The new ASPRS accuracy standards fill a critical need for map users and map makers alike. For centuries, map scale and contour interval have been used as an indication of map accuracy. Users want to know how accurately they can measure different things on a map, and map makers want to know how accurate maps need to be in order to satisfy user requirements. Those contracting for new maps depend on some form of map accuracy standard to evaluate the tradeoff between the accuracy required vs. how much time and expense are justified in achieving it, and then to describe the accuracy of the result in a uniform way that is reliable, defensible, and repeatable, ASPRS explains in a statement.
The new ASPRS standards address recent innovations in digital imaging and non-imaging sensors, airborne GPS, inertial measurement units (IMU) and aerial triangulation (AT) technologies. Unlike prior standards, the new standards are independent of scale and contour interval, they address higher levels of accuracies achievable by the latest technologies (such as unmanned aerial systems and LiDAR mobile mapping systems), and they provide enough flexibility to be applicable to future technologies as they are developed. Finally, the new standards provide cross references to older standards, as well as detailed guidance for a wide range of potential applications.
No prior U.S. accuracy standard comprehensively addresses the current state of mapping technology, which is why the new ASPRS standards were developed. The National Map Accuracy Standards (NMAS), developed in 1947, are still used because they are simple, but there is no scientific correlation between those standards and current mapping methodologies.
The ASPRS 1990 Standards were an improvement over NMAS; however, they did not do well in representing the capabilities of LiDAR, orthoimagery, digital mapping cameras or other current technologies in wide-spread use today.
The National Standard for Spatial Data Accuracy (NSSDA) is a reporting standard that references the old ASPRS 1990 standards and is cross-referenced in the new ASPRS standards. NSSDA provides no accuracy thresholds and does not by itself provide any new or updated guidance on how to select or specify an appropriate accuracy for intended applications.
The new ASPRS standards were developed by the ASPRS Map Accuracy Standards Working Group, a joint committee under the Photogrammetric Applications Division, Primary Data Acquisition Division and LiDAR Division, which was formed for the purpose of reviewing and updating ASPRS map accuracy standards to reflect current technologies. A subcommittee of this group, consisting of Qassim Abdullah, David Maune, Doug Smith, and Hans Karl Heidemann, was responsible for drafting the document.
Draft versions of the standard underwent extensive review, both within ASPRS as well as through public review by other key geospatial mapping organizations, prior to final approval by the ASPRS Board of Directors on November 17, 2014.
The Indian Space Research Organization (ISRO) is expected to launch IRNSS-1D on March 9, reports The Times of India. IRNSS-1D is the fourth navigation satellite in the Indian Regional Navigational Satellite System, and will make the constellation operable.
The launch is tentatively planned for March 9 around 6:35 p.m. However, final go for the launch will be given by the ISRO’s Launch Authorization Board, which will meet March 6.
IRNSS-1D will be flown into space in the Indian Polar Satellite Launch Vehicle-XL.
The space segment of the IRNSS consists of seven satellites: three in geostationary orbit and four in inclined geosynchronous orbit. The ground segment consists of infrastructure for controlling, tracking and other facilities. The entire IRNSS constellation of seven satellites is planned to be completed by 2015.
Both IRNSS-1A and 1B are functioning satisfactorily from their designated geosynchronous orbital positions. The first three satellites in the IRNSS series were launched from Sriharikota on July 1, 2013, April 4, 2014, and October 16, 2014. IRNSS-1E and IRNSS-1F satellites are expected to be launched before year end.
IRNSS is an independent regional navigation satellite system designed to provide position information in the Indian region and 1,500 kilometers around the Indian mainland. IRNSS will provide two types of service: Standard Positioning Services (SPS) — provided to all users — and Restricted Services (RS), provided to authorized users.
The United States Civil GPS Service Interface Committee (CGSIC) has issued a notice about a problem some receivers are having implementing the correct time. The U.S. Coast Guard Navigation Center has received reports of synchronization issues since the implementation of a leap second on Jan. 21. Users experiencing this problem should contact the receiver manufacturer for a firmware or software update. Here is the text of the CGSIC notice:
All CGSIC: 2015 GPS Future Leap Second Implementation
The GPS 50 bit-per-second navigation message transmitted by each GPS satellite (specifically Page 18, subframe 4) includes the parameters needed to relate GPS time to UTC (Coordinated Universal Time).That relationship is maintained through leap second implementation transitions by IS-GPS-200 compliant user equipment.For leap second transition, user equipment must utilize the notice regarding a scheduled future delta time due to leap seconds (ÄtLSF), together with the week number (WNLSF) and the day number (DN), at the end of which the leap second becomes effective.
On or about Jan. 21, 2015, those GPS navigation messages began to include futurevleap second data which indicates an increase in the leap second to become effective at the end of June 2015.IS-GPS-200 revision H, dated 24 Sep 2013 paragraph 20.3.3.5.2.4 Coordinated Universal Time (UTC), documents the appropriate algorithm details to ensure correct utilization of the parameters above (including all potential truncated week number transitions and variations in time of processing relative to satellite upload timing near the future leap second effectivity).
The data upload for the June 30 leap second, initiated with SVN48/PRN07 at 18:33:56z on Jan. 21, was correctly executed. However, there are several receivers brands/models that seem to be mishandling this information and applying the leap second now. This is creating a negative one-second offset in faulty receivers. The U.S. Coast Guard Navigation Center has reports of these receivers causing synchronization issues with radios, computer systems, and data logging equipment.
Users experiencing issues with GPS receivers that began on Jan. 21 should contact the receiver manufacturer to determine if the latest firmware or software patch can correct the issue.
The third and fourth Galileo Full Operational Capability (FOC) satellites are a confirmed “fit” for their Arianespace Soyuz launch March 27, having made initial contact with the mission’s dual-payload dispenser in French Guiana, according to Arianespace.
The fit check was completed over a two-day period inside the Spaceport’s S1A payload preparation building. The two satellites were installed separately, with the Flight Model #3 (FM3) spacecraft integrated on — and subsequently removed from — the dispenser on Feb. 9. Flight Model #4 (FM4) underwent the same process the following day.
The payload dispenser for Galileo was developed by RUAG Space Sweden for Arianespace, and carries one satellite on each side. It will deploy the spacecraft during the Soyuz launch by firing a pyrotechnic separation system to release them in opposite directions at the orbital insertion point.
Final integration on the dispenser will be performed during upcoming processing at the spaceport, and will be followed by the completed unit’s installation on Soyuz.
The March 27 mission — designated Flight VS11 in Arianespace’s numbering system — will be the company’s fourth launch carrying spacecraft for the Galileo constellation.
Air Force Orders Two More GPS III Satellites
The United States Air Force plans to order two more GPS III satellites from contractor Lockheed Martin. Lockheed Martin is under contract to build eight GPS III satellites, with the first planned to be launched in 2016. The contract includes options for up to four more satellites.
However, the Air Force plans to open up construction of subsequent GPS satellites for competitive bidding with GPS III space vehicle 11. The satellites are part of the Air Force’s $167.3 billion budget request for fiscal 2016, up from $152.8 billion provided by Congress for fiscal 2015.
The Air Force also intends to buy only one GPS satellite — from Lockheed Martin or a different contractor — in 2017 rather than the three included in the current budget blueprint.
The Lockheed Martin GPS III Non-Flight Satellite Testbed (GNST).
A Lockheed Martin vice president has stated that the first GPS III satellite will likely launch in 2017, not 2016 as had been projected in the most recent update.
The company is readying the first satellite for launch availability by the end of 2015, for launch as early as the end of this year, but Space News reports that Mark Valerio, vice president and general manager of Lockheed Martin’s military space business, stated in a Feb. 18 news briefing that he expects the Air Force will schedule its launch for early 2017.
The GPS III generation of modernized satellites — with new signals, added signal strength, and resistance to interference and jamming — was originally projected to begin orbiting in 2014. Technical difficulties have delayed the program. The principal issues, those with the payload, have now been resolved, according to Valerio.
Valerio expects a firmer GPS III launch announcement for 2017 in March. He expected the final launch date “will depend on the health of the existing constellation, the availability of launch slots and synchronization with the ground system.” Ultimately, the Air Force always makes the final decision on the launch date.
Lockheed Martin is contracted to build eight GPS III satellites.
Late last year, a spokesman for the Space and Missile Systems Center said that “The first GPS III launch is tentatively considered for the first half of FY17, based on booster availability and Air Force launch priorities.”
The Air Force has put out feelers for other contractors to finish out the full generation of GPS III satellites. Lockheed Martin is building eight, with an option for four more, totalling 12; a complete constellation of III-generation satellites would require 24. Boeing Space and Intelligence Systems and Northrop Grumman Aerospace are reportedly interested.
“The best thing I can do is keep marching along the plan we have,” Valerio said. “We’re certainly not afraid of the competition.” Lockheed Martin has submitted cost-cutting proposals for the current GPS III satellite design, he added.
Ground Control
The corresponding new ground system for GPS III, the Operational Control Segment (OCX), has also fallen behind schedule. Just this month, the Air Force announced that Lockheed Martin may develop an interim control capability, a set of changes implemented upon the current control segment, the Architecture Evolution Plan (AEP), as a backup.
Michael Gilmore, the Defense Department’s director of operational test and evaluation, recently stated that OCX delays have pushed back GPS III operational testing “until after at least six, and as many as eight,” satellites have been launched into orbit. “This introduces significant risk that effectiveness and suitability deficiencies in GPS III satellites will not be discovered until it is too late to prevent their introduction to the operational constellation.”
Budget Blues
Don Jewell, GPS World’s contributing editor for defense, has written at length about the GPS III and OCX situations in his February newsletter column, “USAF FY16 Budget Plus $10B More, Please!”. We condensed some of his remarks, particular to the budget battle on Capitol Hill, for the Out in Front column of the March issue of the magazine, due out soon. Here is a further digest of those comments.
The 2016 President’s Budget, submitted in February, contains an Air Force requested a budget of $122.2 billion. This may be too little, too late.
On the satellite side of the house, GPS III has problems centering on development and delivery issues with a subcontractor. In this case, however, the whole satellite program is not failing, just a component, albeit an important one: the Mission Data Unit (MDU).
For GPS III+, the Air Force plans for a two-phased competition process: a Production Readiness competition for up to three firm-fixed price contracts to mature competitors’ production designs for a competition in a full and open competition for up to 22 GPS III Production SVs [satellite vehicles] with an expected award in FY17/18.
This sounds great if you need an entirely new GPS III system, which consists of, at a minimum, a new payload, satellite, launcher and ground C2 system. In fact, the government only needs an MDU. Failure to produce the MDU on time has delayed GPS III by 18 months to date.
More troubling are the government proposals to entertain other bids to finish the second half of the GPS III constellation. Such a competition or re-bid will take at least three years and cost hundreds of millions of dollars — and Lockheed Martin may well win again in the end
A significant added cost to the GPS budget concerns the need for a new ground C2 system if the total new systems approach is taken. If preliminary elements of the GPS space segment are developed without cross-checking the impact to the GPS control segment, technical, operational, budgetary and schedule impacts will be significant.
The already perturbed OCX budget likely has not considered the integration costs of a newly developed, yet-to-be-procured GPS III+ SV. OCX today is geared for the GPS III already contracted for, and it is failing to meet that challenge.
Budget constraints are tight and getting tighter, mandating the Air Force “do more with less” in every context. For GPS III SVs, this should — but by no means necessarily does — indicate developing an alternate MDU rather than buying a new block of GPS SVs.
Volvo Cars has a complete system solution that makes it possible to integrate self-driving cars into real traffic, with ordinary people in the driver’s seat. The automaker presented its planned system in an online press conference Feb. 19.
“We are entering uncharted territory in the field of autonomous driving,” said Peter Mertens, senior vice president of Research and Development, Volvo Car Group. “Taking the exciting step to a public pilot, with the ambition to enable ordinary people to sit behind the wheel in normal traffic on public roads, has never been done before.”
As the Drive Me project enters its second year, Volvo is moving toward its goal of placing 100 self-driving cars in the hands of customers on selected roads around Gothenburg by 2017. The public pilot — a collaboration between legislators, transport authorities, a major city and a vehicle manufacturer — is a central component of Volvo’s plan to achieve sustainable mobility and ensure a crash-free future.
Early prototype cars are now being tested on the DriveMe route in and around Gothenburg, Sweden.
Volvo’s production-viable autonomous driving system is based on a complex network of sensors, cloud-based positioning systems and intelligent braking and steering technologies.
“Autonomous driving will fundamentally change the way we look at driving. In the future, you will be able to choose between autonomous and active driving,” Mertens said. “This transforms everyday commuting from lost time to quality time, opening up new opportunities for work and pleasure.”
Volvo’s autopilot system is designed to be reliable enough to allow the car to take over every aspect of driving in autonomous mode, Volvo said. The technology advances a crucial step beyond the automotive systems demonstrated so far since it includes fault-tolerant systems, the carmaker said.
“It is relatively easy to build and demonstrate a self-driving concept vehicle, but if you want to create an impact in the real world, you have to design and produce a complete system that will be safe, robust and affordable for ordinary customers,” said Erik Coelingh, technical specialist at Volvo Cars.
The main challenge is to design an autopilot that is robust for traffic scenarios as well as for technical faults that may occur. The driver can’t be expected to suddenly intervene in a critical situation. Initially, the cars will drive autonomously on selected roads with suitable conditions, such as without oncoming traffic, cyclists or pedestrians.
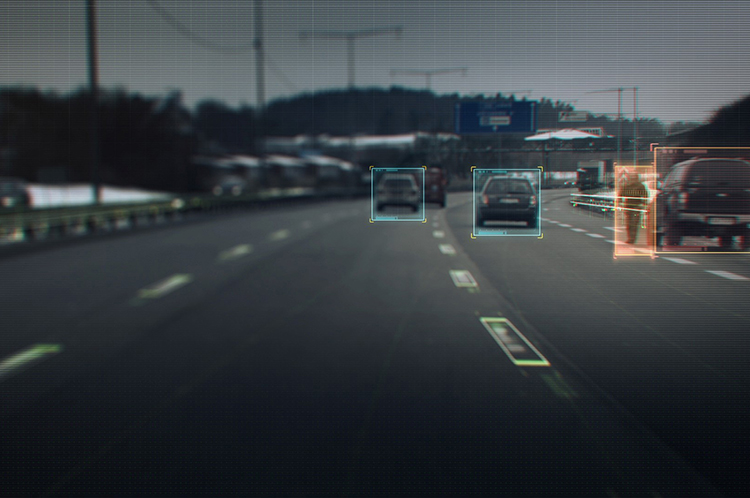
Volvo’s system generates exact positioning and a complete 360° view of the car’s surroundings through a combination of radars, cameras and laser sensors. A network of computers processes the information, generating a real-time map of moving and stationary objects in the environment.
“Making this complex system 99 percent reliable is not good enough. You need to get much closer to 100 percent before you can let self-driving cars mix with other road users in real-life traffic,” Coelingh said. “Here, we have a similar approach to that of the aircraft industry. Our fail-operational architecture includes backup systems that will ensure that the autopilot will continue to function safely if an element of the system were to become disabled.”
For example, the probability of a brake system failure is very small, but a self-driving vehicle needs a second independent system to brake the vehicle to a stop, because it is unlikely that the driver will be prepared to press the brake pedal.
On the road, the complete technology solution is designed to handle even the most complicated scenarios, from smooth commuting to heavy traffic and emergency situations, Volvo said. “Just as good drivers would, potentially critical situations are approached with sensible caution. In a real emergency, however, the car reacts faster than most humans,” Coelingh said.
When autonomous driving is no longer available — because of weather, technical malfunction or the end of the route has been reached — the driver is prompted by the system to take over again. If the driver is incapacitated for any reason and does not take over in time, the car will bring itself to a safe place to stop.
Volvo expects that autonomous driving could cut fuel consumption, improve traffic flow, and open up possibilities for urban planning and more cost-efficient investments in infrastructure.
“Developing a complete technological solution for self-driving cars is a major step. Once the public pilot is up and running, it will provide us with valuable knowledge about implementing self-driving cars in the traffic environment, and help us explore how they can contribute to sustainable mobility,” Coelingh said. “Our smart vehicles are a key part of the solution, but a broad societal approach is vital to offer sustainable personal mobility in the future. This unique cross-functional cooperation is the key to a successful implementation of self-driving vehicles.”
Drive Me system components:
The 76-GHz frequency-modulated, continuous wave radar is placed in the windscreen and combined with a camera to detect objects on the road. Four radars behind the front and rear bumpers locate objects in all directions. Long-range radars in the rear ensure a good rearward detection of vehicles in parallel lanes.
Sensor technologies. Volvo Cars is developing a holistic solution that generates exact positioning and a complete 360-degree view of the car’s surroundings. This is achieved by a combination of multiple radars, cameras and laser sensors. A redundant network of computers processes the information, generating a real-time map of moving and stationary objects in the environment.
Precise positioning is based on this surround information together with GPS and a high-definition 3D digital map that is continuously updated with real-time data. The system is reliable enough to work without requiring driver supervision.
Combined radar and camera. The combined 76-GHz frequency-modulated continuous wave radar and camera placed in the windscreen is the same as that in the new XC90. This system reads traffic signs and the road’s curvature and can detect objects on the road such as other road users.
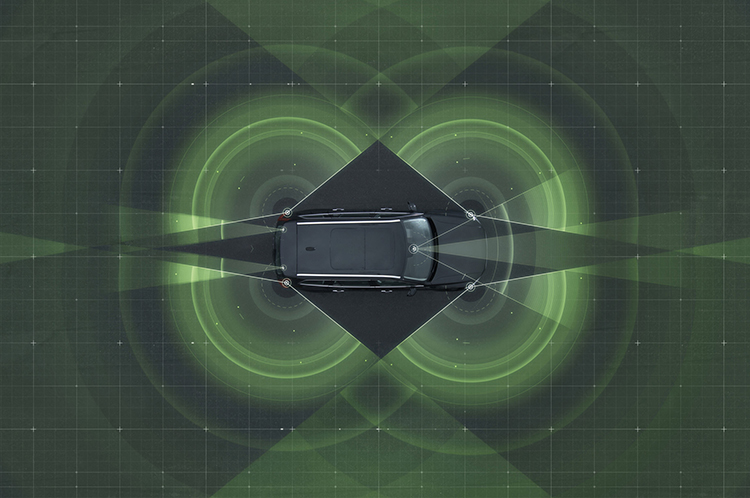
Surround radars. Four radars behind the front and rear bumpers (one on each corner of the car) are able to locate objects in all directions. By sweeping both left and right, transmitting waves that bounce off signs, poles, and tunnels, they monitor a full 360-degree around the car.
360-degree surround vision. Four cameras monitor objects in close proximity to the vehicle. Two are under the outer rear-view mirrors, one is in the rear bumper and one is in the grille. Besides detecting objects at close range, these cameras monitor lane markings. The cameras have a high dynamic range and can handle quick changes in lightning conditions, such as when entering a tunnel.
Multiple beam laser scanner. This sensor system is placed in the front of the vehicle, below the air intake. The scanner can identify objects in front of the car and ensures very high angle resolution. It can also distinguish between objects. The laser sensor has a range of 150 meters for vehicles and covers a 140-degree field of view.
Trifocal camera. A trifocal camera placed behind the upper part of the windscreen is three cameras in one, providing a broad 140-degree view, a 45-degree view and a long-range, yet narrow, 34-degree view for improved depth perception and distant-object detection. The camera can spot suddenly appearing pedestrians and other unexpected road hazards.
Long-range radars. Two long-range radars placed in the rear bumper of the car ensure a good rearward field of view. This technology is useful when changing lanes because it can detect fast-moving vehicles approaching from far behind.
Ultrasonic sensors. Twelve ultrasonic sensors around the car are used to identify objects close to the vehicle and support autonomous driving at low speeds. The sensors are based on the technology used for current park-assist functions enhanced with advanced signal processing. This technology is useful for detecting unexpected situations, such as pedestrians or hazards on the road close to the car.
High-definition 3D digital map. A high-definition 3D digital map provide the vehicle with information about the surroundings, such as altitude, road curvature, number of lanes, geometry of tunnels, guard rails, signs, and exits. The position geometry is in many cases at centimeter level.
High-performance positioning. The high-performance GPS is one part of the positioning control that is enhanced by a combination of an advanced GPS, a three-degrees-of-freedom accelerometer and a three-degrees-of-freedom gyro. By matching the 360-degree image created by the multitude of sensors with the map image, the car will get the information about its position in relation to the surroundings.
By combining the information from the sensors and the map, the Drive Me car is able to choose the best course in real time, factoring in variables such as the curvature of the road, speed limit, temporary signs and other traffic.
Cloud services. The cloud service is connected to the traffic authorities’ control center. This ensures that the most up-to-date traffic information is always available. Control center operators also have the ability to tell the drivers to turn off the autonomous drive mode if necessary.
All Phase One Industrial aerial cameras now fully support the IGI AEROcontrol, GNSS/IMU positioning system, the companies announced. Aerial camera models include iXA-R, iXA, and iXU.
Phase One aerial cameras are high-quality industrial-grade camera systems, which have found wide success in the photogrammetry market, both among end users and OEM integrators.
AEROcontrol is a GNSS/IMU system for the precise determination of position and altitude of multiple airborne sensors. Beside the choice of MEMS- and FOG-based IMUs, the system is also suitable for mobile mapping applications. Used together with IGIplan and CCNS-5, a complete and comprehensive solution for mission planning, aircraft guidance with sensor management and geo-referencing is available to Phase One aerial camera users.
“With the addition of IGI’s AEROcontrol, users of Phase One aerial cameras are able to use IGI’s popular AEROcontrol, GNSS/IMU positioning system with a single camera or as part of an array,” said Dov Kalinski, general manager of Phase One Industrial.
“With the integration of the IGI AEROControl GNSS/IMU with the Phase One aerial cameras, all Phase One users now have access to geo-referencing with different IGI IMU models and IMU-based, precise stabilized mount control. This smart geospatial solution helps users obtain the best possible aerial photography results,” added Philipp Grimm, IGI marketing and sales manager.
Galileo’s Ground Mission Segment in the Fucino Control Centre in Italy oversees Galileo navigation services and satellite payload operations.
News from the European Space Agency
In Roman times the milestone was the central method of navigation, with all distances fixed from a ‘golden milestone’ in the imperial capital. Today, navigation satellites have become the modern equivalent of milestones — but Rome still has a role to play.
Inside the Galileo System Evaluation Equipment facility, based at Thales Alenia Space in Rome.
The Thales Alenia Space plant in the eastern suburbs of Rome is home to the Galileo System Evaluation Equipment facility, which provides a troubleshooting platform for the Galileo ground network and an assessment of the performance of Europe’s under-construction satnav constellation.
Based in the main plant building, it is equipped with a secure data link to the Galileo Control Centre in Fucino, 90 km away, which oversees Galileo navigation services. This link gives it direct access to all the data gathered by the global ground segment, from the sensor station data to the navigation messages uplinked to the satellites, including satellite orbits and onboard clock corrections.
The facility can then apply separate software to these inputs, rather than that used in the Galileo Mission Segment, to provide a “second opinion” on Galileo performance. In addition, a van measures Galileo performance in the field, gathering data across a range of vehicle and rural environments.
The River Tiber flows through the historic centre of Rome, seen in high-resolution detail by France’s Spot-5 satellite.
“The facility is being routinely operated by the Thales Alenia Space team,” explains Enrico Spinelli, overseeing it on the ESA side. “It is being upgraded to automatically process the data received from the Galileo control centres, perform troubleshooting analyses and provide inputs for the monthly Early Service Key Performance Indicators report. These reports are provided in turn to the European Commission’s European Global Navigation Satellite System Agency, as part of Galileo’s Early Services preparatory activities.”
The facility made the Rome area one of the two main centres of activity during Galileo’s In-Orbit Validation phase, along with the ESA’s ESTEC technical centre in Noordwijk, the Netherlands. In-Orbit Validation was the extensive system testing performed on the ground during late 2012 and early 2013 to ensure the embryonic four-satellite system was performing as designed, including Galileo’s historic first position fix of longitude, latitude and altitude on March 12, 2013.
The Galileo System Evaluation Equipment facility hosted at Thales Alenia Space in Rome is equipped with a van measures Galileo performance in the field, gathering data across a range of vehicle and rural environments.
“The facility was developed for that phase, but has performed so well that it was decided to keep it in operation during succeeding phases,” adds Enrico. “Along with its intended use in monthly reporting, its direct access and processing of Galileo Control Centre data will make it a powerful tool for system troubleshooting for both Galileo’s upcoming services. It can give us independent analyses of factors such as the availability and quality of data from Galileo Sensor Stations and the Orbit Determination and Time Synchronisation process which keeps the overall Galileo system in sync.
“It can also allow us to check the accuracy of software models used to compensate for ionospheric delay, the accuracy of almanacs charting satellite orbital positions and to analyze the efficiency of the ground-to-satellite contact plans for the uplink of the navigation message which the satellites rebroadcast, even to verify the navigation message is being broadcast in its correct structure.”
The improved facility should help to ensure the timely and reliable introduction of initial Galileo services, planned in 2016.
To meet the needs of high-accuracy field data collection and better workflow with modern GNSS technology, Supergeo’s latest SuperSurv GIS mapping app allows users to connect with and operate external Bluetooth GNSS devices. The app also elevates field-work efficiency with new averaging algorithms.
SuperSurv is designed for field data collection on Android and iOS-powered devices. Integrating with GIS and GPS technologies, SuperSurv provides functions like Map Display, Query, Measure, and supports to overlay OpenStreetMap as the basemap. Also, users can capture point, line and polygon features and attribute data, and save the data as SHP or GEO format in both offline and online modes.
With the new external GNSS device connection function, users can choose between internal positioning information and an outer GNSS source via Bluetooth. When pairing the GNSS receiver with an Android device, SuperSurv allows users to fully control and present detailed messages of navigation within system status. In addition, data collection via GNSS is enhanced with options such as a coordinate data averaging function or vertex collecting threshold, bringing users modernized and highly accurate field survey experience.
The external GNSS device connection and advanced data-collecting functions are fully supported and available with the SuperSurv Pro version. For SuperSurv M3 users, the newly added functions come as an optional plug-in that users can purchase and download.
The Flight Model #3 (FM3) spacecraft is moved for positioning on the payload dispenser. (Photo credit: Arianspace)
The third and fourth Galileo Full Operational Capability (FOC) satellites are a confirmed “fit” for their Arianespace Soyuz launch March 27, having made initial contact with the mission’s dual-payload dispenser in French Guiana, according to Arianespace.
The fit check was completed over a two-day period inside the Spaceport’s S1A payload preparation building. The two satellites were installed separately, with the Flight Model #3 (FM3) spacecraft integrated on — and subsequently removed from — the dispenser on Feb. 9. Flight Model #4 (FM4) underwent the same process the following day.
The payload dispenser for Galileo was developed by RUAG Space Sweden for Arianespace, and carries one satellite on each side. It will deploy the spacecraft during the Soyuz launch by firing a pyrotechnic separation system to release them in opposite directions at the orbital insertion point.
Flight Model #4 (FM4) after its integration. (Photo credit: Arianspace)
Final integration on the dispenser is to be performed during upcoming processing at the spaceport, and will be followed by the completed unit’s installation on Soyuz.
The March 27 mission — designated Flight VS11 in Arianespace’s numbering system — will be the company’s fourth launch carrying spacecraft for the Galileo constellation. FM3 and FM4 were built by OHB System, with Surrey Satellite Technology Ltd. supplying their navigation payloads.
The Galileo network’s complete operational and ground infrastructure will be deployed during the Full Operational Capability phase, which is managed and funded by the European Commission. The European Space Agency has been delegated as the design and procurement agent on the commission’s behalf.
Fugro has launched the G4 service, designed to provide GNSS augmentation for offshore positioning applications. The new satellite correction service takes advantage of all four GNSS: GPS, GLONASS, BeiDou and Galileo.
By using all available GNSS satellites, Fugro’s G4 service is designed to improve availability and reliability of offshore positioning and thus enhance the safety and productivity of a wide range of survey and other activities offshore. G4 represents a significant advancement compared to augmentation systems which are based on GPS-only or GPS + GLONASS, the company said.
The BeiDou system operated by China currently provides coverage in the Asia-Pacific region. Fugro’s G4 service already utilises the first BeiDou satellites and is ready to start using the Galileo satellites as soon the EU announces Initial Operational Capability (IOC) status for this system. Galileo and future BeiDou satellites will be automatically included as they come online, steadily increasing availability and robustness of the integrated augmentation service.
The new G4 service will be particularly beneficial when the line-of-sight to certain satellites is obstructed by offshore structures – a key consideration during critical positioning operations. The G4 augmentation signals, transmitted via seven high–powered communication satellites to provide at least two independent broadcast channels anywhere in the world, will offer Fugro’s customers unrivalled coverage and availability.
GPS World, the leading publication serving the GNSS Industry, is pleased to announce the industry’s first online buyers guide — gpsworldbuyersguide.com — featuring access to information on hundreds of manufacturers, products and services.
“We’ve taken the GPS World Buyers Guide in print, which we’ve been publishing for 20+ years, to an entirely new level,” said Alan Cameron, editorial director and group publisher of GPS World. “Adding a robust online version offers many benefits to the industry.”
Engineers, integrators, professional end-users and others in search of products and services will continue to have two resources available to them — the print Buyers Guide publishing in June — and the cutting-edge, robust version accessible 24/7 at: gpsworldbuyersguide.com.
Visitors can search for manufacturers by name or location. Products and services are searchable by name or via the following categories:
Vehicle location/tracing workstations and systems (computer-aided dispatch)
These categories are also searchable by sub-categories.
Manufacturers and suppliers are now in control of their listings year-round by having the ability to make listing updates in real time. Listings are free and numerous upgrades are available. Listings found at gpsworldbuyersguide.com will automatically be used to create the print version of the directory.
“GPS World’s new online product offers many economical ways for a manufacturer or supplier to enhance their exposure,” said Steve Copley, GPS World publisher. “We’re excited to offer an online element to our print product and provide a positive experience for users.”
Manufacturers and suppliers are encouraged to review their current listings by using the search functionality found on the directory’s home page. Manufacturers and suppliers not listed in directory are encouraged to create a new listing. All questions relating to the online directory should be directed to Chloe Kalin, Buyers Guide Marketing & Sales Manager, at 216-363-7929.
The German Galileo test and development infrastructure GATE has been recertified to serve as a Galileo open‐air test laboratory, for receiver integrity testing (RAIM) for safety‐of‐life (SoL) applications, and for Galileo SIS ICD conformance of signal characteristics and signal quality.
The GATE facility, in Berchtesgaden, is operated by IFEN GmbH. Certification was conducted by TÜV SÜD, an international service corporation focusing on consulting, testing, certification and training.
GATE consists of eight transmitting stations that emit Galileo signals in the GATE test area in Berchtesgaden, as well as two monitoring stations that receive and process these signals.
For application tests, it is essential for GATE to provide constant Galileo specifications for tests, including position accuracy, signal spectrum and navigation data. This is necessary for both test types: tests with the eight “GATE satellites” only and tests with simultaneously usage of the already-existing Galileo satellites in orbit.
The compliance to the specification was verified by the company NavCert GmbH from Braunschweig, Germany, in a recertification of the GATE test bed. Compared to a full certification, taking place every three years, a recertification only verifies the compliance to the specification by the use of random inspections though tests in GATE.
The recertification also includes an audit of the operation processes of the operating company IFEN GmbH. Here, the implementation and adherence to process procedures for GATE operation were verified. This includes questions such as whether a sufficiently technical skilled team is available for operating GATE, if the performed application tests are documented in a reproducible way, and how the GATE team handles non‐conformances to the specification and improvements to the system.
With finalization of the recertification work, the GATE certificate was extended by TÜV SÜD to January 2016. Because of this, GATE customers can rely on the independent verification of the GATE test and development environment for upcoming testing activities, IFEN said.
As an add‐on, customers of IFEN’s NavX‐NCS GNSS simulator benefit from the recertification by obtaining a confirmation from an independent organization (TÜV Süd), reassuring the functionality of GPS and Galileo signal characteristics and signal quality as per SIS ICD, IFEN said.












 GPS World, the leading publication serving the GNSS Industry, is pleased to announce the industry’s first online buyers guide —
GPS World, the leading publication serving the GNSS Industry, is pleased to announce the industry’s first online buyers guide —