A roundup of recent products in the GNSS and inertial positioning industry from the January 2024 issue of GPS World magazine.
SURVEYING & MAPPING

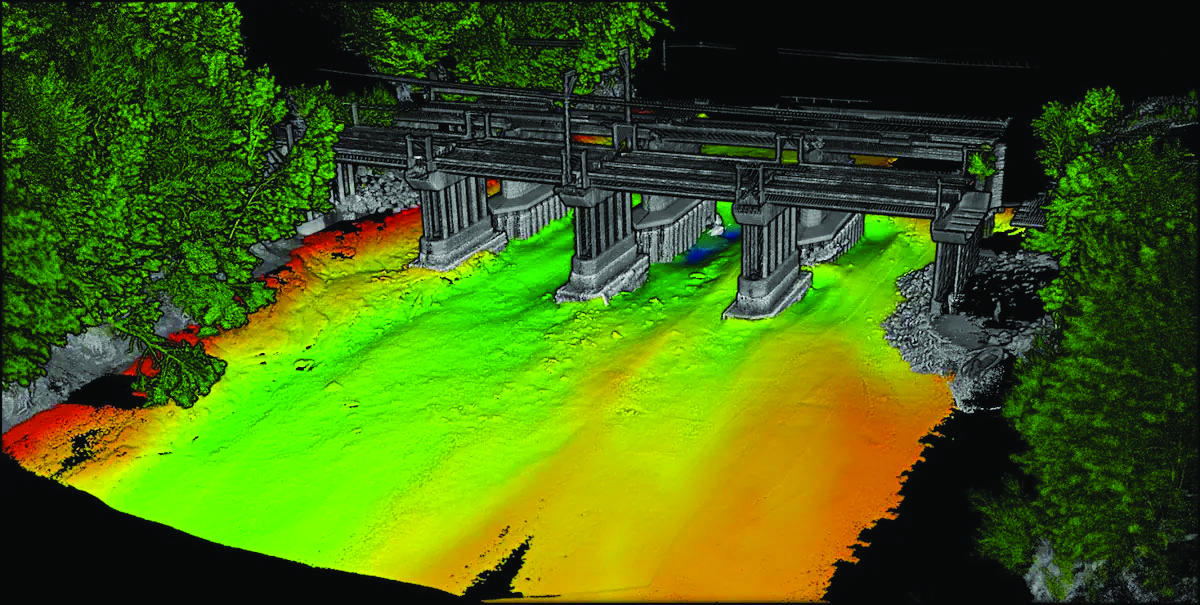
Laser Scanning Measurement System
Compatible with specialized kits
The LS300 3D laser scanning measurement system utilizes simultaneous localization and mapping (SLAM) technology and advanced real-time mapping techniques. The LS300 3D operates autonomously, independent of GNSS positioning, making it ideal for harsh conditions in both indoor and outdoor environments.
LS300 includes a 120-meter working range and a sampling rate of 0.32 million points per second. Its point cloud accuracy is designed to perform in low reflectivity extended-range mode. The system is compatible with specialized kits, including the handheld form, back kit, car mount, and UAV kit.
By using data processing software specifically designed and developed for the LS series, users can handle large volumes of point cloud data and simplify complex tasks, including point cloud denoising, point cloud splicing, shadow rendering, coordinate transformation, automatic horizontal plane fitting, automatic point cloud data report generation, forward photography, and point cloud encapsulation.
During data post-processing, users can input absolute coordinates of control points, allowing these control points to adjust the data and improve scanning data accuracy. The LS300 incorporates a redundant battery design with two hot-swappable batteries, designed to prolong operation without frequent charging or interruptions.
ComNav Technology, comnavtech.com

Anti-jamming receiver
A jamming protector for legacy receivers
The KV-AJ3 tri-band anti-jamming receiver combines a digital antenna control unit (DACU) and a GNSS receiver. KV-AJ3 can be used as a jamming protector for legacy receivers or as a stand-alone GNSS receiver solution.
The tri-band solution decreases interferences from up to three directions in three frequency bands, including S-band. This approach is designed to provide significantly higher protection against interference compared to single-frequency devices.
The receiver has a digital port for navigation data output. Jamming-free RF signals can also be delivered to external non-protected GNSS receivers to obtain position, velocity, and time.
KV-AJ3 contains a MEMS inertial sensor, which allows for GNSS-aided INS solutions where coordinates and attitude angles are required.
Kosminis Vytis, kosminis-vytis.lt

Lidar sensor
Designed for high-speed airborne missions
The VUX-180-24 offers a field of view of 75º and a pulse repetition rate of up to 2.4 MHz. These features – in combination with an increased scan speed of up to 800 lines per second – which makes the VUX-180-24 suitable for high-speed surveying missions and applications where an optimal line and point distribution is required.
Typical applications include mapping and monitoring of critical infrastructure such as power lines, railway tracks, pipelines, and runways. The VUX-180-24 provides mechanical and electrical interfaces for IMU/GNSS integration and up to five external cameras.
This sensor can be coupled with RIEGL’s VUX-120, VU-160, and VUX-240 series UAVs. The system is available as a stand-alone sensor or in various fully integrated laser scanning system configurations with IMU/GNSS systems and optional cameras.
RIEGL, riegl.com
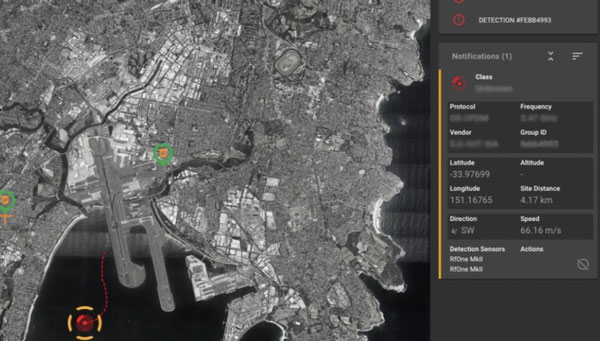
UAV detection technology
A 3D data fusion engine for complex environments
SensorFusionAI (SFAI) is a sensor-agnostic, 3D data fusion engine for complex environments. It accommodates all common UAV detection modalities, including radiofrequency, radar, acoustics, and cameras.
SFAI allows third-party C2 manufacturers to integrate SFAI into its C2 systems. This integration can be achieved through a subscription-based software-as-a-service (SaaS) model, enhancing system performance.
Key features of SFAI include behavior analysis to track an object to determine classification and predict trajectory; threat assessment that determines threat level based on a range of data types; and an edge processing device called SmartHub for reduced network load and high scalability.
DroneShield, droneshield.com
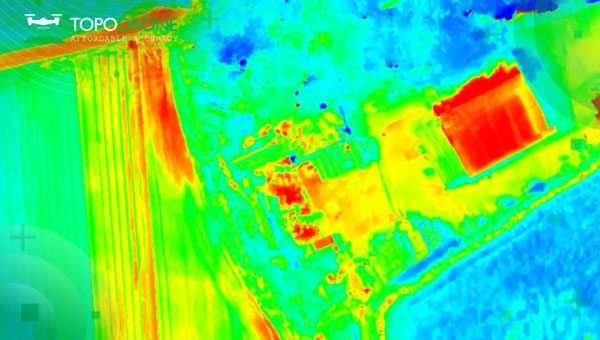
Thermal mapping solution
Designed for UAVs
The PT61 camera is a thermal mapping solution for UAVs. The camera system provides detailed thermal orthomosaic maps and accurate 3D models. Developed in partnership with Agrowing, the PT61 is a versatile tool designed for multispectral data collection in renewable energy and other domains.
The PT61 combines a 61-megapixel camera with integrated thermal imaging capability. It can also switch between RGB and multispectral modes, which aims to increase its versatility and address the increasing need for comprehensive data acquisition in various industrial and environmental applications.
Integrated with Agrowing’s multispectral lenses, the camera offers detail across 10 spectral bands and an infrared band, making it ideal for solar plant inspection and dam management.
The enhanced Topodrone post-processing software complements the hardware by streamlining remote sensing tasks, ensuring surveyors and researchers can achieve high levels of efficiency.
Topodrone, topodrone.com
OEM
Dual-band GNSS receiver
Achieves 50cm position accuracy without correction data
eRideOPUS 9 is a dual-band GNSS receiver chip that achieves 50cm position accuracy without correction data. eRideOPUS 9 is designed to provide absolute position information and can be used as a reference for lane identification, which is essential for services such as autonomous driving. It also serves as a reference for determining the final self-position through cameras, lidar, and HD maps.
The eRideOPUS 9 supports all navigation satellite systems currently in operation, including GPS, GLONASS, Galileo, BeiDou, QZSS, and NavIC. It can also receive L1 and L5 signals. The L5 band signals are transmitted at a chipping rate 10 times higher than L1 signals, which improves positioning accuracy in environments where radio waves are reflected or diffracted by structures, such as in urban areas — a phenomenon known as multipath.
A dual-band GNSS module incorporating eRideOPUS 9 is being jointly developed with Alps Alpine Co. and is scheduled for future release as the UMSZ6 series.
Furuno Electric Co., Furunousa.com
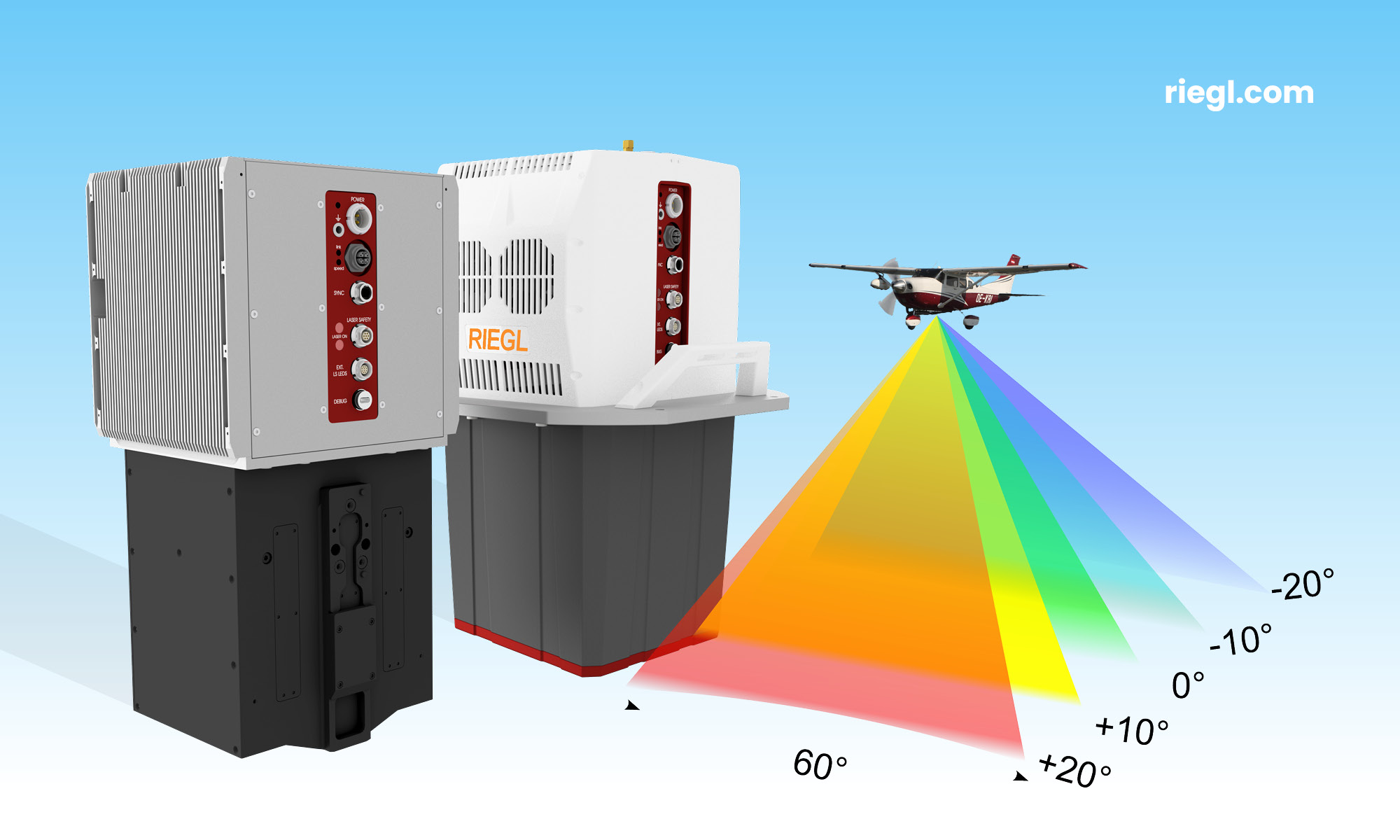
Lidar scanning module
Designed for OEM integration
The VQ-680 compact airborne lidar scanner OEM is designed to be integrated with large-format cameras or other sensors in complex hybrid system solutions.
It can be mounted inside a camera system connected to the IMU/GNSS system and various camera modules through a sturdy mechanical interface. The VQ-680 has laser pulse repetition rates of up to 2.4 MHz and 2 million measurements per second.
The VQ-680 is ideal for large-scale applications in urban mapping, forestry, and power line surveying. With a field view of 60º and RIEGL’s nadir/forward/backward (NFB) scanning, the system offers five scan directions up to ± 20º.
RIEGL, riegl.com
INS
A product for avionic applications
The ADC inertial navigation system (INS) is designed to calculate and provide air data parameters, including altitude, air speed, air density, outside air temperature, and windspeed for avionic applications.
ADC’s compact form simplifies integration into existing UAV systems with strict size and weight requirements. The INS calculates the air data parameters using information received from the integrated pitot and static pressure sensors, along with an outside air temperature probe.
This compact device consumes less than one watt of power. It is designed for demanding environments, has an IP67 rating, and integrates total and static pressure sensors to calculate indicated airspeed accurately. ADC supports aiding data from external GNSS receivers and ambient air data, enhancing its precision in a variety of flight conditions.
Inertial Labs, inertiallabs.com

Two tactical-grade IMU
With L5 capabilities
The VN-210-S GNSS/INS combines a tactical-grade inertial measurement unit (IMU) comprised of a 3-axis gyroscope, accelerometer, and magnetometer with a triple-frequency GNSS receiver. The integrated 448-channel GNSS receiver from Septentrio adds several capabilities, including L5 frequencies, moving baseline real-time kinematics with centimeter-level accuracy, support for Galileo OSNMA, and robust interference mitigation.
These capabilities and high-quality hardware offer improved positioning performance in radio frequency-congested and GNSS-denied environments.
The VN-310-S dual GNSS/INS leverages VectorNav’s tactical-grade IMU and integrates two 448-channel GNSS receivers to enable GNSS-compassing for accurate heading estimations in stationary and low-dynamic operations. The VN-310-S also gains support for OSNMA and robust interference mitigation, offering reliable position data across a variety of applications and environments.
The VN-210-S and VN-310-S are packaged in a precision-milled, anodized aluminum enclosure designed to MIL standards and are IP68-rated. For ultra-low SWaP applications, VectorNav has introduced L5 capabilities to the VN-210E (embedded) when using an externally integrated L5-band GNSS receiver.
VectorNav, vectornav.com

Real-time INS
Used in large fleets
The Atlas inertial navigation system (INS) is designed for autonomous vehicles, mapping, and other applications. Atlas provides users with ground-truth level accuracy in real-time, which can streamline engineering workflows, significantly reduce project costs, and improve operational efficiency.
Atlas is designed to be used in large fleets. It integrates a highly accurate, low-cost GNSS receiver and IMU with the Polaris RTK corrections network and sensor fusion algorithms. The company aims to make it easier for businesses to equip their entire autonomous fleets with high-accuracy INS.
The system features a user-friendly interface, on-device data storage, and both ethernet and Wi-Fi connectivity. Field engineers can easily configure and operate Atlas using smartphones, tablets, and in-car displays.
Atlas can be used in a variety of sectors, including autonomous vehicles, robotics, mapping, and photogrammetry. Its real-time capabilities and affordability can enhance the widespread deployment of ground truth-level location in fleet operations.
Point One Navigation, pointonenav.com
UAV
USV
For autonomous bathymetric surveys
The Apache 3 Pro is an advanced compact hydrographic unmanned surface vehicle (USV) designed for autonomous bathymetric surveys in shallow waters. With its lightweight carbon fiber hull, IP67 rating, and semi-recessed motor, the Apache 3 Pro offers exceptional durability and maneuverability.
The Apache 3 Pro uses CHCNAV’s proprietary GNSS RTK + inertial navigation sensor to provide consistent, high-precision positioning and heading data even when navigating under bridges or in areas with obstructed satellite signals. The built-in CHCNAV D270 echosounder enables reliable depth measurement from 0.2 m to 40 m.
The USV is equipped with a millimeter-wave radar system that detects obstacles within a 110° field of view. When an obstacle is encountered, the USV autonomously charts a new course to safely navigate around it. The vessel uses both 4G and 2.4GHz networks to facilitate effective data transfer.
Even with a fully integrated payload, the USV can be easily deployed and controlled by a single operator in a variety of environmental conditions.
The Apache 3 Pro ensures reliable communications through its integrated SIM and network bridge with automatic switching. It also features seamless cloud-based remote monitoring that offers real-time status updates to enhance control and security. Its semi-recessed brushless internal rotor motors minimize drafts, which can improve the USV’s maneuverability in varying water depths.
CHC Navigation, chcnav.com

Anti-jamming receiver
Provides stable navigation in three frequency bands
KV-AJ3-A provides a stable navigation signal in three frequency bands, including S-band, even in the presence of jamming and other harsh conditions. The technology is MIL-STD compliant and meets the EMI/EMC requirements for avionics.
The direction of interfering signals is determined using a phased array antenna, which can then remove jamming signals from up to three directions. The original signal is either restored and delivered to external GNSS receivers or processed by the internal receiver to obtain position data.
The key components of this anti-jamming device are based on custom ASICs that allow users to achieve high jamming suppression and SWaP. KV-AJ3-A can be used for fixed installations and land, sea, and air platforms, including UAVs.
Kosminis Vytis, kosminis-vytis.lt
Development kit
With anti-jamming and anti-spoofing capabilities
This eight-channel, CRPA, anti-jamming development kit is a set of instruments designed to help users add anti-jamming and anti-spoofing capabilities to their receivers.
The main development tool is NT1069x8_FMC — an eight-channel receiver board. The eight coherent channels are based on NT1069, the RF application-specific integrated circuit (ASIC) that supports a high dynamic range of input signals.
Each channel performs amplification, down-conversion of GNSS signal to intermediate frequency (IF) and subsequent filtering and digitization by 14-bit ADC at 100 MSPS.
The board is compatible with GPS, GLONASS, Galileo, BeiDou, NavIC, and QZSS signals in the L1, L2, L3, L5 and S bands. Each RF channel has an individual RF input with the option to feed power to an active antenna.
The board also has an embedded GNSS receiver and an up-converter, or modulator, which can provide connection to an external GNSS receiver.
Kosminis Vytis, kosminis-vytis.lt