The Federal Communications Commission (FCC) is investigating whether the use of Russian and Chinese foreign satellite systems by U.S. mobile phones and other devices poses security threats.
The FCC has concerns that U.S. handheld devices are receiving and processing GNSS signals from satellites controlled by foreign adversaries in violation of commission rules.
The FCC is seeking answers from handset manufacturers Apple, Google, Motorola, Nokia, Samsung and others that collectively cover more than 90% of the U.S. smartphone marketplace.
“There is no established record of what security threats, if any, these signals carry and whether the manufacturers of handheld devices are processing these signals in violation of the Commission’s rules,” an FCC spokesperson said in a statement.
Representative Mike Gallagher, chair of the U.S. House Select Committee on the Strategic Competition Between the United States and the Chinese Communist Party, wrote FCC Chair Jessica Rosenworcel earlier this week raising concern about reports that U.S. cell phones were receiving and processing signals from Chinese and Russian satellites.
The FCC has only approved U.S. phones to receive and process signals from the U.S. Global Positioning System (GPS) and the European Galileo GNSS.
Peter Thompson, Ph.D., CEO of NPL, left, with Jim McDonald, professor at the University of Strathclyde. (Image: NPL)
The National Physical Laboratory (NPL) has marked the inauguration of the first of three innovation nodes designed to enhance the United Kingdom’s capabilities in the development of time-critical technologies. The initiative is aimed at sectors such as transport, telecommunications, fintech and quantum with the application of accurate and precise timing.
In a collaborative effort between NPL and host organizations, including the University of Strathclyde, the University of Surrey and Cranfield University, the Innovation Nodes stand as a cornerstone of NPL’s National Timing Centre Programme. It represents the UK’s nationally distributed time infrastructure and offers secure, reliable, resilient and highly accurate time and frequency data. This infrastructure is crucial for the development of new technologies in time-critical 5G and 6G applications, next-generation automated factories and connected autonomous vehicles.
Throughout the development phase, the node sites at the Universities of Strathclyde, Surrey and Cranfield have hosted feasibility and demonstrator projects funded by Innovate UK, the United Kingdom’s innovation agency. These projects have benefited from technical consultancy and access to high-accuracy timing signals, which encourage the development of new products and services. These initiatives were created as an effort to establish an evidence base for redistributing positioning, navigation and timing (PNT) data to air and ground-based autonomous systems within a smart city infrastructure. This will ensure the safety, reliability and security of autonomous transport.
NPL welcomes collaboration with industry and academia to leverage the Innovation Nodes for access to traceable and high-accuracy timing signals and promises to stimulate further innovation and development in critical sectors.
Professor Paul Griffin of Strathclyde’s Department of Physics pointed out the vulnerabilities of GNSS to jamming and spoofing, underscoring the NTC’s mission to provide robust timing for the UK independent of GNSS. The initiative includes the use of atomic clocks at Anthorn in Cumbria, aligning with UTC through the NPL Time Over eLoran (NTOL) project, led by Chronos Technology. This project demonstrates the transmission of NPL’s timebase via eLORAN and its decoding by Strathclyde’s Power Networks Demonstration Center (PNDC), which is a significant advancement in securing the country’s timing infrastructure against potential threats.
Working in agriculture means facing a variety of challenges imposed by nature. Unfavorable weather conditions, such as irregular rainfall, strong winds and hail, are common obstacles for producers and companies involved in the sector. Additionally, a recent rise in solar flares has caused headaches for those who rely on precision agriculture technologies, such as satellite positioning technologies, to operate farm machinery.
Ionospheric scintillation is a phenomenon that causes rapid and irregular variations in the power of radio frequency signals that travel through the ionosphere, a region of the Earth’s atmosphere that has ionized particles, which makes it capable of reflecting and refracting radio signals, such as those used in satellite communications and GNSS.
These variations in the power of radio signals occur due to disturbances in the concentrations of free electrons in the ionosphere, which various factors, including solar activity, geomagnetic events and weather conditions in the upper atmosphere can influence. Fluctuations in the electron density of the ionosphere cause distortions in radio signals, leading to fluctuations in the signal’s power and phase. Some of the consequences of this phenomenon are almost imperceptible, such as a deviation of 1 m or 2 m in the position calculated by your cell phone’s GPS receiver. When it comes to precision farming, however, a few centimeters of error in machine positioning can severely impact operations by increasing input waste, reducing efficiency and decreasing production.
Many farmers, especially in Brazil, plant and harvest two crops a year, and rely on precision farming technology to sow and harvest quickly and accurately. With an estimated production of 317.5 million tons for the 2023/24 harvest, according to the Brazilian National Supply Company (Conab), these producers have buffer time to keep their machines idle. During planting and harvesting periods, farms often operate 24 hours a day, 7 days a week, and precise positioning via GNSS is essential for using solutions such as auto-steering and traffic control. When ionospheric scintillation affects the performance of location systems, it causes delays and inaccuracies, directly impacting the productivity of farms and damaging the operations’ efficiency and profitability.
To mitigate the impacts caused by ionospheric scintillation, as well as other problems that can affect receivers, farmers have several GNSS correction options at their disposal, such as precise point positioning (PPP) and real-time kinematics (RTK). These alternatives aim to increase positioning accuracy for high-precision applications and create different levels of resilience against ionospheric interference. However, it can still affect these services, causing errors in the receiver’s position calculations. In RTK systems, which rely on carrier phase measurements, scintillation can drastically impair positioning accuracy, especially at greater distances from the base station.
To overcome scintillation challenges, PPP positioning is a more reliable option. Unlike RTK, PPP estimates ionospheric errors at the receiver’s location and does not depend on corrections from a local base station. This allows users to achieve high precision anywhere within the global coverage area, regardless of the distance from the base station. In addition, PPP takes into account the immediate ionospheric environment, making it less sensitive to changes in atmospheric activity.
A study by Hexagon | NovAtel in 2020, analyzed the ionospheric activity in the central-western region of Brazil, comparing a standard RTK positioning solution and the PPP TerraStar-C PRO positioning solution, developed by NovAtel. A 24-hour data collection captured the nocturnal impacts of ionospheric activity and yielded some insights: while RTK position performance at 10 km from the base station was degraded for many hours, showing errors of up to 25 cm, the receiver using TerraStar-C PRO corrections continues to experience centimeter-level accuracy, with shorter maximum deviations of up to 10 cm.
In summary, ionospheric scintillation is a growing challenge for precision agriculture, affecting the productivity and efficiency of agricultural operations. To minimize its impacts, the adoption of correction services such as TerraStar-C PRO has proven to be a resilient and reliable solution, allowing farmers to continue their operations accurately and effectively, even in challenging conditions. The development of increasingly advanced precision solutions is crucial to ensuring the success of agriculture.
FrontierSI, a not-for-profit research organization specializing in positioning, geodesy, spatial infrastructures and rapid spatial analytics, has released a review of Australia’s resilient positioning, navigation and timing (PNT) policy to fortify the country’s PNT infrastructure. The review, expanded upon in a new white paper and technical report, was created in response to the increasing number of cyber threats.
“PNT is an essential utility we presently have no control over,” said Joshua Critchley-Marrows, FrontierSI’s space PNT lead. “Australia’s access to PNT is intrinsically linked to satellite-delivered services from foreign-owned and operated assets, such as the USA’s Global Positioning System (GPS). Investing in our infrastructure is crucial to ensure continuous access to this critical service that underpins nearly all aspects of our daily lives.”
According to FronteirSI, the reliance on foreign satellite systems exposes Australia to significant vulnerabilities, such as recent technological failures and cyber-attacks. These incidents emphasize the need for a self-reliant and robust PNT ecosystem capable of withstanding both unintentional and malicious disruptions.
FrontierSI aims to bolster PNT resilience by enhancing the systems’ robustness against disruptions and advocating for the development of assured, robust, augmented and alternative PNT solutions. The recommendations outlined in the white paper and technical report call for proactive measures, including legislative updates and supply chain risk assessments, to protect Australia’s critical infrastructure and economic vitality.
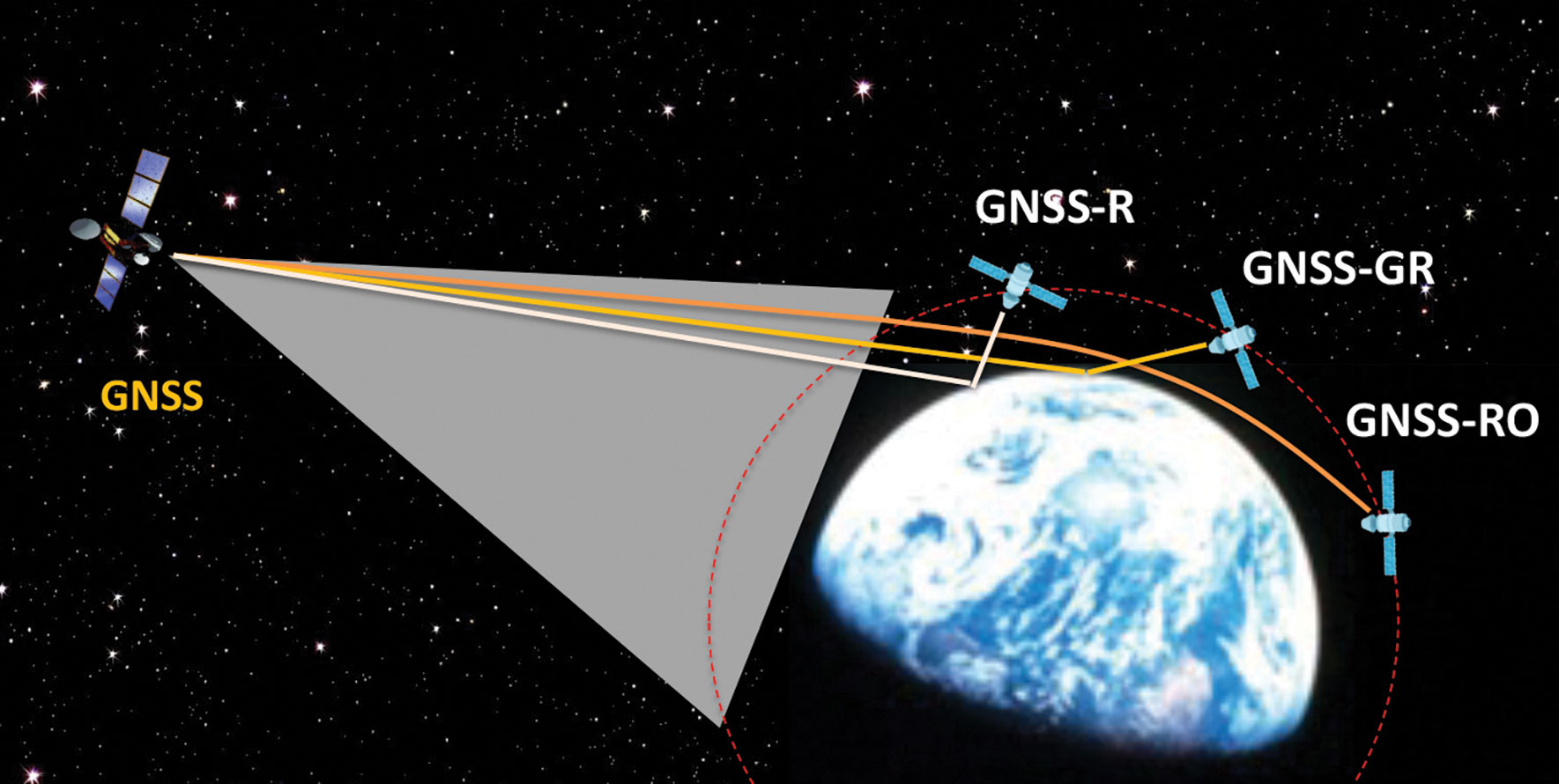
Figure 1: Scientific observations with GNSS radio occultation (GNSS-RO), GNSS grazing-angle reflectometry (GNSS-GR) and GNSS reflectometry (GNSS-R) techniques from low-Earth orbit (LEO). (Figure provided by the author)
Global navigation satellite systems (GNSS) for peaceful uses are facing a hard reality due to increasing regional conflicts in recent years. As a dual-use technology, GNSS for civil, commercial and scientific applications is vulnerable to both denied/degraded service and flex power operation from GNSS satellites and to jamming from the ground.
One of the vulnerable scientific applications is the use of GNSS receivers on low-Earth orbit (LEO) satellites that utilize the civil navigation signals for Earth observation. These remote sensing techniques, such as GNSS radio occultation (GNSS-RO), GNSS grazing-angle reflectometry (GNSS-GR) and GNSS reflectometry (GNSS-R) (see figure 1), are designed to observe weak GNSS signals either bounced off from Earth’s surface or refracted by the atmosphere. Thus, GNSS flex power operation and intentional radio frequency interference (RFI) can severely degrade the quality of the scientific data or even prevent Earth observation.
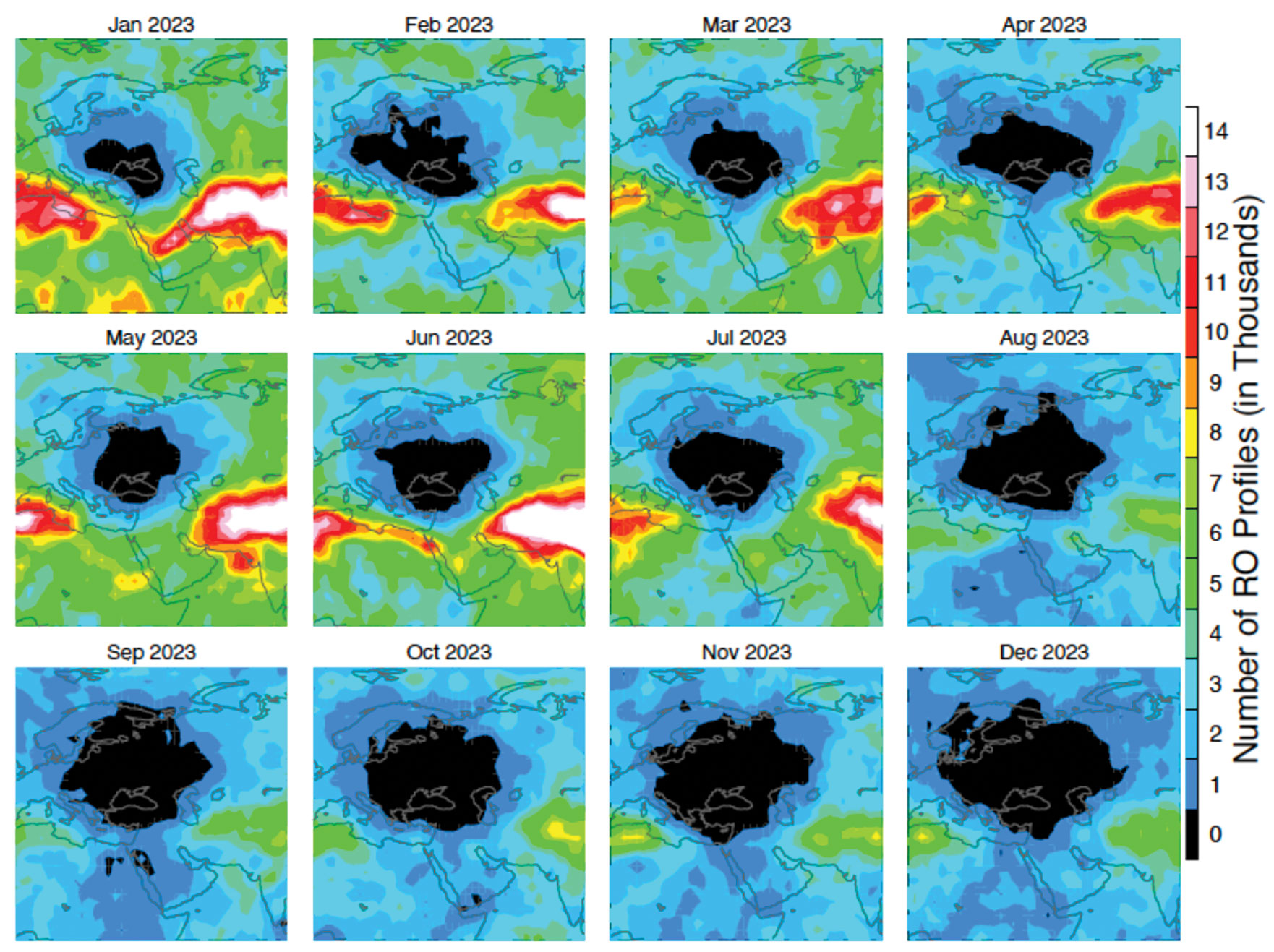
One example of such impacts is a dramatic decrease of GNSS-RO observations over Europe and the Middle East during 2023. Monthly statistics from Spire show the region without GPS-RO measurements grew substantially from the localized Ukraine-Russia conflict zone in January to a much wider area in Eastern Europe and the Middle East in December 2023 (see figure 2).
Figure 2: Number density distribution of monthly GNSS-RO measurements from the GPS tracking by the Spire constellation over Europe and the Middle East in 2023. The black area indicates no data. (Figure provided by the author)
This vast data void in the science observation is likely a result of the intensified electronic warfare used in Ukraine-Russia and the nearby conflict regions. The Spire RO receivers are configured to track the civil signals from GPS, GLONASS and Galileo. To increase signal protection against jamming in a conflict zone, GNSS service providers often use flex power operation. However, flex power operations can cause poor quality tracking with the RO receiver due to weaker signal power. Unlike a precise orbit determination (POD) antenna, the GNSS-RO antennas typically have a high gain to improve the detection of weak GNSS signals at limb and occulted views. However, if the transmitter power of civil signals drops below a quality-control (QC) threshold, the data are flagged as bad. This results in a poor coverage of Spire GNSS-RO in the conflict zones.
Lost or degraded GNSS-RO, GNSS-R and GNSS-GR observations are unfortunate, as these all-weather sensing, long-term stability, and high-accuracy measurements are becoming increasingly important in scientific research. GNSS-RO is a remote sensing technique that uses the GNSS-LEO link to profile Earth’s atmosphere and ionosphere with high vertical resolution. Since the first GNSS-RO six-satellite constellation, known as Constellation Observing System for Meteorology, Ionosphere and Climate-1 (COSMIC-1), these high-quality RO profiles have become a key data source for weather forecasting, climate monitoring, model evaluation, and space weather research. The current backbone of GNSS-RO observations comes from the COSMIIC-2 and Spire constellations, which have been producing more than 20,000 profiles per day since 2020. GNSS-R is a bi-static radar technique that uses the GNSS signals reflected by the surface for altimetry, ocean surface wind speed, wave height sea ice, soil moisture, and inundation measurements. At a view angle between GNSS-RO and GNSS-R, GNSS-GR can provide complementary measurements for sea ice and atmospheric column water vapor. Because of low-cost LEO SmallSat/CubeSat constellations with the GNSS receivers, geoscience studies have benefited greatly from the sampling density and coverage of these new data.
Civilization and science have been diverted by wars before. Despite the increased dependence on GNSS in recent years, their vulnerability to jamming and flex power operation poses a great challenge for scientific observations that need uniform global coverage.
The European Space Agency (ESA) and the European Commission’s Joint Research Centre (JRC) are collaborating to host the 15th edition of the International Summer School on Global Navigation Satellite Systems (GNSS).
The course is scheduled to take place in Novo Mesto, Slovenia, from July 15 to 26, 2024.
The summer school invites graduate students, Ph.D. candidates, postdoctoral researchers, engineers and academics from both the industry and agencies to attend. The wide range of attendees offers a dynamic environment conducive to learning and networking.
The deadline for registration is June 15. Those who register by April 15 will be offered reduced fees. Additionally, the ESA Education Office is offering up to four scholarships.
The comprehensive curriculum of the summer school encompasses all aspects of GNSS, starting from the fundamental principles of satellite navigation to recent advancements in positioning, navigation and timing services.
Participants will have the opportunity to learn from world-leading experts in the field, including ESA Director of Navigation, Javier Benedicto, former ESA Director General, Jean-Jacques Dordain and former ESA Director of Navigation, Paul Verhoef.
The European Union Agency for the Space Program (EUSPA) has published a technical document detailing the main characteristics of the new Galileo Emergency Warning Satellite Service (EWSS).
According to the document, Galileo satellites will transmit emergency warning messages directly to Galileo-enabled smartphones and other navigation devices. The satellites will offer information related to the hazard, such as type, severity, expected onset and duration, as well as the location of the affected area and instructions to follow. The alert content will be generated by national authorities and transmitted to Galileo for broadcast.
“With this new document, some of our key stakeholders can already start to work with this new service,” said Fiametta Diani, head of market, downstream and innovation at EUSPA. “Civil protection authorities in the member states can start to prepare for how they will manage the alert messages they will send via Galileo. The same goes for the receiver and chipset communities, who will have to process this message.”
In 2023, EUSPA began testing the EWSS in different locations in Europe. “We have run trials in Toulouse and in Germany, specifically with a simulated explosion,” Diani said, “like what you might see with an industrial accident. We have also tested a tsunami alert in Cyprus.” The Union is developing the tsunami application together with Japanese partners. EUSPA has also finished flood testing in Belgium and Luxembourg.
EUSPA plans to launch the new EWSS in 2025, Diani said. “As for the receivers, we are working to get our chipset and receiver industry ready,” she said, adding that this process is also supported by the Fundamental Elements program.
Fundamental Elements is an EU funding mechanism that supports the research and development of European GNSS-enabled chipsets, receivers and antennas. The projects are part of the overall strategy for European GNSS market uptake, said EUSPA.
The member states and the correlating national civil protection authorities will initiate warnings, according to Ignacio Alcantarilla Medina of the European Commission.
“[Authorities] will send a message to the Galileo system, and then Galileo will transmit that message through its satellite signals to the users,” he said.
According to EUSPA, the service is designed to be used worldwide to serve as a backup to the already existing mobile network warning systems.
The Global Earth Observation Decentralized Network (GEODNET) Foundation — the organization governing the blockchain-based global navigation network GEODNET — has completed a $3.5 million seed funding round. The round was led by North Island Ventures, with participation from Modular Capital, Road Capital, Tangent, Reverie, and select angels, who join existing GEODNET backers Borderless, IoTeX and JDI Ventures.
The GEODNET Foundation is building a Global Navigation Satellite System (GNSS) reference network for positioning based on real-time kinematics (RTK). Standard GPS is typically off by two meters; however, devices connected to GEODNET’s global RTK network are designed to achieve instant accuracy within 1 cm to 2 cm. Many internet-of-things (IoT) and autonomous applications, such as UAVs, smart mowers and advanced driver assistance systems (ADAS), have shifted to RTK in place of standard GPS positioning, the company said.
GEODNET is a community-based decentralized physical infrastructure network (DePIN). Anyone can contribute to the network by installing and operating a reference station, known as a satellite miner. Satellite miners are designed to deliver precise RTK correction data to devices equipped with GNSS receivers in a range of approximately 20 km to 40 km. By building and participating in the network, satellite mining operators earn GEOD tokens.
GEODNET has more than 4,000 registered reference stations in more than 2,500 cities across 120 countries. GEODNET aims to provide robust precision navigation systems to a variety of industries, including self-driving cars, agriculture, consumer robots, and more.
Iridium Communications, a satellite network operator, will acquire Satelles for $115 million. Satelles is a provider of secure satellite-based time and location services that complement and protect GPS and other GNSS-reliant systems.
While Satelles primarily focuses on providing its satellite time and location (STL) services for digital infrastructure companies, there are potential applications for aviation, the company said. Satelles offers smaller form factor devices that can be integrated with data processing and storage servers to provide critical positioning, navigation and timing (PNT) data.
According to Iridium, the STL service uses the stronger broadcast paging channels of the Iridium satellite constellation to deliver precise timing information. This aims to provide global, secure time and location signals that are more powerful than GNSS constellations, the company continued. The service is resilient to regional GNSS outages, works inside buildings and is being used to secure digital infrastructure for financial markets, governments and major corporations.
The company is now working to reduce the size and cost barriers to improve integration with autonomous systems, consumer devices, vehicles and traditional markets such as aviation, maritime and land mobile. STL can help mitigate GNSS jamming and spoofing, with dedicated STL receivers incorporated into aircraft avionics.
“The most immediate application would be in aviation/Federal Aviation Administration (FAA) ground infrastructure to support PNT resilience in their networks,” Iridium CEO Matt Desch told AIN. “[In the] longer term, there would be an opportunity for avionics providers to build STL into their avionics to protect the integrity of the GPS signals their boxes use and provide a way to tell if GPS signals were compromised or spoofed. We don’t think we’ll be an alternative to GPS or other GNSS applications—only a backup to constantly check signal integrity.”
A long-standing investor in Satelles, Iridium had an ownership stake of 20% from three previous investments in the company. Iridium expects to complete the acquisition in the next few weeks.
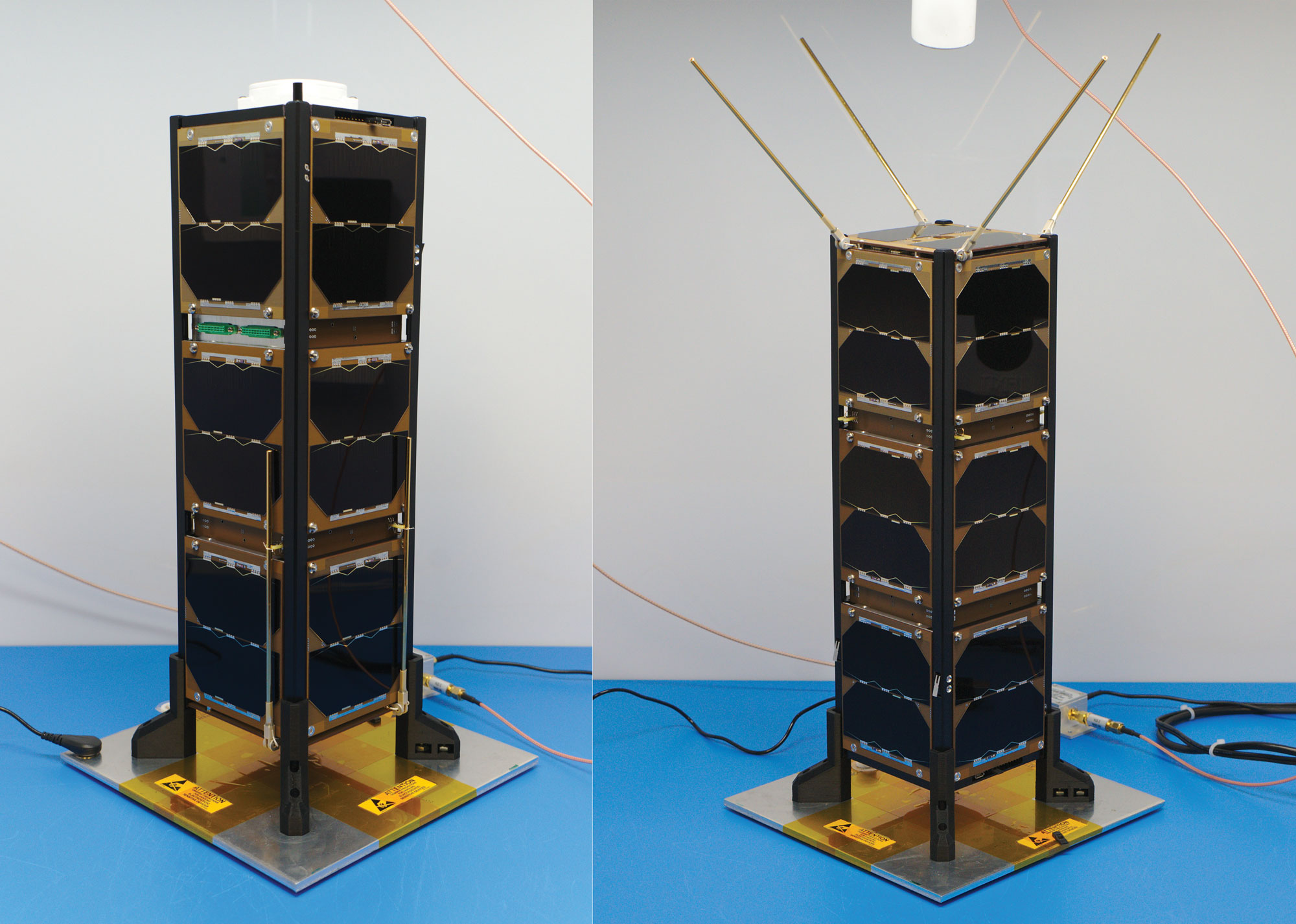
Figure 1: Bobcat-1, with communications antenna stowed (left) and deployed (right). Bobcat-1 measures approximately 10 x 10 x 30 centimeters. (All figures except FIGURE 3 provided by the authors)
Bobcat-1 was a three-unit CubeSat developed and built at Ohio University’s Avionics Engineering Center in Athens, Ohio, and was named after the university’s mascot. FIGURE 1 shows Bobcat-1 with and without its antenna deployed. The satellite was launched to the International Space Station in October 2020 (see FIGURE 2) and deployed into low-Earth orbit (LEO) the following month (see FIGURE 3). In April 2022, it deorbited and burned up in Earth’s atmosphere as planned, after a successful 17-month mission, lasting eight months longer than anticipated. The last signal decoded from Bobcat-1 was received only about 10 minutes before the satellite’s demise, from an altitude of about 109 kilometers, by an amateur radio operator (ZR6AIC) near Johannesburg, South Africa, associated with SatNOGS, a global network of amateur satellite-networked open ground stations.
The main mission of the Bobcat-1 CubeSat was to evaluate the feasibility of GNSS-to-GNSS time offset monitoring from LEO. One of the secondary mission objectives was GNSS spectrum monitoring.
In addition, Bobcat-1 also included a side-mission, hosting a software-defined GPS/Galileo receiver developed by the University of Padova and Qascom — an Italian engineering company providing security solutions in satellite navigation and space cybersecurity — to perform its in-space demonstration and testing. This receiver served as a prototype for the receiver soon to be launched on NASA’s Lunar GNSS Receiver Experiment (LuGRE) mission.
Communications and control of the satellite utilized the 70-centimeter amateur radio satellite band (435-438 MHz) at a typical data rate of 60 kilobits per second and were primarily conducted using a dedicated ground station on the roof of the engineering building at Ohio University (see FIGURE 4). In total, Bobcat-1 collected and downlinked more than 656 megabytes of data during its lifetime. Over the course of the mission, Bobcat-1’s firmware was updated in-orbit on six occasions, allowing for minor enhancements to the data collection system.
Figure 2: Bobcat-1 launches aboard the Cygnus NG-14 resupply mission to the International Space Station. (All figures except FIGURE 3 provided by the authors.)
BACKGROUNDS: GNSS-TO-GNSS TIME OFFSET
GNSS-to-GNSS time offsets — also referred to as GNSS inter-constellation time offsets, inter-system biases or XYTOs — are among the critical parameters for full GNSS interoperability. Users with poor GNSS visibility, such as high-altitude spacecraft, which operate above the GNSS constellations, often do not have enough satellites in view to enable an accurate solution and can experience high dilution of precision. These users could benefit from XYTO estimates provided externally, assuming their receiver-characteristic inter-system biases (ISBs) are calibrated.
To determine a user solution using measurements from a single GNSS constellation, one must solve for four unknown parameters: the user’s spatial coordinates and the receiver-to-system time offset. This means that a minimum of four satellites must be visible to solve for a user solution. If a user has sufficient visibility of satellites from different constellations, a multi-GNSS solution can be determined. However, when applying measurements from multiple constellations, an additional unknown is added for each constellation used. For example, for a user solution incorporating measurements from both GPS and Galileo, one needs to solve for five unknowns: the user’s spatial coordinates, the receiver-to-GPS time offset, and the receiver-to-Galileo time offset. Since each constellation’s time scale is independent of the others, the inter-system time offset between the time scales leads to a prominent bias in a multi-constellation solution. Inter-system time offsets between GPS, Galileo, GLONASS, and BeiDou are generally expected to range from 10 to 100 nanoseconds, resulting in 3 to 30 meters of possible positioning error.
System-to-system time offsets are currently estimated by extensive networks of ground stations, such as those used by the International GNSS Service Multi-GNSS Experiment (MGEX). In addition, GNSS service providers often broadcast XYTO estimates in their navigation messages.
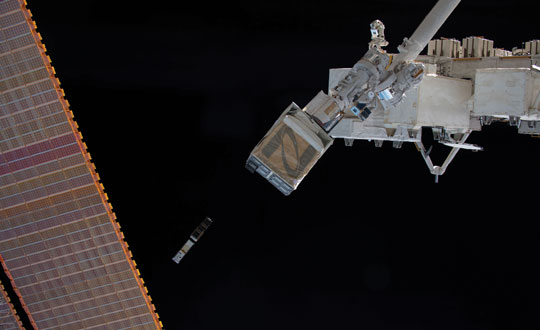
Figure 3: Bobcat-1 is deployed into low-Earth orbit by the Nanoracks CubeSat Deployer alongside SPOC, a CubeSat developed by the University of Georgia. (Photo: NASA)
So, why would estimating XYTOs from LEO be of interest?
Low-Earth orbit enables high GNSS visibility. The approximately 90-minute orbital period allows for observations from nearly all GNSS satellites multiple times per day. This enables high visibility of multiple satellites from each constellation, in turn enabling high observability of constellation parameters such as XYTOs, leveraging satellite-characteristics errors. In addition, tropospheric errors are absent and multipath is limited and can be bounded based on the CubeSat’s dimensions and geometry. Exploiting measurements from LEO could provide additional measurements and independent monitoring of the XYTO estimates provided by ground networks.
However, to estimate system-characteristic XYTOs, the receiver-characteristic biases need to be calibrated. The target is to reach accuracy of approximately 1 nanosecond or possibly lower. Therefore, the error sources need to be evaluated, mitigated, or bounded.
Figure 4: Bobcat-1’s dedicated ground station on the roof of Stocker Center in Athens, Ohio. (All figures except FIGURE 3 provided by the authors.)
Although the ionospheric effects are lower in LEO than on Earth, they cannot be neglected. Therefore, dual-frequency ionospheric delay estimates must be applied. To do so, the receiver’s inter-frequency biases (IFBs), which can introduce errors on the order of nanoseconds, need to be calibrated, as well as the satellite differential code biases (DCBs), orbit and clock errors and receiver antenna group delay. An additional challenge introduced by the LEO environment is the wide range of temperatures to which the receiver is subjected. Over a single orbit, the receiver’s temperature can vary from approximately 0 to 50 degrees Celsius. The effects of these temperature variations cause fluctuations in the receiver’s IFBs, which need to be evaluated and calibrated. Pre-launch measurements in a controlled environment using a climate chamber and two receivers of the same make and model were used for calibration. We have detailed those measurements elsewhere.
The multipath error can be bounded, as a first approximation, to 10 centimeters (or about 0.3 nanoseconds in equivalent signal delay) due to the dimensions of the CubeSat. However, given the mount of the antenna is on one of the CubeSat’s two 10 × 10 centimeter faces, that upper bound is in practice much smaller and the multipath error is mostly negligible.
Finally, the last remaining major error sources to be calibrated are the receiver ISBs. The main goal, to demonstrate the feasibility of LEO-CubeSat-based monitoring of GNSS XYTOs, requires showing the stability (or the repeatability) of the receiver biases in orbit.
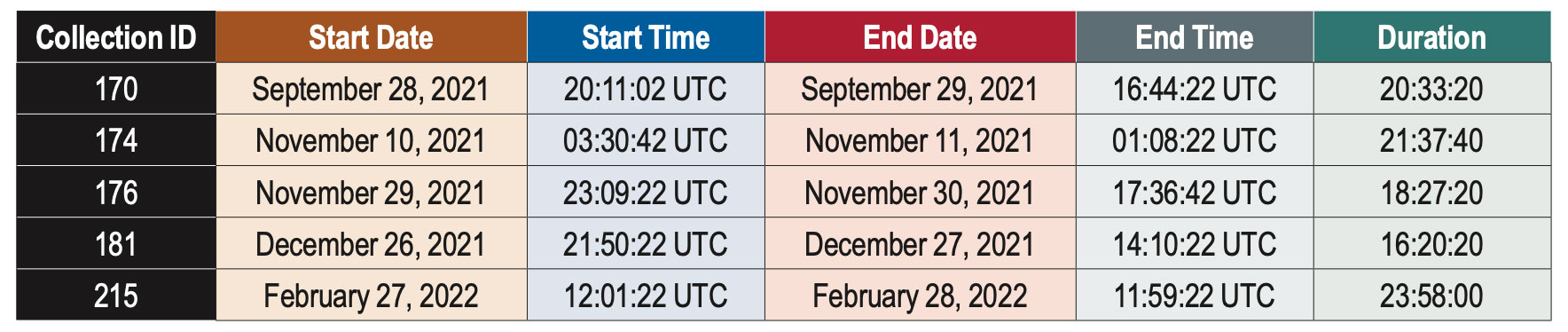
Table 1: Summary of data collections discussed in this article.
DATA COLLECTION
Bobcat-1’s primary payload was a NovAtel OEM719, a triple-frequency multi-GNSS receiver, enabling measurements on all frequencies from GPS, GLONASS, Galileo and BeiDou, as well as the regional navigation satellite systems (RNSSs) QZSS and NavIC. The measurements were collected and downloaded, for post-processing purposes.
Pseudorange and carrier-phase measurements, as well as carrier-to-noise-density ratio estimates, were collected, together with the receiver’s position and velocity estimates, and other parameters such as the temperature measured by the two sensors embedded in the receiver. In limited instances, power spectral density measurements and in-phase and quadrature (I/Q) component samples were collected to support the secondary mission, GNSS spectrum monitoring. The limited downlink capacity of the satellite constrained these measurements to short time intervals.
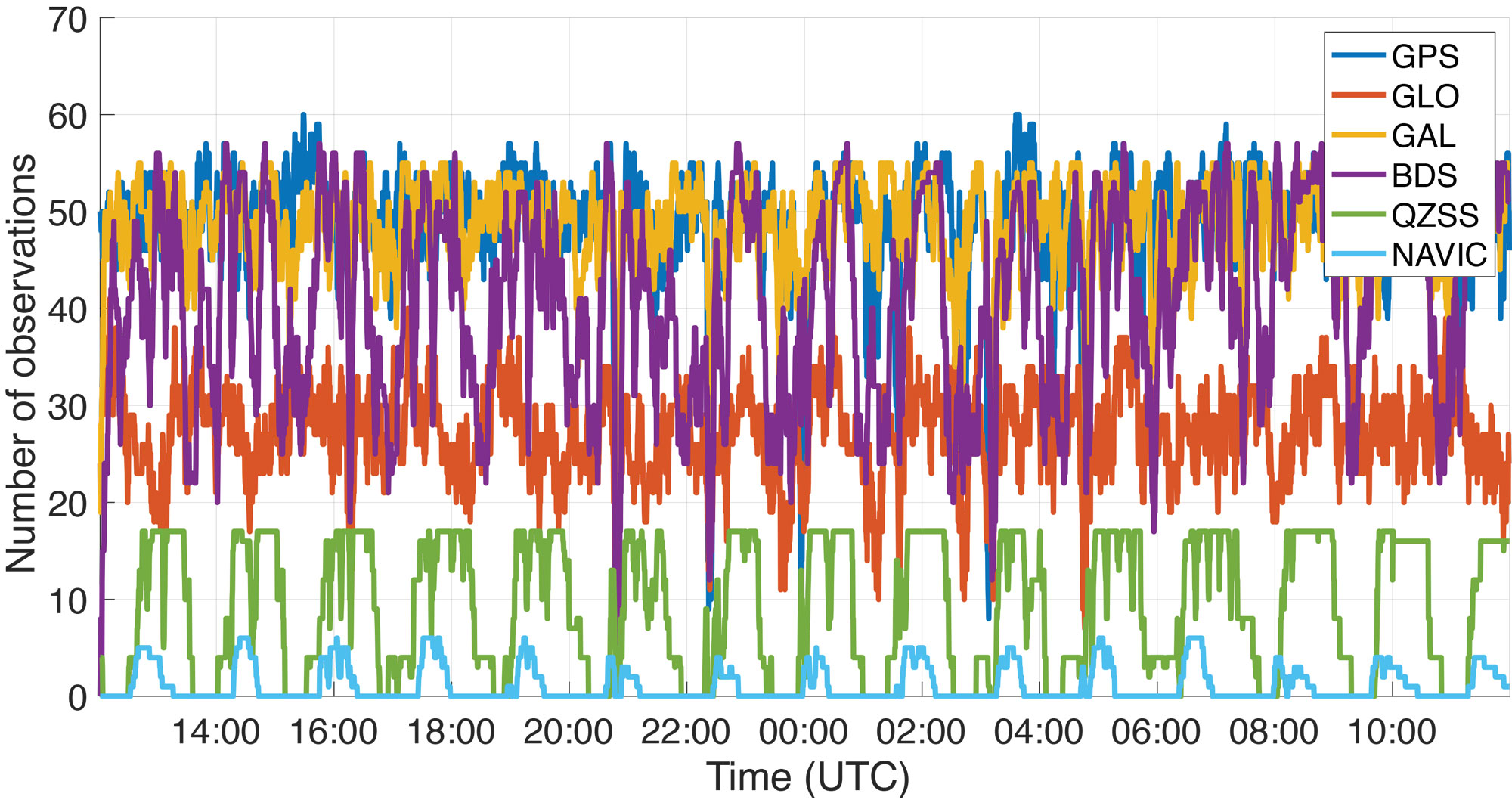
Figure 5: Number of observations recorded by Bobcat-1 from each GNSS constellation during a data collection started on February 27, 2022.
The goal of the mission is to estimate the XYTOs for all the GNSS constellations. However, in this article only the Galileo-to-GPS time offset (GGTO) is considered. The Galileo Performance Reports published by the European Union Agency for the Space Programme (EUSPA) provide information on the accuracy of the GGTO broadcast parameters, which are typically within approximately 3 nanoseconds of the true GGTO. Therefore, the broadcast GGTO provides a point of comparison and reference for Bobcat-1’s estimates.
A summary of the data collections considered in this work is provided in TABLE 1. These data collections are among the longest recorded by Bobcat-1. As an example, FIGURE 5 shows Bobcat-1’s data collection for February 27, 2022. It should be noticed that data collections were initiated from the control station at Ohio University when the CubeSat was in view, and each data collection would start only when the satellite’s battery voltage was above a defined threshold. The collection would stop safely if a minimum voltage threshold was reached. The data sets collected during the first months of the mission had durations limited to one to four hours, since the minimum battery voltage threshold was set conservatively. However, as the mission continued, data collections recorded in the last several months before deorbiting were configured with lower thresholds, enabling continuous data collections with durations of up to 24 hours. During the longer data collections, the sampling period was set to 20 seconds to reduce the total quantity of data stored and downlinked. The work described here focuses on a select few data collections that span a period of five months between September 28, 2021, and February 27, 2022.
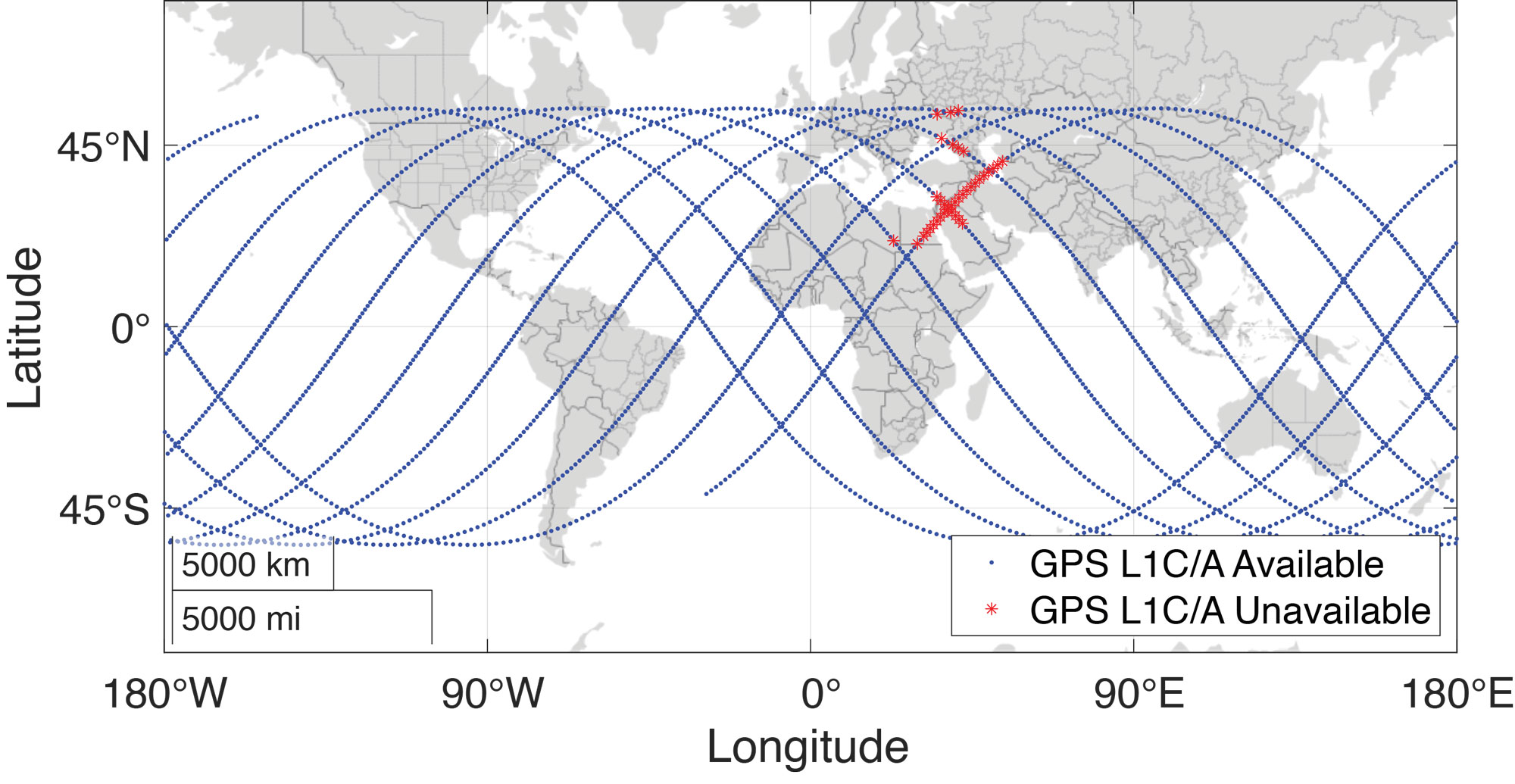
Figure 6: Bobcat-1’s ground track during a data collection for XYTOs estimation held in February 2022, approximately 24-hours long. Note that the blue dots correspond to the positions (latitude and longitude) of Bobcat-1. The red stars indicate that even if the position was calculated thanks to a multi-frequency and multi-GNSS solution, GPS L1 C/A measurements were not available. Analysis of the carrier-to-noise-density ratio measurements and comparison with the available spectrum measurements showed that in correspondence to those positions interference was present.
The data contain multi-frequency measurements from all systems, with an average of 180 observations made per sample. The maximum number of observations at once was 217. While multi-frequency measurements were collected from all constellations, this analysis only uses single-frequency measurements from two constellations: GPS L1 C/A and Galileo E1C.
RESULTS
There are two simple approaches to calculating inter-constellation time offsets: one involves computing multiple single-constellation user solutions, and the other involves a single multi-constellation user solution. Each approach has slightly different effects in terms of error propagation. In the first approach, the XYTOs can be calculated by taking the difference of the independently calculated receiver-to-system time offsets. This method requires at least four satellites from each constellation to be visible. In the second approach, all the receiver-to-system time offsets for all constellations involved in the solution are solved simultaneously. This reduces the number of measurements required per-constellation, with the minimum number of measurements needed being equal to the number of unknown state variables.
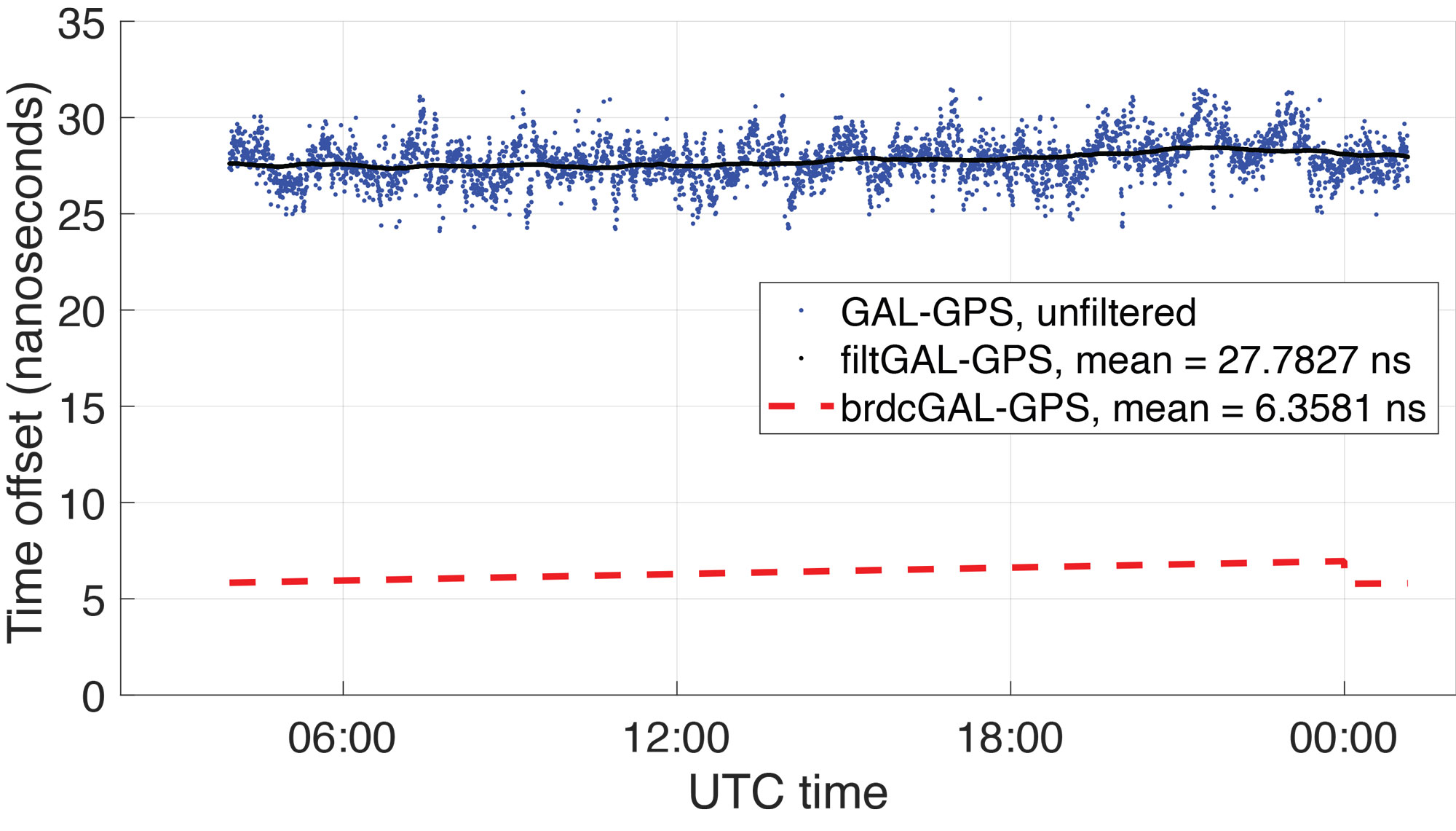
Figure 7: Broadcast GGTO (red) compared to Bobcat-1 Galileo-GPS time offset estimate, before calibration (blue) and filtered estimate (black). The results are related to data collection 181, started on December 27, 2021, which lasted about 16 hours (more than 10 orbits). The estimates’ variations, on the order of ±5 nanoseconds, are mainly due to temperature effects during the orbit and here are simply represented with a moving average.
In general, the latter method improves the XYTOs’ solution availability since the receiver-to-system time offsets for each system can be calculated with even fewer than four measurements from each system. For each sample point, the user solution was determined using this method, and the GGTO estimate was calculated by taking the difference of the receiver-to-GPS time offset and the receiver-to-Galileo time offset. This method allows the XYTO to be estimated by the receiver even when visibility is degraded. For example, as shown in FIGURE 6, Bobcat-1’s data collections are affected by interference, mostly on GPS L1, in some regions. Points where interference was believed to be present are marked by red stars on Bobcat-1’s ground track shown in the figure, specifically denoting points where the number of tracked GPS L1 C/A signals drops below four. For each sample point, the user solution was determined using the method discussed above, and the GGTO estimate was calculated by taking the difference of the receiver-to-GPS time offset and the receiver-to-Galileo time offset.
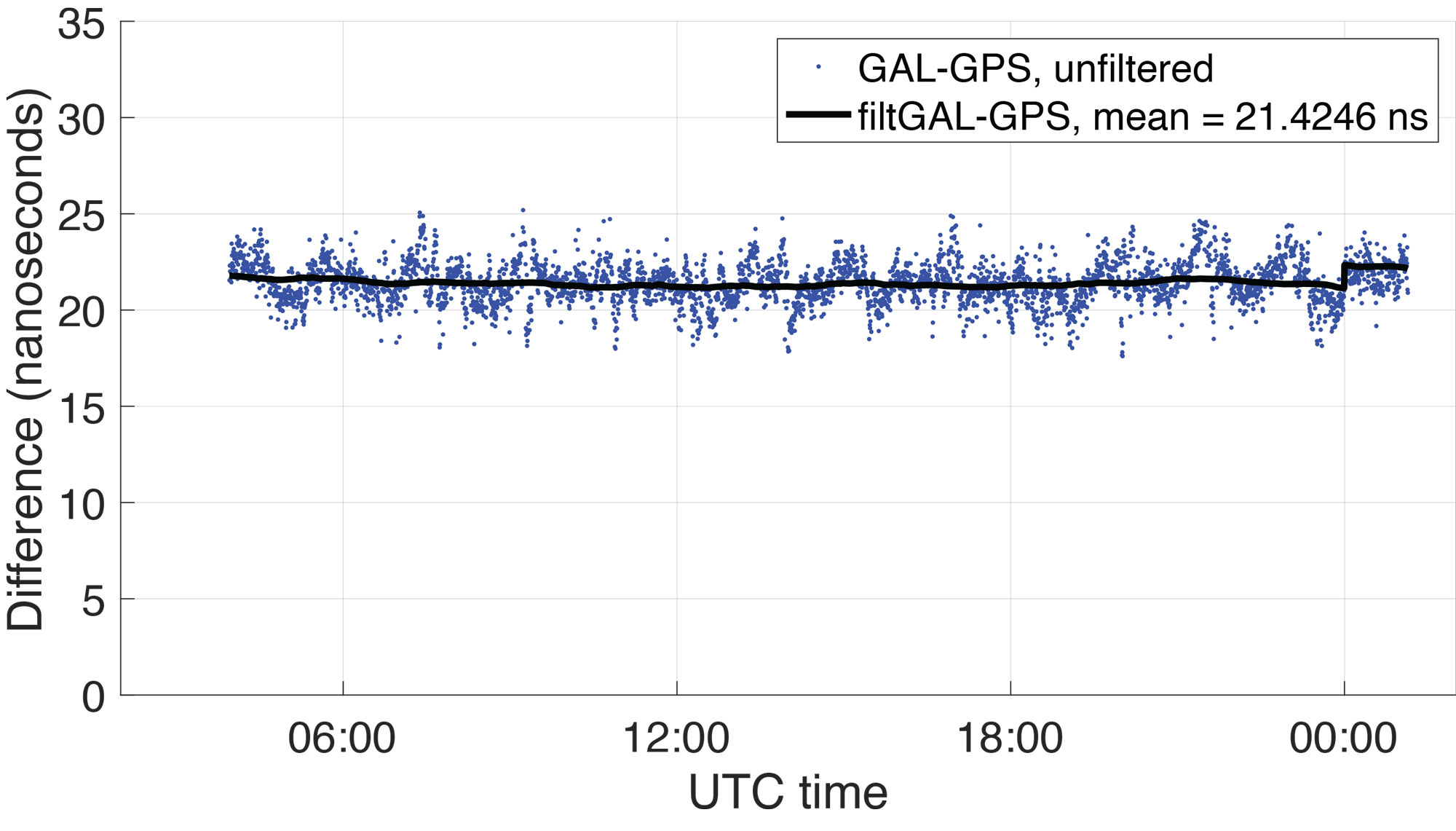
Figure 8: Difference between Bobcat-1 estimate and GGTO. The residual is mainly an estimate of the receiver inter-system bias that even pre-calibration shows to be stable in orbit as shown in Table 2.
FIGURE 7 shows (in blue) the GGTO estimate using Bobcat-1 measurements (data collection 181, started on December 27, 2021, and lasted about 10 orbits). The plotted values are the estimate of the system-to-system bias (GGTO) from which the receiver-specific ISB (Galileo-to-GPS) has not yet been removed. The oscillations visible in the unfiltered GGTO estimates are the result of temperature effects on the receiver. They can be mitigated by applying the calibrations made during pre-launch climate chamber testing, though for this analysis the estimates are simply filtered using a moving average (shown in black in the figure). Note that the abrupt change in the broadcast GGTO about 21 hours after the collection start corresponds to the start of a new day in UTC time, when a new estimate of the broadcast GGTO parameters was provided.
In FIGURE 8, the difference between the Bobcat-1 estimate of the GGTO and the broadcast GGTO is plotted (raw, in blue, and filtered with a moving average, in black). This is an estimate of the Bobcat-1 receiver’s Galileo-to-GPS ISB, which needs to be stable and repeatable in orbit, to enable accurate estimates of the true GGTO. As Figure 8 indicates, the receiver ISB shows stability even before calibration, showing periodical variations mainly due to temperature changes over the orbit.
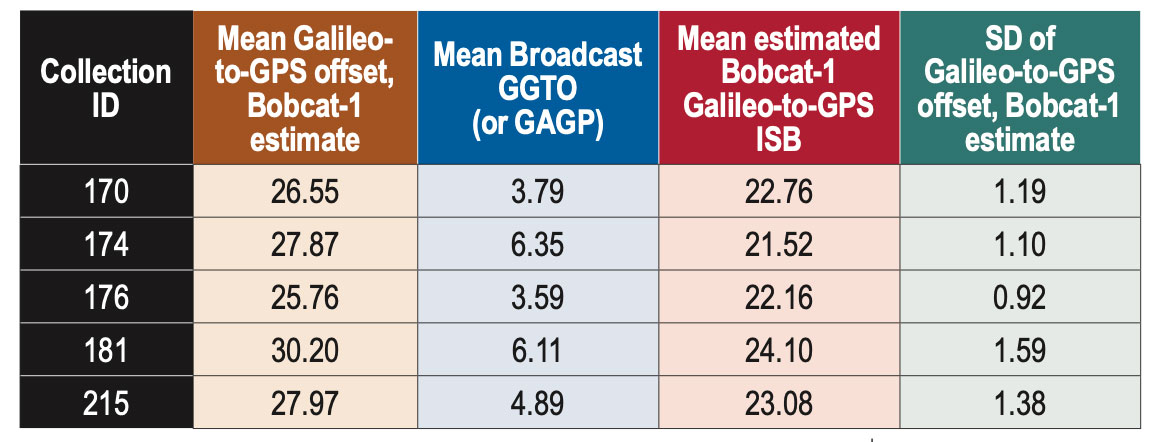
TABLE 2 summarizes some results over a five-month period. Only the longest data collections were considered, but the shorter ones are also under analysis to provide a longer and denser observation window. From the data in Table 2, the Bobcat-1 receiver’s mean Galileo-to-GPS ISB, estimated by comparison with the broadcast GGTO, shows a standard deviation, pre-calibration, of less than 1.5 nanoseconds over five months. Considering that the accuracy on the broadcast GGTO is expected to be ≤ 3 nanoseconds, this estimate of the receiver ISB shows that its stability over time may enable accurate XYTO monitoring from LEO.
Table 2: Bobcat-1 Galileo-to-GPS time offset vs broadcast GGTO, for different data collections over about five months. All figures in columns two through five are in nanoseconds.
The implementation of the receiver bias calibration, including the temperature effects, will refine this result. The final test will include assessing the performance of the calculated system XYTO, utilizing it in the solution of another receiver previously calibrated and at a known location.
CONCLUSIONS
Results of five 15+ hour data collections spanning a period of five months are compared. The difference between the broadcast GGTO and the GGTO estimate calculated using data from Bobcat-1 appears to be stable within 1.5 nanoseconds. Observing the in-orbit data and comparing it with the data collected previously in a controlled environment in the laboratory, a high correlation is observed between the bias change over time and the measured receiver temperature. The mitigation of this effect will enable stability of our receiver characteristic GGTO estimate to within 1 nanosecond. These experimental results suggest that a few multi-GNSS receivers in LEO could provide a method to monitor XYTOs in near real time, providing redundancy and diversity to the ground-network-based estimation system.
ACKNOWLEDGMENTS
The authors would like to acknowledge NASA’s Satellite Communication and Navigation Office (SCaN), NASA’s Glenn Research Center, NASA’s CubeSat Launch Initiative (CSLI), and Ohio University for funding the Bobcat-1 CubeSat mission. Additionally, we thank Kevin Croissant and Gregory Dahart, previous student members of the Bobcat-1 team, and Dr. Frank van Graas, Ohio University Professor Emeritus and former faculty member of the Bobcat-1 team.
This article is based on the paper “Receiver-specific GNSS Inter-system Bias in Low-Earth Orbit” presented at ION ITM 2023, the 2023 International Technical Meeting of the Institute of Navigation, Long Beach, California, January 23-26, 2023.
The Russian satellite navigation system is experiencing tough times as Western sanctions and Russia’s ever-growing international isolation seriously complicate its further development.
Prior to Feb. 24, 2022, when Russia invaded Ukraine, Russia’s navigation sector was developing well and had a healthy growth rate, which is reflected by the steady growth and improved performance of its satellite constellations. However, the start of Russia’s war with Ukraine and the consequent international sanctions regime against Russia has put an end to the hopes for further development of the sector and especially of its flagship GLONASS global navigation satellite system (GNSS).
As for GLONASS, as academician Nikolai Testoedov, general designer of JSC Information Satellite Systems Reshetnev, one of Russia’s leading satellite manufacturing companies, said during a general meeting of the Russian Academy of Sciences, the main problem is that Western sanctions do not allow Russia to bring its positioning accuracy to the desired 30 cm or at least 50 cm.
According to Testoedov, the main reasons for this are serious problems with the supplies of electronic components, most of which Russia traditionally imported. “Until 2014, when the first sanction restrictions were introduced, the share of imports in Russia’s entire satellite constellations reached 42%,” Testoedov said. “Currently we implement a strategy of import substitution in the sector, which is designed until 2030 and involves a transition to 100% domestic products. As of 2014, we had 6,000 electronic components of foreign origin. Since 2014, a lot of work has been done to combine various equipment. Now, it is used in Russia’s satellite constellations.”
It has already brought some results. According to Ivan Revnivyh, head of the GLONASS department of the Russian space corporation Roscosmos, thanks to the new satellites that have been launched in recent years, the accuracy of GLONASS civil signals has increased up to 1.32 meters. According to Revnivyh, Russia plans to continue work in this direction as part of its existing federal project “Maintenance, development and use of the GLONASS system,” which intends to increase the accuracy of the signals up to 0.3 m.
Russia plans to continue to improve GLONASS’s accuracy until it matches that of other GNSS and meets International Civil Aviation Organization (ICAO) requirements.
“When landing a civil aircraft at unequipped airfields,” Testoedov said, “the signal should arrive with a delay of no more than 6 seconds, with an accuracy of no worse than half a meter.”
Despite the sanctions, Russia plans to continue to develop GLONASS. As part of these plans, starting from 2025, it plans to launch modernized GLONASS-K2 satellites in an import-substituted and multifunctional version. Thanks to this, the signal will be 100 times more powerful than the standard one. That will be primarily achieved by using dedicated navigation satellites weighing about 1 ton.
After 2030, Russia also plans to place six satellites in geosynchronous orbits (about 36,000 km), which will increase the availability of the signal in Russian cities and difficult terrains.
There are also plans to create a constellation of 300 satellites in low-Earth-orbit (LEO) at an altitude of 500 to 100 km. They are expected to increase the strength Russian satellite signals by more than 1,000 times.
In recent years, Russia has faced restrictive policies implemented by various international bodies, including the International Bureau of Weights and Measures and the International Association of Geodesy. According to Russian experts, many of these bodies are currently taking discriminatory measures against Russian systems and technologies.
In this regard, Russia plans to propose to the countries members of BRICS — an intergovernmental organization comprising Brazil, Russia, India, China, South Africa, Egypt, Ethiopia, Iran and the United Arab Emirates — to design products and systems whose characteristics will be comparable to those of Western origin. According to Reshetnev Systems’ experts, however, this could improve results — mainly, accuracy — by only 20 percent, which would not be critical for Russia.
GLONASS, which first achieved a full constellation of 24 satellites in 1995, currently consists of 24 satellites of three types: GLONASS-M, which has been produced since 2003, GLONASS-K which has been produced since 2011, and two GLONASS-K2, which Russia launched in 2023. All the satellites are part of the Cospas-Sarsat system.
Despite the fact that the life expectancy for most Russian GLONASS satellites is seven to 10 years, many of them, according to Testoedov, are already more than twice as old. Russia plans to replace at least six GLONASS satellites within the next two to three years. In the first years of launching the constellation, Roscosmos usually launched nine satellites into orbit at once; currently, it is launching only one or two at a time.
Still, it is possible that these rates will increase significantly, as by 2030 Russia plans to increase its constellation of satellites by up to 1,000 satellites. For this purpose, the country plans to produce 200-250 satellites per year.
According to the head of Roscosmos, Yury Borisov, space industry enterprises should produce one satellite per day by 2030. According to him, the Russian Federation is ready to learn from the experience of other countries in this area, such as China.
In 1999, professors Jordi Puig-Suari at California Polytechnic State University and Bob Twiggs at Stanford University proposed a design for a miniaturized satellite that would allow students to more easily develop the skills necessary for the design, construction, testing and operation of satellites in low-Earth orbit (LEO). These nanosatellites would be built using standardized modules with a useful volume of 10 × 10 × 10 centimeters (hence the designation cube satellite or CubeSat) with a maximum mass of 2 kilograms. Apparently, the inspiration for the design came from the plastic box used to display “Beanie Babies,” a line of small stuffed toys. While a CubeSat can be constructed using one module or unit, termed a 1U design, modules can be stacked together to form sizes of 2U, 3U and so on.
Initially just a suggested form factor, the design was widely adopted by nanosatellite developers and in 2017 the International Organization for Standardization published the ISO 17770:2017 standard to formally define the physical, mechanical, electrical and operational requirements of CubeSats.
While some CubeSats have been launched as secondary payloads on launch vehicles, many have been released into space having been first launched to the International Space Station (ISS) in a cargo resupply vehicle. For example, Nanoracks developed a CubeSat deployer that can house multiple CubeSats. Once on the ISS, the deployer is positioned so that when its forward-facing door is opened, a spring at the back of the deployer pushes the CubeSats into space.
As of January 1, 2024, 2,323 CubeSats have been launched according to a nanosatellite database. Some of these satellites demonstrated new space technologies while others were science investigation missions to study Earth’s atmosphere or space weather or astronomical objects or other satellites. Many of these CubeSats, if not most, have been built by universities from around the world. In fact, various space agencies have programs to support the development and launch of CubeSats by students, such as NASA’s CubeSat Launch Initiative and the Canadian Space Agency’s Canadian CubeSat Project (CCP). As most CubeSats go into LEO, a lot of them have already deorbited. However, while in space, they provided a wealth of data of various kinds and many of the accumulated datasets are still being mined for new results. A nice example of such a dataset is that provided by Bobcat-1, a 3U CubeSat developed by Ohio University. Its mission, in addition to training students in aerospace technologies, was primarily to assess the feasibility of monitoring the time offsets between different GNSS, but also GNSS spectrum monitoring and testing a software-defined GNSS receiver. In this quarter’s “Innovation” column, authors from the Bobcat-1 team discuss some of their work on Galileo-to-GPS system time offsets. Go Bobcats!