Keysight Technologies Inc. completed its acquisition of Spirent Communications in a deal valued at $1.46 billion on a fully diluted basis. The acquisition expands Keysight’s software-based testing, network assurance and GNSS capabilities across multiple industries.
Spirent Communications provides automated test and assurance systems for network performance, cybersecurity and positioning. The company supports testing for 5G, SD-WAN, cloud and autonomous vehicle systems. By joining Keysight, Spirent adds network automation, lifecycle management and GNSS testing to the company’s product suite, enabling customers to manage system performance from design to deployment. The acquisition also strengthens Keysight’s position in areas including non-terrestrial networks, low-Earth orbit (LEO) satellite constellations and 6G development.
“Spirent’s industry-leading positioning technologies portfolio strengthens our end-to-end solutions across commercial communications and aerospace defense, especially as applications such as non-terrestrial networks, low Earth orbit constellations and emerging 6G standards gain traction over the next few years,” said Kailash Narayanan, senior vice president at Keysight Technologies.
Spirent’s shares will be delisted from the London Stock Exchange effective Oct. 17. Its operations and financial results will be integrated and reported within Keysight’s Communications Solutions Group. Spirent shareholders will receive $2.55 per share, comprising $2.50 in cash and a previously paid special dividend of $0.04 per share.
A new Turkish-made twin-jet kamikaze drone, showcased at the Ateş Serbest-2025 exercise, features GNSS-independent autonomy, with GNSS/GPS signals, supplemented by odometric data where necessary, reports Defence Turk and Defence Index. With specially designed avionics and onboard visual-odometry algorithms, the drone can navigate and reach its assigned coordinates without dependence on satellite positioning.
According to information obtained by both news outlets, the KZ-350 drone is being developed with a target range of 350 km. Its cruising speed is 500 km/h, cruising altitude is 3,000 meters. Its takeoff weight is 120 kg and warhead 25 kg. Two domestically produced jet engines power the drone.
Once a mission profile is uploaded, the KZ-350 is intended to operate in a “fire-and-forget” mode. It autonomously follows its flight plan to the target area and executes its strike without external guidance.
🇹🇷 Türkiye unveils the MKE KZ-350 Kamikaze UAV
🔹 Twin-jet design for high-speed precision strikes 🔹 300+ km range for long-distance operations 🔹 Powered by a domestic jet engine 🔹 Designed for stand-off and deep-strike missions 🔹 Marks a major leap in Turkish drone warfare… pic.twitter.com/wCYenNogcK
Advanced Navigation, a global leader in assured positioning, navigation and timing (PNT) and autonomous systems, has introduced a line of defense-ready inertial navigation systems (INS) featuring integrated electronic protection (EP) capabilities.
The systems are designed to counter electromagnetic warfare threats and ensure mission continuity amid a global surge in GPS jamming and spoofing attacks.
The electronic protection range includes:
Boreas D Series, including the Boreas D50, D70 and D90 fiber-optic gyroscope (FOG)-based inertial navigation systems. Engineered for high-threat operational theaters, the Boreas D series supports multiple vehicle types and links to battlefield management systems and health and usage monitoring systems.
Certus Evo, an ultra-high accuracy MEMS GPS/inertial navigation system. The compact Certus Evo is designed for applications requiring navigation, stabilization and pointing under high-dynamics conditions.
The rollout builds on Advanced Navigation’s announcement to establish PNT Centers of Excellence (COE) across the United Kingdom, United States and Europe to address the operational needs of NATO forces.
Advanced Navigation’s Boreas D50 is engineered for high-threat scenarios. (Credit: Advanced Navigation)
Maximilian Doemling, chief product officer at Advanced Navigation, said countering signal jamming and spoofing requires solutions that are several steps ahead.
“This means embedding electronic protection into the foundation of every system,” Doemling said. “Our new electronic protection range takes our proven inertial navigation technology and combines it with advanced capabilities to detect and neutralize interference in real time.”
The systems provide real-time detection of GPS interference, cryptographic validation to identify spoofing and adaptive filtering to sustain positioning integrity. A built-in spectrum analyzer provides real-time monitoring of the radio frequency spectrum with configurable notch filters.
The electronic protection range incorporates dual-antenna, multi-band GPS receivers supporting up to three frequency bands for improved satellite visibility in high-interference zones.
The systems are engineered for integration into new and legacy defense platforms including combat vehicles, unmanned ground vehicles, artillery, counter-unmanned aircraft systems, radar pointing systems, intelligence, surveillance and reconnaissance payloads, unmanned aerial vehicles, unmanned surface vehicles and autonomous underwater systems.
In September 2024, a coalition of U.S. aviation and maritime stakeholders raised concerns over the surge in GPS jamming and spoofing incidents affecting civilian airspace and international shipping lanes. The Federal Communications Commission announced plans to initiate a formal inquiry into alternative and redundant positioning, navigation and timing systems.
Australia has established the Joint PNT Directorate, now at initial operating capability. In the U.K., the government is working to implement a framework for greater positioning, navigation and timing resilience.
Advanced Navigation backs its solutions with a three-year warranty. All Advanced Navigation solutions are free of International Traffic in Arms Regulations restrictions.
The Boreas D50, Boreas D70, Boreas D90 and Certus Evo are available for shipment.
The demand for autonomy is accelerating across industries, reshaping how systems are being developed and deployed.
For UAVs, the push for precision is driven by emerging use cases, such as package delivery, medical transport and complex route navigation in urban environments, all of which require centimeter-level accuracy in positioning and landing.
Importance of Correction Services
Trimble is expanding its Centerpoint RTX positioning technology from agriculture and surveying applications into the rapidly growing autonomous markets of UAVs, robotics and vehicles.
CenterPoint RTX is a global correction service that delivers centimeter-level positioning accuracy, engineered to ensure reliable and precise positioning anywhere around the world.
RTX employs a fixed, stable datum to ensure consistent and reliable performance. The system supports all major satellite constellations and frequencies, offering users a robust and flexible positioning system. The service can be accessed through either L-band satellite signals or a standard internet connection, eliminating the need for local base stations and making high-precision positioning far more scalable and accessible.
This level of reliability is crucial for emerging applications such as drone delivery.
“When you start talking about package delivery, operators need robust positioning,” explained Joe Hutton, director of inertial technology and airborne products at Trimble Applanix. “One reason is what we call ‘the last meter’ — drones need to be able to land or drop packages consistently within that final meter of their destination.”
Hutton noted that precision requirements are becoming even more demanding. “It’s actually getting smaller than a meter now. You need that robust centimeter-level positioning to ensure the drone is in exactly the right spot for safe and accurate delivery.”
When asked about alternative positioning methods, Hutton explained why traditional RTK systems can fall short for these applications. “RTK has its traditional limitations,” he said. “You have to be within 20 km of a base station, you need to set up infrastructure, and then you face all kinds of datum issues between different base stations.”
This is where CenterPoint RTX offers a significant advantage. “You don’t get those problems with CenterPoint RTX because it’s a global correction service operating on a fixed reference datum that never changes,” Hutton explained. “If you use the same technology to survey your landing spot — say with a Trimble DA2 product using RTX — everything fits perfectly. It’s always going to be in the same datum.” He noted that this consistency has proven very popular with users because it eliminates the complex datum coordination issues inherent in RTK systems.
Beyond datum consistency, Hutton highlighted another critical consideration: signal robustness and jamming and spoofing. “While commercial drone applications typically operate outside conflict zones where intentional jamming occurs, operators still need protection against interference,” he said. “You can have radios causing jamming just inadvertently.”
Trimble’s OEM GNSS/INS systems for UAV navigation, such as Trimble PX-1, use aided inertial navigation system (INS) software that blends GPS positioning with inertial sensors using RTX corrections to offer robust position and orientation data — including precise roll, pitch and heading measurements — that can maintain accuracy even during short GNSS signal outages.
The system provides inertial-based heading, which addresses another critical challenge in drone navigation. Traditional approaches rely on magnetometers for heading determination, but these are easily influenced by nearby metal structures and electromagnetic interference. In contrast, inertial-derived heading comes directly from the IMU itself, making it immune to magnetic disturbances and far more reliable in complex environments, making it suitable for drone delivery in busy urban environments.
Advanced Navigation has successfully demonstrated a breakthrough in underground navigation, delivering high-precision positioning without reliance on fixed infrastructure or GNSS.
The demonstration of the company’s Hybrid Navigation System was livestreamed from the Pyhäsalmi Mine in Pyhäjärvi, Finland, as part of the Deep Mining Open Call under the Think and Act Differently program sponsored by BHP, an Australian mining and metals corporation.
The Deep Mining Open Call, launched in September 2024, sought innovators with capability that could be applied to deep underground mining. The focus was on addressing challenges such as high temperature, high rock stress, and hyper-saline conditions in deep mining environments. The inactive Pyhäsalmi mine has the harsh conditions and depth required for the technology test.
Based in Australia, Advanced Navigation was selected from more than 90 global applicants to demonstrate its technology.
Positioning Challenges
Navigating the vast subterranean network of the Pyhäsalmi Mine posed significant challenges. The mine is situated just two degrees below the Arctic Circle, where traditional systems fail. Located 1.4 km underground at a latitude of 63°, it is completely impervious to GNSS signals. Its repetitive, multi-level tunnel network creates a high risk of visual disorientation, while its metallic ores distort magnetic fields and scatter radio waves.
To overcome these conditions, mines typically rely on infrastructure-heavy solutions such as ultra-wideband beacons, Wi-Fi, 5G repeaters or perception-based techniques such as simultaneous localization and mapping (SLAM), which require cameras. These methods are costly to integrate and maintain, slow to install, and often unavailable in hazardous or unmapped zones where reliable navigation is critical. Shifting to a resilient navigation system with less dependency on infrastructure offers a scalable alternative, enabling reliable navigation even in environments considered hazardous or inaccessible.
System Architecture
Advanced Navigation’s Hybrid Navigation System demonstrates long-range, infrastructure-free, real-time navigation in a deep, GPS-denied environment. The system combines a laser velocity sensor (LVS) with the Boreas D90 fiber-optic gyroscope inertial navigation system (FOG INS).
FOG INS. The Hybrid Navigation System is centered on the Boreas FOG INS. Unlike conventional systems, Boreas doesn’t rely on GNSS or magnetic compasses. Instead, it uses ultra-sensitive FOG technology to detect the Earth’s rotation and determine true north, a process known as gyro-compassing, to find the vehicle’s heading.
For the test, the Boreas D90, along with various additional equipment providing power, networking and logging capabilities, was secured inside the vehicle.
LVS. To maintain and enhance this accuracy, the INS is fused with Advanced Navigation’s LVS. Using infrared lasers, LVS continuously measures the vehicle’s true 3D velocity relative to the ground. This real-time data is critical for correcting the gradual drift that occurs in standalone inertial systems, enabling the hybrid system to maintain precision over extended distances.
The LVS sensor features two components: an external, passive optical head, and an active sensor body. The optical head is primarily responsible for rigidly holding the alignment between the three telescopes. The sensor body houses the active photonics system, laser and processing system.
Because pre-production hardware was used for this test, three discrete fiber-optic cables were used to connect the externally mounted LVS optical head to the LVS sensor inside the vehicle. Production hardware will include a single, IP69K rated optical-fiber cable that connects the LVS sensor body to the IP69K rated optical head.
The LVS optical head was attached to the trunk of the vehicle using a suction cup to provide a clear line of sight from each telescope to the terrain. A GNSS antenna was attached to the roof in the same manner. Coaxial cable connected the GNSS antenna to the Boreas D90.
Fusion Software. The system integration relied on the company’s AdNav OS Fusion software. Using adaptive algorithms, OS Fusion dynamically weighs the reliability of each sensor in real time.
Together, these technologies form a resilient hybrid system delivering precise, uninterrupted navigational data in extreme environments, without GNSS or fixed infrastructure, the company said.
“We were thoroughly impressed by the results the sensor fusion provided,” said Magnus Zetterberg, senior consultant at Combitech, who observed the demonstration. “I have used and been exposed to these sorts of sensors in other projects, and nothing has come close to this level of performance. It’s clear the Laser Velocity Sensor is a major key in providing these outstanding results.”
Proven in the Depths
A one-time surface calibration using real-time kinematic GNSS aligned the LVS and INS frames on the vehicle, a Mercedes-Benz V-class. After the calibration, the trials were unaided within the underground environment.
Two different test scenarios were conducted: a surface-to-surface test, and an underground loop test. Validated across five separate runs in isolation from external aids or maps, the Hybrid Navigation System repeatedly achieved an accuracy of better than 0.1% of distance traveled — demolishing a barrier once considered fundamental to underground navigation.
Without relying on any fixed positioning infrastructure, pre-existing maps or external aiding, the tests achieved consistent sub-0.1% navigation error across multiple runs.
Surface-to-Surface Runs
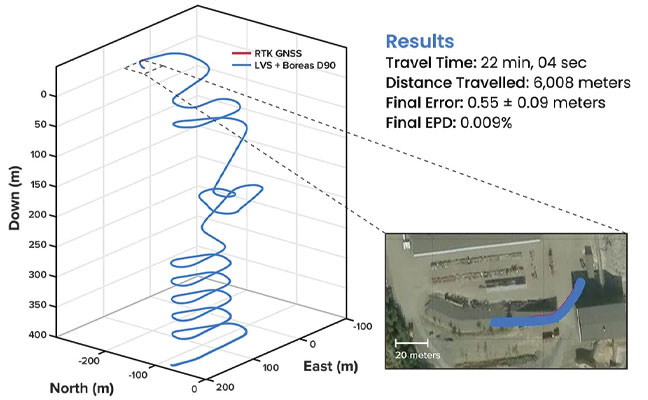
Runs 1, 2 and 3 – 400 m. To demonstrate the system’s repeatability and accuracy, three identical runs were conducted to a depth of 400 meters. Each run involved an approximate 3 km one-way traverse for a full 6 km loop. The results highlight the system’s consistent performance during underground operation, with a mean final position error of 2.83 ±0.09 meters, representing 0.047% of the total distance traveled.
FIGURE 1 3D navigation trace of run 2 of the repeat surface-to-surface 400 m depth tests. This particular run covered 6,008 m, with a measured error of 0.55 ±0.09 m for 0.009% error per distance traveled.
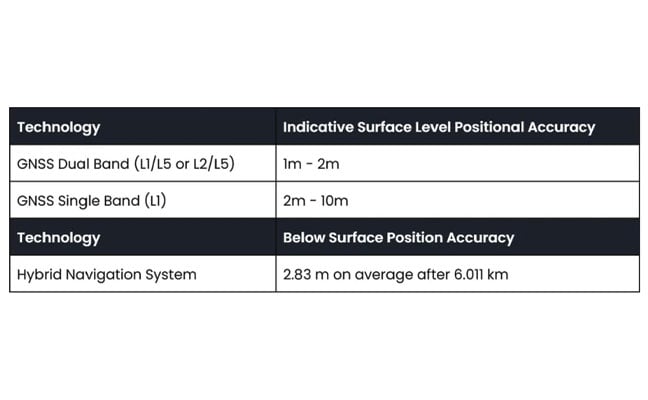
Over the 6 km rough and rugged terrain that extended 400 m below the surface, the system achieved a best-case 3D position error of 0.55 m (0.009%), with an average error of 2.83 m (0.047%). For context, standard single-band GNSS on the surface typically delivers 2–10 m accuracy in open-sky conditions. The system delivered significantly greater precision even within a subterranean labyrinth. FIGURE 1 present the key performance metrics for these runs. FIGURE 2 shows reacquisition of GNSS signals upon exiting the mine.
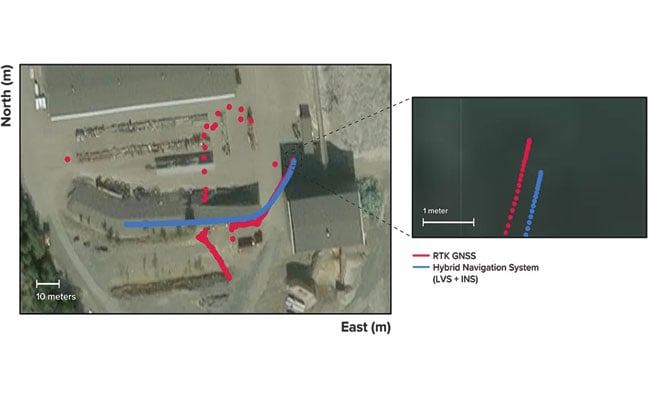
FIGURE 2 Traces of raw RTK GNSS and position estimates from the Hybrid Navigation System. As the vehicle exits the tunnel portal, intermittent and low accuracy GNSS is measured. Once the vehicle enters open sky, a more consistent RTK GNSS fix is attained. Note that despite the presence of now-accurate RTK GNSS, at no point did the Hybrid System use GNSS information.
“We’ve worked in underground environments for decades. Seeing this level of precision achieved on the first run signals huge potential for safer and more efficient underground vehicle operations,” said Olli Mylläri, vice president of technology at Normet, a mining technology company.
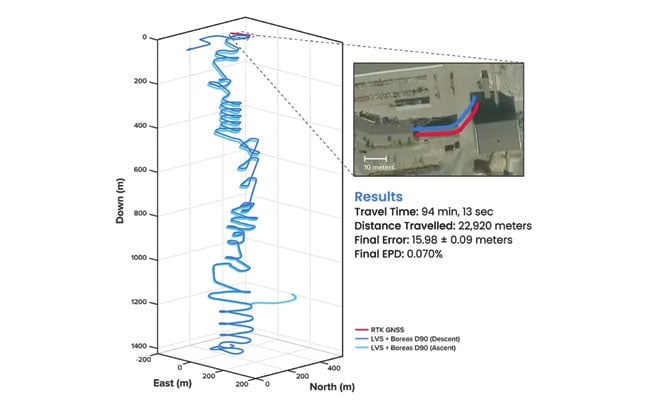
Run 4 – 1,400 m. To evaluate the system’s performance over an extended distance, a single run was conducted to the deepest accessible point of the mine, reaching a depth of 1,400 m. The system navigated the 22.9 km route — the equivalent of a half-marathon — in total darkness.
The final position error was 15.9 m (0.07%), showcasing its immunity to the drift that plagues other inertial systems. This extended traverse, lasting more than 94 minutes, also included a deliberate stationary period at the bottom before the return to the surface. The performance of this deep run is detailed in FIGURE 3.
FIGURE 3 3D navigation trace of the run down to 1,400 m depth. The test traversed a total distance of 22,920 m, with a measured final error of 15.98 ±0.09 m yielding an error per distance traveled of 0.070%. The descent and ascent paths are colored differently for disambiguation. During the ascent (light blue), the driver entered a side tunnel at a depth of approximately 1,200 m, which was not traversed on the descent.
Entirely Underground
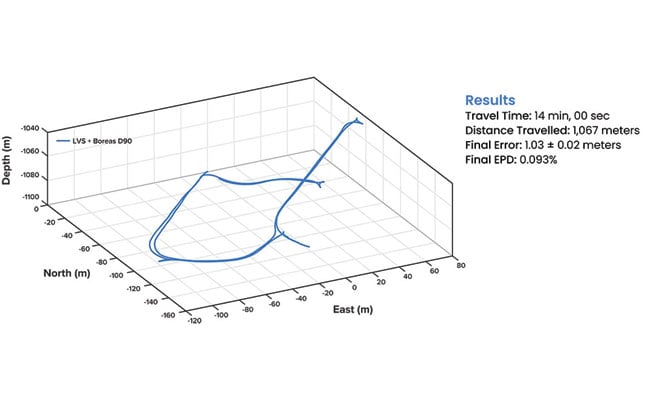
Run 5 – 1,067 m. A single run of 1,067 m was conducted over a period of 14 minutes. Without relying on magnetometers or external aids, the system determined heading using its built-in gyrocompassing procedure, measuring the Earth’s rotation to establish true north. It then navigated a 1 km course with just 1 meter of error, demonstrating its capability for rapid deployment in the most challenging and unfamiliar terrain. See results in FIGURE 4.
FIGURE 4 3D navigation trace of the entirely underground run. The test traversed a total distance of 1,067 m, with a measured final error of 1.03 ±0.02 m, yielding an error per distance traveled of 0.093%.
While additional testing was planned to further validate the results, time constraints limited this study to a single test. The findings provide a representative indication of system performance under the tested conditions. TABLE 1 shows a comparison to GNSS navigation.
TABLE 1 Indicative industry-reported positional accuracy of GNSS compared to the Hybrid Navigation System.
Scalable Autonomy
While mines will continue to use fixed infrastructure, this technology significantly reduces dependency, enabling resilient, high-precision navigation in previously inaccessible or unmapped areas. This performance marks a step change in underground navigation, unlocking new potential for fleet management, predictive collision avoidance, material tracking and scalable autonomy across mining operations.
“At Normet, we specialize in advanced solutions for underground mining and tunneling, so we know firsthand how difficult accurate and reliable navigation can be in these environments,” Mylläri said. “Seeing Advanced Navigation’s Hybrid Navigation System deliver consistent positioning with minimal infrastructure deep within the Pyhäsalmi Mine was remarkable. It’s a powerful step forward for automation and safety in the underground space.”
In today’s dynamic operational environments, relying on a single navigation technology is no longer viable. Robust navigation demands a layered, inertial-first and multi-sensor architecture — held together by intelligent software — that can adapt and scale to meet the unique demands of each operation.
“Ultimately, this vehicle-based, inertial-centered architecture provides the resilient foundation required for the mining sector to achieve its long-term goal: efficient autonomous ore extraction at depths hostile to human activity,” Vandecar said.
“Unreliable navigation underground isn’t a minor technical constraint — it’s a major operational bottleneck,” said Joe Vandecar, senior product manager, Advanced Navigation. “Maintaining precision over a 22.9 km subterranean course in Europe’s deepest underground mine demonstrates a level of performance that few systems in the world can rival without any prior intelligence of the environment. These results prove we’re one step closer to unlocking scalable underground autonomy.”
The Hybrid Navigation System is set for commercial release later this year.
Adapted from a paper authored by Patrick Wiltshire, David McManus, James Spollard, Mark Gibson, Matthew Suntup, Tim Laws and Lyle Roberts. The full paper is available on the Advanced Navigation website (advancednavigation.com).
Precise positioning technology serves as the backbone of modern infrastructure and transportation systems worldwide. From the initial construction phases of major transportation projects to the daily movement of vehicles, goods and people, GNSS has become indispensable for ensuring safety, efficiency and accuracy.
Its importance becomes clear when examining projects such as Norway’s Rogfast Tunnel, where centimeter-level positioning accuracy — less than 2 cm — is essential for safe construction and operations. These integrated systems deliver the real-time, high-precision positioning that construction teams, fleet operators and transportation networks rely on each day.
However, this growing dependence on GNSS technology has created vulnerabilities in everyday transportation operations near war zones. A real-world ground transportation jamming and spoofing test in Haifa, israel, revealed how precision systems that enable critical operations can be disrupted, exposing a weakness for transportation in contested environments. As technology becomes more sophisticated and GPS-dependent, they paradoxically become more susceptible to electronic interference and accessible jamming and spoofing equipment.
In this cover story, we examine the full spectrum of GNSS applications in transportation — from the construction of subsea ground tunnels to smart fleet management systems, to operations seeking to defend ground vehicles against electronic warfare tactics.
The demand for efficient transportation systems extends beyond traditional development projects, such as subsea transportation tunnels or deployment scenarios where positioning technology delivers centimeter-level accuracy for fleet vehicles. In active conflict zones, positioning signals are more susceptible to jamming and spoofing, which disrupts civilians’ daily activities.
In the northern Israeli city of Haifa, after decades of relying on digital navigation, shopkeepers have started stocking paper maps again. The reason is not nostalgia, but survival in an age of electronic warfare.
The coastal city has become a testing ground for advanced GNSS technologies, where traditional satellite navigation systems regularly fail due to sophisticated spoofing attacks. These attacks not only disrupt military operations but also affect every smartphone, smartwatch and navigation device that relies on standard GPS signals.
Dror Meiri, business development and strategy advisor at oneNav, said that in Haifa, “You start driving. Everything is fine. You know that the drive is going to last for 37 minutes or so, and then all of a sudden, you lose your location.”
Researchers from oneNav conducted a comprehensive GPS resilience test in an active conflict zone near Haifa. The company’s mission was to compare how different navigation technologies perform when under electronic attack.
The Journey North
For the test, four devices were mounted side-by-side on a car dashboard: three leading smartphones and one device equipped with experimental L5-direct receiver technology. All four would make the same journey from south of Haifa toward the city center, passing through zones where GPS spoofing is known to occur.
The drive began in an area free from interference, where all devices accurately displayed their location in northern Israel. But as the car moved north toward Haifa, it entered what researchers describe as a “spoofed zone” — an area where military defense systems actively jam and spoof GPS signals.
While still physically driving through Haifa’s streets, the three commercial smartphones suddenly began displaying a location more than 100 km away in Beirut, Lebanon. A fitness smartwatch included in the test showed the same false location. Only the L5-direct enabled device maintained accuracy to within 1 m of the actual position.
The Technical Challenge
OneNav explains the vulnerability stems from the aging L1 GPS signal on which most consumer devices rely. First deployed decades ago, L1 signals are relatively easy to spoof with commercially available equipment. According to U.S. Federal Communications Commission (FCC) documentation, spoofing has become so prevalent that it affects devices across vast geographical areas; in some cases, every smartphone and smartwatch tested was spoofed across distances exceeding 120 km.
In response to the March 6 FCC inquiry on “Promoting the Development of Positioning, Navigation, and Timing Technologies and Solutions,” oneNav provided technical insights into spoofing vulnerabilities across different satellite navigation bands. The company explained that “spoofing in the L5 band will be much more difficult because the spoofing transmitter must have 10x wider bandwidth and 10x more precise spoofing correlator peaks to capture the L5 receiver. Spoofing transmitter power needs to be 20x higher in the L5 (GPS) band and 40x higher in the E5 band (Galileo) compared to spoofing L1C/A.”
This technical assessment highlights why the newer L5 signal represents a significant advancement in navigation security. The enhanced signal architecture, with its wider bandwidth and more sophisticated coding structure, creates substantial barriers for potential attackers. The exponentially higher power requirements — 20 times greater for GPS L5 and 40 times greater for Galileo E5 compared to legacy L1 signals — combined with the demanding technical specifications, make widespread L5 spoofing both technically challenging and prohibitively expensive for most threat actors.
Beyond the Battlefield
While Haifa’s situation is tied to regional security concerns, the implications extend far beyond conflict zones and affect autonomous vehicles, ride-sharing services, and logistics networks that have become essential infrastructure in modern cities.
“When I want to wait for a bus or public transportation, for gas or something like that, my phone tells me exactly where the bus is and how long it will take to reach the station,” Meiri said. “But the core system for that is the GPS, which is based on the bus, so the bus cannot send the right information to the server.”
Local businesses are grappling with the unreliable GPS environment. According to oneNav researchers, companies in the region — including one that uses drones to clean windows on Haifa’s skyscrapers — face significant operational challenges when their navigation systems are deceived into believing they are operating in a different country entirely.
Meiri, who conducted the oneNav test, notes the challenging conditions affecting transportation in Haifa could emerge in other urban areas as spoofing technology becomes more accessible.
The ground transportation implications are particularly concerning for emergency services. When 911 calls are placed in areas experiencing GPS spoofing, emergency responders may be directed to locations hundreds of kilometers from the actual emergency. This challenge has prompted regulatory discussions about upgrading emergency location accuracy requirements. Current GPS emergency location systems can achieve accuracy within 50 m in ideal conditions, but dense urban environments and electronic warfare zones significantly degrade this performance.
As spoofing technology proliferates beyond military applications, transportation systems worldwide may face the same navigational chaos currently seen in Haifa.
Industrial computing specialist Gateworks Corp. has developed a comprehensive solution that brings centimeter-level positioning accuracy to smart transportation.
Based in Vista, California, Gateworks specializes in industrial-grade single-board computers and wireless communication solutions for embedded systems, serving sectors including smart transportation, smart factories and railway systems.
Application developers working in smart transportation and industrial automation face increasing pressure to deliver solutions that combine high-precision GNSS positioning in variable outdoor environments with secure, low-latency wireless connectivity. The hardware must be rugged enough for harsh conditions while remaining compatible with diverse wireless standards.
Compliance and Reliability
Gateworks addressed these challenges by developing a modular, all-in-one evaluation platform and high-performance single-board computer development kit. The solution integrates u-blox ZED-F9P precision GNSS receivers, NINA-B301 Bluetooth Low Energy modules and Point One Navigation’s PointPerfect Flex GNSS correction services into one platform.
The core components include the GW16143, a Mini PCIe card that integrates the u-blox ZED-F9P receiver to deliver positioning accuracy of less than 2 cm. The complete GW7200 Development Kit combines the Venice single-board computer with the GW16143 card, GW16132 wireless module and a one-month trial of PointPerfect Flex correction services, along with all accessories needed for immediate evaluation.
This approach allows application developers to easily evaluate and deploy precise, real-time positioning and connectivity for smart transportation use cases without extensive integration work. PointPerfect Flex correction data eliminates the need for base stations while maintaining centimeter-level accuracy, which can be particularly valuable for fleet tracking, rail monitoring, health and safety applications, and autonomous vehicle systems. The wireless connectivity ensures correction data reaches GNSS receivers in real-time, enabling continuous high-precision positioning even in remote locations where cellular coverage is available.
Safety Across Sectors
Modern fleet safety systems leverage Gateworks single-board computers to enable edge artificial intelligence processing that analyzes driver behavior and road conditions directly on the device. Modern fleet safety systems leverage Gateworks single-board computers to perform edge artificial intelligence processing, which analyzes driver behavior and road conditions directly on the device. This approach can lower latency compared to cloud-based systems and offers instant alerts for drivers and fleet managers to quickly respond to unsafe driving behaviors. alert mechanisms for drivers and fleet managers to promptly address unsafe driving practices.
Process data in real time boosts driver safety through proactive monitoring. This results in fewer accidents and lower costs, while also helping compliance with transportation rules. Fleet operators notice notable improvements in safety performance and operational efficiency when they adopt edge-based monitoring systems.
In the rail industry, Gateworks single-board computers facilitate continuous infrastructure health monitoring through connected sensors that assess track conditions, vibrations and environmental factors. The systems also enable real-time location tracking of maintenance-of-way crews to ensure safety and efficient deployment of personnel. According to Gateworks, operators particularly value the enhanced coordination and safety benefits for on-site personnel working in potentially hazardous environments.
Norway’s geography presents persistent transportation challenges. The country’s complex network of fjords, islands and mountainous terrain forces travelers to rely heavily on ferry systems and intricate routes that can significantly extend travel times between major population centers.
Norway is building an underwater tunnel, one of Europe’s most ambitious engineering projects, which is expected to boost the country’s transport links and infrastructure. Project Rogfast is a 27 km tunnel that will run 392 m below sea level at its deepest point, connecting the cities of Stavanger, Haugesund and Bergen. Upon completion, it will be both the world’s longest and deepest road tunnel. The project is expected to reduce travel times between these major cities by approximately 50%, while eliminating dependence on weather-sensitive ferry connections.
“Traveling in Norway takes time. Efficient roads like Rogfast are crucial for progress,” said Trond Valeur, vice president of Skanska Norway.
Skanska serves as the primary contractor and is executing the project’s construction using a dual-approach method. Two separate teams are drilling and blasting from opposite ends of the tunnel route, with the objective of meeting in the center with a tolerance of 5 cm or less.
When describing the challenge, Rolf Christian Kværnæs, head of Geomatics at Skanska Norway, said, “It’s like two people sitting across from each other, blindfolded, trying to touch fingers.”
Why Precision Matters
The financial and environmental costs of measurement errors in tunnel construction are substantial. According to project data, a deviation of just 10 cm in drilling and blasting operations results in one to two additional truckloads of material removal per session.
“If we are 10 cm out of a lane, it will build up all the way down. It’s not sustainable or economical to do it twice,” said Anne Brit Moen, project manager at Skanska Norway.
This precision requirement has prompted the use of continuous monitoring systems that track, verify and record each construction phase to reduce rework. The strict accuracy standards for this type of construction pose considerable technical difficulties. Because underground environments block GPS signals, alternative measurement methods are necessary to ensure precision over the extensive length of tunnels.
Technology Integration in Extreme Environments
The surveying team at Skanska depends on Hexagon’s technology daily to ensure precision is up to 5 cm and minimize errors. Hexagon acts as Skanska’s “eyes” underground, without which projects like Rogfast would be impossible.
“Hexagon’s technology scans, checks and documents everything for us, so we know we don’t have to go back,” Valer said.
The surveying teams conduct 12 to 18 measurement scans daily using total stations and laser scanners provided by Hexagon. These instruments continuously monitor the tunnel’s alignment and document progress to ensure adherence to design specifications.
The Skanska team is using several Leica Geosystems surveying instruments, including the Leica TS60 and Leica MS60 MultiStation. The Leica TS60 serves as an accurate total station, specifically designed for demanding precision applications such as underground construction.
The Leica Nova MS60 MultiStation is a robotic total station that can measure points with an accuracy of 1 mm to 2 mm and capture 3D scans. This dual functionality combines traditional total station capabilities with integrated laser scanning, allowing the same instrument to perform both precise point measurements and comprehensive area documentation.
In the Rogfast project, these total stations serve as the primary positioning reference system. They establish control networks throughout the tunnel construction, providing fixed reference points from which all other measurements are taken. The robotic capabilities enable automated target tracking and measurement, reducing human error and increasing efficiency in the confined underground environment.
The hardware components work in conjunction with Hexagon’s data processing software, which manages the massive datasets generated by continuous scanning operations. Hexagon’s Geosystems division provides digital solutions that capture, measure and visualize the physical world, enabling data-driven transformation.
The software processes raw measurement data into actionable information, comparing actual construction progress against design models and generating reports that identify areas requiring correction. This integration allows project managers to make real-time decisions based on accurate spatial data.
Project Timeline and Scope
Project Rogfast represents one of several major infrastructure initiatives designed to improve transportation efficiency across Norway’s challenging terrain. The tunnel’s completion, set for 2033, seeks to establish new technical benchmarks for subsea construction while addressing long-standing regional transportation limitations in Norway.
Vatn Systems has released INStinct, an inertial navigation system (INS) designed to provide GPS-free navigation for maritime operations.
The defense technology company, which manufactures autonomous underwater vehicles (AUVs) for the U.S. military and commercial clients, said the system uses technology from ANELLO Photonics to deliver navigation capabilities in GPS-denied environments at lower cost than existing systems.
The system features a modular design that allows users to configure it based on mission requirements. It can be equipped with various inertial measurement units, including ANELLO’s X3 IMU, which uses Silicon Photonics Optical Gyroscope technology. The X3 IMU is designed to withstand shock and vibration in maritime conditions.
“Inertial navigation is the cornerstone of autonomy at sea,” said Nelson Mills, CEO and co-founder of Vatn Systems. “With INStinct, we’ve created a navigation solution that meets the needs of both our own vehicles and third-party platforms, offering reliability, accuracy, and adaptability. ANELLO’s IMU technology allows us to offer an INS with FOG performance at a fraction of the traditional cost. The launch of INStinct marks another milestone in our broader strategy to own the full tech stack for underwater vehicles.”
“The integration of our technology and our ANELLO X3 IMU into Vatn’s platforms and INS marks a pivotal advancement in our mission to transform autonomous underwater navigation,” said Dr. Mario Paniccia, CEO and co-founder of ANELLO Photonics.”Our technology has been rigorously field-tested across land, air, and sea environments, and we are thrilled to collaborate with Vatn to offer an underwater navigation solution. This partnership highlights our commitment to delivering next-generation navigation solutions that empower accurate and more efficient underwater operations.”
The system supports integration with Doppler velocity logs and includes maritime-specific algorithms. Housing configurations range from original equipment manufacturer specifications to depth-rated enclosures.
Vatn Systems said it plans to deliver vehicles equipped with INStinct to customers by the end of 2025.
University of Otago – Ōtākou Whakaihu Waka researchers have developed algorithms that improve the precision of location tracking in smartwatches.
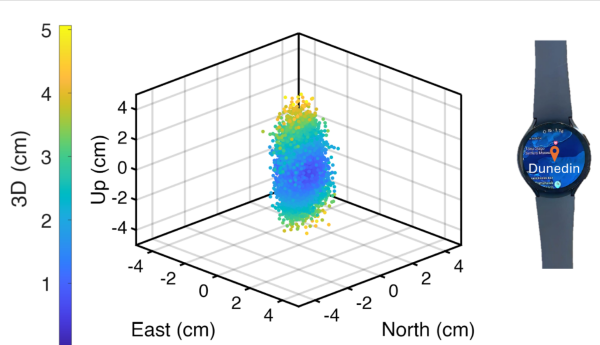
Led by Associate Professor Robert Odolinski, a visiting researcher with Google from Otago’s School of Surveying, the research team demonstrated that a smartwatch determined its location with centimeter-level precision over four hours with a stationary setup. The result was achieved by using the Google GnssLogger app and combining precise signals from several GNSSs.
The research was done in collaboration with Google’s Android Context group and the Chinese Academy of Sciences. Results are published in the scientific journal GPS Solutions.
For decades, achieving centimeter-level positioning has required industries such as surveying, construction and engineering to invest in expensive GPS equipment.
“While the use of the so-called carrier-phase signals has long been known to improve the positioning performance, the specialized antenna and receivers needed for this have traditionally come at a cost far beyond the reach of many who would benefit from the technology. This is just the beginning of what wearable high-precision positioning can potentially achieve.”
GPS was introduced in a wearable watch in 1999, but hardware and power consumption limitations prevented it from tracking the carrier-phase signals needed for high-precision results. Recent advances in smartwatches now make this possible.
Precise centimeter-level positioning on a smartwatch during 4 hours of data in Dunedin, New Zealand. The dots show the repeatability of one second of data in comparison to precise benchmark coordinates. The repeatability of the positioning is about 8 cm, at most twice as large as the smartwatch diameter of 4 cm (displayed to scale).
UAV Navigation-Grupo Oesía, a developer of flight control systems for UAVs, has completed integration and validation of ATMOSPHERE’s Iridium terminal into its VECTOR family of flight control computers. The integration was tested in flight conditions.
ATMOSPHERE’s Iridium terminal has been integrated into UAV Navigation-Grupo Oesía’s flight control system via RS-232 serial communication. The integration enables command and control beyond visual line of sight.
During flight tests, the communication link remained stable, with telemetry performance comparable to traditional radio systems.
The guidance, navigation and control system allows autonomous operation without requiring a control station link during flight. The integration supports two-way communication for mission updates and re-tasking. UAV Navigation-Grupo Oesía said the integration expands options for beyond visual line of sight operations.
The integration is part of the company’s effort to enhance operational capabilities for its clients. The system’s interoperability has been expanded to work with additional communication infrastructures and mission profiles. Iridium’s global coverage and low-latency service enable operators to maintain control of platforms in remote areas, over oceans or in environments where radio links may be unavailable.
The development applies to defense, security and industrial applications where beyond visual line of sight (BVLOS) operations require reliable communication. UAV Navigation-Grupo Oesía provides autonomous flight solutions.