While on public roads self-driving cars are still years away, autonomous systems are already common in much less congested and/or much more controlled environments — such as farm fields, ports, mines, rivers, and in the air — where the risk of a collision causing injuries or fatalities is smaller by orders of magnitude. From unmanned aerial vehicles (UAVs) taking aerial photographs, to unmanned ground vehicles (UGVs) spraying vineyards, to unmanned surface vessels (USV) conducting hydrographic surveys, autonomous or semi-autonomous systems are generally much safer, more efficient, and cheaper to operate than their manned counterparts.
Whether they have wheels, hulls, or wings to properly perform their tasks, autonomous systems need to know — with great accuracy — their position, heading and attitude (roll, pitch, yaw, surge, sway, and heave). For example, to spray grapes in a vineyard, an autonomous system needs to know not only its exact position but also whether it is level or tilted to one side due to uneven terrain, lest it spray the ground or into the air instead of the grapes. Similarly, a survey vessel’s pitch, which depends on its speed through the water, and its roll, due to waves and wind, affect the direction of its sonar beams.
Knowing a platform’s position, heading and attitude requires tight integration of the outputs of GNSS receivers and inertial navigation systems (INS). This enables autonomous systems to compensate for their movements — either physically and in real time, by orienting their sensors or tools, or in software when post-processing the data they collected.
The following three case studies sample current developments in autonomous systems on land, in the air, and on the water.
L’avion jaune, a French UAV and aerial photogrammetry company, uses the Trimble Applanix APX-20 UAV GNSS-inertial OEM solution and a YellowScan VX-20 lidar on its M600 multirotor UAV. (Image: L’Avion Jaune)
The breakdown of limestone cliffs generates landslides and loose debris that threatens the environment, people and wildlife below. These conditions make it impossible to safely operate traditional survey equipment from the ground for landslide detection. Using UAVs for direct georeferencing is an efficient way to take traditional survey efforts to the sky and enables users to accurately assess land formations while mitigating risk.
One way to implement direct georeferencing on UAV platforms is with the Trimble APX-20 UAV, which is a GNSS-inertial OEM solution that increases the mapping efficiency of small UAVs. It consists of small, low power, precision GNSS and inertial hardware components and POSPac UAV post-mission differential GNSS-inertial office software. The APX-20 UAV eliminates the need for ground control points and reduces the sidelap required to be flown per flight.
The APX-20 UAV contains a precision, survey-grade GNSS receiver and dual inertial measurement units (IMU), so it automatically supports integration on gimballed platforms without requiring an external interface to an autopilot or on a mount. It computes at 100 hz using the embedded IMU while simultaneously logging the raw IMU data from both the internal and external IMU at 200 hz for post-processing in POSPac UAV. The postprocessed position and orientation solutions are suitable for direct georeferencing of cameras, lidars and other sensors.
Trimble Applanix UAV Put to the Test
For fast and safe landslide detection, the Trimble Applanix APX-20 UAV for direct georeferencing was put to the test using a Multirotor M600 manufactured by French company L’Avion Jaune equipped with a VX-20 lidar sensor made by YellowScan, also a French company. This combination produces cost-effective and reliable high-resolution UAV lidar-derived DTMs and 3D models for hazard mitigation and planning.
L’Avion Jaune has performed more than 600 successful mapping missions globally. After pursuing mapping activities with mainly crewed aircraft, it began developing UAVs for long-distance applications for marine, tropical forest and polar regions such as the Multirotor M600/YellowScan VX-20, which offers high-precision, cost-effective and efficient aerial mapping.
The APX-20 UAV and the M600/YellowScan VX-20 were combined and deployed to evaluate landslide activities in France. The mission parameters for this configuration included: high point density; x, y, z precision of 5 cm; access to dangerous zones; map generation under dense vegetation area, and fast deployment. The goal of this project was to enable the implementation of safety and prevention plans for the protection of pedestrians, infrastructure, wildlife and more.
During the six-hour duration of the project, the APX-20 UAV and M600/YellowScan VX-20 configuration was flown four times for 15 minutes each during sunrise. It flew more than 75 ha in surface area with a flight speed of 5 m/s at 60 m in the air, following the topography. Checkpoints were surveyed with differential GPS following the conclusion of the flights. Data processing included computation of the georeferenced trajectory, matching flight lines and point cloud classification, which took two days.
The Results
The flexible UAV deployment of resources enabled the acquisition of dense point clouds and the generation of DTM in less than three days. During this project L’Avion Jaune was able to optimize the choice of material and discover the best practices to collect and process lidar data for mapping in dense vegetation.
The Resilient Missile Warning, Missile Tracking, and Missile Defense Acquisition Delta of the U.S. Space Force’s Space Systems Command (SSC) has released a request for information (RFI) seeking industry inputs for the next Epoch of medium-Earth-orbit missile warning and tracking (MW/MT) satellites. Responses from industry are requested by no later than May 16.
A continuation of the Missile Track Custody (MTC) Program, Epoch 2 is the second increment of capability-based, phased deliveries that leverage a mature foundation of space system technology — which allows for the insertion of new technology. Resilient MW/MT Epoch 2 satellites and associated ground systems will provide next-generation overhead persistent infrared solutions to defeat advanced missile threats.
The RFI solicits feedback from industry on the Epoch 2 acquisition strategy and technical approach for a multi-plane space segment, integrated ground segment and constellation-level systems operations.
Epoch 2 will emphasize the maturation of MW/MT sensors, optical cross-links, data fusion, constellation mission management and robust ground communications.
For more information on receiving the full Epoch 2 RFI can be found on the SAM.gov website linked here.
The European Space Agency (ESA) Academy is requesting university students to apply for the pilot edition of the Navigation Training Course. The course will take place June 26-30 at ESA Academy’s Training and Learning Facility in ESEC-Galaxia, Belgium.
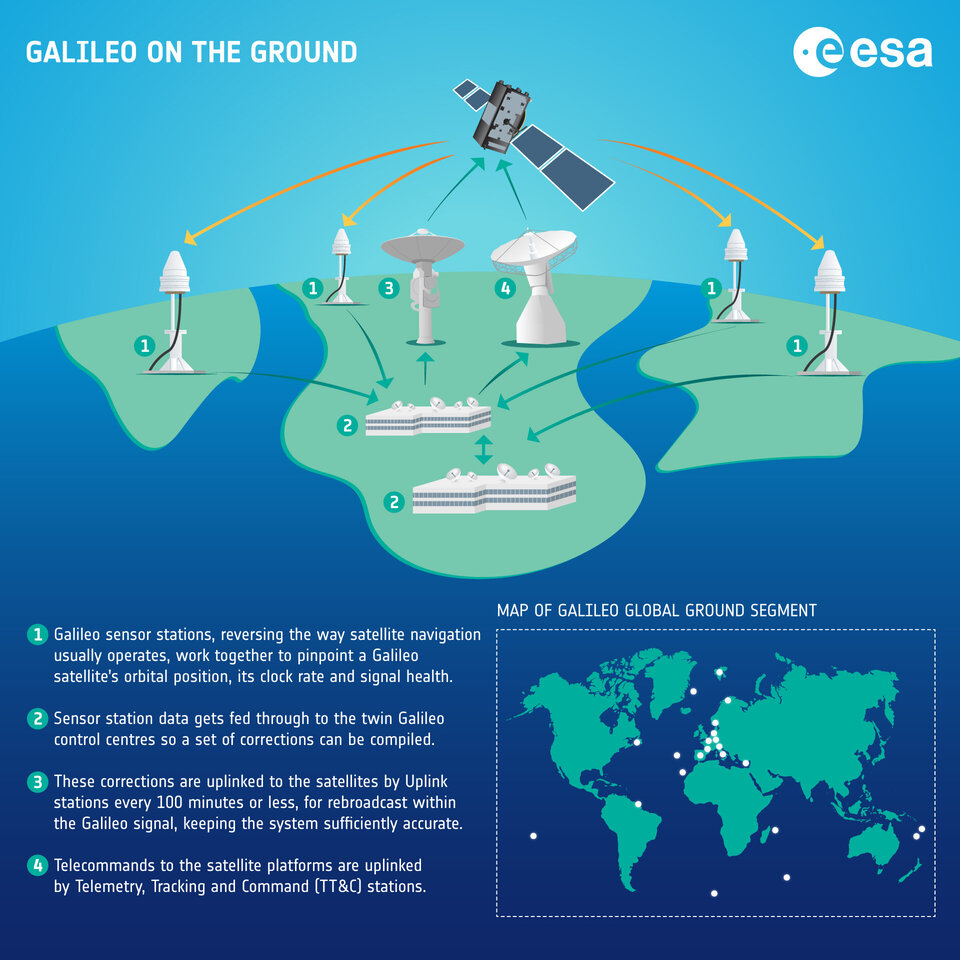
With a specific focus on Galileo, the ESA Academy course aims to provide university students with an introduction to satellite navigation. Designed by ESA experts that developed the Galileo space and ground segment, this training course will offer students fundamental knowledge of Galileo’s architecture, tools, services and functionalities.
The training course will include lectures and hands-on exercises with a tour of Galileo in-orbit test facilities in ESEC, which provides an essential part of the current Galileo ground segment.
Upon completion of the training course, students will be evaluated and will receive a certificate of participation and course transcript, allowing them to request ECTS credits from their respective universities.
For more information and application requirements, visit the ESA website.
Orolia, a Safran Electronics and Defense company, announced its Skydel GNSS simulation engine will support Galileo Open Service Navigation Message Authentication (OSNMA) simulation in the form of two-phased and separate solutions. These solutions will be available to users who have purchased simulation access to the Galileo constellation, which will be available in the next few months.
OSNMA is an emerging authentication service that allows GNSS receivers to verify the authenticity of received data to protect against potential jamming or spoofing attacks that can result in service disruptions, denial incidents and more.
The first solution is well-suited for most receiver integrators that want to test the OSNMA capability of a GNSS receiver with the official test vectors from the European Union Agency for the Space Programme (EUSPA). This solution will support the available official test vectors sample data, which supports the verification of OSNMA functionality implementation.
The second option will provide full flexibility in the configuration of the scenario as well as the OSNMA authentication parameters. It will be suitable for advanced users that test receivers in a wide range of edge and corner cases.
Available later in 2023, this phase will include the following elements in Skydel: authentication of the Galileo E1 OS navigation message, a new Skydel engine supporting OSNMA SIS ICD 1.0, support for the timed efficient stream loss-tolerant authentication protocol, and useful crypto material for running user-programmable simulation test scenarios.
This feature will be ready for future software updates in accordance with the next phases recommended by EUPSA.
Thales Alenia Space, along with Viettel and MKE, have been selected by Vinamarine to provide Vietnam with a MEOLUT Next ground station. MEOLUT Next will operate as a part of the COSPAS-SARSAT global medium orbit search-and-rescue (SAR) network.
The SAR solution will enable the detection and location of distress signals from COSPAS-SARSAT beacons on land, in the air, and at sea over a radius of 2,500 km around Haiphong, Vietnam, mainly using signals from Galileo.
Thales Alenia Space’s MEOLUT Next solution employs a phased array antenna and can track more than 30 satellites, which enhances distress beacon detection and expands coverage. The solution can detect and locate distress signals from more than 5,000 km away.
MEOLUT Next is used by other COSPAS-SARSAT users including Canada, the United States, France, the European Union, Togo and Thailand.
The CHCNAV CGI-610 GNSS/INS sensor is an advanced dual-antenna receiver designed for reliable and accurate navigation and positioning in challenging terrestrial, marine or airborne applications.
Designed to meet the needs of 3D positioning and autonomous vehicle guidance applications, it provides high performance in urban canyons and other harsh environments where GNSS signals are lost or degraded. Incorporating the latest GNSS technology and an industrial-grade inertial measurement unit, the sensor delivers accurate hybrid position, attitude and velocity data up to 100 Hz, driven by CHCNAV algorithms.
Its rugged and lightweight package ensures uninterrupted performance and meets high protection standards.
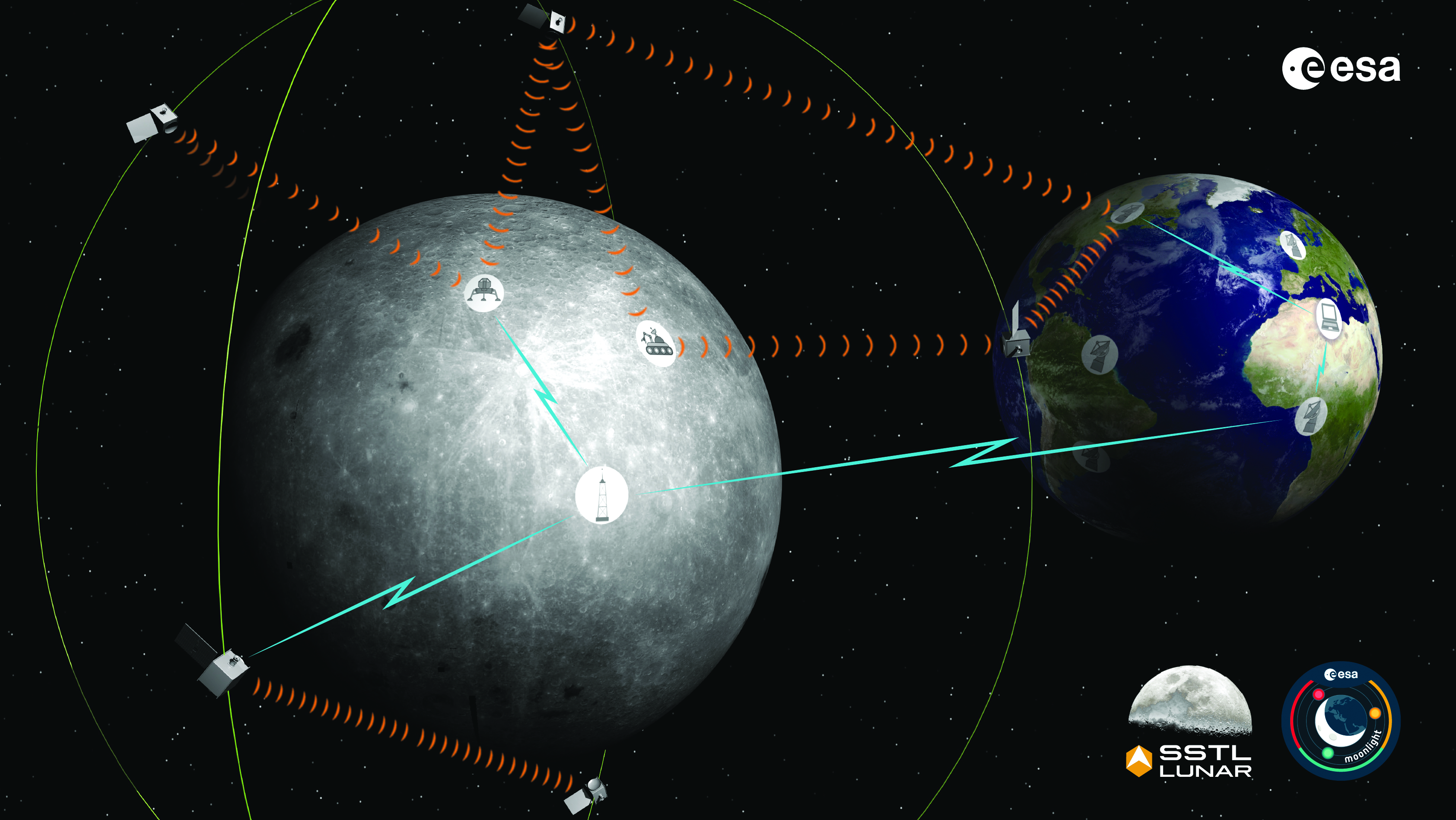
The Moonlight initiative will provide sustainable lunar data-relay services for communication and navigation around the Moon. (ESA Moonlight Study conceptual drawing.) (Image: SSTL/Airbus/ESA)
GNSS researchers presented hundreds of papers at the 2022 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 19–23 in Denver, Colorado, and virtually. The following five papers focused on lunar and space applications. The papers are available now.
MTO Navigation Using Lunar Signals
The moon transfer orbit (MTO) is becoming increasingly important as several national space agencies are planning moon exploration soon, with projects such as NASA’s Artemis. In previous research, the GPS navigation accuracy on the MTO reached 200 m at the moon altitude by using GPS signals emitted from the far side of Earth. As accuracy on a low-Earth orbit (LEO) using GPS is a few meters, 200 m accuracy is not accurate enough to support lunar exploration. The deterioration of accuracy is due to the poor geometry of the GPS satellites that became visible from the MTO.
The authors want to achieve an accuracy of less than 100 m in MTO by using other navigation sources, including the lunar navigation satellite system (LNSS) to be deployed in the moon’s orbit. The LNSS signals will come from the far side of the moon, similar to the signals of GPS satellites coming from the opposite side of Earth. Its satellites will be pointed towards the moon to provide positioning, navigation and timing services on the moon surface, especially at the lunar South Pole region
The researchers have been conducting the simulation evaluation for the MTO navigation accuracy using signals coming from the moon and assume that these signals will be emitted from beacons on the moon surface or the LNSS.
Murata, Masaya; Kogure, Satoshi; “Moon Transfer Orbit Navigation Using Signals Coming from the Moon.”
Designing the Smallsat-Based LNCSS
There is growing interest in the use of a smallsat platform for the future lunar navigation and communication satellite system (LNCSS); however, many design considerations are not finalized for the smallsat-based LNCSS, such as choice of the satellite clock, satellite orbital parameters and the constellation size.
Using the Systems Tool Kit simulation software, the authors examined various LNCSS constellation case studies based in elliptical lunar frozen orbit and with a low-grade chip-scale atomic clock.
They evaluated case studies of navigation design considerations including position and timing accuracy, lunar user equivalent ranging error, and dilution of precision. As for case studies of communications design considerations, the authors examined daily data volume, availability and data rate. Finally, they examined smallsat factors including the cost, size, weight and power of the satellite payload.
The paper includes trade-off analysis in satisfying the preliminary design criteria outlined by international space agencies and commercial space companies.
Bhamidipati, Sriramya; Mina, Tara; Sanchez, Alana; Gao, Grace; “A Lunar Navigation and Communication Satellite System with Earth-GPS Time Transfer: Design and Performance Considerations.”
Developing an SDR for Space
A geostationary satellite (GEO) equipped with the satellite-based augmentation system (SBAS) function has a transmitter for GNSS correction signals at the L1 and L5 bands. This transmitter could interfere with the GNSS space service volume (SSV) receiver in the same satellite, so L1 and L5 signals cannot be used for the GEO SBAS satellite. However, the use of GPS L2C signals can be an alternative.
The authors of this paper present the development of a GPS L2C signal generator for the SSV in GEO simulation. They present the simulation process for GEO satellites and the structure of the GPS L2C signal generator.
In this study, a verification through the receiver test with a GNSS software-defined receiver is included to show the possibility of the designed signal simulator. The validation is performed by analyzing the programmable system device, the results of the acquisition, code/carrier tracking, and the C/N0 estimation.
Lee, Hak-beom; Choi, ByeongHyun; Song, Young-Jin; Won, Jong-Hoon; Kwon, Ki-Ho; “Development of GPS L2C Signal Generator for SSV in Geostationary Orbit Simulation.”
Differential Positioning on the Moon
This paper introduces a new concept of delivering the pseudorange correction calculated at a reference station on the lunar surface, as a part of the lunar navigation satellite system (LNSS) navigation message. The concept enables LNSS users to apply differential positioning using pseudorange correction without adding new hardware to their receivers.
The authors propose the differential positioning technique to reduce the signal-in-space range error of LNSS satellites and the coordinate transformation errors from Earth-centered fixed frame to lunar reference frame — the dominant errors in satellite positioning by LNSS.
The proposed reference station is equipped with instruments to externally estimate its own position relative to the lunar reference frame. The user on the lunar surface would then perform differential positioning using the station coordinate and pseudorange correction obtained at the reference station.
In this study, the simulation results using eight elliptical lunar frozen orbit satellites show that the real-mean-squared values for both horizontal and vertical positioning errors with differential correction are reduced to 1/10 of those without differential correction, even at 10 degrees latitude from the reference station at the lunar South Pole.
Akiyama, Kyohei; Murata, Masaya; Kogure, Satoshi; “Differential Positioning Performance on Lunar South Pole Region Using Lunar Navigation Satellite System.”
GEO Precise Orbit Determination
Using GPS in satellites in geostationary (GEO) orbits provides advantages by improving position, velocity and timing data, reducing operating costs and providing autonomous orbit control for station keeping. This paper presents the result of the onboard data evaluation and precise orbit determination of an optical data-relay satellite (ODRS) using GPS L1 C/A code and carrier-phase observations for 74 days.
As a result of precise orbit determination, the authors found that both code- and carrier-phase observations are affected by the ionospheric delay when signals pass through the plasmasphere located above the ionosphere.
Several methods were implemented during this research to reduce the effect of the plasmasphere, including setting a higher cut-off altitude, applying correction sequences generated from orbit determination residuals, and applying a new observation noise model depending on the GPS off-nadir angle. Results show that the correction sequences and the new noise model improve the internal orbit consistency. The authors also found that the orbit bias in radial direction due to negatively biased carrier-phase observations is mitigated from –51 cm to –17 cm by setting a higher cut-off altitude and applying correction sequences.
Matsumoto, Takehiro; Sakamoto, Takushi; Yoshikawa, Kazuhiro; Kasho, Sachiyo; Nakajima, Ayano; Nakamura, Shinichi; “GEO Precise Orbit Determination Using Onboard GPS Carrier Phase Observations of Optical Data Relay Satellite.”
ComNav Technology’s K8 series GNSS modules can use the Galileo High Accuracy Service (HAS) precise-point positioning (PPP). The PVT algorithm upgrade to the K8 series module supports Galileo HAS with an accuracy of 20 cm horizontally and 40 cm vertically.
Galileo HAS provides free access to information necessary to estimate accurate positioning using a PPP algorithm in real-time through the Galileo signal E6-B and an internet connection. Galileo HAS Initial Service was declared on January 24, enabling users within the service area to achieve improved positioning performance.
The improved performance capabilities provide a higher level of accuracy for industries such as UAV, autonomous driving, intelligent transportation, agriculture and GIS collection.
Adtran and Satelles, a provider of secure time and location technology using low-Earth-orbit (LEO) satellites, have partnered to offer operators of critical infrastructure a timing network device with satellite, time and location (STL) technology. The partnership aims to provide an alternative to GNSS by integrating STL technology from Satelles into Adtran’s Oscilloquartz network synchronization products.
Through its partnership with Satelles, Adtran’s Oscilloquartz division will incorporate STL into its end-to-end timing toolkit. The companies will also integrate STL into its grandmaster clocks to develop miniature M.2 form factor STL receiver modules for third-party product integration.
With the ability to deliver precise position, navigation and timing (PNT) service in GNSS-denied applications, STL is suitable for mobile operators, power utility companies, government, scientific research and more. STL technology also offers accurate, secure and augmented Iridium LEO-based PNT services for indoor applications and as backup for GNSS outdoors.
Eos Positioning Systems has released its Arrow Gold+ GNSS receiver, which supports the Galileo high-accuracy service (HAS). Arrow Gold+ enables users to achieve better than 20 cm accuracy with 95% confidence using Galileo HAS.
The Arrow Gold+ is one of the first high-accuracy GNSS receivers that supports Galileo HAS and is designed specifically for the geographic information systems market. Additional signal support for Arrow Gold+ includes: the concurrent use of the BeiDou B3 and GPS L5 signals as well as GLONASS, BeiDou, QZSS and IRNSS signals.
Galileo HAS is a differential correction service from the European Space Agency and European Union Agency for the Space Programme. The service became available on January 24, and it is the first global differential correction service to provide sub-meter accuracy to compatible GNSS receivers anywhere in the world.
For more information on the Arrow Gold+ click here.
GNSS integrity is key to precision agriculture. (Image: fotokostic/iStock/Getty Images Plus/Getty Images)
In the world of global navigation satellite systems (GNSS), there are five key watchwords: accuracy, integrity, availability, continuity and coverage. While all five of those parameters are very important, their priority order depends on the application.
Accuracy: how well a measured or estimated position or time conforms with its true value. If you are a surveyor, accuracy and integrity are your biggest concerns. Accuracy is not to be confused with precision, which is a measure of exactness. It can refer to the number of significant digits reported for a measurement, the rigor of the measuring process, or the agreement among repeated measurements. For example, for locational error a measurement of 9.725m is more precise than 9.7m but may not be a more accurate measure of the error. A measuring instrument is precise if it repeatedly gives similar measurements, regardless of whether these are actually accurate. They could all be off by, say, 5m, due to some bias in the measurement process. In short, precise data may be inaccurate and accurate data may be imprecise.
Integrity: how much the information supplied by the system can be trusted to be correct. This requires the system to provide timely warnings to the user when the equipment is unreliable for navigation purposes—due to obstructions, jamming, multipath or any other event that degrades accuracy.
Availability: the percentage of time that a signal is available to the user. For location-based services, this and coverage are probably the most important parameters.
Continuity: the ability of the total navigation system to continue to perform its function during the intended operation. Continuity is critical whenever reliance on a particular system is high. For a pilot during an instrument approach procedure, continuity and integrity are vital.
Coverage: the area over which a signal is required. For farmers, it is their fields, for ships, the world’s oceans.