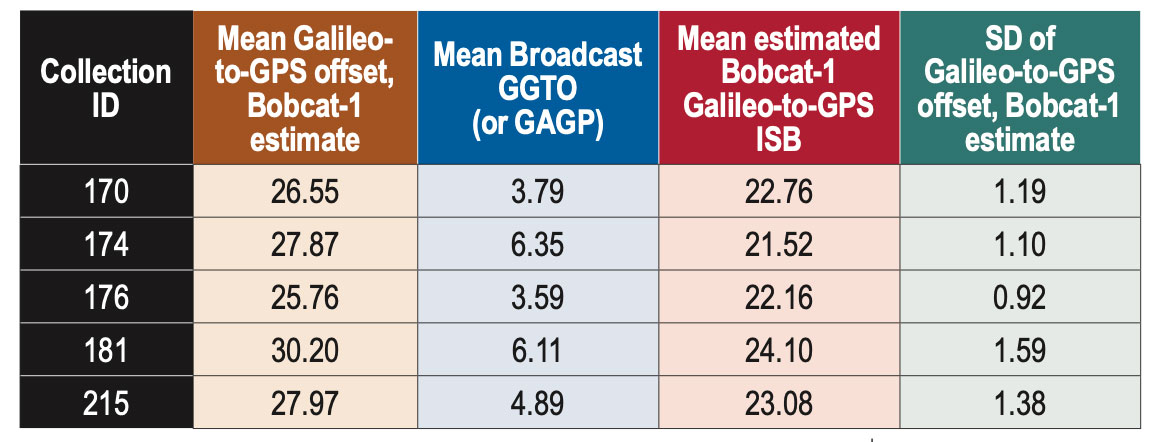
TABLE 2 summarizes some results over a five-month period. Only the longest data collections were considered, but the shorter ones are also under analysis to provide a longer and denser observation window. From the data in Table 2, the Bobcat-1 receiver’s mean Galileo-to-GPS ISB, estimated by comparison with the broadcast GGTO, shows a standard deviation, pre-calibration, of less than 1.5 nanoseconds over five months. Considering that the accuracy on the broadcast GGTO is expected to be ≤ 3 nanoseconds, this estimate of the receiver ISB shows that its stability over time may enable accurate XYTO monitoring from LEO.
Table 2: Bobcat-1 Galileo-to-GPS time offset vs broadcast GGTO, for different data collections over about five months. All figures in columns two through five are in nanoseconds.
The implementation of the receiver bias calibration, including the temperature effects, will refine this result. The final test will include assessing the performance of the calculated system XYTO, utilizing it in the solution of another receiver previously calibrated and at a known location.
CONCLUSIONS
Results of five 15+ hour data collections spanning a period of five months are compared. The difference between the broadcast GGTO and the GGTO estimate calculated using data from Bobcat-1 appears to be stable within 1.5 nanoseconds. Observing the in-orbit data and comparing it with the data collected previously in a controlled environment in the laboratory, a high correlation is observed between the bias change over time and the measured receiver temperature. The mitigation of this effect will enable stability of our receiver characteristic GGTO estimate to within 1 nanosecond. These experimental results suggest that a few multi-GNSS receivers in LEO could provide a method to monitor XYTOs in near real time, providing redundancy and diversity to the ground-network-based estimation system.
ACKNOWLEDGMENTS
The authors would like to acknowledge NASA’s Satellite Communication and Navigation Office (SCaN), NASA’s Glenn Research Center, NASA’s CubeSat Launch Initiative (CSLI), and Ohio University for funding the Bobcat-1 CubeSat mission. Additionally, we thank Kevin Croissant and Gregory Dahart, previous student members of the Bobcat-1 team, and Dr. Frank van Graas, Ohio University Professor Emeritus and former faculty member of the Bobcat-1 team.
This article is based on the paper “Receiver-specific GNSS Inter-system Bias in Low-Earth Orbit” presented at ION ITM 2023, the 2023 International Technical Meeting of the Institute of Navigation, Long Beach, California, January 23-26, 2023.
Qualinx, a company specializing in ultra-low power wireless tracking and connectivity semiconductors, has announced a partnership with the European Union Agency for the Space Programme (EUSPA). This collaboration, under the Fundamental Elements EU R&D funding mechanism, aims to develop a consumer-grade, low-power GNSS receiver for EUSPA’s GNSS authentication service.
The project focuses on the Galileo Open Service Navigation Message Authentication (OSNMA) service, which is designed to verify that users are receiving data from Galileo satellites. This service was introduced in response to an increasing number of spoofing incidents. Qualinx was selected for this project following a six-month selection process conducted by EUSPA.
Qualinx’s technology, known as digital radio frequency (DRF), transforms most analog functions of a wireless chip into digital circuits, which can be customized for each application through software. This technology is designed to reduce power consumption compared to traditional GNSS receivers. The company aims to provide smaller, more cost-effective solutions while extending the operating life of battery-powered navigation devices.