In the current context of the Russian invasion of Ukraine, the issue of GNSS jamming and/or possible spoofing has intensified in geographical areas surrounding the conflict zone and other areas, according to the European Union Aviation Safety Agency (EASA). The agency issued a safety information bulletin on March 17 warning of a GNSS outage leading to navigation / surveillance degradation. According to the bulletin, which was directed at national aviation authorities and airlines, reports analyzed by EASA indicate that since February 24 GNSS spoofing and/or jamming has intensified in four key geographical areas:
the Kaliningrad region, surrounding Baltic Sea and neighboring states
Eastern Finland
the Black Sea and
the Eastern Mediterranean area near Cyprus, Turkey, Lebanon, Syria and Israel, as well as Northern Iraq.
“The effects of GNSS jamming and/or possible spoofing,” the bulletin stated, “were observed by aircraft in various phases of their flights, in certain cases leading to re-routing or even to change the destination due to the inability to perform a safe landing procedure.” It pointed out that in the present conditions it is not possible to predict these outages and their effects. Potential issues include:
loss of ability to use GNSS for waypoint navigation
loss of area navigation (RNAV) approach capability
inability to conduct or maintain various operations
triggering of terrain warnings, possibly with pull-up command and
inconsistent aircraft position on the navigation display
loss of automatic dependent surveillance-broadcast (ADS-B), wind shear, terrain and surface functionalities
failure or degradation of ATM/ANS/CNS and aircraft systems that use GNSS as a time reference and
airspace infringements and/or route deviations due to GNSS degradation.
The bulletin also offers several recommendations to airlines for mitigating these issues.
No cause for the abnormalities has been determined, but the vicinity to the Russian border during the Ukraine war seems to indicate intentional interference. In particular, interference occurs near the Russian province of Kaliningrad situated between Lithuania and Poland, both NATO members.
An aircraft operated by Lithuanian carrier Transaviabaltika has been unable to fly from Tallinn to Savonlinna for three days.
Traficom, the Finnish Transport and Communications Agency, has received numerous occurrence reports regarding GPS signal interference observed by aircraft. The interference began during the weekend and is still continuing.
On Tuesday, several aircraft reported GPS signal interference in the region around Mikkeli, Jyväskylä and Kuopio. An aircraft operated by Lithuanian carrier Transaviabaltika has been unable to fly from Tallinn to Savonlinna for three days.
Kaliningrad is the capital of the Russian province of the same name, sandwiched between Poland and Lithuania along the Baltic Coast. (Map: Google)
After receiving reports about GPS interference, Traficom on Monday requested Fintraffic Air Navigation Services Ltd (Fintraffic ANS) to issue a Notice to Airmen for pilots flying in the area.
“Flying is still safe. Airlines have procedures they follow if the GPS signal is lost,” said Director Jari Pöntinen. “Aircraft can use other systems to navigate and land safely. Air traffic control supports aircraft pilots with the help of other landing systems.” For final approach, traditional approach systems do not require a GPS signal.
Airlines make their own decisions on whether they can operate in an area where there is known to be interference to the GPS signal.
Traficom does not know what is causing the interference, but stated it will continue to monitor the situation and gather more information on the matter.
Galileo second-generation satellites will be constructed at the Integrated Technology Centre (ITC) at Friedrichshafen, Germany. (Photo: Airbus)
Airbus satellite design passes important project milestone, preparing for industrialized manufacturing concept
Airbus has successfully completed the preliminary design review (PDR) for its system concept for the second-generation Galileo navigation satellites. During this important milestone, Airbus’ proposed preliminary design and the customer’s system requirements have been fully reviewed and agreed upon. Galileo is managed and funded by the European Union.
This milestone paves the way for further verification, acceptance and qualification at the equipment and module levels. Verification at the payload level is already in full swing, with the critical design review (CDR) for the satellite structure due shortly.
In parallel, the Airbus site in Friedrichshafen, on Lake Constance, is preparing for an industrialized production line for six second-generation Galileo satellites. The satellite integration center is being upgraded to meet requirements for these satellites.
Galileo Second Generation Batch#1B satellites. (Image: ESA).
Airbus is bringing to the project more than 200 highly skilled space engineers. The first Galileo second-generation satellites are expected to launch in 2024.
The second-generation Galileo satellites will make the Galileo service more accurate, secure, dependable and adaptable. Weighing 2.3 tons, each satellite is designed to operate for about 15 years. The all-electric medium-Earth-orbit (MEO) platform from Airbus reuses building blocks from the company’s telecoms and Earth observation programs. The flexible and modular navigation payload is also based on telecom elements for beam forming and signal generation.
QZS-R1 is prepped for testing. At left is the Earth-oriented surface that hosts the L-band antenna. (Photo: JAXA)
By Peter Steigenberger, Steffen Thoelert, Sergei Yudanov and Markus Ramatschi
The Japanese QZS-1R satellite was launched on Oct. 26, 2021, from the Tanegashima Space Center in Japan. It serves as a replenishment for QZS-1, the first spacecraft of the Japanese Quasi-Zenith Satellite System (QZSS) in orbit since September 2010.
QZS-1R joins the current QZSS constellation of three satellites in inclined geosynchronous orbit (IGSO) and one geostationary satellite. These four Block I satellites transmit the L1C/A signal at 1575.42 MHz.
QZS-1R, as well as future QZSS satellites, are able to transmit the new L1C/B signal. L1C/B is based on the same family of gold codes as L1C/A, but uses a binary offset carrier (BOC) modulation instead of the binary phase-shift keying (BPSK) and a different PRN range (203–206).
Compared to BPSK, the BOC modulation adds a square wave subcarrier with a frequency of fsc = 1.023 MHz that equals the chipping rate of the ranging code. This subcarrier shifts the peak spectral energy from the center frequency fL1 to fL1 ± fsc to reduce interference with the GPS L1C/A signals.
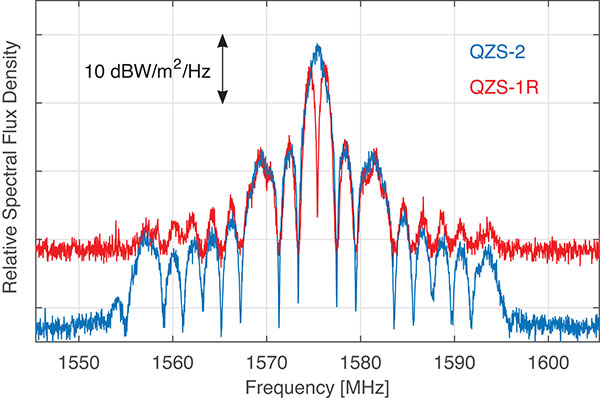
During in-orbit testing (IOT) from late November until early December 2021, QZS-1R transmitted L1C/A and L1C/B signals intermittently. FIGURE 1 shows a spectrum of the L1-band transmissions of QZS-1R recorded on Nov. 25 with the 30-meter dish antenna of the German Space Operations Center in Weilheim, Germany, as well as a spectrum of QZS-2 recorded in July 2017.
Figure 1. L1 spectra of QZS-1R (red) transmitting L1C/B and L1C, as well as QZS-2 (blue) transmitting L1C/A and L1C. The spectra were measured with DLR’s 30-meter high-gain antenna on Nov. 25, 2021, and July 20, 2017, respectively. (Credit: DLR)
During IOT, QZS-1R had an extremely low maximum elevation of 0.8° in Weilheim. Due to technical restrictions for such low elevations, QZS-1R had to be observed with a sidelobe of the 30-meter antenna. As a result, the respective observations are much more noisy than the QZS-2 reference data.
Nevertheless, the different spectral characteristics of L1C/B and L1C/A can be clearly seen in FIGURE 1: L1C/B has two maxima at 1574.4 and 1576.5 MHz due to the BOC modulation, whereas the BPSK L1C/A signal has one maximum at the center frequency of 1575.42 MHz.
GNSS receivers of the International GNSS Service (IGS) started to track L1C/A, L1C, L2C and L5 signals of QZS-1R on Nov. 17. Aside from the regular PRN code J04, test signals using the non-standard code PRN J06 were intermittently transmitted by QZS-1R during the IOT and tracked by these receivers.
Based on the public specification of the new L1C/B signal, Javad GNSS developed a prototype firmware that enabled tracking of this signal during the early transmissions. This firmware was installed on a Javad TRE-3 receiver operated by GFZ German Research Centre for Geosciences at its IGS station WUH200CHN in Wuhan, China.
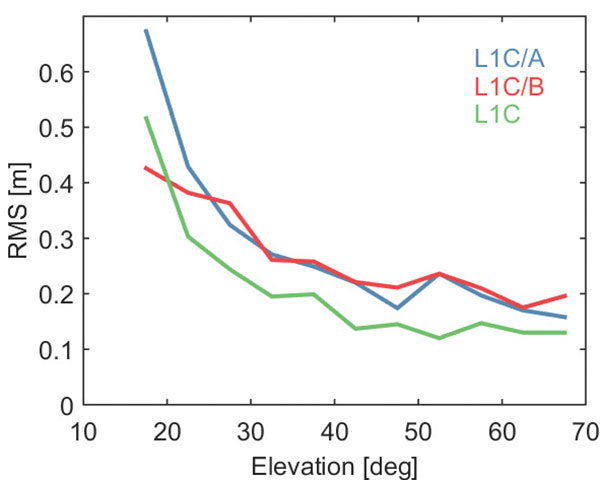
FIGURE 2 illustrates the noise and multipath characteristics of different QZS-1R pseudorange measurements. It is based on the so-called multipath linear combination of L1 pseudorange and L1/L2 carrier-phase observations covering a six-hour data arc. RMS values were computed for 5-degree elevation bins for each pseudorange signal. While the individual signals were tracked on different days of the IOT and the associated results have to be interpreted with care, the data indicate a very similar ranging performance of the legacy C/A signal and the new C/B signal. Best results are obtained with the L1C signal, which uses both a higher signal power and an advanced modulation with superior multipath suppression.
Figure 2. Noise and multipath characteristics of QZS-1R signals on the L1 frequency tracked by the IGS station WUH200CHN in Wuhan, China. (Credit: DLR)
QZS-1R will resume continuous transmission of L1C/A as soon as declared healthy. The transition from L1C/A to L1C/B is planned for 2023-2024, when an operational QZSS constellation of seven satellites is reached. The launches of the IGSO satellite QZS-5, the geostationary QZS-6, and the quasi-geostationary QZS-7 are all planned for 2023.
GNSS data used in this article were collected with a Javad GNSS TRE-3 receiver. The spectral overviews were captured with a Rohde & Schwarz FSQ26 signal analyzer.
Peter Steigenberger is a senior scientist at the German Space Operations Center of the German Aerospace Center (DLR), where he conducts research in the field of new satellite navigation systems.
Steffen Thoelert is an electrical engineer at DLR’s Institute of Communications and Navigation. His research activities focus on signal-quality monitoring and satellite payload characterization.
Sergei Yudanov is a senior firmware developer at Javad GNSS, Moscow. His main field of activity is GNSS signal processing.
Markus Ramatschi is a senior scientist at the Helmholtz Centre Potsdam, GFZ German Research Centre for Geoscience. He is operating a global GNSS reference station network.
Ramatschi M., Bradke M., Nischan T., Männel B. (2019): “GNSS data of the global GFZ tracking network,” vol 1. GFZ Data Services. https://doi.org/10.5880/GFZ.1.1.2020.001
By Satoshi Kogure Director, National Space Policy Secretariat Cabinet Office, Japan/QZSS Strategy Office
At 02:19:37 UTC on Oct. 26, 2021, a new satellite in the QZSS constellation — QZS-1R — was launched from the Tanegashima Space Center in Japan. It is the fifth satellite in the constellation and the replacement of the first satellite, launched in September 2010.
As of December 2021, initial on-orbit testing (IOT) and tuning of the precise orbit determination (POD) function in the ground control segment was ongoing. QZS-1R is the first QZSS satellite that will transmit the L1 C/B signal, splitting the power spectrum at the L1 center frequency by adopting BOC modulation on the existing C/A signal, to mitigate interference into the GPS L1 C/A signal. C/B signal transmission was verified during the IOT phase. QZS-1R will transmit the C/A signal continuously until QZS-5, 6 and 7 are launched and the noise floor increased.
The launch of QZS-1R was a milestone toward a sustainable national infrastructure for Japan. The Japanese government’s Cabinet Office (CAO) is trying to establish more secure positioning, navigation and timing (PNT) services by deploying seven satellites for the QZSS constellation. It will add three satellites to the current four around 2023.
This will give QZSS an independent PNT capability and enhance GNSS performance as well as robustness, and cover a broader area in the Asia Pacific region. CAO is still investigating the future of the QZSS constellation, including its final configuration and how to provide assured PNT services corresponding to future user requirements. However, it is thought that the full operational capability for Japan at minimum may be declared after the completion of the initial seven-satellite constellation.
Today, QZSS is providing ranging signals on L1C/A, L1C, L2C and L5 for all users able to acquire and track those signals. Those signals have the same RF properties and almost the same message format as the corresponding GPS signals — they are interoperable.
In addition, a unique characteristic of QZSS is that it transmits error correction messages available in Japan on separate channels — L1S, L1Sb and L6 — from those used to broadcast its ranging signals. Messaging functions are also provided through QZSS L1S and S-band two-way communication links on QZS-3 in support of disaster mitigation and relief operations in Japan.
CAO launched the QZSS operational services using a four-satellite constellation on Nov. 1, 2018. Its first three years of operation have provided much knowledge to improve their performance. The averaged signal-in-space user ranging error, a 95 percentile daily statistic, has been improved and achieved less than 1.0 meter, while the specification is 2.6 meters; the best daily value in the evaluation period (Aug. 31, 2020 to Sept. 1, 2021) was less than 0.5 meter for QZS-1, 2 and 3.
This remarkable improvement was shown on the Centimeter Level Augmentation Service (CLAS). According to the original design of CLAS, transmitted error corrections were for only 11 satellites in the GPS, QZSS and Galileo constellations. After two years of initial operation, we updated the ground control segment for CLAS to increase the number of augmented satellites from 11 to a maximum of 17. This increase in the number of satellites with error corrections leads to excellent improvement of CLAS performance in more challenging user environments such as urban and mountainous areas.
To improve the service performance further and measure new observables for satellite orbit clock estimation, inter-satellite ranging and two-way ranging functions between tracking station and satellite will be developed for QZS-5 to -7 and following satellites. The ground control segment will also be updated.
Multi-GNSS ADvanced Orbit and Clock Augmentation (MADOCA) precise point positioning (PPP) will be implemented as a practical service no later than 2024. It is aiming to provide decimeter-level PPP service with broadcast of globally available satellite orbit and clock error corrections as well as code-phase and carrier-phase biases.
PPP has a well-known disadvantage: long convergence time. By using the marginal L6D channel on QZS-5 to -7, the ionospheric delay correction for wide area will be distributed. CAO will try to evaluate how such ionospheric correction could reduce the initial convergence time for the PPP calculation. In an experiment planned in collaboration with Asian Pacific countries, regional stations in the nationwide CORS network will be used for generating such corrections.
Early or Emergency Warning Service (EWS) is also expanding its service coverage into the region. The common EWS format is being jointly investigated by India, the European Union and Japan under the UN-ICG framework. The QZSS EWS for the Asia Pacific region through the L1S signal on QZS-1R, 2, 3 and 4 will be established after completion of a ground segment update around 2024.
Ukraine’s hacker underground named GLONASS as one of its top priorities, according to media reports that cite a post on the “IT army” Telegram channel.
The IT army, formed on Saturday, is a collective of volunteer hackers. “We need to mobilize and intensify our efforts as much as possible,” the IT army posted.
Besides GLONASS, hackers are focusing on Russian telecom companies and the railway network in Belarus — a key staging area for Russia’s invasion of Ukraine.
The Belarusian Cyber Partisans, a hacking team focused on Belarus, told Reuters it had disabled railway traffic systems in Belarus. Another target is the electrical grid.
The open-source release of FGI-GSRx software receiver widens its user base and offers researchers, students and developers a chance to utilize the research platform for innovations.
The GSRx software receiver, developed by the Finnish Geospatial Research Institute (FGI), is now being released as open source for use by the GNSS community.
FGI-GSRx has been extensively used as a research platform for the last decade in different national and international research projects to develop, test and validate novel receiver processing algorithms for robust, resilient and precise positioning, navigation and timing (PNT).
FGI-GSRx has been used to develop algorithms for detecting GNSS jamming and spoofing events in several past R&D projects. It is also used to develop mitigation algorithms to offer a resilient PNT solution to the user.
The FGI-GSRx software receiver will be discussed in the next edition of the textbook GNSS Software Receivers by Borre, Fernández-Hernández, Lopez-Salcedo and Bhuiyan. The book will be published by Cambridge University Press in August.
Uses of the software receiver
The software receiver can be used in universities and other research institutes to provide graduate-level students and early-stage researchers with hands-on training in GNSS receiver development. It can also be used in the GNSS industry as a benchmark software-defined receiver implementation.
The software receiver is already being used in the “GNSS Technologies” course offered widely in Finland at the University of Vaasa, Tampere University, Aalto University and the Finnish Institute of Technology.
The open-source release of FGI-GSRx will enable any third-party developer, researcher or student to use the platform to develop, test and validate innovative algorithms. It offers a flexible interface and configuration files, so that researchers can further implement their own codes or algorithms at different receiver processing stages. This allows the user to go much deeper into the coding without addressing all the implementation details, explained Research Professor Zahidul Bhuiyan, FGI, National Land Survey of Finland.
Meeting evolving industry needs
The GNSS market has faced a transformation in the past two decades, with new features and signal properties being added to the modernized satellite navigation systems at an increasing pace. A software-defined receiver enables algorithm optimization and testing in this rapidly changing industry.
The multi-constellation FGI-GSRx receiver has evolved to provide diversity and improved accuracy. When the FGI-GSRx was first developed, it was able to track the Galileo test satellites GIOVE A and GIOVE B. Since then, FGI researchers have been continuously developing new capabilities to the software receiver with the inclusion of Galileo in 2013, the Chinese satellite navigation system BeiDou in early 2014, the Indian regional satellite navigation System NavIC in late 2014, and the Russian satellite navigation system GLONASS in 2015.
Russia’s space agency Roscosmos is suspending cooperation with Europe on space launches from the Kourou spaceport in French Guiana, including future Galileo satellite launches.
As reported by Rueters, Roscosmos chief Dmitry Rogozin said Saturday the action is in response to Western sanctions over Russia’s invasion of Ukraine.
“In response to EU sanctions against our companies, Roscosmos is suspending cooperation with European partners on space launches from Kourou, and is withdrawing its technical staff…from French Guiana,” Rogozin said in a post on his Telegram channel.
Russia’s decision will have “no consequences on the continuity and quality of Galileo and Copernicus services,” EU Commissioner Thierry Breton said in a statement. “This decision does not call into question the continuity of the development of these infrastructures either.”
“We are also ready to act with determination, together with the Member States, to protect these critical infrastructures in the event of an attack.”
“We will, in due course, take all the necessary decisions in response and resolutely pursue the development of the second generation of these two sovereign space infrastructures of the Union,” Breton said. “We are also prepared to act determinedly together with the member states to protect these critical infrastructures in case of an attack, and to continue the development of Ariane 6 and VegaC to guarantee the strategic autonomy with regard to carrier rockets.”
The Galileo program had already planned to shift to using Ariane 6 rockets for satellite launches. The launcher is undergoing the final stages of development, led by prime contractor ArianeGroup.
From 2023 onward, the remaining Galileo Batch 3 satellites will be launched with the new Ariane 62 launch vehicle, a variant of Ariane 6 with two strap-on solid boosters.
The most recent Galileo satellite launch took place on Dec. 5, 2021, using Soyuz launcher VS-26 to carry the first pair of Galileo Batch 3 satellites into orbit. The announcement will delay a Soyuz launch of two more Galileo satellites scheduled for April from French Guiana; a third pair of Galileo satellites was scheduled to launch in autumn on another Soyuz.
Galileo launch 11 from Europe’s spaceport in French Guyana. (Photo: ESA/CNES/Arianespace)
A U.S. Secretary of Defense once predicted that navigation would eventually be based on inertial devices that were set at the factory, and then always knew where they were forever after. Recently published research has reported on steps in that direction. However, according to navigation expert Brad Parkinson, the outlook is not as bright as some might think.
RNT Foundation President Dana A. Goward recently discussed the issue with him.
Goward: Dr. Parkinson, you are well known for your contributions as the chief architect of the Global Positioning System. But you have more than a passing familiarity with inertial systems also, is that right?
Parkinson: I do. Long before I was involved in radio navigation, I was the chief analyst for all the U.S. Air Force testing of inertial navigation systems. I earned my masters degree in Doc Draper’s Inertial Lab at MIT in 1961. I am a major advocate and defender of inertial systems. I also have in-depth understanding of their limitations.
Goward: Have you been following the recent media coverage about advances with inertial systems?
Parkinson: I enjoy reading about these advances in physics devices. At the same time, I am a little impatient with media articles that do not appreciate the differences between building a device that measures specific force (or senses rotation) and a working inertial navigation system.
Goward: What are some of the inherent limitations of these systems?
Parkinson: I find it interesting that some of the articles speculate they may be able to supplant GPS and other GNSS. There is no way an inertial navigation system, even with perfect gyros and force sensors, can provide its accurate position (say, better than 10 meters) after extended periods (hours to days). In fact, attaining better than 200 meters accuracy after a few hours will be very difficult in a moving vehicle.
Today, farmers require even greater accuracy from GPS. They routinely use GPS for row operations, with accuracies of a few centimeters. The economic value is indirectly measured by the farmer’s purchase of such equipment — the agriculture market for GPS equipment is well over a billion dollars a year. Thus, a general replacement for GPS must provide centimeter accuracies.
Goward: So, what is it about inertial systems that stands in the way of them becoming autonomous substitutes for GPS?
Parkinson: There are some very simple and fundamental reasons that inertial positioning systems cannot hope to deliver such capability.
First, force sensors are not accelerometers, because they cannot sense gravity. To find acceleration, one needs to add vector gravity to their outputs. But gravity, or g force, varies a lot at the micro-g levels, and the inaccuracies are fed to the double integration that produces position. Errors grow as time or time squared and, without outside reset, are essentially unbounded. The physics devices described in some of these articles are definitely instruments that Doc Draper described as “specific force sensors.”
What we loosely call g force, or just g, is actually the inverse of the reaction to maintain stationarity on Earth. G is defined to include the centrifugal force due to Earth’s rotation, which varies greatly as a function of latitude — the radius of the merry-go-round called Earth. Mountains and chasms affect the local g. Further, it is a vector quantity: its direction can change locally by many arc seconds. In other words, down does not generally point to Earth’s center. Gravity gradiometers might be of limited help, but they are very large and not made for dynamic environments.
In a nutshell, estimating acceleration requires calculating and adding gravity to the three-dimensional specific force sensor.
Second, to use these devices for extended navigation, coordinate frames would have to be defined and stable to milli-arc seconds. All instruments would have to have input axes and cross-axis sensitivity calibrated to corresponding levels. Generally, this problem is ignored in many lab projects.
Third, for inertial navigation sensors to work, they need to accurately know their initial position. Any initial velocity or position errors will grow as a function of time.
Fourth, the vertical position axis is inherently unstable and diverges exponentially.
Physicists have been enamored with instruments that can use atoms to sense specific force and rotation. While scientifically interesting, even if perfect they cannot overcome these challenges.
Goward: But there is still a role for inertial systems in navigation, isn’t there? How good are they, and what are some of the applications?
Parkinson: I suspect the best inertial systems of today (which are in nuclear submarines) can maintain an accuracy of about 0.1 nautical miles or about 200 meters for a few days. I am sure the real number is classified. These systems are very large, expensive and complicated. They rely on a very low acceleration environment and are periodically reset with GPS. Furthermore, they probably use gravity gradiometry to calculate the local variations in gravity to the first order. They do not calculate the vertical position, and use water density and knowledge of the local geoid to keep the vertical axis stable.
An aircraft with inertial can, to some extent, keep the vertical dimension errors bounded, provided it has knowledge from elsewhere of local sea-level barometer settings and by assuming adiabatic pressure variations.
I strongly support the inertial/GPS/directional antenna marriage for users who want assured PNT. Aviation is a good use case for this. Inexpensive inertial components (called micro-electromechanical systems, or MEMS) can improve the jamming resistance of the GPS receiver by 15 dB or more. This step alone can reduce the effective line-of-sight jammer denial area by more than 95%.
Goward: So, inertials can be a good part of the solution but are not necessarily the whole solution themselves.
Parkinson: Exactly. Despite what some media outlets might publish to lure in readers.
At the ION GNSS+ 2021 conference in St. Louis, Missouri, the annual meeting of the Satellite Division of the Institute of Navigation, Brad Parkinson bestowed Lakshay Narula with the division’s Bradford W. Parkinson Award for his Ph.D. thesis “Towards Secure & Robust PNT for Automated Systems” at the University of Texas at Austin. The award honors Parkinson, known as the “father of GPS,” for his leadership in establishing both GPS and the Satellite Division of the ION. Narula is now an applied scientist at Amazon Lab126 in Sunnyvale, California, where he researches robust navigation and state estimation methods for robots, from self-driving cars to aerospace applications. (Photo: ION)
Russia’s military could target GPS and communication satellites as part of its war in Ukraine, reports Space News.
The news outlet cites U.S. National Reconnaissance Office (NRO) Director Christopher Scolese speaking Feb. 23 at the National Security Space Association’s Defense and Intelligence Space Conference.
“I think we’re seeing pretty clearly that Russia is committed to doing what they want to do in Ukraine, and they want to win,” Scolese said. “So I think it’s fair to assume that, to the extent that they can, and to the extent that they feel it won’t extend the conflict out of their control, that they will extend it into space.”
An attempt to disrupt the United States’ space ability could affect satellites of private operators as well, such as Maxar, which is distributing imagery of the conflict.
A next-generation GPS III satellite on orbit. (Artist’s Rendering: Lockheed Martin)
In mid-November, Russia destroyed a retired satellite with a ground-based anti-satellite (ASAT) weapon. This created significant debris, which endangered other assets in low-Earth orbit, including the International Space Station (ISS). Two Russian cosmonauts were serving on the seven-person ISS crew at the time.
Based on the ASAT demonstration and unclassified reports from the U.S. Director of National Intelligence, it is pretty clear that Russia can destroy all, or at least most, GPS satellites in one go.
What is less clear, is whether Russia would really do that.
To find out, Dana A. Goward spoke with George Beebe, who once served as the Central Intelligence Agency’s top analyst for Russia and Eastern Europe. He is now the director of programs at the Center for the National Interest, a center-right think tank.
Dana A. Goward: Russia’s threat to destroy GPS was made shortly after they destroyed an old satellite in space. What do you make of that demonstration, and all the dangerous debris it created?
George Beebe: Well, they were clearly sending a message — several messages, in fact. First, of course, that they have the ability to destroy satellites in space. This is part of a larger narrative they want to tell — that they are a world power which must be reckoned with. And it is no coincidence that this was done while they were amassing troops along Ukraine’s borders.
Another message is that they know the U.S. and Europe are very dependent on space, and we are vulnerable there.
DG: But the space debris will threaten satellites and people in low-Earth orbit for years to come. That seems to be reckless and counter to their own interest.
GB: While others see that as reckless and irresponsible, Russian officials almost certainly see it as an expression of resolve. That was actually another message. They were saying, “We are willing to endanger our own equipment and people.”
Translate that to their concern about keeping Ukraine from joining NATO and otherwise falling into the West’s sphere of influence. It might be, “We are willing to accept the pain in order to keep Ukraine from leaving our orbit.”
Unfortunately, I am not sure most Western leaders picked up on the “We are resolved” message.
DG: Attacking GPS would be a huge, devastating and dangerous move, though. How could things get so bad they would do that?
Beebe is the author of The Russia Trap. (Cover: Thomas Dunne Books)
GB: Russia sincerely believes it is generally threatened by the West, and specifically by NATO.
Since the fall of the Soviet Union, they have seen their global influence recede, and Western influence on their borders greatly expand. Some of their neighbors have joined NATO. Others, like Ukraine, have not, but would like to eventually come under the NATO umbrella. For the Kremlin, this is unacceptable. It is akin to what Soviet missiles in Cuba were for the United States.
Over the last decade and a half, Putin has rebuilt the Russian military. He is now looking to draw lines in the sand for the West to not cross.
At the same time, the West feels threatened by Russia. Hitler’s aggression and refusal to be appeased by territorial concessions is standard reading in every Western history class. American and European leaders feel compelled to hold the line and not give into what they see as Putin’s territorial ambitions.
This is a very dangerous situation as both sides see themselves acting defensively and the other acting aggressively.
DG: I guess it is much easier to justify something to yourself and your compatriots if you think you are only acting in self-defense.
GB: Exactly. The problem comes when one side does something in self-defense and, in response, the other side feels compelled to do something as well. This can spawn an escalating tit-for-tat that spirals out of control into a bigger conflict no one wants.
DG: The West is imposing economic sanctions. At least that is harder to interpret as aggressive.
GB: Before World War II, the U.S. imposed severe economic sanctions on Japan in response to its expansionist moves in Asia. The sanctions were so severe that they were crippling and threatened to bring down Japan’s military government. The week before Pearl Harbor, the Japanese delivered a diplomatic note to the United States saying the sanctions amounted to an act of war. So, economic sanctions are not always an absolutely safe route.
DG: Do you think Russia would ever really attack GPS? And how might that go down?
GB: It depends on how backed into a corner they feel. They certainly know that our military and our homeland are very dependent on GPS, and we have no real alternative in place. It doesn’t help that they are much less dependent on GLONASS and have an alternative for when signals from space are not available.
So, they can definitely do more harm to us than we can to them by interfering with navigation satellites.
It would take a lot to goad them into physically attacking GPS satellites. That would be an irreversible step they undoubtedly understand could lead to all-out war.
Far more likely would be a cyber-attack on the systems controlling the GPS constellation. Such an attack could be harder to attribute to them. It could also be reversed if they got what they wanted.
I could also see them jamming GPS and Galileo signals across Europe and the United States as part of an escalated conflict. Russian forces excel at electronic warfare, and the jamming could easily be turned off once they achieved their goals, or if things seemed to be getting out of hand.
Photo: Stanislav Ostranitsa/iStock/Getty Images Plus/Getty Images
Abstracts for the ION GNSS+ 2022 show, “GNSS + Other Sensors in Today’s Marketplace,” are due March 4.
The ION GNSS+ conference will take place September 19-23 at the Hyatt Regency Denver at Colorado Convention Center in Denver. The show will also include a virtual option.
The 2022 conference will bring together international leaders in GNSS and related positioning, navigation and timing fields to present new research, introduce new technologies, discuss current policy, demonstrate products and exchange ideas.
The two tracks covered during the conference will be commercial and policy tracks and research tracks.
The commercial and policy tracks will include high performance and safety critical applications, status and future trends in GNSS, and mass market and commercial applications. The research tracks will include multisensor and autonomous navigation, algorithms and methods, and advanced GNSS technologies.