Alpha Unmanned Systems (Alpha) in Madrid, Spain, has been developing and building helicopter UAVs for 10 years and has successfully employed them with defense departments in 10 countries. Its UAVs are ruggedized and qualified for the harsh conditions encountered at sea. The fully autonomous A800 and more recent A900 model UAVs have been used in military applications such as border patrol, situation awareness, intelligence gathering, coast guard support and aerial helicopter target simulation. Commercial applications include fishing fleets and oil rig support.

The helicopter UAVs are equipped with a GNSS/MEMS autopilot system that maintains navigation if GNSS is jammed. MEMS sensors, however, can experience significant drift over time. The Alpha model offers two additional backup solutions. With an advanced air data system and pitot sensors, the aircraft can estimate airspeed and wind velocity to help maintain its flight path. If attitude estimation degrades further, remote pilot judgment may be required to recover control. For ground operations, a visual navigation system with a downward-looking camera can record terrain during overflights, building a database that enables navigation in GNSS-denied environments.
One of the newer capabilities Alpha has added includes an Automatic Identification System (AIS) receiver. AIS is a primary radar transponder system used by ships around the world to provide each other with tracking information on other ships that are within about a 30-mile range. With an AIS receiver onboard the UAS surveillance helicopter, ships that are out of visual range, maybe out close to the horizon, now become trackable.
Alpha is a small company that has been in operation since 2014, and it is one of the first to design helicopter UAVs for rough weather and at-sea environments. It’s good to see a focused, supportive outfit gradually succeed, not only with European defense organizations, but also in the U.S. and around the world.
Meanwhile, in a universe that’s not far, far away — in fact, in our solar system — plans are moving forward at NASA to visit Titan with a UAV. Titan is a moon of Saturn that is most favored to have the capability to start, and maybe support, life. Numerous organic compounds have been detected during earlier satellite visits. But this is no ordinary UAV, quite unlike Ingenuity, the solar-powered hopper that NASA flew 72 times on Mars.
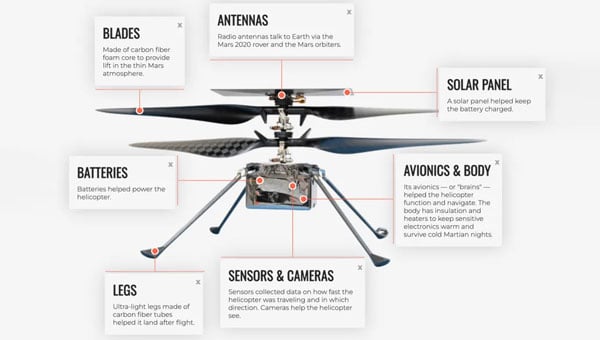
NASA’s Ingenuity helicopter, which traveled to Mars attached to the Perseverance rover, was designed to demonstrate powered flight in the Red Planet’s thin atmosphere. Ingenuity featured oversized rotor blades to generate enough lift and was built to be as lightweight as possible. Its only equipment was a camera and speed sensors, with no scientific instruments aboard.
The helicopter performed flights over Jezero Crater, ultimately spending about 130 minutes aloft and covering 11 miles during 72 flights. Ingenuity’s mission came to an end after it sustained damage to a rotor during a hard landing, grounding the aircraft and concluding its operations on Mars.
The next interplanetary unmanned flying system is significantly more complex, replacing the lander and drone approach used on the Red Planet with a complete vehicle capable of flying and conducting the necessary investigative science. With a budget of $3.35 billion, NASA’s work has been underway since 2024, led by John Hopkins Applied Physics Lab, and a host of main and supporting organizations, including Lockheed Martin Space, Malin Space Science Systems (cameras), Honeybee Robotics (Blue Origin subsidiary, moon lander development) and participation by agencies in France, Germany and Japan. While Ingenuity was developed and built by UAV manufacturer AeroVironment with management/support from NASA/Jet Propulsion Labs (JPL), the team for Dragonfly appears to have a few industrial partners and extensive government support – hopefully, this works out!
Powered by a Radioisotope Thermoelectric Generator (RTG), Dragonfly has four sets of double rotors, landing skids, and, of course, has to be fully autonomous – the radio transit time between Titan and Earth is between 1 hour 10 minutes and 1 hour 40 minutes. Titan’s night is eight Earth days long, so the idea is to fly during the day (throughout 15 Earth days), then land and recharge batteries, and receive NASA’s instructions for the following day’s activities during the long night. The atmosphere is thought to be substantially composed of nitrogen and methane, four times thicker than Earth’s, and gravity is about 1/7, so 4 ft props with enough lift and power could carry the 880 lb to 990 lb UAV up to 10 miles for each flight at altitudes of up to 12,000 ft. But when observing and imaging the terrain, we might guess it would probably mean mostly low-level flights.

At this weight, we are looking at something quite substantial to be flying around the anticipated sand dunes and frozen methane surface of Titan. Autonomous operations will need to be tight and safe for this big vehicle to operate and survive; it’s not exactly a small car, but quite substantial. Not to mention that landing will need to be somewhat delicate to protect the sensitive onboard instrumentation.
A spacecraft is scheduled to launch aboard a SpaceX Falcon Heavy in 2028, embarking on a complex journey that includes a flyby of Venus and a gravity-assist maneuver past Earth to set a direct course for Saturn’s moon Titan. The probe is set to enter Titan’s dense atmosphere directly, protected by a heat shield. After initial deceleration from atmospheric drag, two drogue parachutes will deploy, followed by a powered descent to the equatorial region known as the Shangri-La dune fields.
The voyage is expected to take six years, with arrival at Titan in 2038. Once on the surface, the Dragonfly mission will begin a 2.7-year exploration of the moon.
An interesting initial glimpse into a future, really advanced drone are undertaking. Hopefully, NASA will keep to its schedule, the budget holds up, and we start to see hardware in the next few years. Meanwhile, Alpha could be on version 16 of its UAV helicopter by then and achieve massive success with its multi-mission UAV applications.