Linx Technologies has released the MAG Series SMA and RP-SMA magnetic antenna bases, which are suitable for GPS, Galileo and QZSS applications. The antennas are designed to combine a strong magnetic mount with typical connectors to create different mounting options for a variety of whip/blade-style connectorized antennas.
“This versatile mounting option provides the capability to extend the placement of the antenna to a remote location and allows the flexibility for the antenna to be used in a mobile application, making it especially well-suited for the growing internet of things (IoT) market,” said Tolga Latif, senior director of product management for IoT and micro-markets.
The MAG Series antenna bases are IP67 rated (connectors, base and coax) and are also suitable for LTE-M (Cat-M1), NB-IoT, 5G/4G LTE/3G/2G, LoRaWAN, Sigfox, Wi-Fi, HaLow (802.11 ah), Bluetooth and Zigbee, as well as GNSS applications.
The MAG Series antenna bases are available now via Linx Technologies’ distributor and manufacturer representative networks.
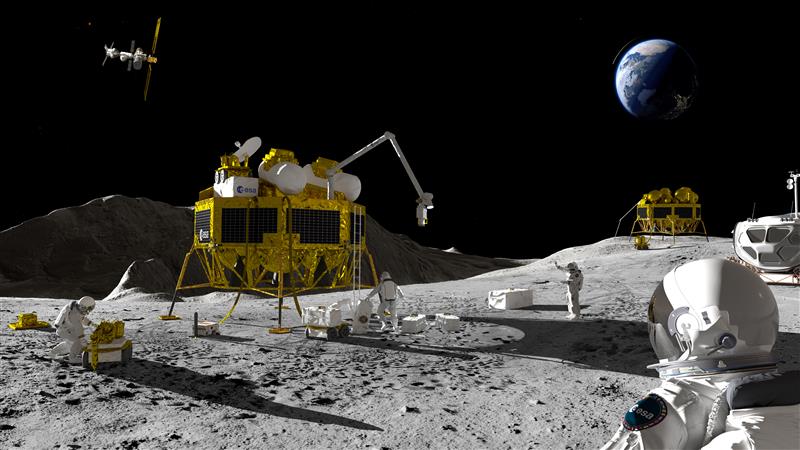
An artist’s impression of a Moon exploration scenario. (Image: ESA)
As there are several missions to the moon planned within the next decade, space agencies have started to consider how to keep time on the moon. To address time concerns, the LunaNet architecture, designed for lunar communications and navigation services, was introduced at the ESTEC technology center of the European Space Agency (ESA) in the Netherlands in November 2022.
“LunaNet is a framework of mutually agreed-upon standards, protocols and interface requirements allowing future lunar missions to work together, conceptually similar to what we did on Earth for joint use of GPS and Galileo,” said Javier Ventura-Trav
eset, ESA’s Moonlight navigation manager, coordinating ESA contributions to LunaNet. “Now, in the lunar context, we have the opportunity to agree on our interoperability approach from the very beginning, before the systems are actually implemented.”
“During this meeting at ESTEC, we agreed on the importance and urgency of defining a common lunar reference time, which is internationally accepted and towards which all lunar system and users may refer,” said Pietro Giordano, ESA navigation system engineer. “A joint international effort is now being launched towards achieving this.”
Each mission to the moon has operated on its own timescale from Earth. Deep space antennas have been used to keep onboard chronometers synchronized with terrestrial time at the same time to facilitate two-way communications. ESA stated that this way of working will not be sustainable in the coming lunar environment.
Time to think about time
Should a single organization be responsible for setting and maintaining lunar time? Also, should lunar time be set on an independent basis on the moon or kept synchronized with Earth? And what about time on other planets?
“Of course, the agreed time system will also have to be practical for astronauts,” said Bernhard Hufenbach, a member of the Moonlight Management Team from ESA’s Directorate of Human and Robotic Exploration. “This will be quite a challenge on a planetary surface where in the equatorial region each day is 29.5 Earth days long, including freezing fortnight-long lunar nights, with the whole of Earth just a small blue circle in the dark sky. However, having established a working time system for the moon, we can go on to do the same for other planetary destinations.”
To efficiently collaborate, the international community will have to settle on a common “selenocentric reference frame,” similar to the role played on Earth by the International Terrestrial Reference Frame, allowing the consistent measurement of precise distances between points across the planet.
Pasternack has released a series of GNSS antennas that meet military specifications for use in several small form factor and mobile applications.
The mil-spec GNSS antennas are engineered for environmental performance according to the MIL-STD-810G standard and include multi-standard GPS L1, Galileo E1 and GLONASS options.
The MIL-STD-810G GNSS antennas are IP67 rated. They are available in passive and active versions and provide coverage from 1,597 MHz to 1,607 MHz. The GNSS antennas feature linear polarization for cross-polarized isolation, nominal gain options of -3 dBic and 10 dBic, and SMA mounts.
The European Space Agency (ESA), in collaboration with the Joint Research Centre of the European Commission, are hosting this year’s ESA/JRC International Summer School on GNSS with the Swedish Space Agency in July in Kiruna, Sweden. The course will include an overview of satellite navigation from the theoretical basis of GNSS, their signals, and processing by receivers and more.
Elements of this year’s program will include details of low-Earth-orbit positioning, navigation and timing, navigation on the Moon, and Galileo’s Open Service Navigation Message Authentication. Exercises will include receiving signals from Galileo and other GNSS.
Participants will also learn about business aspects, intellectual property rights, and the future of satellite navigation systems, including Galileo second-generation.
Some of the world’s leading satnav and space experts will be giving lectures. Lecturers include Paul Verhoef, former director of navigation for ESA, and Jean-Jacques Dordain, former director general. The course will be opened by Anna Rathsman, Director General of the Swedish National Space Agency; Javier Benedicto, Director of Navigation at the European Space Agency; and Georgios Giannopoulos, head of the Technologies for Space, Security and Connectivity Unit at the Joint Research Centre of the European Commission.
The course is limited to 50 participants on a first-come, first-served basis and is open to graduate students, Ph.D. and postdoctoral researchers, as well as young engineers and academics working within industry or agencies, aged 38 or younger.
The summer school will take place July 17-28 in Kiruna, Sweden. Register before April 14 for a reduced early fee. For more information and to register, click here.
Space Systems Command (SSC) has declared GPS III Space Vehicle 10 (SV10) available for launch, marking completion of constellation modernization efforts and production for the GPS III program.
“The completion of the tenth, and final, GPS III space vehicle is a significant milestone for GPS modernization,” said Scott Thomas, GPS III program manager for the GPS Space Vehicles Acquisition Delta within SSC’s Military Communications and PNT directorate. “This would not have been possible without the collaboration, communication, and accountability of our industry and government partners. The GPS III program contributions underpin U.S. national security needs for our warfighters and for more than four billion GPS users worldwide.”
GPS III satellites deliver enhanced performance and accuracy through a variety of improvements, including increased signal protection with improved accuracy. GPS III also delivers a new L1C signal designed for interoperability with similar GNSS, and expands the civilian L5 signal, dubbed safety-of-life, which is not yet operational.
GPS III SV06 was launched on a SpaceX Falcon 9 Block 5 vehicle on Jan. 18, and Operational Acceptance was declared on Jan. 31. GPS III SV07, SV08, SV09 and SV10 are awaiting launch at Lockheed Martin’s GPS III processing facility in Waterton, Colorado.
GPS III Space Vehicle 06 (SV06) reached Operational Acceptance on Jan. 31 according to the Space Systems Command (SSC) of the United States Space Force. SV06 was launched on a SpaceX Falcon 9 Block 5 vehicle on Jan. 18.
SSC also transferred Satellite Control Authority (SCA) of SV06 to the 2nd Space Operations Squadron at Schriever Space Force Base, Colorado. GPS III SV06 joins the GPS PNT constellation of 31 operational satellites.
This is the first time SCA and Operational Acceptance has occurred on the same day enabling faster delivery for users. SSC’s Military and Communication positioning, navigation and timing (PNT) enterprise collaborated with the U.S. government acquisition team, industry and space operators on the achievement.
“The Operational Acceptance of GPS III SV06 further contributes to SSC’s ongoing modernization efforts, as it brings our overall suite of capabilities ever closer to our target dates for deployment to the warfighter,” said Col. Heather J. Anderson, transition director within SSC’s PNT directorate. “GPS III SV06 will be set healthy to all global users in February 2023.”
The first-stage booster used in the SV06 launch previously sent the NASA Crew-5 mission to the International Space Station on Oct. 5, 2022.
Douglas County Public Works needed a GNSS rover to support its UAS operations. The pay-as-you-go option was appealing as they only needed high-precision a few times per month. (Image: Jason Schilling)
High precision GNSS rovers play a vital role in a broad variety of field surveying and mapping applications. Different users have different value propositions in mind when choosing field hardware and software: expected precision, sources of corrections, configurations for specific workflows, and, of course, cost. Weighing these many considerations, GNSS manufacturers have come up with portfolios of multiple models to fill these varied needs.
That said, GNSS manufacturer Bad Elf took a different approach when it designed its flagship rover, the Bad Elf Flex. The Flex is designed to meet the cost-precision-workflow needs of everyone, from asset mappers to surveyors. (Hence the name “Flex.”) To inform the design of the Flex, Bad Elf listened to field users who wished for a scalable solution in a single rover, rather than having to buy multiple different models, and without breaking the bank.
Options for the Infrequent User
“I had one of the little Bad Elf GNSS surveyor handhelds for many years,” said Jason Schilling, wildlife biologist with Douglas County Public Utility District in central Washington State. “That worked great for rough mapping, between a foot and a meter of precision, and I could connect it via Bluetooth to mapping software on my mobile.”
But this all changed when Schilling began an unmanned aerial system (UAS) program for the utility several years ago.
“I really needed survey-level precision for ground control points to geolocate the images from the UAS,” said Schilling.
He was aware of the high cost of centimeter-precision-capable surveying rovers and it was too big of an investment, considering that he only did UAS mapping a few times a month. As an existing Bad Elf customer on the company mailing list, Schilling learned about the new Flex rover, which offered multiple options, and he found one that seemed quite enticing for the needs of his utility.
Schilling purchased a Flex Standard bundle at a low base price, about $3,000, with the pay-as-you-go plan for high precision. In the standard configuration, the Flex is capable of autonomous positioning (1–5 m), and mapping grade (sub-meter precisions) via free satellite-based augmentation services (SBAS), such as WAAS. But when the user activates a pre-purchased “token,” the full centimeter-precision capability, using external corrections, is enabled.
“On the day of a UAS survey, we turn it on, activate a token from our account, and then we have 24 hours of high precision,” Schilling said. “It costs us $25 per day.”
For two to three UAS surveys a month, this works out to far less over many years than the cost of buying a typical surveying rover.
Correction Sources
For real-time kinematic (RTK) corrections, Schilling connects via NTRIP to the statewide cooperative real-time network (RTN); sometimes in a network RTK mode (such as VRS) or single-base RTK to a nearby reference station on the same network. The Flex accommodates NTRIP connections to RTN or IP-enabled reference stations, but Bad Elf has added even more flexibility for corrections.
In some scenarios there is no access to an RTN or no cell service (needed for NTRIP access). One option in these cases is to add a second Flex, set it up as an RTK base, and connect the base and rover via radios that Bad Elf offers.
Bad Elf has added other options for corrections: the Bad Elf RTK service taps into a nationwide real-time network operated by Point One Navigation. This is accessible via NTRIP in the same manner as regional, state or local RTN, and is offered for a monthly fee. In addition, for situations where there is no RTN or cell service, a global precise point positioning (PPP) service (Atlas) can be enabled on the Flex.
PPP differs from RTK/RTN in that it does not need the dense arrays of reference stations, or cell service to access. Instead, PPP derives very precise clock and orbit data from a global array of tracking stations and delivers this to the Flex via geostationary satellites. After a short convergence time, PPP from the Atlas service will yield 5 –10 cm precision over most of the globe.
The Full Boat
Full Configuration. Brian Cortese works for the City of Ellensburg, where he uses the FLEX Extreme Bundle for multiple field applications. (Image: Brian Cortese)
The City of Ellensburg, a college town and farming community in central Washington State, chose the Flex Extreme bundle for about $6,000 — the “full boat” configuration. The Extreme bundle enables all the add-on services all the time, eliminating the need for tokens. In their case, the frequency of use made the higher initial investment worthwhile.
“We have big plans for our rovers,” said Brian Cortese, Engineering Tech/Inspector for the City of Ellensburg Public Works & Utilities.
Ellensburg is a vibrant town that is attracting a lot of new development and it is being proactive in surveying and mapping assets as they are added or replaced.
“We’re recording manholes and valves, sewer systems, storm water systems, irrigation, hydrants — everything that gets built in the city gets as-built surveyed,” Cortese said. “Precise, real-time positioning, it’s been a benefit to us already. We can go out before they work on the subgrade for new developments and take measurements, and then when they finish the subgrade and pave it, we can go back and locate those exact positions.”
Ellensburg uses corrections from the statewide cooperative RTN. In fact, one of the RTN reference stations —also part of the NOAA National CORS Network — is right in the center of town atop the science building of Central Washington University. While the city does a wide variety of surveying and mapping, with the Flex and RTN corrections surveyors get the same centimeter-precision for everything they measure in the field.
“We’ve done design projects with it,” Cortese said. “For instance, we recently took measurements in an area of downtown for a proposal by recording positions and elevations to develop a new park and entertainment area for the community. We are also marking Americans with Disabilities Act (ADA) ramps to meet federal specs out in the field — it’s been really handy for so many things.”
Survey-Grade Rover
To serve the full range of precision needs, the Flex had to be designed as a survey-grade rover. It has a full-constellation GNSS and RTK engine: GPS, GLONASS, Galileo, BeiDou, and support for other regional constellations. With more satellites in view, it can perform in sky-view-challenged locations, such as around buildings and under tree canopy.
“Ellensburg is on the Tree City, USA list; our streets are very well lined with a variety of trees, which is also where a lot of our utilities are and development is going on,” Cortese said. “We have been able to get good precisions in and around those trees. Actually, someone on our staff is taking an inventory of the trees with the Flex and loading the data directly into ArcGIS.”
Even in the more rural areas of Grant County that enjoy a lot of open sky, Schilling said, some areas planned for mapping are along upper tributaries and in the hills with a lot of tree coverage. He said the Flex has performed well in those areas.
Choices
The Flex offers these options and combinations:
Flex Extreme. Full survey-grade rover that can use a variety of correction types.
Base-Rover RTK. Two Flex Extreme units connected via radio.
External RTN/RTK corrections via NTRIP.
Bad Elf RTK Service. Single-tap access to a nationwide RTK corrections service.
PPP service. Atlas PPP corrections via L-band geostationary satellites.
Flex Standard. Pay-as-you-go high-precision-enabled service using tokens.
Static Logging. Observation file logging for post-processing (supported by Flex Extreme).
Compatibility with multiple field-mapping software applications.
While many modern GNSS rover systems support one or more options similar to those listed above, Bad Elf’s Flex supports all of them, making it capable of a wide variety of applications.
The European Union Space Programme Agency (EUSPA) has signed a framework contract entrusting France’s space agency with providing Galileo search-and-rescue (SAR) services. The 137 million euro 10-year contract includes maintaining assets in operational condition, coordinating with the host sites and interfacing with the Cospas-Sarsat community.
Image: EUSPA
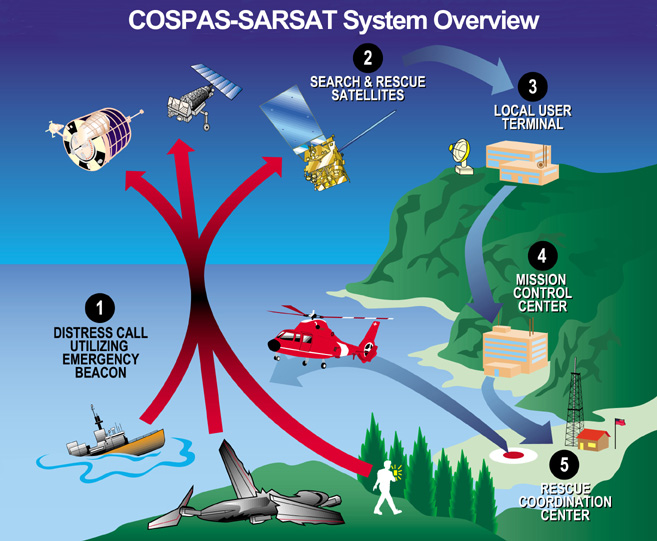
The National Centre for Space Studies (CNES) has been responsible for operations of SAR-Galileo services for the European Union since 2016, providing the SAR-Galileo Forward Link Service and the Return Link Service. The coordination of operations and maintenance of the ground segment, deployed across Europe, is headquartered at the space center in Toulouse, France.
A network of reference beacons enables evaluation of the performance of the systems in real-time. CNES also provides its expertise to EUSPA for the definition of international standards, performance monitoring and future developments.
Emergency position-indicating radio beacon-based services is an addition to the framework contract. CNES has already been identified as the future operator of the Emergency Warning Service, an alert service for European communities scheduled to begin operations in 2024.
Nearly 50 years ago, in December 1973, the Defense Systems Acquisition Review Council approved the Navstar Global Positioning System for entry into Phase I of development. Since then, through its development, deployment and continuing modernization, GPS has grown into a complex program. It is operated by the Department of Defense based on legislation from Congress, executive orders from the White House, and policies established jointly with the Department of Transportation. It supports U.S. military missions as well as myriad scientific, commercial and consumer applications around the planet. Of course, the last category, with its billions of users, now dwarfs all the other ones combined.
The GPS program, with an annual budget of nearly $2 billion and no user fees, is a gift from U.S. taxpayers to the world. It has staff in Washington, D.C.; at the Pentagon in Arlington, Virginia; at Schriever Space Force Base, Colorado; at the Space Systems Command at Los Angeles Air Force Base, California; at Cape Canaveral, Florida; at the U.S. Coast Guard Navigation Center in Alexandria, Virginia; and at GPS ground antennas in additional locations around the world. From the White House to Congress to aerospace companies, from military officers to civilian civil servants, from policy makers to engineers, from the East Coast to the West Coast to remote islands in the Pacific, Indian and Atlantic Oceans, GPS is a vast enterprise — most of which is little known even to people in the industry and virtually unknown to the public.
The Global Positioning System is a vast and mostly unknown enterprise. This section — the first in an occasional series of authoritative reference pieces in this magazine — aims to clarify who does what to maintain GPS as a fantastic global utility. The relevant missions of agencies or units are in italics.
After I researched and drafted the piece, I asked the experts listed below to review it and provide corrections and additions. While grateful for their substantial feedback, I take sole responsibility for any remaining errors or omissions.
Thank you to the following experts:
Harold W. Martin III, Director, Space-Based Positioning, Navigation & Timing, National Coordination Office
Michael J. Dunn, Capability Area Integrator for PNT, Space Systems Command, United States Space Force
Lt. Col. Robert O. Wray, Commander, 2nd Space Operations Squadron, United States Space Force
Scott R. Calhoun, Commanding Officer, Navigation Center, United States Coast Guard
Paul Benshoof, Technical Director, 746th Test Squadron (AFMC), Central Inertial and GPS Test Facility
Bernard Gruber, Senior Director, Northrop Grumman
Please return to this page periodically to read corrections and updates to this special section. If you spot any significant inaccuracies or omissions, please bring them to my attention by writing to me at [email protected].
GEODNET has released a real-time kinematic (RTK), centimeter-precision, GNSS corrections service designed for OEMs and system integrators of agricultural robotics. GEODNET is compatible with several GNSS receivers from major brands, on-vehicle automated steering, spraying kits, and most UAVs and robots.
The GEODNET corrections service has more than 1,700 total full-constellation reference stations worldwide and supports GPS, Galileo, GLONASS and BDS signals. It also has the RTCM 3.2 data format for maximum rover/receiver compatibility and NTRIP sign-on and access.
Additional local reference stations can be added.
Free GEODNET correction service trials are available now for qualified OEMs and system integrators in most agricultural regions globally. Interested parties can apply for a trial stream here.
One Galileo satellite has been reconfigured to emit a new signal component optimized to serve low-end receiver devices and internet of things (IoT) applications. According to the European Space Agency (ESA), GSAT0202, in elliptical orbit, was reconfigured in January to transmit the new signal, also known as the G1 E5 Quasi Pilot.
The G1 E5 Quasi Pilot in the E5 band lies along a narrow part of the overall Galileo signal, intended to enable streamlined positioning fixes requiring less calculation — without affecting the E1 and E6 signal bands, on which Galileo also transmits. The initial receiver test showed that the signal component has the potential to reduce the signal acquisition time by a factor of three compared to the current GPS L5 or Galileo E5a signals.
Image: ESA
Once GSAT0202 was reconfigured, signal measurements were collected using the high-gain antenna installations from the Galileo in-orbit test facility, which confirmed the stability of the augmented signal. After G1 E5 Quasi Pilot was broadcast, it was successfully acquired and tracked by a set of receivers.
Airbus Defense and Space, Thales Alenia Space Italy, the European Union Agency for the Space Programme (EUSPA), the European Commission, and Spaceopal supported this test.
The other elliptical Galileo satellite, GSAT0201, will also be reconfigured after further testing. Selected chipset manufacturers will be involved in the testing under supervision of EUSPA. The test results will be evaluated at the Galileo Programme level, to eventually introduce G1 E5 Quasi Pilot into the constellation.
An official evaluation of Advanced RAIM (ARAIM), a GPS technique used in aviation receivers for safer landings and take-offs, is being conducted by the William J. Hughes Technical Center (WJHTC) of the U.S. Federal Aviation Administration (FAA).
The WAAS Test Team at the technical center has begun to monitor the Integrity Support Data (ISD) parameters of ARAIM using evaluation tools and methods developed by both the center and Stanford University. Results of this monitoring will be published in a quarterly report on the WAAS Test Team website.
The Need for Advanced RAIM
ARAIM addresses various weaknesses of Receiver Autonomous Integrity Monitoring (RAIM).
To assure the integrity of GPS, aviation receivers implement RAIM, which detects any GPS satellite fault, and can then isolate and remove it from the navigation solution.
However, RAIM provides integrity only for horizontal operations, such as enroute and non-precision approach. Additional integrity is needed to allow advanced capabilities, such as vertically guided approaches. Other integrity systems, including the Wide Area Augmentation System (WAAS), provide the integrity needed to permit these additional operations.
Since RAIM’s debut, GPS and other GNSS have evolved to improve their performance and upgraded to add an additional civilian signal, making possible ARAIM architecture.
ARAIM increases the geometric diversity and integrity availability by using two core GNSS constellations (such as GPS and Galileo). ARAIM takes advantage of the second civilian signal by specifying dual-frequency processing so that the ionospheric error from GNSS signals is directly measured by the user equipment.
The ionosphere — in most cases, the largest source of error in a GNSS signal — can also reduce the integrity of GNSS signals. Data provided for ARAIM use can include improved performance commitments from the GNSS constellation. RAIM uses static values for those performance commitments.
Enabling LPV-200 Approaches
The dual-frequency multi-constellation ARAIM seeks to allow LPV-200 approaches worldwide. LPV-200 (localizer performance with vertical guidance) delivers accurate information on an aircraft’s approach to a runway with the use of GNSS positioning technology. The result is lateral and angular vertical guidance without the need for visual contact with the ground until an aircraft is 200 feet above the runway.
ARAIM is considered an aircraft-based augmentation system: the algorithm to determine GPS integrity is in the aircraft receiver, just like RAIM. ARAIM could use both GPS and Galileo to achieve the worldwide LPV-200 service goal, with the integrity needed available from satellites of both constellations.
Integrity Support Data. An important aspect of ARAIM is the integrity support message, which contains the ISD that describe a GNSS constellation’s accuracy and reliability. Each GNSS constellation service provider generates and updates its ISD data, while the receiver manages and uses each GNSS constellation message.
The specific ISD parameters for ARAIM have not yet been finalized, but candidate data includes the probabilities of satellite and constellation failure (for instance, more than two satellites fail due to a common cause), user range error, user range accuracy data, and other candidate data.
The ISD will be finalized when the International Civil Aviation Organization (ICAO) Standards and Recommended Practices (SARPs) with the ARAIM requirements are completed.
To ensure that the data provided in the ISM remains valid, external monitoring is needed. The external monitoring ensures the satellite and constellation failure probabilities provided in the ISM continue to be valid. External monitoring also characterizes the user range accuracy and user range error in the ISM.