The inaugural European Drone Summit will be taking place Oct. 15 in Frankfurt, Germany.
According to event sponsor UAV DACH e.V., the conference will give operators, manufacturers and public authority representatives the chance to gather and discuss the potential modes of operation and applications that are opening up for professional drone service providers and companies in light of the unmanned aircraft industry’s new European general aviation regulation.
Keynote speakers at the event will include Peter van Blyenburgh, UVSI; Max Scheck, Vereinigung Cockpit; Jules Kneepkens, EASA a.D.; Martin Brandenburg, DJI; Andreas Lamprecht, AIRMAP; and Jörg Seebach, DeDrone. The Intel Drone Group’s Anil Nanduri will also present a keynote speech.
“We are delighted that high-ranking experts from different companies, some of whom are even competitors, have accepted our invitation to come on board,” said Michael Wieland from UAV DACH e.V. “Global players’ first-hand experience and solutions offer added value to everyone taking part.”
The goal of the European Drone Summit is to channel ideas and decisions relating to unmanned aircraft systems (UAS) in order to highlight how unmanned aerial vehicle technology can be used now and in the future by representatives of various sectors, organizers said. The summit will take place at the same time as Intergeo, which will take place Oct. 16-18.
MAGNET Inspect is designed for UAV data collection. (Photo: Topcon)
Topcon Positioning Group has introduced software to facilitate the data-processing workflow for UAV (unmanned aerial vehicle) infrastructure inspection.
MAGNET Inspect efficiently manages large UAV data sets to create inspection reports. It is designed to allow operators to easily visually navigate UAV photos, aligning 3D reality meshes with raw georeferenced images in one location and filtering them based on selected criteria including field of view.
“MAGNET Inspect will work with models from virtually any UAV,” said David Ahl, director of software product management. “When combined with Intel Falcon 8+ Drone – Topcon Edition and Topcon ContextCapture, powered by Bentley Systems, the software enables operators to efficiently navigate, annotate and create reports with inspection photos, effectively creating a very strong end-to-end inspection workflow.
MAGNET Inspect is now a key element of the Topcon end-to-end UAV and data processing workflow for inspection projects, Ahl said. It’s use aims to increase safety and speed data collection compared to traditional methods.
“The software allows operators to easily document the observations and report them. Images from the inspection can be flagged to indicate whether there are structural issues and annotated with built-in free-hand graphical tools. Data reports can then be created to include a preview image and link to high resolution annotated image,” Ahl said.
The ThunderBuild program. (Photo: Topcon/ThunderBuild)
Acquisition of ThunderBuild. In another announcement, Topcon announced the acquisition of ThunderBuild BV Group, expanding the portfolio of Topcon paving solutions. Based in Eindhoven, the Netherlands, ThunderBuild develops software related to logistics management with a primary focus in the asphalt market, as well as additional applications that pertain to the transport of bulk materials.
GNSS receiver manufacturer Septentrio has added the AsteRx-i S to its GNSS/INS product portfolio.
The AsteRx-i S combines Septentrio’s compact, multi-frequency multi-constellation GNSS engine with an ultralight external industrial-grade MEMS-based inertial measurement unit (IMU).
Designed around demanding requirements for size, weight, power consumption and temperature variation, the AsteRx-i S is designed for various applications such as inspections with UAVs, UAS photogrammetry, automation, robotics and logistics.
Calibrated for wide temperature ranges, the AsteRx-i S delivers accurate and reliable GNSS/IMU integrated positioning to the centimeter-level, as well as full attitude at high update rates and low latency, the company said.
Key benefits for users include:
GNSS/INS positioning with 3D attitude: heading pitch and roll
AIM+ interference monitoring and mitigation system
High-update rate, low-latency positioning and attitude
Small and ultralight IMU (10 grams)
Robust calibration for wide temperature ranges
“We are delighted to broaden our AsteRx-i GNSS/INS solutions range, bringing maximum flexibility and choice to our customers,” said Francesca Clemente, product manager at Septentrio. “Whether for direct georeferencing in mapping applications with UAVs, for managing containers in a port or for innovative small robots in agriculture, the compactness, affordability and robustness of the AsteRx-i range allows our customers to focus on their success.”
The Piksi Multi GNSS receiver. (Photo: Swift Navigation)
Swift Navigation has upgraded the firmware to its flagship product — the Piksi Multi GNSS receiver. This marks the sixth major release to Piksi Multi since it was launched in February 2017.
The upgrade is available free of charge to Swift customers.
The firmware release also enhances Duro, the ruggedized version of the Piksi Multi receiver housed in a military-grade, weatherproof enclosure for long-term outdoor deployments.
Swift Navigation is a San Francisco-based tech firm building centimeter-accurate GNSS technology and a cloud-based corrections service to power a world of autonomous vehicles, the company said.
The Duro enclosure. (Photo: Swift Navigation)
Firmware Release 2.0 for Piksi Multi and Duro supports two additional major satellite constellations — the Chinese constellation (BeiDou B1/B2) which, once completed, will contain 37 satellites and the European Union-based constellation (Galileo E1/E5b), which will eventually consist of 30 satellites.
Adding to the existing GPS, GLONASS and SBAS constellations already supported by Swift’s GNSS receivers means that users will have more access and visibility from satellite systems across the globe.
Piksi Multi’s performance will further improve over time as the total of 136 satellites planned for these major constellations are fully deployed.
The addition of BeiDou and Galileo constellations creates more robust positioning performance in a variety of challenging skyview environments and puts Piksi Multi on par with leading industry receivers costing up to ten times a much.
With this 2.0 release, Piksi Multi is feature-complete, and Swift’s engineering team has delivered on planned product features on the Piksi Multi Product Summary.
MSM Messages 4-7. The new firmware adds support for RTCM 3.2 Multi Signal Messages (MSM). Though Swift devices already support RTCM 3.1, the addition of MSM allows for another flavor of differential corrections supported by BeiDou and Galileo, while also supporting both GPS and GLONASS with MSM new messages. MSM also allows for interoperability with other existing third-party GNSS receivers for all modern signals and constellations.
Fix Improvements. Firmware 2.0 provides Piksi Multi and Duro improvements on fixing in long base lines in poor atmospheric conditions, making the devices more resilient to Ionospheric effects during periods of high Ionospheric activity.
Higher Baud Rate Support for UART. New baud rates were added including 460800 and 921600.
Acquisition Improvements. Enhancements made allow Piksi Multi and Duro to power on to a usable signal more quickly and acquire satellites in start-up mode faster, by several seconds.
“The growing Swift engineering team has been hard at work developing Piksi Multi to its full potential,” said Samir Kapoor, executive vice president of engineering and product at Swift Navigation. “With support for all modern satellite constellations and multiple performance improvements, Piksi Multi offers unmatched affordability, priced at ten times the savings yet on par with other leading GNSS receivers.”
“Swift’s vision of making GNSS devices that are centimeter-accurate, with fast RTK convergence times and robust positioning performance all at highly-competitive prices has come to fruition,” Kapoor said. “With Piksi Multi feature complete, we look forward to adding to our line of products with additional offerings later this year.”
Photo: iStock.com/NiseriN via the Federal Aviation Administration
In cooperation with the U.S. Department of Defense (DoD), the Federal Aviation Administration (FAA) is establishing restrictions on drone flights up to 400 feet within the lateral boundaries of National Geospatial-Intelligence Agency (NGA) facilities.
The temporary flight restrictions — specific to unmanned aircraft systems (UAS) — apply to three NGA facilities in or near St. Louis:
National Geospatial-Intelligence Agency (NGA) West
NGA Next West
NGA Arnold
In June, the FAA responded to federal agency requests and restricted drone operations over penitentiaries and Coast Guard bases.
The Federal Aviation Administration (FAA) is using its existing authority under Title 14 of the Code of Federal Regulations § 99.7 — “Special Security Instructions” — to address concerns about drone operations over national security-sensitive facilities.
The changes, which are highlighted by FAA NOTAM FDC 8/7350, are pending until they become effective on Aug. 30.
Only a few exceptions permit drone flights within these restrictions, and they must be coordinated with the individual facility and/or the FAA.
Operators who violate the flight restrictions may be subject to enforcement action, including potential civil penalties and criminal charges.
To ensure the public is aware of restricted locations, the FAA website also provides an interactive map, downloadable geospatial data and other important details. The restrictions also are depicted in the FAA’s B4UFLY mobile app. Broader information regarding flying drones in the National Airspace System, including frequently asked questions, is available on the FAA’s UAS website.
The FAA continues to consider additional requests by eligible federal security agencies for UAS-specific flight restrictions using the agency’s § 99.7 authority as they are received. Additional changes to these restrictions will be announced by the FAA as appropriate.
The attack seems to have been mounted by those operating two small six-rotor UAVs similar the DJI Matrice 600 — one was certainly carrying explosives because it was videoed exploding. These drones showed up somewhere near Maduro and disrupted not only the president’s speech, but also broke up the parade with participants running for cover.
One drone seemed to collide with an apartment building, fell to the ground, and then fire broke out in an apartment on the first floor. Firefighters apparently disputed a drone explosion saying that a propane gas tank had exploded inside an apartment, but images show a significant hole blown in the wall below the apartment window.
A number of discrepancies could suggest that the incident was staged, but there were injuries to several in the parade below where the first drone exploded, and the apartment fire was only 400 meters from Maduro’s review stand. The “apartment drone” appeared to behave as if control had been lost, possibly due to anti-drone jamming. Check out pictures, a video and a comprehensive analysis of these events on Bellingcat here.
Zephyr-S launched for flight test. (Photo: Airbus)
Meanwhile, on a more drone-positive note, the Airbus Zephyr S pseudo-satellite, solar-powered UAV achieved a world endurance record flight which was just 3 minutes short of 26 days, eclipsing a previous record of 14 days set by a Zephyr prototype. The ultra-lightweight UAV took off July 11 July and landed Aug. 6. This is likely the longest ever flight by an air-vehicle without refueling (balloons and spacecraft excepted).
The Zephyr S is the first of three such vehicles built by Airbus for the U.K. Joint Forces Command. The Zephyr-S flies around 70,000 feet in the stratosphere, powered solely by sunlight, and is aimed at providing short turn-around, satellite-like communications and observation services for both commercial and military customers. The potential exists to support disaster monitoring of fires, earthquakes, oil spills and the like, and to connect almost everywhere in the world that doesn’t already have established communications.
Following evaluation of the flight test results, further flights are planned from a new base at Wyndham airfield in Western Australia. The aircraft is extremely light and does not have an undercarriage, so it’s hand launched and retrieved under minimal wind conditions.
Joe Lee and paramedics UAV pilot Scott Mcleod confer before a simulated medical rescue scenario. (Image: Kongsberg Geospatial)
Meanwhile, at a deserted airfield near Pembroke, Ontario, Canada, a simulated disaster exercise, led by a Royal Canadian Mounted Police (RCMP) incident commander and supported by personnel from Transport Canada and the National Research Council, was evaluating a new air traffic management system supplied by Kongsberg Geospatial from Ottawa.
Integrating drones with disaster management air traffic is one aspect of the Emergency Operations Airspace Management System (EOAMS), a situational awareness system which provides first responders with situational awareness of the airspace around a disaster scene. The system integrates real-time data from a number of sensors, including 3D airborne radar, ground radar, ADS-B (Automatic Dependent Surveillance — Broadcast) sensors, video and GPS. Real-time information was presented to participants on regular computer displays and through a Microsoft HoloLens “mixed reality” visor.
Drones were flown beyond visual line-of-sight (BVLOS) at up to 2 km away from the airfield while the trial emulated emergency scenarios including a plane crash, a medical emergency, and the protection of a VIP threatened by an approaching, unauthorized drone. Drones were operated by the RCMP and local paramedics.
The EOAMS system displayed ground tracks and the identity of a variety of emergency aircraft, and emergency ground vehicles, and enabled safe flight of UAVs within the same airspace. Non-participating drones in the area of the disaster were also identified as possible threats to police and medical aircraft involved in the recovery efforts.
The RCMP and paramedic pilots flew consumer-model drones including the DJI Mavic to test the system’s capacity to detect small drones. Position outputs from these drones were used to verify the accuracy of the EOAMS-displayed plots. A light aircraft was also used to simulate different airborne assets, including a water bomber.
What was learned in the trials will be useful in further development of future emergency airspace management systems for use by first responders, police services and other government agencies in Canada.
RoboTiCan, an Israeli start-up, has developed a unique way of dealing with unwelcome, unidentified drones that intrude into sensitive airspace. With ground-based radar detecting and tracking an incoming UAV, its large, robust drones use machine vision and artificial intelligence technologies to identify threats and then physically attack them.
This video provides — complete with dramatic accompanying music — an insight into how their “Goshawk” drone engages, attacks and by brute force, disables smaller drones in flight.
At first encounter, the Goshawk octocopter appears to also be disabled by an intentional collision with a small UAV, but subsequent encounters demonstrate how it hones in on, collides with, and disables its target and recovers to attack again.
Compared to bird behavior, especially in the spring when nesting birds use similar tactics to defend their eggs or chicks, it does seem that its mode of operation could be very much like a hawk attacking smaller birds — hence its name.
The Goshawk uses strong, fiber reinforced blades to enhance impact survival, while its smaller drone victims may have plastic props. Overall, it’s large, has multiple blades, seems to use an attack move just before impact, and it recovers well. So control algorithms appear to have been enhanced for collisions and recovery. Its targets seem to immediately lose lift and control before they hurtle towards ground impact.
Not surprisingly, RoboTiCan appears to be positioning its marketing towards military customers, but combining this aggressive take-down capability with a high-quality drone detection/location system might also be a winner for civilian/government drone intrusion defense — Mr. Maduro, take note!
To sum up, we have more bad press for UAVs being used as offensive weapons, interesting progress towards pseudo-satellites as Zephyr-S completes 26 days aloft in the stratosphere, another UTM (UAV Traffic Management) system trial aimed at better air traffic control for disasters, and another way to bring down unwanted drone threats.
This last solution might be a better deterrent for negligent or intentional operators who stray into inadvisable airspace. The potential destruction of the drone might just get some recreational flyers to think twice and perhaps reduce these problems.
NovAtel Inc. has launched its TerraStar-C PRO correction service with multi-constellation support, including the GPS, GLONASS, Galileo and BeiDou constellations.
Combined with NovAtel’s OEM7 positioning technology, TerraStar-C PRO cuts initial convergence times by nearly 60 percent and offers 40 percent better horizontal accuracy than the current TerraStar-C service, the company said.
NovAtel’s TerraStar-C PRO offers a robust multi-constellation solution that provides greater positioning accuracy, availability and reliability than before, the company added. With the growing number of operational GNSS satellites, TerraStar-C PRO offers benefits in challenging signal conditions such as multipath, shading, interference and scintillation. High-rate TerraStar-C PRO corrections provide reconvergence in less than 60 seconds following brief GNSS signal interruptions.
According to NovAtel, TerraStar-C PRO corrections are generated using TerraStar’s proprietary global network of more than 100 strategically located GNSS reference stations. The correction data is delivered worldwide through overlapping geostationary satellites directly to a NovAtel receiver or via cellular IP network.
With OEM7 triple L-band support, TerraStar-C PRO correction signals from up to three satellites can be tracked and used simultaneously, providing continuous correction data reception when the primary satellite signal is blocked.
“TerraStar-C PRO enables higher operational efficiency by allowing users to start operations sooner and continue to work through challenging conditions without interruptions,” said Sara Masterson, NovAtel’s positioning services segment manager. “We continue to build our TerraStar portfolio of services and with the addition of TerraStar-C PRO customers can trust that they have not only a highly-reliable precise positioning solution, but also services that immediately translate to increased productivity.”
TerraStar-C PRO is available immediately as a termed subscription service for agriculture, unmanned, airborne and land applications, such as survey, mapping and GIS and supported on compatible OEM7 products with firmware version 7.05 and later.
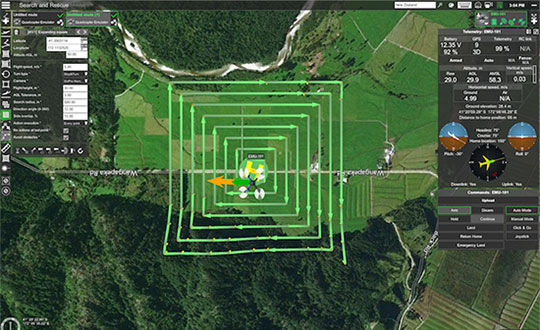
UgCS, a provider of mission planning software for unmanned aircraft systems (UAS), and public safety and disaster response UAS expert Airborne Response have developed a comprehensive search capability for drones that will allow remote pilots to more effectively conduct search-and-rescue operations using the UgCS platform.
The software enhancements will provide users with customizable search patterns such as the “expanding square” and “creeping line” that can be easily deployed in emergency and non-emergency situations.
Based on the flight altitude input by the operator, the UgCS software will automatically calculate key variables such as the course heading and track spacing necessary to provide the prescribed coverage area for a search target.
Tom “Oaty” Oatmeyer is an air rescue expert with 28 years of experience piloting helicopters for both the U.S. Air Force and the Miami-Dade Fire Rescue department. As an aircraft commander, Oatmeyer is credited with saving more than 150 lives during emergency and disaster response operations.
Oatmeyer worked directly with the UgCS development team to bring the new features to fruition.
“As first responders, we are trained to develop an emergency search plan using time-tested and proven tactics,” said Oatmeyer, chief pilot, Airborne Response. “The new enhancements to the UgCS mission planning software will allow remote pilots at every skill level to quickly plan and implement a professional search mission with a UAS.”
Airborne Response and UgCS will be hosting a joint web conference on Thursday, Aug. 16, at 2 p.m. ET to officially unveil the new search features of the UgCS mission planning software. Register here.
Also, Airborne Response and UgCS have reached an agreement for Airborne Response to offer the UgCS mission planning software and associated training to public safety and emergency response professionals throughout the U.S.
“When lives are on the line, every second counts,” Oatmeyer said. “UgCS now represents another valuable link in the UAS technology chain to enhance the public safety mission.”
“The new UgCS search feature is designed to make searching for a target with a drone as simple and reliable as possible,” said Janis Kuze, sales director at SPH Engineering. “We look forward to continue working with the Airborne Response team to further enhance the software capabilities and implement additional search pattern features.”
Two drones armed with explosives detonated near Venezuelan President Nicolas Maduro on Aug. 4 in an apparent assassination attempt that took place while he was delivering a speech to hundreds of soldiers, while the speech was being broadcast live on television, according to press reports.
The footage of this apparent assassination attempt can be viewed below.
Drone security solutions company DroneShield issued a statement about the incident.
“The history of commercial drone incidents involving heads of state goes back to September 2013 when the German Chancellor Angela Merkel’s public appearance was disrupted by a drone, which was apparently a publicity stunt by a competing political party,” said Oleg Vornik, DroneShield’s CEO.
“Yesterday’s apparent drone assassination attempt on Venezuelan President Maduro is the first known drone attack on a head of state. An attempted drone assassination of a sitting sovereign leader demonstrates that, sadly, the era of drone terrorism has well and truly arrived,” Vornik said.
“Technological progress cannot be reversed, and going forward, the security of any asset whose perimeter is protected two-dimensionally on the ground will need to be also protected in the third dimension — from attacks from the air,” Vornik added.
DroneShield supplies counterdrone (counter unmanned aerial system/counter unmanned aerial vehicle/c-UAS) products, which have been successfully deployed in a variety of situations by third parties.
The company’s products have been deployed for counterdrone security at, among others:
an ASEAN meeting of heads of state,
several Boston Marathon events over the years,
the PyeongChang 2018 Olympics and
the 2018 XXI Commonwealth Games.
Also, a Middle Eastern ministry of defense recently placed a multi-million dollar order for DroneShield’s anti-drone equipment.
The company expect that this latest incident involving a head of state will result in governments around the world accelerating their implementation of anti-drone mitigation measures.
A roundup of recent products in the GNSS and inertial positioning industry from the August 2018 issue of GPS World magazine.
OEM
IP Solution
With multi-constellation GNSS for internet of things (IOT) devices
The Dragonfly NB2 is a highly integrated and modular IP (internet protocol) solution optimized for Cat-NB2 (3GPP Release 14 eNB-IoT) that can seamlessly be incorporated into chips and modules by the multitude of companies looking to address the large and fast-growing cellular IoT space. GNSS hardware package. For customers developing NB-IoT products that also require GNSS capabilities, Ceva-Dragonfly NB2 includes a new power-optimized GNSS hardware package, with GNSS RF receiver and multi-constellation digital front-end. The GNSS package speeds up both acquisition and tracking tasks by up to 8 times compared to Ceva-Dragonfly NB1, enabling a host of popular NB-IoT use cases, including people, livestock and asset tracking and geofencing.
Provides timing accuracy and stability when GNSS signal is lost
Photo: Oscilloquartz
Oscilloquartz has launched its enhanced primary reference time clock (ePRTC) system to enable a high level of timing accuracy and stability, even when the GNSS signal is lost. The system provides a timing source for mission-critical transport systems, such as utility networks, government infrastructure and radio access networks, and provides the strict synchronization needed for LTE-A and 5G applications. Featuring the OSA 3230B ePRC atomic cesium clock connected to an Oscilloquartz clock combiner and grandmaster, the new solution offers the extremely stable frequency of a cesium clock with the UTC-traceable signal provided by GNSS. When combined with the OSA 5430, the OSA ePRTC system provides full hardware redundancy and multiple fan-out options including PTP over 10 Gbit/s.
The SE878Kx-A series of GPS and GNSS integrated antenna receiver modules offer high performance, maximum reliability and low power consumption for consumer and business applications. The SE878K3-A and SE878K7-A are compatible with GPS, GLONASS, Beidou and Galileo and also enable device vendors to develop quickly and cost-effectively location-based IoT solutions for use in virtually any country worldwide. The SE878Kx-A series supports dual internal-external antennas to ensure connectivity when one is broken or compromised, along with a SAW filter to maximize jamming immunity. The modules are designed for mission-critical applications and other use cases where reliability is key, such as alarms, stolen cars or high-end asset tracking. The series also provides seamless integration with Telit’s cellular modules, including eCall/ERA-GLONASS compliant solutions.
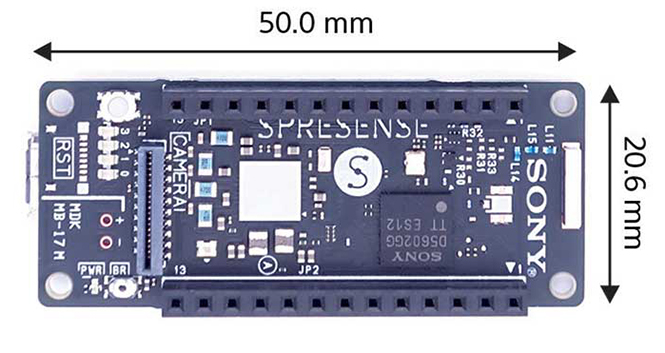
The Spresence main and extension boards are designed for internet of things (IoT) applications. The main board uses a multi-CPU structure equipped with Sony’s GNSS receiver (GPS+GLONASS) and high-resolution audio codec. A variety of systems for applications such as drones and other IoT devices can be built by combining the boards and developing the relevant applications. The boards’ software and hardware is available via open platform, allowing for a wide range of developmental possibilities. The main board can be used to control a drone using GPS positioning and a high-performance processor, voice-controlled smart speakers and low-power consumption sensing cameras. It also can be combined with sensors for use in systems that detect errors in production lines on the factory floor.
Designed for geopositioning, construction and mapping
Photo: Topcon
The T-18 handheld controller has a 3.7-inch sunlight-readable display, a 1-GHz processor and 1 GB of internal storage. For field data collection using Topcon’s MAGNET software, the T-18 offers a durable ergonomic solution with fast processing, excellent connectivity and a long (10-hour) battery life. It has a 3.5G cellular modem for connectivity with Topcon MAGNET solutions for sending and receiving data to the cloud company account. The modem also can be used for real-time kinematic (RTK) correction services. Other features include Bluetooth and an IP65 rating for dust and water protection in demanding job-site conditions.
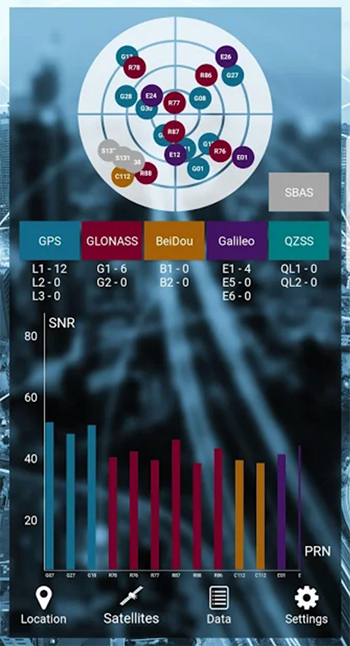
The SXblue ToolBox is an Android application for SXblue GNSS receivers, enabling users to view and analyze the position data and metadata related to its location. The user can send commands that enable or disable some features, including systems in use, mask angle or differential angle, and constellation in use, including GPS, GLONASS, Galileo, BeiDou and SBAS. The SXblue ToolBox is also an NTRIP client capable of connecting to a NTRIP server for real-time kinematic (RTK) corrections, allowing the receiver to issue very accurate location information. The application can record, save and transfer raw data from the GNSS receiver, allowing post-processing on computers for surveying and geomatics professionals.The toolbox has been developed with special consideration for modern mobile devices and attention to user and dealer feedback. It includes a series of configurable audible and visual alarms for determining the thresholds of the information provided by the SXblue GNSS receiver.
The Leica RTC360 laser scanner is equipped with edge computing technology to enable fast and accurate creation of 3D models in the field. It combines high-performance laser scanning, edge computing and mobile app technologies to preregister captured scans quickly and accurately. With the push of a button, two million points per second of high dynamic range imagery can be captured to create a full-dome scan in under two minutes. It features a visual inertial system that automatically tracks movements between setup positions. The scans captured can be combined and preregistered on a mobile device, where they can be viewed and augmented with information tags.
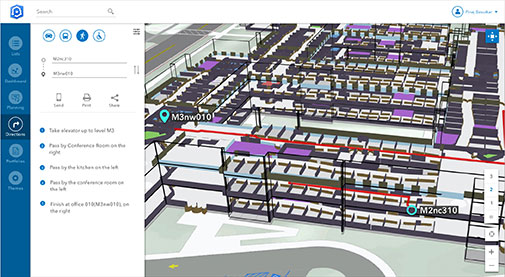
Location technology allows users to see rooms, gates and offices
Screenshot: Esri
ArcGIS Indoors is designed to enable interactive indoor mapping of corporate facilities, retail and commercial locations, airports, hospitals, event venues, universities and more. The solution applies the latest location technology to allow users to see and share where assets, rooms, departure gates and offices are located. It uses data streams, real-time processing and location intelligence tools to help businesses and other organizations understand how to better coordinate space and other resources with their facilities and campuses. Insights from sensor networks deliver real-time information to managers and executives through interactive dashboards, while visitors and employees can find useful information about the buildings they occupy. The solution also allows users to quickly access and explore critical business information, such as the location and status of fire extinguishers and their last inspection dates.
Meets demands for continuous, accurate vehicle location
The ASM330LHH module. (Photo: STMicroelectronics)
The automotive-grade ASM330LHH six-axis inertial sensor is designed for super-high-resolution motion tracking in advanced vehicle navigation and telematics applications. It lets advanced dead-reckoning algorithms calculate precise position from sensor data if satellite signals are blocked, such as in urban canyons, tunnels, covered roadways, parking garages or dense forests. Its advanced, low-noise, temperature-stable design enables dependable telematics services such as e-tolling, tele-diagnostics and e-Call assistance. Precision inertial data in six axes also meets the needs of advanced automated-driving systems. Automotive component manufacturer Magneti Marelli has selected the ASM330LHH for advanced telematics systems, to be fitted as original equipment by global automotive groups in upcoming vehicle ranges.
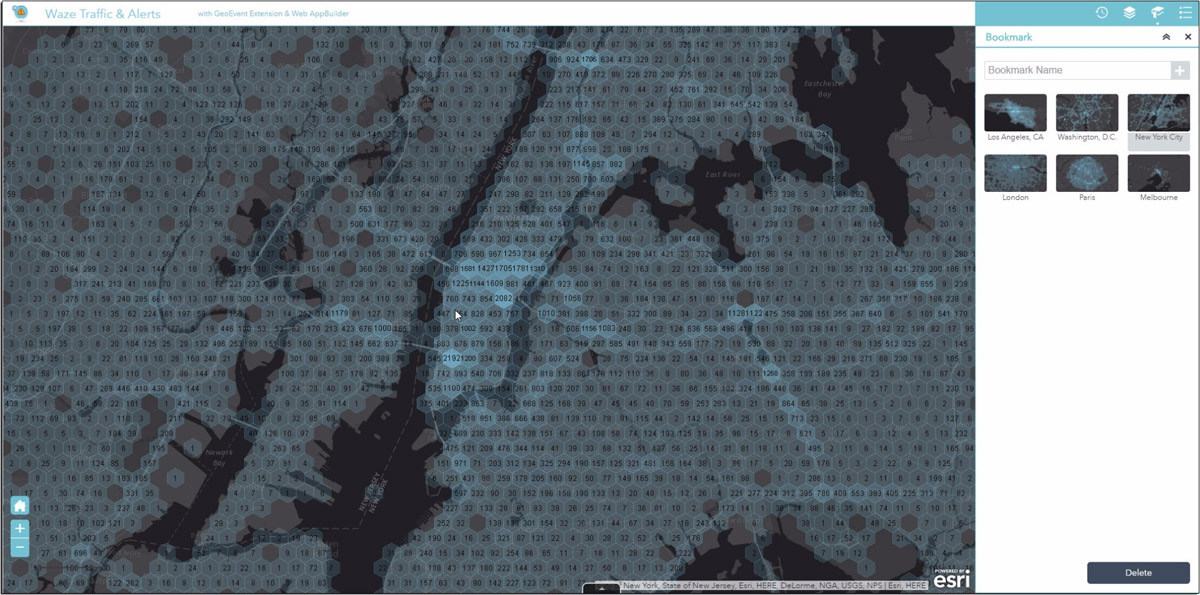
Esri and Waze smart cities partnership grows. (Image: Esri)
The free crowdsourced traffic and navigation app Waze is now fully supported by ArcGIS Online, where its live feed of mapped traffic alerts and other information, such as accidents, congestion and street damage, can be used in applications in minutes. Waze Live Alerts, available in ArcGIS Marketplace, is free to members of the Waze Connected Citizens Program. The program, a two-way sharing of publicly available traffic and road condition information, offers governments a stream of data, constantly updated in real time. This enables personnel to make data-driven infrastructure decisions and improves the efficiency of incident response.
Traffic engineers can use the data to analyze problems on the road and create targeted solutions.
Open-source platform for autonomous delivery and other iot
The AGL platform provides Mercedes-Benz Vans with the ability to create autonomous delivery robots. (Image: Daimler)
Automotive Grade Linux (AGL) is a collaborative cross-industry effort to develop an open platform for the connected car. Mercedes-Benz vans are using AGL as a foundation for a new onboard operating system for its commercial vehicles. The Mercedes-Benz “adVANce” initiative focuses on connectivity and internet of things (IoT) applications, innovative hardware solutions, new on-demand mobility and rental concepts, and fleet management solutions. The AGL platform provides Mercedes-Benz Vans with the flexibility to rapidly create tailored solutions for customers, including adding and connecting any kind of IoT component to the vehicle, such as sensors, automation controls and actuators. The new AGL-based operating system will debut on various Mercedes-Benz Vans prototype projects later this year.
eCyber is an integrated hardware-software product that protects vehicles against ransomware and other cyber-attacks. It can be installed in a vehicle by authorized parties, such as vehicle importers and fleet managers, in the aftermarket stage after the vehicle has left the factory, as well as by the OEM itself during manufacture. eCyber, a combined hardware and software solution in a compact box, is installed between the vehicle’s external communications device and the vehicle’s CAN (Controller Area Network) bus. It provides a secure gateway for outside communications to the CAN bus, allowing only communications with predefined parameters and values to go through. It blocks any unrecognized communications to and from the CAN bus, so no malicious digital communications can disrupt vehicle function.
Engineered for UAV-imaging missions, the iXM 100MP is a high-productivity metric camera with a range of high-resolution lenses. It is ready for integration with various UAV platforms, including Phase One’s DJI Matrice 600 Pro. The camera incorporates a medium-format sensor with backside-illumination technology, enabling high light sensitivity and extended dynamic range. Phase One also offers four new RSM lenses — with focal lengths ranging from 35mm to 150mm — to fit the new sensor’s 3.76 μm pixel size and 33 x 44 mm frame size. The lenses are available with either fixed-focus or motorized-focus functionality. The fixed-focus 35mm and 80mm lenses are especially suitable for surveying applications.
For quick approval of flights over controlled airspace
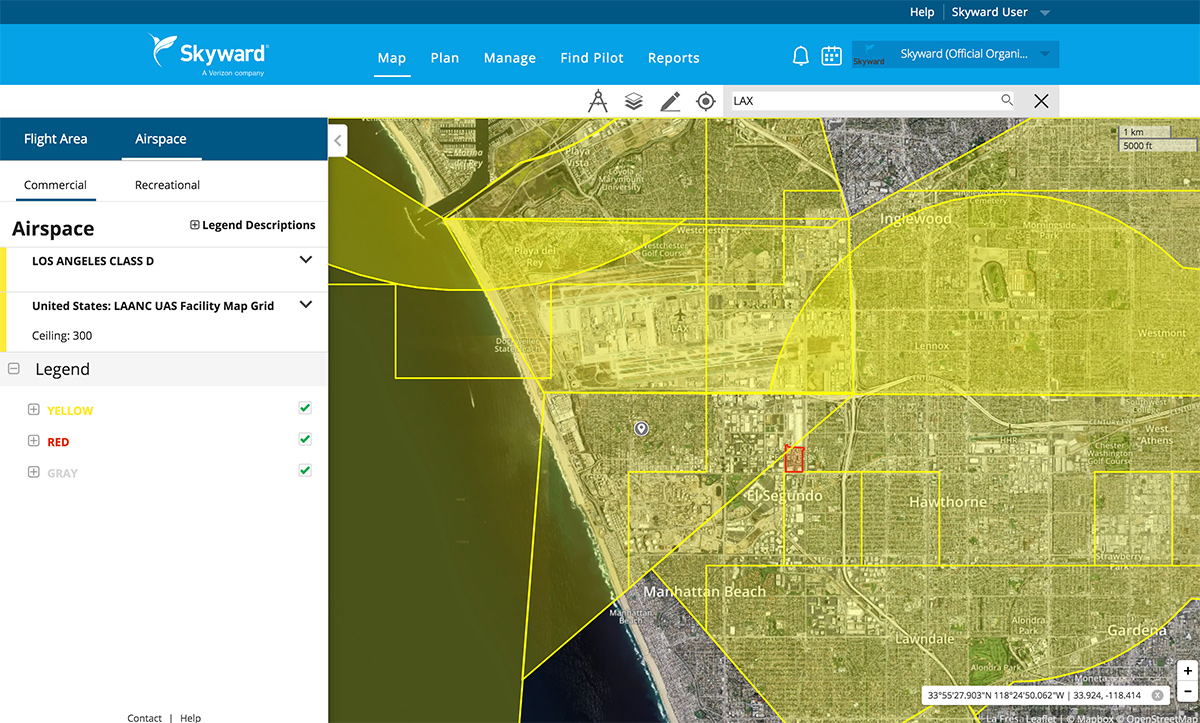
Screenshot: Skyward
Commercial drone operators in California and Hawaii — as well as a few areas in Nevada, Utah and Arizona — can get quickly authorized to fly in controlled airspace using the LAANC (Low Altitude Airspace Notification Capability) platform. Skyward is an FAA-approved airspace vendor. With Skyward, pilots with a Part 107 license can get permission to fly in regulated airspace in seconds compared to manual authorizations that can take months. This makes it significantly easier for businesses of all sizes, particularly in the construction and warehousing industries, to manage a fleet of drones to access valuable, cost-saving data. Skyward’s LAANC expansion includes airspace in the busy metro areas of Los Angeles, the Bay Area, San Diego, Las Vegas and more than 50 smaller air markets.
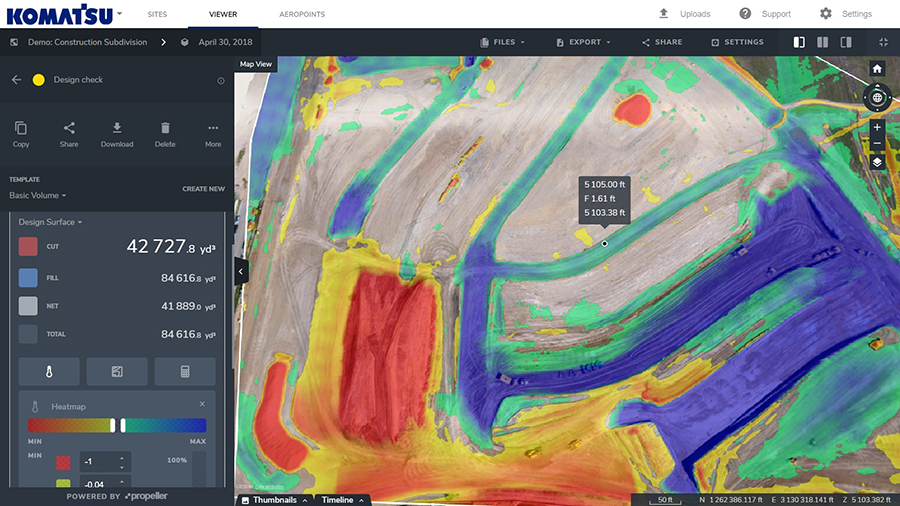
Komatsu America Corp. and Propeller Aero Inc. are partnering to boost the efficiency of construction job sites using drone-powered mapping and analytics software.
With drones becoming an increasingly common worksite tool, Komatsu has identified aerial mapping and analytics as a key component of its Smart Construction initiative — a range of integrated hardware and software products designed to offer an end-to-end workflow for each phase of construction.
Komatsu America Corp. spent several years testing various commercial drone mapping and analytics products in North America. In Propeller, Komatsu found a robust product suited to meet the needs of modern construction operations. Propeller expertly balances ease-of-use with survey accuracy and reliability, Komatsu said.
Propeller’s processing machinery crunches thousands of drone images in hours, and delivers the results as a cloud-based 3D model to the user’s desktop or tablet. From there, powerful collaboration and analysis tools let users perform height, volume and slope calculations, and measure change over time to confirm that a project is on track, the companies said.
(Image: PRNewsfoto/Propeller Aero)
Propeller’s technology platform supports multiple coordinate systems, including local site calibrations. This allows personnel to capture up-to-date survey data expressed in the specific geospatial coordinates they already use on that job site. Local grid support is crucial for ensuring drone-captured maps and models match up with plans and previous surveys.
“A Komatsu Smart Construction jobsite by definition is technology enhanced and production optimized,” said Jason Anetsberger, senior product manager at Komatsu America Corp. “Adding Propeller Aero as one of our key partners gives our North American distributors and customers exceptional capabilities to achieve this standard in the aerial mapping space. Propeller combines simple, yet powerful analysis tools with accurate and fast site visualization.”
“Worksites are starting to see the real business value of accurate, up-to-date drone data,” said John Frost, vice president of business development at Propeller. “We drive that value through workflows that enable everyone to understand who’s moved what material, how much, and where. It’s all about empowering worksites with the information they need to make data-driven decisions to reduce costs, ensure quality, and use resources efficiently. Now more than ever, stakeholders on site, or in the head office miles away, can stay up-to-date with exactly what’s happening on the ground.”
“Anyone can fly a drone — it’s what you do with the data that makes an impression,” said Chris Faulhaber, smart construction business manager at Komatsu Equipment Co. “Propeller provides fast, accurate data processing via a web platform that is unparalleled. The platform is easy to use, facilitates healthy collaboration and delivers vital information quickly — so everyone can work together better and faster than anticipated.”
Growing awareness of the vulnerabilities of GNSS signals — weak, unencrypted and easily jammed or spoofed — have made GNSS less important to steering the driverless vehicle. What’s up with that?
Extensive visual map databases are being created that, when coupled with cameras, radars and lidars on the vehicle and processed by artificial intelligence (AI) algorithms, enable the driverless car to be steered much the way humans drive. Pattern recognition processing in the vehicle allows it to “read” street signs and recognize landmarks, registering its position on the map.
This is the way a person drives in his or her home town, where they always know their orientation and don’t need GNSS. The AI processing “brain,” with access to huge map databases, either through local storage or a network connection, will always be in its familiar home environment: continuously knowing its own position and properly oriented for navigation.
So, will GNSS become unnecessary in the car of the future? Probably not.
First, no one method of navigation is foolproof, and today, GNSS is our primary method of navigating our cars. It is a cost-effective, accurate way of determining position in real time, and with the integration of inertial navigation sensors to handle cases when GNSS is intermittently unavailable, it is improving.
Second, it is not just the car itself that needs to know its location for navigation, but also others outside the car. Ride-sharing apps like Uber and Lyft, car-sharing, usage-based insurance apps, dynamic toll charging, and parking apps all depend on knowing where the car is at all times. GNSS offers sufficient accuracy for all these apps by providing location coordinates. Therefore, a GNSS receiver will most likely remain in the car.
The case for jamming and spoofing
Recall, however, that one of the weaknesses of GNSS is its open, unencrypted format. It is becoming increasingly easier to spoof these signals. Car-sharing, usage-based insurance and dynamic toll charging apps all create a monetary incentive for fraud that can be implemented with a spoofer. For example, a car in a car-sharing network can report a fake position indicating that it is safely parked in a secure area — while in reality, a thief is busy driving it away.
(Image: Orolia)
Let’s assume that all wireless connections to and from the car are secure. This is a reasonable assumption, although recently there have been demonstrations of carjacking via unsecure remote links. Standard SSL encryption, similar to what is used to enter credit card information on the internet, works well here. We have both the awareness and the technology now to prevent such carjackings from ever reoccurring.
However, even if communication links are secure, a GNSS spoofer in the car can fool the GNSS receiver into reporting a fake “safe” position right as it is being stolen. The same is true for insurance or toll apps. And the fraud does not have to be sophisticated. A simple, low-cost jammer can deny proper position just long enough to skirt payment. A secure location method is needed.
Other signals for localization
What would an ideal signal for localizing a driverless car look like?
It needs to be much stronger than GNSS so it is not easily jammed.
It needs to be encrypted so it cannot be spoofed.
It must be ubiquitous, available worldwide.
It must be reliable and robust — with 99.999% availability or better.
It must be practical and priced for the mass-market automotive application.
Though accuracy is always important, the signal used for localization does not have to be as accurate as GNSS is today. Accuracy to 10s of meters is sufficient for all these applications needing fraud protection since it would not be used for steering the car, but rather, only localization. It can also be used in tandem with GNSS to authenticate a reported position when a GNSS signal is available.
Such a signal is available today, worldwide: STL (Satellite Time and Location). Carried on the Iridium satellites, it is a special purpose signal that is more than 30 dB stronger than GNSS and encrypted for anti-spoof protection. Decoding of this signal is available via a subscription model to users.
Here’s how it would work using a car-sharing example. A group of people subscribe to a car-sharing service that provides X number of cars to serve Y number of people, where X is less than Y. The service optimally schedules people when and where a car will be available. The service provider needs to know the whereabouts of the cars at all times to maximize utilization of the fleet, so every car has a GNSS receiver in it.
But to ensure the authenticity of these reports, they also have a secure localization receiver. This receiver is assigned a unique ID that is authorized to decode the encrypted signal. (Eventually, we expect this receiver and GNSS to converge into one device much the way multi-GNSS receivers operate today).
If a position report does not agree with the authentic localization report, the fleet manager can act to recover the car immediately. Insurance providers who cover secure localization-equipped cars would also give preferential rates as an anti-theft device.
(Image: Pavel Vinnik/Shutterstock.com)
Could PRS do it?
The new Public Regulated Service (PRS) from Galileo is encrypted and could provide a similar level of authentication protection, if made available. However, it is still a weak GNSS signal that can easily be jammed. Of course, any signal can be jammed, even one that is a thousand times stronger than GNSS.
However, given the robust nature of a very strong signal, the managing system that is monitoring the cars — the insurance, toll or car-sharing system, for example — can alarm upon the loss of positioning information. Such alarms on a GNSS-only car would be frequent and often erroneous due to simple fades, yielding so many false alarms that it would render the monitoring system useless. But a loss of both the strong localization signal and GNSS would likely be considered suspicious and result in a valid alarm.
GNSS navigation is truly one of the great advances of the modern era, giving us precise time and location for any place in the world. Its two major weaknesses — that it is easy to jam and spoof — can be overcome by augmenting it with other stronger encrypted signals, such as STL, providing robust jam-resistance and positive authentication.