The European Space Agency (ESA) and the European Commission’s Joint Research Centre (JRC) are collaborating to host the 15th edition of the International Summer School on Global Navigation Satellite Systems (GNSS).
The course is scheduled to take place in Novo Mesto, Slovenia, from July 15 to 26, 2024.
The summer school invites graduate students, Ph.D. candidates, postdoctoral researchers, engineers and academics from both the industry and agencies to attend. The wide range of attendees offers a dynamic environment conducive to learning and networking.
The deadline for registration is June 15. Those who register by April 15 will be offered reduced fees. Additionally, the ESA Education Office is offering up to four scholarships.
The comprehensive curriculum of the summer school encompasses all aspects of GNSS, starting from the fundamental principles of satellite navigation to recent advancements in positioning, navigation and timing services.
Participants will have the opportunity to learn from world-leading experts in the field, including ESA Director of Navigation, Javier Benedicto, former ESA Director General, Jean-Jacques Dordain and former ESA Director of Navigation, Paul Verhoef.
The European Union Agency for the Space Program (EUSPA) has published a technical document detailing the main characteristics of the new Galileo Emergency Warning Satellite Service (EWSS).
According to the document, Galileo satellites will transmit emergency warning messages directly to Galileo-enabled smartphones and other navigation devices. The satellites will offer information related to the hazard, such as type, severity, expected onset and duration, as well as the location of the affected area and instructions to follow. The alert content will be generated by national authorities and transmitted to Galileo for broadcast.
“With this new document, some of our key stakeholders can already start to work with this new service,” said Fiametta Diani, head of market, downstream and innovation at EUSPA. “Civil protection authorities in the member states can start to prepare for how they will manage the alert messages they will send via Galileo. The same goes for the receiver and chipset communities, who will have to process this message.”
In 2023, EUSPA began testing the EWSS in different locations in Europe. “We have run trials in Toulouse and in Germany, specifically with a simulated explosion,” Diani said, “like what you might see with an industrial accident. We have also tested a tsunami alert in Cyprus.” The Union is developing the tsunami application together with Japanese partners. EUSPA has also finished flood testing in Belgium and Luxembourg.
EUSPA plans to launch the new EWSS in 2025, Diani said. “As for the receivers, we are working to get our chipset and receiver industry ready,” she said, adding that this process is also supported by the Fundamental Elements program.
Fundamental Elements is an EU funding mechanism that supports the research and development of European GNSS-enabled chipsets, receivers and antennas. The projects are part of the overall strategy for European GNSS market uptake, said EUSPA.
The member states and the correlating national civil protection authorities will initiate warnings, according to Ignacio Alcantarilla Medina of the European Commission.
“[Authorities] will send a message to the Galileo system, and then Galileo will transmit that message through its satellite signals to the users,” he said.
According to EUSPA, the service is designed to be used worldwide to serve as a backup to the already existing mobile network warning systems.
BAE Systems has been awarded a contract by Boeing to enhance the U.S. Navy’s MQ-25 unmanned aerial refueling system with a modernized vehicle management system computer (VMSC). This upgrade aims to enhance the computing power of the MQ-25 and address both obsolescence issues and overall aircraft performance for future operations.
The MQ-25 — recognized as the Navy’s inaugural operational carrier-based UAV — is primarily tasked with aerial refueling capabilities designed to alleviate the burden on F/A-18 aircraft and improve the fleet’s operational flexibility.
The next-generation VMSC developed by BAE Systems is key to controlling the MQ-25’s flight surfaces and managing the vehicle. The upgrade is designed to enhance the MQ-25’s functionality and make its critical missions more efficient by consolidating hardware components into a single computer system.
The VMSC upgrade will incorporate quad-core processors, which augment the system’s computing power without increasing its size, weight, or power consumption. The selection of a multi-core processor, already qualified on another U.S. military platform, aims to mitigate cost, schedule, and integration risks associated with the MQ-25 program.
By replacing multiple onboard computers with a single VMSC, the upgrade is expected to improve aircraft reliability and decrease the total cost of ownership for the Navy. Additionally, the VMSC is designed to support the expansion of the MQ-25’s mission set, potentially including intelligence, surveillance and reconnaissance (ISR) capabilities, and to establish a foundation for future carrier-based unmanned systems through the implementation of manned-unmanned teaming (MUM-T) operational concepts.
The VMSC enhancement work is conducted at BAE Systems’ engineering and manufacturing facility in Endicott, New York, underscoring the company’s commitment to advancing the U.S. Navy’s unmanned aerial capabilities.
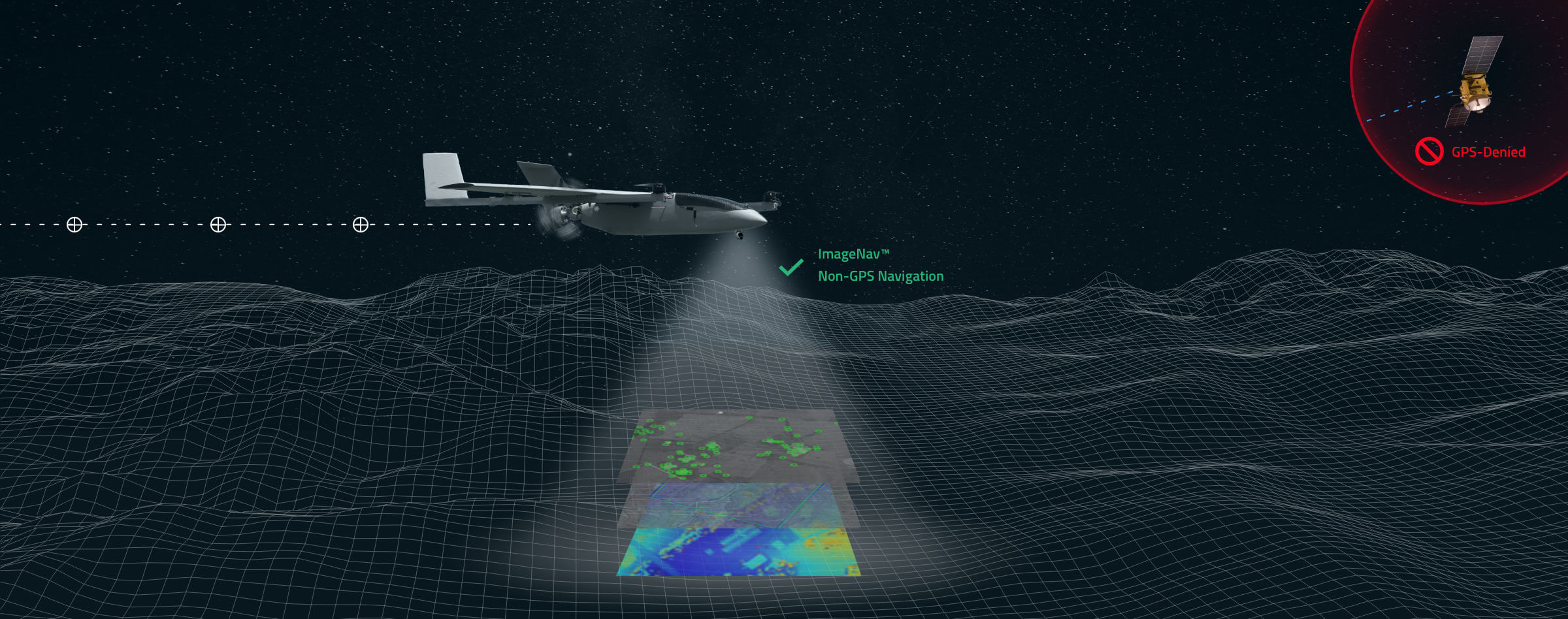
Scientific Systems has released upgrades for ImageNav, an image-based navigation software designed for GPS-denied or compromised environments.
With more than a decade of development, ImageNav offers a robust alternative to traditional GPS navigation for military operations, particularly in contested environments where jamming poses a threat to GPS reliability.
The demand for such technology has become increasingly critical considering enhancements to electronic warfare capabilities, with instances of GPS signal disruption impacting military assets. ImageNav is designed to address GPS vulnerability by offering precise navigation for a wide range of systems, including weapons, aircraft and uncrewed aircraft systems (UAS), without reliance on GPS signals.
ImageNav uses an onboard electro-optical (EO) or infrared (IR) digital camera and can employ three algorithms to analyze captured images and correlate them with stored terrain and image references. This process allows both absolute and relative navigation position updates. The technology can be integrated into air platforms as a software upgrade or as part of a self-contained hardware payload, minimizing size, weight and power (SWaP) requirements.
Scientific Systems is actively pursuing the integration of ImageNav onto GPS-guided munitions and UAS to operate in environments where GPS access is denied. Recent testing has demonstrated the technology’s capability to navigate without GPS and hit targets within required performance parameters.
The Global Earth Observation Decentralized Network (GEODNET) Foundation — the organization governing the blockchain-based global navigation network GEODNET — has completed a $3.5 million seed funding round. The round was led by North Island Ventures, with participation from Modular Capital, Road Capital, Tangent, Reverie, and select angels, who join existing GEODNET backers Borderless, IoTeX and JDI Ventures.
The GEODNET Foundation is building a Global Navigation Satellite System (GNSS) reference network for positioning based on real-time kinematics (RTK). Standard GPS is typically off by two meters; however, devices connected to GEODNET’s global RTK network are designed to achieve instant accuracy within 1 cm to 2 cm. Many internet-of-things (IoT) and autonomous applications, such as UAVs, smart mowers and advanced driver assistance systems (ADAS), have shifted to RTK in place of standard GPS positioning, the company said.
GEODNET is a community-based decentralized physical infrastructure network (DePIN). Anyone can contribute to the network by installing and operating a reference station, known as a satellite miner. Satellite miners are designed to deliver precise RTK correction data to devices equipped with GNSS receivers in a range of approximately 20 km to 40 km. By building and participating in the network, satellite mining operators earn GEOD tokens.
GEODNET has more than 4,000 registered reference stations in more than 2,500 cities across 120 countries. GEODNET aims to provide robust precision navigation systems to a variety of industries, including self-driving cars, agriculture, consumer robots, and more.
In my November 2023 GPS World newsletter, I highlighted the announcement made by the National Geodetic Survey (NGS) of the recipients of the NOAA FY 23 Geospatial Modeling Competition Awards. The grantees’ proposals include developing models to address what NGS denotes as the Intra-Frame Deformation Model (IFDM). The primary objectives of these projects are to modernize geodetic tools and models, as well as to develop a geodetic workforce for the future. A significant improvement in the new, modernized National Spatial Reference System (NSRS) is the time-dependent component being incorporated in the computation of reference epoch coordinates (RECs). That said, developing models that accurately capture the time-dependent component is extremely important to providing reliable, consistent, and accurate RECs. My February 2024 newsletter highlighted NGS’s grant to The Ohio State University for developing a fully kinematic reference frame for the Continental United States and Canada. Similar to the OSU project, a goal of the Scripps Institution of Oceanography (SIO) project is to provide an accurate IFDM, which will provide reliable, consistent and accurate RECs. On Jan. 10, 2024, Yehuda Bock, Ph.D., gave a presentation about this at the general membership meeting of the American Association for Geodetic Surveying (AAGS). His presentation can be downloaded from the AAGS’s website: https://aagsmo.org/.
Summary of the SIO Geospatial Award. (Image: NGS website)
Bock is director of the California Spatial Reference Center (CSRC), which is responsible for “establishing and maintaining an accurate state-of-the-art network of GPS control stations for a reliable spatial reference system in California.” I highlighted the CSRC in my June 2023 GPS World Newsletter.
Yehuda’s proposal included the following three activities:
Create a formal Geodesy Program at SIO to address the nationwide deficiency of geodesists. Expand current geophysics curriculum – funding for five graduate students.
Develop an IFDM to supplement the NSRS for users in regions with significant ground motions, using GNSS and InSAR/GNSS displacement fields (funded by NASA projects) and underlying geophysical models. CSRC will exercise the IFDM through its community of public, private and academic users of precise spatial referencing in our challenging region of secular and transient crustal movements.
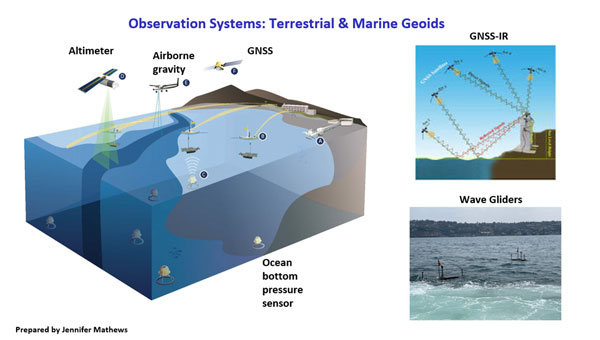
Investigate a unified vertical reference frame, including a marine geoid optimized to be consistent with the full spectrum of observations from modern gravimetric geoids (e.g., GRAV-D, ICGEM), remotely sensed observations (e.g., SWOT, ICESat-2), in situ ocean observations and assimilating ocean models and the TRF.
Yehuda’s project includes creating a formal geodesy program at SIO that will help to address the geodesy crisis. Anyone keeping up with my columns knows that I have been highlighting the geodesy crisis and programs that advance the science of geodesy (July 2020, November 2022, and December 2022).
Yehuda showed a slide that highlighted “What Geodesy Can Tell Us About Earth.” Looking at the slide, geodesists are needed in the field of climatology, meteorology, hydrology, geology, volcanology, oceanography, and glaciology, as well as surveying, mapping, and navigation. All these disciplines study Earth’s dynamic processes and involve geodesy.
From Yehuda Bock Ph.D.’s presentation to the AAGS General Membership Meeting. (Image: AAGS website)
The images “Geodesy Curriculum at SIO (PhD, MSc)”, “Geodesy Courses – 1” and “Geodesy Courses – 2” provide information about the Geodesy Program as SIO.
From Yehuda Bock, Ph.D.’s Presentation to the AAGS General Membership Meeting. (Image: AAGS website)
Notice that some of the courses focus on topics that are important to real world applications. For example, GNSS precise point positioning applications to seismotectonics, GNSS signal propagation applications to atmospheric remote sensing and GNSS reflection: soil moisture and sea level and the vertical datum.
From Dr. Yehuda Bock Ph.D.’s presentation to the AAGS General Membership Meeting. (Image: AAGS website)FromYehuda Bock, Ph.D.’s presentation to the AAGS General Membership Meeting. (Image: AAGS website)
In addition to the graduate-level courses, they are proposing an undergraduate course titled Geodesy and Geospatial Information. The purpose of the course is to provide students with the skills in geospatial systems that will provide opportunities for eventual employment in the public and private sectors.
Proposed Undergraduate Course
Title: Geodesy and Geospatial Information
Course justification and content objectives: Geodesy is the study of Earth’s size (geometry), shape (gravity field) and deformations (e.g., plate tectonic motions, subsidence). It provides access to a well-defined spatial reference system for precise geospatial information (latitude, longitude, height, elevation with respect to sea level) used for positioning, navigation, surveying and mapping. Geodesy is also an important discipline within the earth, atmospheric and oceanographic sciences, using observations of GPS and other satellite navigation constellations, remote sensing platforms (satellite and drone), and various terrestrial sensors. It is a data- and analysis-intensive discipline increasingly requiring modern data science methods. This introductory course will provide students with a solid background in geospatial systems for eventual employment in the public and private sectors. The course will also serve as a pipeline to the geodesy track at SIO/Earth Sciences and to other academic institutions and to alleviate the nationwide deficiency of geodesists. The objective is to provide basic knowledge of geodetic concepts for Earth and data scientists and the underlying geodetic framework for precise spatial information.
Learning objectives:
Acquire basis concepts of geodetic science.
Provide overview of geodetic instrumentation and observations.
Develop elementary skills in geodetic data analysis.
Explore existing geodetic infrastructure and data repositories.
Experience hands on visualization and manipulation of geospatial information.
Understand the underlying geodetic framework for precise spatial information systems.
Provide example of data science applications in solving geodetic problems.
Preferred background: statistics, linear algebra, Matlab/Python
In my opinion, universities should provide a general elective course for undergraduate students that provides an introduction in how geodesy influences your daily routines. For example, how does my phone know where I am and how does it know the best route I should take to get to my destination?
How Does My Phone Know Where I Am? (Image: Dave Zilkoski)
The second task in the SIO proposal is to develop an IFDM. The concept of an IFDM is part of NGS’ modernized, NSRS. Several of my previous My July 2023GPS World newsletter highlighted a presentation by Yehuda discussing a kinematic datum that uses an intra-frame velocity model to estimate positions at any time with respect to a reference frame and epoch.
As I mentioned in my July 2023 newsletter, California’s geodetic network is significantly affected by crustal movement. To help address this issue, the CSRS updated the NAD 83 coordinates, it is denoted as CSRS epoch 2017.5 (NAD 83). Part of the implementation of the CSRC epoch 2017.50 (NAD 83) was to have the new epoch-date coordinates transmitted with RTCM 3.0 data streams. This is something that other RTN operators from around the nation will have to do after NGS publishes the NSRS coordinates. The CSRS is a model from which others can learn.
During his presentation to AAGS, Yehuda highlighted his methodology of integrating InSAR and GNSS to develop an IFDM that provides for higher spatial resolution to improve the model between GNSS stations.
The boxes titled “SCIP Dynamic Datum Utility” and “Output from SCIP Utility” provide an example of an input and output of the utility, and the box titled InSAR/GNSS Integration for Higher Spatial Resolution” is a conceptual diagram of the concept.
Not only has this abbreviation been spelled out before, but here the full phrase appears three times, in three consecutive sentences.
SCIP Dynamic Datum Utility. (Image: SOPAC website)Output from SCIP Utility. (Image: (SOPAC Website)From Yehuda Bock Ph.D.’s Presentation to the AAGS General Membership Meeting (Image: AAGS website)
The image provides an example of the concept in the San Joaquin Valley, California.
InSAR/GNSS Integration Example.
The following statement is in the note section of the slide:
“Area of subsidence in San Joaquin Valley. Our weekly displacement time series at GNSS station P056 shows significant changes in subsidence rate over the period 2006 to 2022, for a total of 3.3 feet that reflects periods of drought and increased groundwater use. On the upper right is the InSAR time series at that location for a shorter period of time.” This shows the potential of using InSAR to improve the IFDM in areas of sparse CORS.
The third item in the proposal is to “Investigate a unified vertical reference frame, including a marine geoid optimized to be consistent with the full spectrum of observations from modern gravimetric geoids (e.g., GRAV-D, ICGEM), remotely-sensed observations (e.g., SWOT, ICESat-2), in situ ocean observations and assimilating ocean models, and the TRF.”
The images below provide a list of the reference surfaces involved in unifying the vertical reference frames and the observing systems involved in the project. Understanding the geoid at the land-sea interchange is important to estimating accurate GNSS-derived orthometric heights along the coast as well as in the oceans. My August 2021 newsletter highlighted the concept of establishing an International Height Reference System (IHRS) so that all countries could provide physical heights across their boundaries and over the oceans. This project would support that international activity.
From Yehuda Bock Ph.D.’s Presentation to the AAGS General Membership Meeting. (Image: AAGS website)From Yehuda Bock Ph.D.’s Presentation to the AAGS General Membership Meeting. (Image: AAGS website)
This newsletter and my previous GPS World newsletter highlighted two of the grantees, \SIO and OSU, which included developing models to address what NGS denotes as the IFDM.
The SIO program includes creating a formal geodesy program at SIO that will help to address the geodesy crisis. In addition to the graduate level courses, they are proposing an undergraduate course that will provide students with the skills in geospatial systems that will provide opportunities for eventual employment in the public and private sectors. My next newsletter will address another NGS geospatial modeling grant awardee – Oregon State University’s proposal.
Iridium Communications, a satellite network operator, will acquire Satelles for $115 million. Satelles is a provider of secure satellite-based time and location services that complement and protect GPS and other GNSS-reliant systems.
While Satelles primarily focuses on providing its satellite time and location (STL) services for digital infrastructure companies, there are potential applications for aviation, the company said. Satelles offers smaller form factor devices that can be integrated with data processing and storage servers to provide critical positioning, navigation and timing (PNT) data.
According to Iridium, the STL service uses the stronger broadcast paging channels of the Iridium satellite constellation to deliver precise timing information. This aims to provide global, secure time and location signals that are more powerful than GNSS constellations, the company continued. The service is resilient to regional GNSS outages, works inside buildings and is being used to secure digital infrastructure for financial markets, governments and major corporations.
The company is now working to reduce the size and cost barriers to improve integration with autonomous systems, consumer devices, vehicles and traditional markets such as aviation, maritime and land mobile. STL can help mitigate GNSS jamming and spoofing, with dedicated STL receivers incorporated into aircraft avionics.
“The most immediate application would be in aviation/Federal Aviation Administration (FAA) ground infrastructure to support PNT resilience in their networks,” Iridium CEO Matt Desch told AIN. “[In the] longer term, there would be an opportunity for avionics providers to build STL into their avionics to protect the integrity of the GPS signals their boxes use and provide a way to tell if GPS signals were compromised or spoofed. We don’t think we’ll be an alternative to GPS or other GNSS applications—only a backup to constantly check signal integrity.”
A long-standing investor in Satelles, Iridium had an ownership stake of 20% from three previous investments in the company. Iridium expects to complete the acquisition in the next few weeks.
The European Organization for the Safety of Air Navigation (EuroControl) has awarded GMV a contract for the evolution of AUGUR, a free service for pilots, airspace users and air navigation service providers.
AUGUR is a web-based service that makes it possible to predict the availability of the GPS and receiver autonomous integrity monitoring (RAIM) navigation solution for a wide range of air operations. The RAIM processing algorithm, which is standardized and incorporated into most aeronautical GPS receivers, allows operators to check the integrity of GPS satellite signals by exploiting the redundancy of measurements offered by the current constellation.
Although only four satellites in view are needed to calculate the position and time of the aircraft, the current GPS constellation has 31 active satellites, meaning that the receivers are getting signals from more than four satellites much of the time. The RAIM technique takes advantage of these additional measurements to check the integrity of the satellites and ensure the position obtained is correct within the alarm limits established for each operation.
Within the framework of the new project, GMV will lead all phases related to the development of the new AUGUR services, including the definition of requirements, design, implementation, verification, validation and software deployment. Throughout the process of designing, developing and validating the new version, GMV will also continue to provide the current services, ensuring that they are not interrupted. The new version will be available in May 2025.
The improvements made to the AUGUR include RAIM GPS availability displayed on a map and the integration of the planned Navigation Integrity Category (NIC), which measures the quality of the aircraft navigation position transmitted via automatic dependent surveillance–broadcast (ADS-B). It also issues space weather warnings such as solar flares, geomagnetic storms and coronal mass ejections (CME) and has options to import or export geographic data in industry-standard formats.
Should GPS have a satellite-based high-accuracy service, like Galileo’s and BeiDou’s? What would it take to build it?
Bernard Gruber
“No. As Peter Lynch once said, ‘Know what you own, and know why you own it.’ Although this sage advice was for individuals buying equities, I would offer the same for GPS investing in or ‘guaranteeing’ high-accuracy service. Myriad differential GPS solutions currently exist, next generation atomic clocks are in orbit now, internet-based corrections are available. Evolution will improve accuracy, and techniques for higher accuracy will develop when they are needed by the market. I would rather see investment continue in Alt Nav and compatible GPS solutions. As for Galileo and BeiDou authentication plans, I may provide a different answer.” — Bernard Gruber Northrop Grumman
Jules McNeff
“What’s in a name? For most people, GPS already provides a high-accuracy service. Depending on how one uses its signals, you can already track the movement of tectonic plates and changes in Earth reference frames — that’s pretty high accuracy. There are always those who want more, but it’s unreasonable to expect GPS to be the only source, given performance and resilience gains with positioning, navigation, and timing (PNT) augmentations and complements along with GPS basic services. The GPS providers need to focus on Job One, a robust set of GPS services for all its users, and not have that mission complicated further.” — Jules McNeff Overlook Systems Technologies
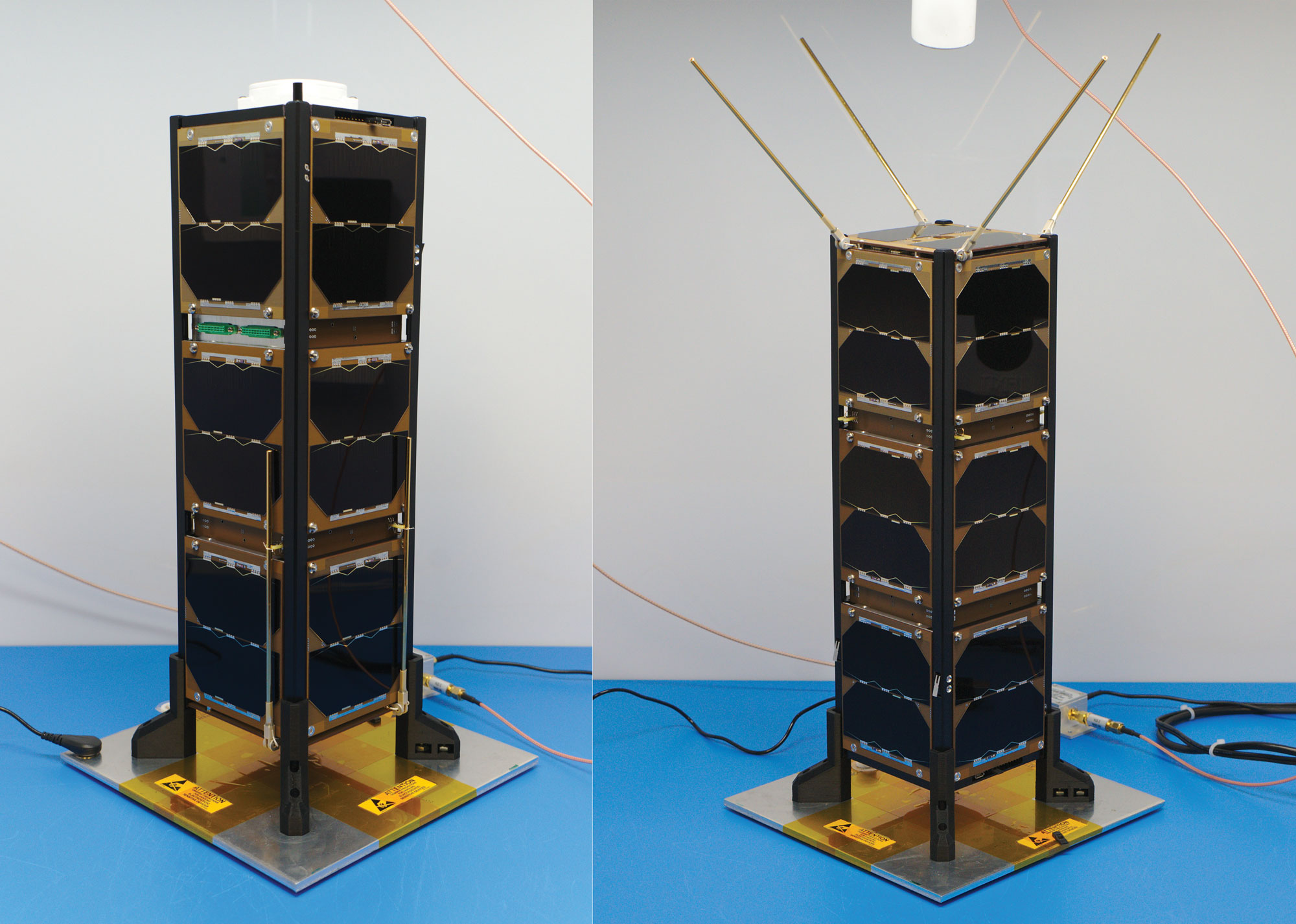
Figure 1: Bobcat-1, with communications antenna stowed (left) and deployed (right). Bobcat-1 measures approximately 10 x 10 x 30 centimeters. (All figures except FIGURE 3 provided by the authors)
Bobcat-1 was a three-unit CubeSat developed and built at Ohio University’s Avionics Engineering Center in Athens, Ohio, and was named after the university’s mascot. FIGURE 1 shows Bobcat-1 with and without its antenna deployed. The satellite was launched to the International Space Station in October 2020 (see FIGURE 2) and deployed into low-Earth orbit (LEO) the following month (see FIGURE 3). In April 2022, it deorbited and burned up in Earth’s atmosphere as planned, after a successful 17-month mission, lasting eight months longer than anticipated. The last signal decoded from Bobcat-1 was received only about 10 minutes before the satellite’s demise, from an altitude of about 109 kilometers, by an amateur radio operator (ZR6AIC) near Johannesburg, South Africa, associated with SatNOGS, a global network of amateur satellite-networked open ground stations.
The main mission of the Bobcat-1 CubeSat was to evaluate the feasibility of GNSS-to-GNSS time offset monitoring from LEO. One of the secondary mission objectives was GNSS spectrum monitoring.
In addition, Bobcat-1 also included a side-mission, hosting a software-defined GPS/Galileo receiver developed by the University of Padova and Qascom — an Italian engineering company providing security solutions in satellite navigation and space cybersecurity — to perform its in-space demonstration and testing. This receiver served as a prototype for the receiver soon to be launched on NASA’s Lunar GNSS Receiver Experiment (LuGRE) mission.
Communications and control of the satellite utilized the 70-centimeter amateur radio satellite band (435-438 MHz) at a typical data rate of 60 kilobits per second and were primarily conducted using a dedicated ground station on the roof of the engineering building at Ohio University (see FIGURE 4). In total, Bobcat-1 collected and downlinked more than 656 megabytes of data during its lifetime. Over the course of the mission, Bobcat-1’s firmware was updated in-orbit on six occasions, allowing for minor enhancements to the data collection system.
Figure 2: Bobcat-1 launches aboard the Cygnus NG-14 resupply mission to the International Space Station. (All figures except FIGURE 3 provided by the authors.)
BACKGROUNDS: GNSS-TO-GNSS TIME OFFSET
GNSS-to-GNSS time offsets — also referred to as GNSS inter-constellation time offsets, inter-system biases or XYTOs — are among the critical parameters for full GNSS interoperability. Users with poor GNSS visibility, such as high-altitude spacecraft, which operate above the GNSS constellations, often do not have enough satellites in view to enable an accurate solution and can experience high dilution of precision. These users could benefit from XYTO estimates provided externally, assuming their receiver-characteristic inter-system biases (ISBs) are calibrated.
To determine a user solution using measurements from a single GNSS constellation, one must solve for four unknown parameters: the user’s spatial coordinates and the receiver-to-system time offset. This means that a minimum of four satellites must be visible to solve for a user solution. If a user has sufficient visibility of satellites from different constellations, a multi-GNSS solution can be determined. However, when applying measurements from multiple constellations, an additional unknown is added for each constellation used. For example, for a user solution incorporating measurements from both GPS and Galileo, one needs to solve for five unknowns: the user’s spatial coordinates, the receiver-to-GPS time offset, and the receiver-to-Galileo time offset. Since each constellation’s time scale is independent of the others, the inter-system time offset between the time scales leads to a prominent bias in a multi-constellation solution. Inter-system time offsets between GPS, Galileo, GLONASS, and BeiDou are generally expected to range from 10 to 100 nanoseconds, resulting in 3 to 30 meters of possible positioning error.
System-to-system time offsets are currently estimated by extensive networks of ground stations, such as those used by the International GNSS Service Multi-GNSS Experiment (MGEX). In addition, GNSS service providers often broadcast XYTO estimates in their navigation messages.
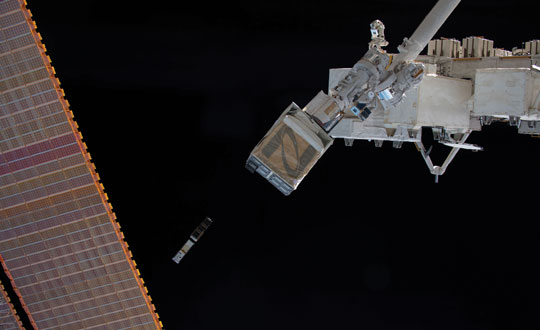
Figure 3: Bobcat-1 is deployed into low-Earth orbit by the Nanoracks CubeSat Deployer alongside SPOC, a CubeSat developed by the University of Georgia. (Photo: NASA)
So, why would estimating XYTOs from LEO be of interest?
Low-Earth orbit enables high GNSS visibility. The approximately 90-minute orbital period allows for observations from nearly all GNSS satellites multiple times per day. This enables high visibility of multiple satellites from each constellation, in turn enabling high observability of constellation parameters such as XYTOs, leveraging satellite-characteristics errors. In addition, tropospheric errors are absent and multipath is limited and can be bounded based on the CubeSat’s dimensions and geometry. Exploiting measurements from LEO could provide additional measurements and independent monitoring of the XYTO estimates provided by ground networks.
However, to estimate system-characteristic XYTOs, the receiver-characteristic biases need to be calibrated. The target is to reach accuracy of approximately 1 nanosecond or possibly lower. Therefore, the error sources need to be evaluated, mitigated, or bounded.
Figure 4: Bobcat-1’s dedicated ground station on the roof of Stocker Center in Athens, Ohio. (All figures except FIGURE 3 provided by the authors.)
Although the ionospheric effects are lower in LEO than on Earth, they cannot be neglected. Therefore, dual-frequency ionospheric delay estimates must be applied. To do so, the receiver’s inter-frequency biases (IFBs), which can introduce errors on the order of nanoseconds, need to be calibrated, as well as the satellite differential code biases (DCBs), orbit and clock errors and receiver antenna group delay. An additional challenge introduced by the LEO environment is the wide range of temperatures to which the receiver is subjected. Over a single orbit, the receiver’s temperature can vary from approximately 0 to 50 degrees Celsius. The effects of these temperature variations cause fluctuations in the receiver’s IFBs, which need to be evaluated and calibrated. Pre-launch measurements in a controlled environment using a climate chamber and two receivers of the same make and model were used for calibration. We have detailed those measurements elsewhere.
The multipath error can be bounded, as a first approximation, to 10 centimeters (or about 0.3 nanoseconds in equivalent signal delay) due to the dimensions of the CubeSat. However, given the mount of the antenna is on one of the CubeSat’s two 10 × 10 centimeter faces, that upper bound is in practice much smaller and the multipath error is mostly negligible.
Finally, the last remaining major error sources to be calibrated are the receiver ISBs. The main goal, to demonstrate the feasibility of LEO-CubeSat-based monitoring of GNSS XYTOs, requires showing the stability (or the repeatability) of the receiver biases in orbit.
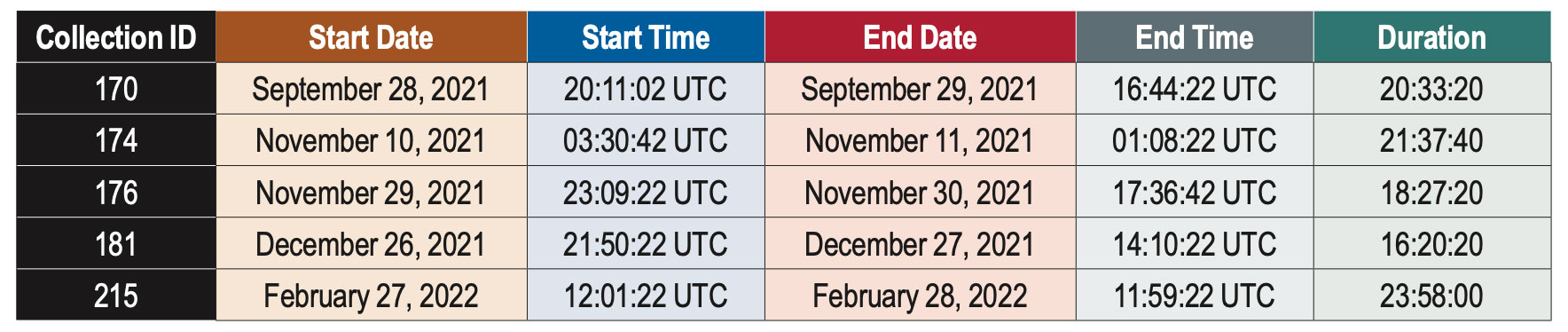
Table 1: Summary of data collections discussed in this article.
DATA COLLECTION
Bobcat-1’s primary payload was a NovAtel OEM719, a triple-frequency multi-GNSS receiver, enabling measurements on all frequencies from GPS, GLONASS, Galileo and BeiDou, as well as the regional navigation satellite systems (RNSSs) QZSS and NavIC. The measurements were collected and downloaded, for post-processing purposes.
Pseudorange and carrier-phase measurements, as well as carrier-to-noise-density ratio estimates, were collected, together with the receiver’s position and velocity estimates, and other parameters such as the temperature measured by the two sensors embedded in the receiver. In limited instances, power spectral density measurements and in-phase and quadrature (I/Q) component samples were collected to support the secondary mission, GNSS spectrum monitoring. The limited downlink capacity of the satellite constrained these measurements to short time intervals.
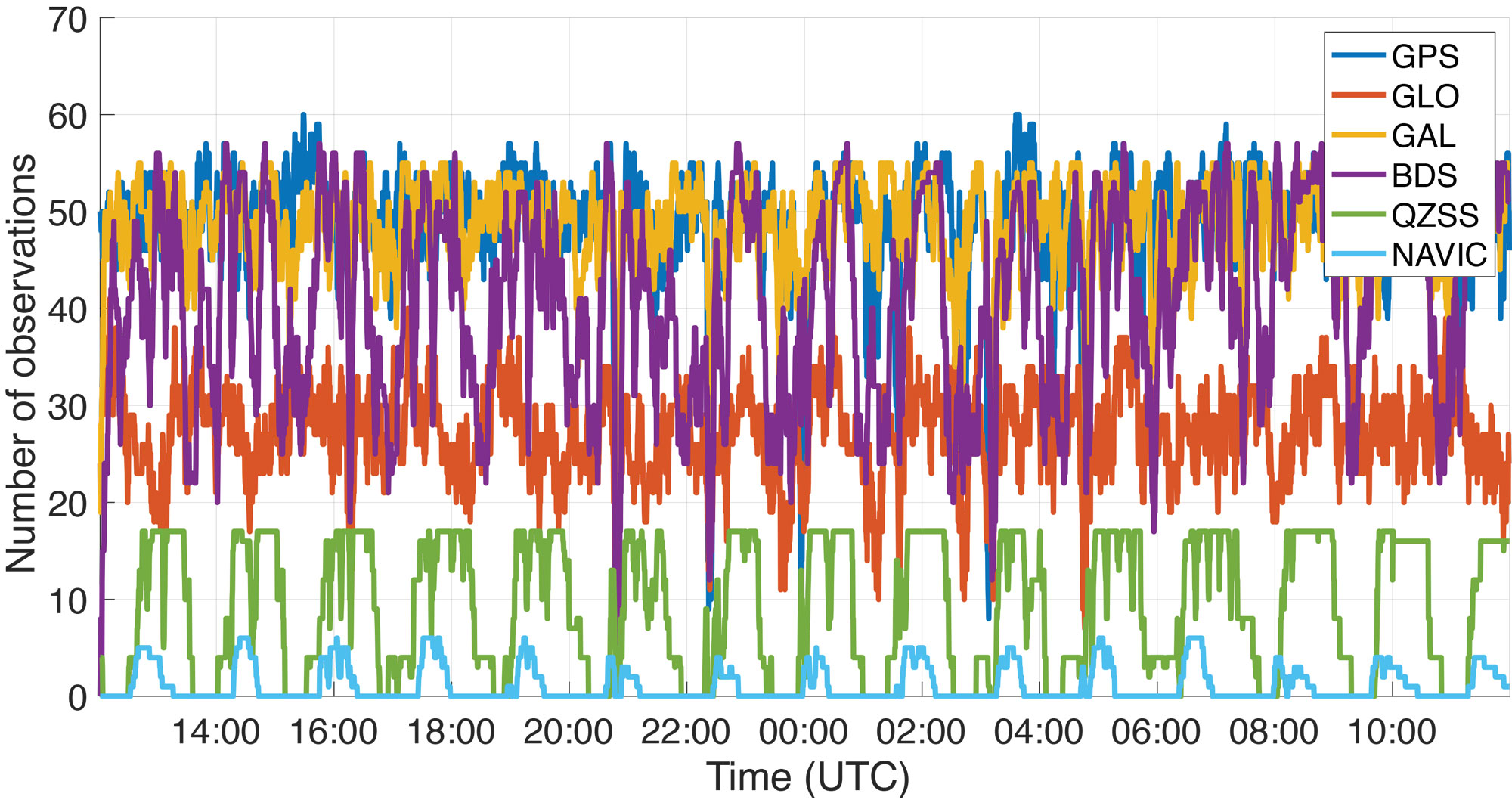
Figure 5: Number of observations recorded by Bobcat-1 from each GNSS constellation during a data collection started on February 27, 2022.
The goal of the mission is to estimate the XYTOs for all the GNSS constellations. However, in this article only the Galileo-to-GPS time offset (GGTO) is considered. The Galileo Performance Reports published by the European Union Agency for the Space Programme (EUSPA) provide information on the accuracy of the GGTO broadcast parameters, which are typically within approximately 3 nanoseconds of the true GGTO. Therefore, the broadcast GGTO provides a point of comparison and reference for Bobcat-1’s estimates.
A summary of the data collections considered in this work is provided in TABLE 1. These data collections are among the longest recorded by Bobcat-1. As an example, FIGURE 5 shows Bobcat-1’s data collection for February 27, 2022. It should be noticed that data collections were initiated from the control station at Ohio University when the CubeSat was in view, and each data collection would start only when the satellite’s battery voltage was above a defined threshold. The collection would stop safely if a minimum voltage threshold was reached. The data sets collected during the first months of the mission had durations limited to one to four hours, since the minimum battery voltage threshold was set conservatively. However, as the mission continued, data collections recorded in the last several months before deorbiting were configured with lower thresholds, enabling continuous data collections with durations of up to 24 hours. During the longer data collections, the sampling period was set to 20 seconds to reduce the total quantity of data stored and downlinked. The work described here focuses on a select few data collections that span a period of five months between September 28, 2021, and February 27, 2022.
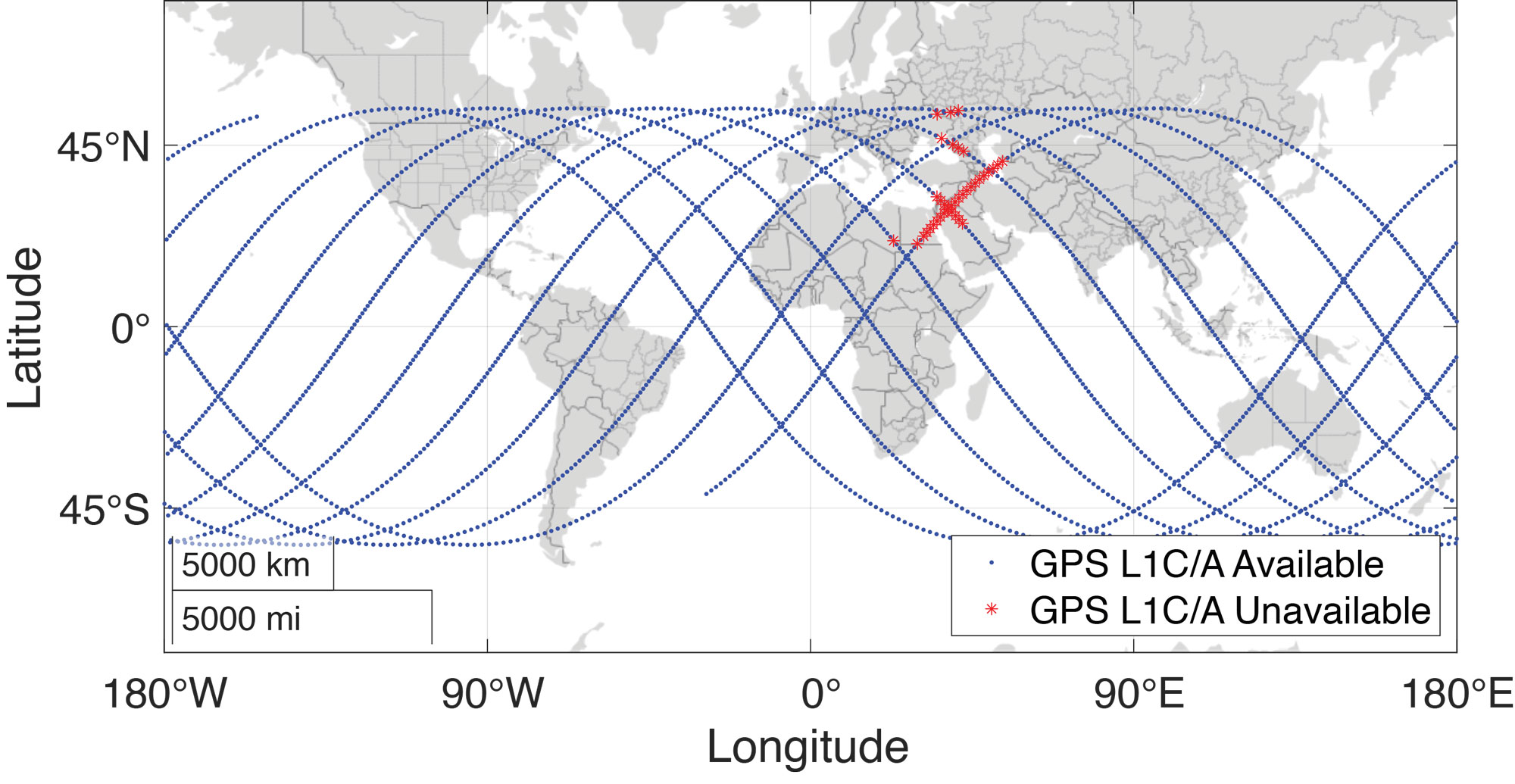
Figure 6: Bobcat-1’s ground track during a data collection for XYTOs estimation held in February 2022, approximately 24-hours long. Note that the blue dots correspond to the positions (latitude and longitude) of Bobcat-1. The red stars indicate that even if the position was calculated thanks to a multi-frequency and multi-GNSS solution, GPS L1 C/A measurements were not available. Analysis of the carrier-to-noise-density ratio measurements and comparison with the available spectrum measurements showed that in correspondence to those positions interference was present.
The data contain multi-frequency measurements from all systems, with an average of 180 observations made per sample. The maximum number of observations at once was 217. While multi-frequency measurements were collected from all constellations, this analysis only uses single-frequency measurements from two constellations: GPS L1 C/A and Galileo E1C.
RESULTS
There are two simple approaches to calculating inter-constellation time offsets: one involves computing multiple single-constellation user solutions, and the other involves a single multi-constellation user solution. Each approach has slightly different effects in terms of error propagation. In the first approach, the XYTOs can be calculated by taking the difference of the independently calculated receiver-to-system time offsets. This method requires at least four satellites from each constellation to be visible. In the second approach, all the receiver-to-system time offsets for all constellations involved in the solution are solved simultaneously. This reduces the number of measurements required per-constellation, with the minimum number of measurements needed being equal to the number of unknown state variables.
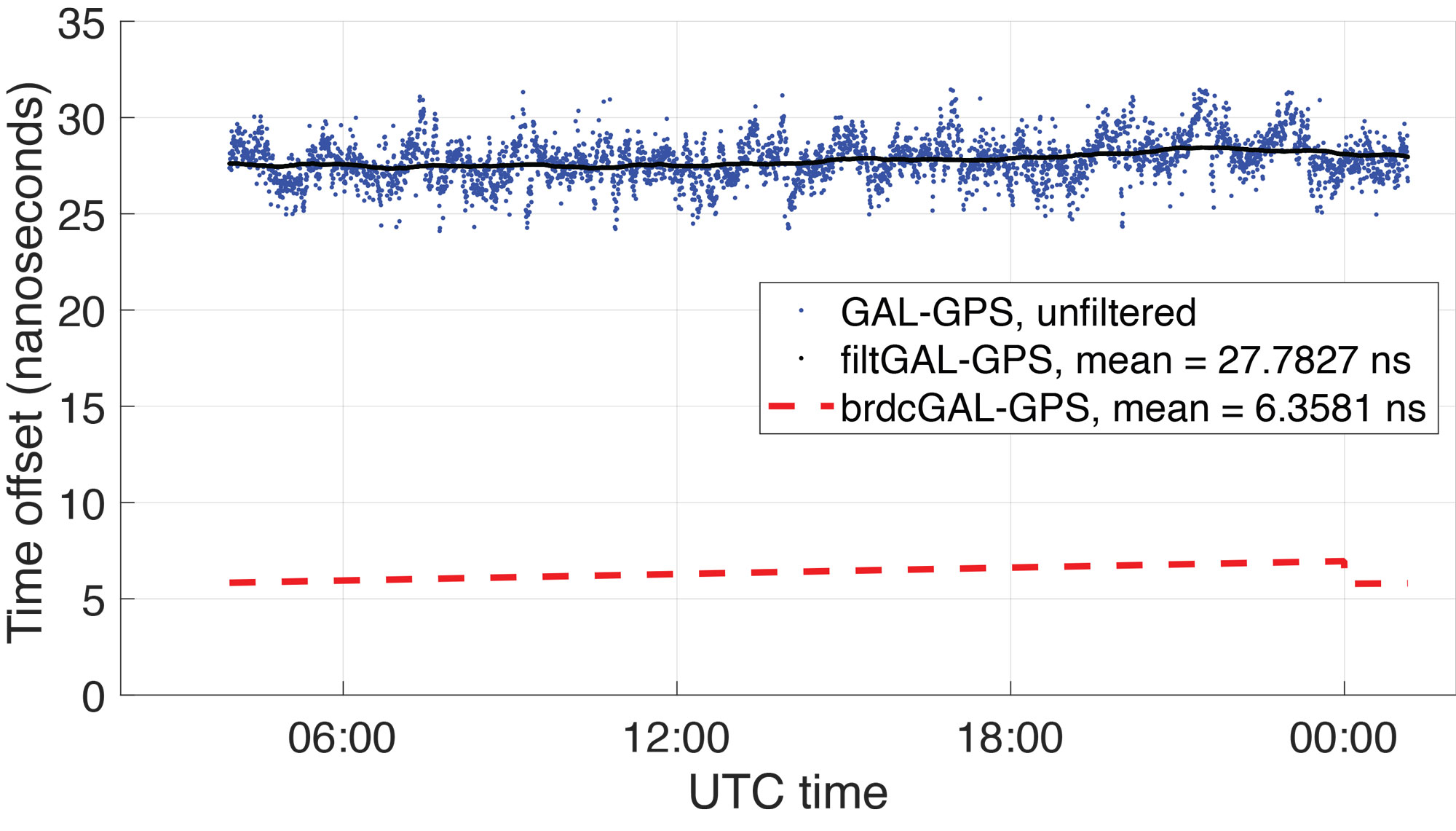
Figure 7: Broadcast GGTO (red) compared to Bobcat-1 Galileo-GPS time offset estimate, before calibration (blue) and filtered estimate (black). The results are related to data collection 181, started on December 27, 2021, which lasted about 16 hours (more than 10 orbits). The estimates’ variations, on the order of ±5 nanoseconds, are mainly due to temperature effects during the orbit and here are simply represented with a moving average.
In general, the latter method improves the XYTOs’ solution availability since the receiver-to-system time offsets for each system can be calculated with even fewer than four measurements from each system. For each sample point, the user solution was determined using this method, and the GGTO estimate was calculated by taking the difference of the receiver-to-GPS time offset and the receiver-to-Galileo time offset. This method allows the XYTO to be estimated by the receiver even when visibility is degraded. For example, as shown in FIGURE 6, Bobcat-1’s data collections are affected by interference, mostly on GPS L1, in some regions. Points where interference was believed to be present are marked by red stars on Bobcat-1’s ground track shown in the figure, specifically denoting points where the number of tracked GPS L1 C/A signals drops below four. For each sample point, the user solution was determined using the method discussed above, and the GGTO estimate was calculated by taking the difference of the receiver-to-GPS time offset and the receiver-to-Galileo time offset.
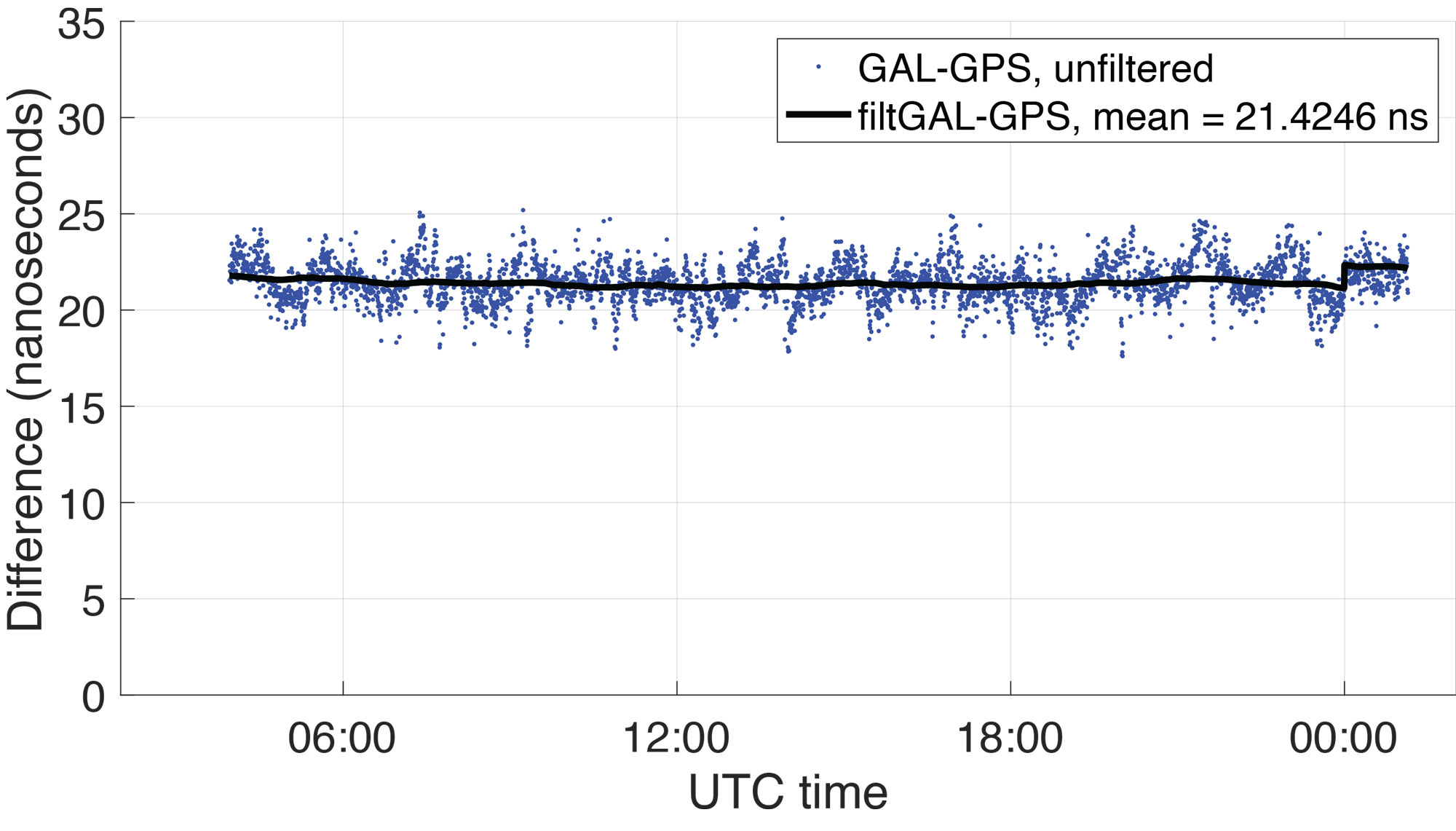
Figure 8: Difference between Bobcat-1 estimate and GGTO. The residual is mainly an estimate of the receiver inter-system bias that even pre-calibration shows to be stable in orbit as shown in Table 2.
FIGURE 7 shows (in blue) the GGTO estimate using Bobcat-1 measurements (data collection 181, started on December 27, 2021, and lasted about 10 orbits). The plotted values are the estimate of the system-to-system bias (GGTO) from which the receiver-specific ISB (Galileo-to-GPS) has not yet been removed. The oscillations visible in the unfiltered GGTO estimates are the result of temperature effects on the receiver. They can be mitigated by applying the calibrations made during pre-launch climate chamber testing, though for this analysis the estimates are simply filtered using a moving average (shown in black in the figure). Note that the abrupt change in the broadcast GGTO about 21 hours after the collection start corresponds to the start of a new day in UTC time, when a new estimate of the broadcast GGTO parameters was provided.
In FIGURE 8, the difference between the Bobcat-1 estimate of the GGTO and the broadcast GGTO is plotted (raw, in blue, and filtered with a moving average, in black). This is an estimate of the Bobcat-1 receiver’s Galileo-to-GPS ISB, which needs to be stable and repeatable in orbit, to enable accurate estimates of the true GGTO. As Figure 8 indicates, the receiver ISB shows stability even before calibration, showing periodical variations mainly due to temperature changes over the orbit.
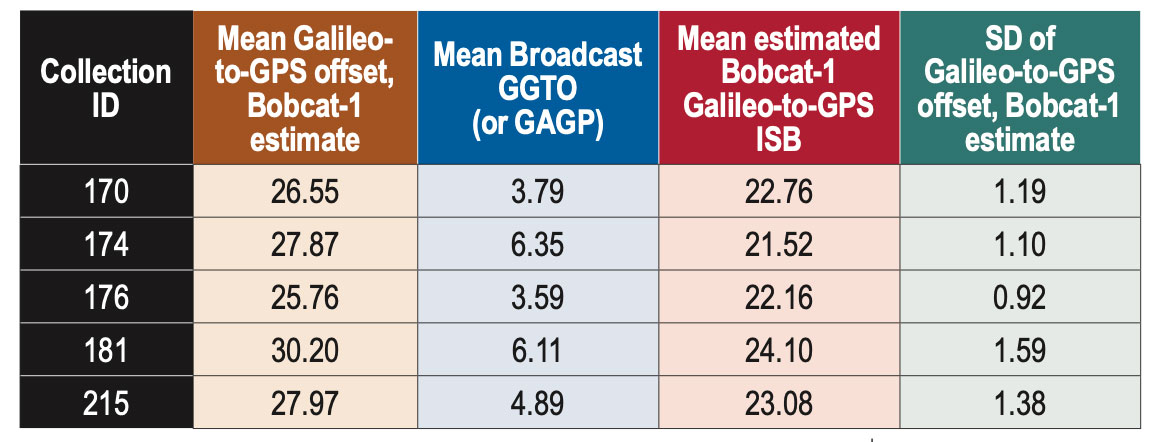
TABLE 2 summarizes some results over a five-month period. Only the longest data collections were considered, but the shorter ones are also under analysis to provide a longer and denser observation window. From the data in Table 2, the Bobcat-1 receiver’s mean Galileo-to-GPS ISB, estimated by comparison with the broadcast GGTO, shows a standard deviation, pre-calibration, of less than 1.5 nanoseconds over five months. Considering that the accuracy on the broadcast GGTO is expected to be ≤ 3 nanoseconds, this estimate of the receiver ISB shows that its stability over time may enable accurate XYTO monitoring from LEO.
Table 2: Bobcat-1 Galileo-to-GPS time offset vs broadcast GGTO, for different data collections over about five months. All figures in columns two through five are in nanoseconds.
The implementation of the receiver bias calibration, including the temperature effects, will refine this result. The final test will include assessing the performance of the calculated system XYTO, utilizing it in the solution of another receiver previously calibrated and at a known location.
CONCLUSIONS
Results of five 15+ hour data collections spanning a period of five months are compared. The difference between the broadcast GGTO and the GGTO estimate calculated using data from Bobcat-1 appears to be stable within 1.5 nanoseconds. Observing the in-orbit data and comparing it with the data collected previously in a controlled environment in the laboratory, a high correlation is observed between the bias change over time and the measured receiver temperature. The mitigation of this effect will enable stability of our receiver characteristic GGTO estimate to within 1 nanosecond. These experimental results suggest that a few multi-GNSS receivers in LEO could provide a method to monitor XYTOs in near real time, providing redundancy and diversity to the ground-network-based estimation system.
ACKNOWLEDGMENTS
The authors would like to acknowledge NASA’s Satellite Communication and Navigation Office (SCaN), NASA’s Glenn Research Center, NASA’s CubeSat Launch Initiative (CSLI), and Ohio University for funding the Bobcat-1 CubeSat mission. Additionally, we thank Kevin Croissant and Gregory Dahart, previous student members of the Bobcat-1 team, and Dr. Frank van Graas, Ohio University Professor Emeritus and former faculty member of the Bobcat-1 team.
This article is based on the paper “Receiver-specific GNSS Inter-system Bias in Low-Earth Orbit” presented at ION ITM 2023, the 2023 International Technical Meeting of the Institute of Navigation, Long Beach, California, January 23-26, 2023.
Topcon Ninja Wildcat, one of the sponsored characters featured in the Get Kids into Survey campaign. (Image: Topcon)
Topcon Positioning Systems has expanded its support for the Get Kids into Survey (GKiS) project, now serving as the exclusive sponsor of the Global Brand Ambassador Hub. This new platform will offer a comprehensive range of resources to the project’s Brand Ambassadors, a worldwide community of volunteers who visit schools to advocate for surveying as a career and introduce students to the surveying and geospatial industries.
Get Kids into Survey originated in 2017 and was initiated by cofounder Elaine Ball through the creation of a poster that surveyors could use to explain the profession to children. Since its inception, the project has continued to highlight the work of surveyors for young audiences, backed by an industry keenly aware of the necessity to attract the next generation of surveyors.
The Hub will allow GKiS to develop and host resources for the global network of ambassadors and aims to increase participation in career fairs, workshops and educational activities across more than 30 countries.
By sponsoring a homework project with GKiS, Topcon will also have its own unique GKiS cartoon character, Yumi the Wildcat Survey Ninja. Yumi will be the face of the Topcon brand to young aspiring surveyors and be given her own Character Spotlight on the GKiS blog.
Research conducted by Topcon has shown that nearly a third of construction managers throughout Europe have identified skill shortages as a major challenge in their projects.
According to Topcon, this shortage stems from a combination of experienced employees leaving the industry and a lack of recruits. Programs such as GKiS represent just one example of the outreach and educational initiatives designed to address and reverse this trend.
“The GKiS project is about lifting the lid on the geospatial and survey industries for young people, and showing that they are exciting, future-gazing and technology-driven careers,” said Elaine Ball, co-founder of GKiS.
1Spatial, a location master data management (LMDM) software and solutions provider, has secured a three-year contract with a leading Distribution System Operator for electricity and gas networks in Belgium. 1Sparial plans to support the utility company in developing a digital twin for its distribution network, with a focus on enhancing the quality and precision of its geospatial data.
The contract is for geospatial data processing services. 1Spatial’s 1Integrate will be used for data quality control, validation and geospatial data production services.
The project will allow the utility company to efficiently manage distribution networks and make connections and repairs while ensuring safety.
The total contract value to 1Spatial is €9 million, of which 1Spatial will deliver €4.1 million including €0.3 million in term software license revenue. 1Spatial will utilize partners to deliver the balance of the work, with a total value of €4.9 million, over the three-year duration of the contract.