Eos Positioning Systems (Eos) has become a member of the Municipal Information Systems Association (MISA) Canada’s National Partner Program (NPP). This collaboration aims to enhance the capabilities of Canadian municipalities in utilizing GNSS technology for improved mapping and asset management.
The partnership between Eos and MISA Canada facilitates the digital transformation of Canadian cities and towns by bringing together municipal leaders and technology innovators. Eos specializes in providing high-accuracy GNSS technology to local governments, enabling them to maintain critical infrastructure and public services more effectively.
Eos manufactures GNSS receivers in Canada that offer submeter to centimeter-level accuracy for GIS and mapping applications. These tools are particularly useful for utility and infrastructure mapping, public works asset management, environmental monitoring and planning and emergency response coordination.
The GNSS receivers from Eos are designed to integrate with existing GIS software and mobile devices, allowing field teams to efficiently collect, update, and manage spatial data with high precision. As part of MISA’s NPP, Eos will provide members with access to specialized solutions, training resources, and ongoing technical support to maximize the benefits of GNSS technology in municipal operations.
ANELLO Photonics has received a Phase I Small Business Innovation Research (SBIR) contract from the U.S. Navy. The six-month contract will allow ANELLO to demonstrate its optical gyroscope and sensor fusion technologies for navigation without relying on GPS.
Under the contract, the U.S. Navy will evaluate ANELLO’s integrated photonics technology and AI-based sensor fusion engine. These technologies aim to maintain accurate navigation in challenging environments where GPS signals may be unavailable or compromised.
ANELLO Photonics’ technology can be used for construction, agriculture, transportation, robotics, unmanned vehicles and national security. The company’s focus on navigation solutions for GPS-challenged scenarios aligns with growing needs in both military and civilian domains for reliable positioning systems in diverse environments.
In February 1991, two Russians joined this magazine’s Editorial Advisory Board: Nocolay Ivanov, Ph.D., research and development director of the USSR’s Institute for Space Device Engineering, and Gennady Gromov, Ph.D., chief designer general for the Leningrad-based All-Union Scientific Research Institute for Radio Equipment. Both were leading experts in GLONASS.
In October 1982, 4 1/2 years after the launch of the first GPS satellite, the Soviet Union had launched the first test satellite for its new constellation. It peaked in 1996, with more than two dozen operating satellites in orbit, then declined, hitting a nadir of just seven operational satellites in 2001.
Additionally, early GLONASS satellites were plagued by orbital failures and short lifetimes. Many observers wrote the system off as another victim of the economic and political disarray following the collapse of the Soviet Union. Then, the new Russian government reversed the trend by substantially increasing its funding for the program. By October 2011, the full orbital constellation of 24 satellites was restored. Next year, Russia plans to launch Glonass K-2, the latest generation of GLONASS satellites.
Following Russia’s invasion of Ukraine, however, much international scientific and technical cooperation with the country has been on hold. On April 8, 2022, the European Commission declared: “Following the Russian invasion against Ukraine and in solidarity with the people of Ukraine, the Commission has decided to suspend the cooperation with Russian entities in research, science and innovation.” Two months later, on June 11, 2022, the White House followed suit: “Consistent with U.S. domestic and international law, we will wind down institutional, administrative, funding, and personnel relationships and research collaborations in the fields of science and technology with Russian government-affiliated research institutions.”
By contrast, cooperation between the U.S. and European space agencies continues apace, as evidenced by a recent successful test of the interoperability of GPS and Galileo receivers.
Meanwhile, in 2024, China reached a total of 45 operational BeiDou satellites in orbit. It is also conducting research on BDS technology upgrades and technological trials for integration with low-Earth orbit PNT systems. It touts this, together with its active participation in the work of relevant United Nations bodies, as enhancing international collaboration.
At the latest two-day meeting of the National Space-Based Positioning, Navigation and Timing Advisory Board, in early December, much of the agenda was devoted to updates on international GNSS capabilities — including Japan’s QZSS and Korea’s KPS — and discussion of how GPS compares with the other global and regional navigation satellite system constellations.
Future GPS policies and budgets will depend largely on the choices made by the next U.S. administration.
War, international collaboration and the periodic changes in national perspectives and priorities brought about by elections contribute as much as scientific and technical research to the prospects of GNSS — this fantastic global utility that enables us, among other things, to track the movement of containers from Shanghai to Los Angeles, fly safely from New York to Paris and coordinate universal time across our planet.
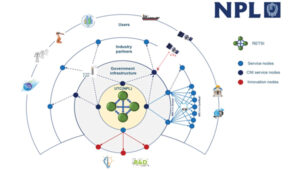
Saying the government must focus on “delivering an operational resilient positioning, navigation and timing (PNT) system for the United Kingdom as soon as we can,” the British Science Minister, Lord Patrick Vallance, announced several initiatives in his opening remarks to the Royal Institute of Navigation’s UK PNT Leadership Seminar on Nov. 20, 2024.
Among them was a funding increase for the National Physical Laboratory’s National Time Centre (NTC) project from £30 million ($38 million) to £62.7 million ($79 million) and a plan to have NTC and the first of the nation’s new eLoran towers at initial operating capability (IOC) by January of 2027.
Plans for all efforts beyond next year were necessarily “subject to spending review.”
Still, seminar attendees were gratified to hear the minister’s endorsement of the 10-point PNT policy framework published by the previous administration in 2023 and his commitment to operationalizing it with implemented systems.
Shabana Haque, Ph.D., head of the United Kingdom’s National PNT Office, also addressed the seminar and elaborated on the government’s actions to date and plans moving forward. She also discussed efforts toward developing quantum technologies and how all the capabilities would be incorporated into a coherent architecture.
Photo: RNT Foundation
Clocks
The United Kingdom recognizes time and timing as the most fundamental component of the PNT utility. Its NTC R&D program, run by the National Physical Laboratory (NPL), has been up and running since 2019. Its primary objective is to create “…a resilient UK national time infrastructure through the building and linking of a new atomic clock network distributed geographically in secure locations.”
Five years later, that program is coming to an end. Plans are in the works for the next phase of the NTC program, which includes developing a national timing infrastructure and supporting a new timing ecosystem — one that includes two-way satellite-time transfer (TWSTT), eLoran and the country’s legacy MSF radio time service. The industry will have a valuable role in the architecture of time distribution and providing value-added services while accessing highly resilient and well-authenticated core government time infrastructure.
As a result of NTC work to date, traceable time and frequency signals can now be accessed by industry and academia from three NPL nodes dispersed across the United Kingdom. They are at the University of Strathclyde in Scotland, the University of Cranfield in the Midlands and the University of Surrey in the south.
eLoran
eLoran also features prominently in the United Kingdom’s PNT plans. Britain operated Loran-C as part of the Northern European network until the end of 2015. For the last year of that, differential stations were deployed along the United Kingdom’s eastern coast and maritime operations based on eLoran were authorized.
On Jan. 1, 2015, and despite British pleas to the contrary, other northern European nations terminated Loran broadcasts in favor of Galileo. The United Kingdom has continued to operate its single eLoran transmitter as a national time signal. Plans call for additional transmitters to enable eLoran navigation across the nation and its adjacent waters within the next two years.
UrsaNav Loran monitor on Nautel equipment. (Photo: RNT Foundation)
The UK government has been working with several partners to advance its understanding and plan for the implementation of an eLoran capability. Haque highlighted work with the European Space Agency’s NAVISP program, resulting in the British company Roke developing an eLoran antenna for handheld devices.
She also discussed integrating the NTC’s clock and fiber network with eLoran signals and developing GNSS/eLoran receivers.
Many were particularly interested in an “eLoran Effectiveness Report” that the government commissioned and received from the General Lighthouse Authority’s Research and Development (GRAD) team. GRAD has extensive experience with the technology, having operated and evaluated the differential eLoran system along Great Britain’s east coast.
In a related move that helped signal the United Kingdom’s commitment to the technology, the Ministry of Defence issued a Request for Information (RFI) in September 2024 about a deployable eLoran capability. The RFI indicated that the document was a prelude to an acquisition.
Quantum research
The United Kingdom has invested more than £1 billion ($1.3 billion) into quantum research, which has the potential to contribute to PNT with better timekeeping and inertial and gravimetric sensing.
One aim of the quantum research program is to develop “…new navigation and timing systems to provide resilience and improved accuracy in the event of the denial of satellite systems.” A specific goal is to deploy quantum navigation systems, including clocks, on aircraft by 2030.
The program began in 2014 and has seen a significant increase in 2024 with the establishment of five quantum hubs nationwide. The hub at the University of Glasgow focuses on resilient PNT systems for national security and critical national infrastructure.
Policy and coordination
Minister Vallance and Haque also discussed two important non-technology themes.
The first was that the United Kingdom’s PNT office is fully funded, staffed, and very active. It was created last year as a cross-government effort and includes representation from the Ministry of Defence. In addition to pushing the nation’s PNT efforts forward, the office has been engaged with numerous other governments, including those of the United States, Canada, Australia, New Zealand, Europe, Japan and Korea.
USCG Loran tower circa 1995. (Photo: RNT Foundation)
Second, while the PNT initiatives are necessary for the nation’s resilience and security they will also be a source of economic benefits. This goes beyond enabling the British economy to function during local and potentially widespread GNSS disruption events. As the nation develops the technology stack to support its own resilient PNT architecture, along with enabling and supporting policies, resilient PNT devices and services will become marketable to others.
A sovereign PNT capability that can both stand on its own and cooperate with GNSS is becoming increasingly attractive to many nations. Being able to source such a capability from a respected and trusted ally such as Great Britain could make acquiring and implementing such a system much easier for many.
The UK Science Minister also praised the RIN’s work and publication of a series of tools to help explain PNT and the need for resilience to those outside the community. The tools also will help organizations evaluate their readiness for GNSS disruptions.
Available from the RIN’s Resilient PNT Portal, they are
A PNT explainer that outlines risks from over-dependence on GNSS and provides links to other informative resources.
A best practices “placemat” describing a “Prepare, Act, Recover” framework for PNT disruptions.
A PNT resilience checklist for organizations to use to self-evaluate their risk from GNSS disruptions.
The RIN recommends PNT experts use these tools working with customers, suppliers, and partners and act as a “guiding hand.”
The RIN sees these all as a “phase 1 release.” Feedback on the tools is encouraged and should be sent to [email protected]. The RIN team is eager to know what works and what could be improved, as well as to receive suggestions for other efforts.
As a “learned society,” the RIN has a significant influence on government policy and direction. This was recognized by Lord Vallance, saying, “The Royal Institute has played a really important role in recent years to highlight the PNT opportunity and risk, to provide expertise, and to work with government on solutions.”
The RIN’s director, John Pottle, and RIN Fellows Ramsey Faragher, Guy Buesnel and Andy Proctor were all recognized during the seminar for their contributions to the organization’s resilient PNT efforts.
UK leading the west
While China is in the final stages of establishing a nationwide clock system integrated with eLoran and signals from space, and South Korea is following suit, the United Kingdom seems to be the only Western nation in the process of establishing a coherent and resilient national PNT systems-of-systems architecture.
Some nations have substantial fiber timing networks, Europe seems to be on the path to a timing backbone, and the United States has three eLoran transmitters on air. However, none have announced the type of integrated plans the UK has published.
When asked about this, one UK PNT technology and policy expert opined that his nation is so far ahead of Europe and the United States because “we are unencumbered by having our own GNSS.”
His idea is that GNSS involves a lot of time, effort and money. The kind of financial and emotional commitments needed for these huge projects makes it hard for many to come to grips with the limitations and vulnerabilities of GNSS and the need to implement complementary systems. Both government officials and GNSS industry lobbyists may tend to resist such efforts, he said.
Concerning the UK government’s investment in OneNav, he said it is still possible that the United Kingdom might also pursue a space-based capability. Rather than establishing the capability on its own, in his opinion, the government will be much more likely to look for a commercial subscription service.
“We will access GNSS when we can trust it, and may pay for other signals from space,” he said. “But we want a sovereign capability for the United Kingdom, and the future of resilient PNT is terrestrial.”
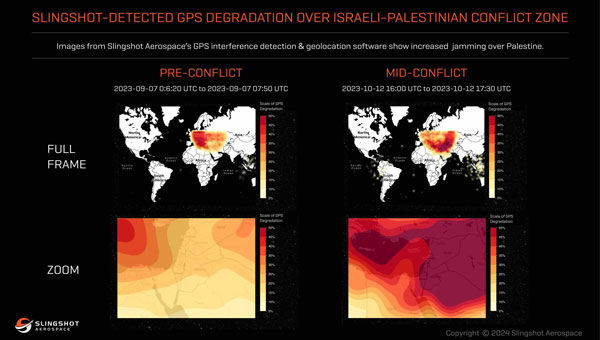
The U.S. Space Force’s Space Systems Command (SSC) has awarded a $1.9 million contract to Slingshot Aerospace to enhance its GPS jamming and spoofing detection capabilities. This contract, Positioning, Navigation and Timing – Secure Electronic Navigation Threat Intelligence and Location (PNT-SENTINEL), aims to improve the company’s existing technology by incorporating advanced artificial intelligence and predictive analytics.
The PNT-SENTINEL program builds upon Slingshot’s previous work under the Data Exploitation and Enhanced Processing (DEEP) contract, awarded in October 2021. The technology developed through DEEP currently assists the U.S. Space Force in detecting GPS jamming and ground-based interference sources related to ongoing conflicts, potential future conflict zones and counterterrorism efforts.
GPS spoofing and jamming pose significant threats to both military operations and civilian infrastructure. Such interference can impact a wide range of operations, including satellite systems, ground and air operations and critical services such as commercial airline operations and vehicle navigation. The global reliance on GNSS has increased the importance of protecting these signals from interference.
Slingshot’s technology utilizes a mesh network of thousands of satellites to create a near-real-time picture of GPS jamming occurrences worldwide. This space-based approach offers a more comprehensive view of global jamming conditions compared to traditional ground-based detection systems.
As part of the contract, Slingshot will integrate its AI model, Agatha, into the PNT-SENTINEL system. This integration aims to enhance the technology’s ability to detect and differentiate between unintentional interference and deliberate jamming or spoofing attempts. The improved system will also implement pattern recognition algorithms to identify active jamming events and predict how situations may evolve.
The contract also includes provisions for expanding the system’s capabilities to monitor interference across multiple GNSS sources, not just GPS. This multi-GNSS processing will allow for a more complete, real-time view of jamming activities by incorporating data from allied nations’ spacecraft.
The PNT-SENTINEL system is designed to be interoperable with existing military systems, enabling near-real-time information dissemination to support rapid decision-making in national security operations. These enhancements aim to provide warfighters with a strategic advantage in GPS-contested environments.
CHC Navigation (CHCNAV) has introduced the X500 rotor UAV, designed for precision aerial operations. It is ideal for surveying, urban monitoring, emergency response, disaster relief and infrastructure inspection.
Equipped with advanced navigation and safety features, the X500 rotor UAV meets the demands of professional operations. Dual GNSS and triple inertial measurement unit redundancy enhance positional accuracy and reliability, whereas integrated millimeter-wave radar provides precise obstacle detection. The drone’s video transmission system supports HD feeds over distances of up to 20 km, and its V-SLAM visual positioning ensures accuracy for tasks such as landing on moving platforms.
The X500 is designed to handle diverse payloads, with a capacity of up to 5 kg and flight durations of up to 58 minutes — or 50 minutes when equipped with the CHCNAV AA10 lidar system. Its open SDK and compatibility with the Mavlink protocol allows for seamless integration with both CHCNAV sensors and third-party equipment. Built for demanding conditions, the X500 features an IP55 rating and can operate in winds up to 12m/s.
The UAV features a new power system, enabling up to 58 minutes of flight time. According to CHCNAV, the BS10 charging station minimizes downtime by charging six batteries from 20% to 90% in just 40 minutes, while hot-swappable batteries ensure uninterrupted operations during extended missions.
Complementing the X500’s hardware is CHCNAV’s SmartGo ground control software, which simplifies mission planning and offers real-time flight monitoring. With various flight path options and beyond visual line of sight capabilities, SmartGo ensures safe, efficient operations while providing full control over mission parameters.
Mapbox and Hyundai AutoEver, a software affiliate of Hyundai Motor Group, have developed an integrated AI-driven 3D navigation system with advanced driver-assistance (ADAS) capabilities. This system, powered by Mapbox 3D Live Navigation and MapGPT, operates on Hyundai Mobis’ cockpit domain controller.
The Mapbox 3D Live Navigation system offers 3D lane-level guidance, augmented reality overlays and real-time driver assistance. It integrates Mapbox’s navigation technology with Hyundai AutoEver’s software-defined vehicle platform and Hyundai Mobis’ AR-enabled cockpit domain controller. This integration provides drivers with turn-by-turn navigation enhanced by ADAS alerts, including collision warnings and lane departure notifications.
MapGPT, an AI-powered location assistant, complements the navigation system. It facilitates voice-driven interactions for dynamic routing, real-time traffic updates and hyper-local search. The system also allows voice-activated controls for in-car functions such as climate control and music. For electric vehicles, MapGPT includes features such as real-time range monitoring and charging station recommendations.
At CES 2025, Mapbox and Hyundai AutoEver will demonstrate these technologies, showcasing features such as lane-level AR navigation, voice-controlled systems and electronic vehicle-specific tools.
At sunrise on Oct. 1, 2024, SL-15 launched into a perfectly clear blue sky over the desert from Spaceport America, in Las Cruces, New Mexico. The flight — conducted by UP Aerospace with support from NASA’s Flight Opportunities program — carried aloft the payloads and hopes of researchers from three countries — Italy, Germany and the United States — and ten organizations.
Spaceport America, the first commercial spaceport in the world, is an FAA-licensed launch complex. Situated on 18,000 acres adjacent to the U.S. Army White Sands Missile Range in southern New Mexico, it has a rocket-friendly environment of 6,000 square miles of restricted airspace, low population density, a 12,000 ft by 200 ft runway, vertical launch complexes and about 340 days of sunshine and low humidity.
UP Aerospace, a Denver-based company created in 1998, conducted its first suborbital flight from Spaceport America in 2006, which was also the inaugural flight from the spaceport. UP Aerospace maintains a launch complex, a payload processing center and a space propulsion center at the spaceport. Its launch operations and SpaceLoft suborbital launch vehicle were designed and built as a reliable, low-cost Reusable Launch Vehicle (RLV) system.
NASA’s Flight Opportunities program rapidly demonstrates technologies developed by industry, academia, as well as NASA and other government scientists through testing with various commercial flight providers. The program matures capabilities needed for NASA missions and commercial applications while strategically investing in the growth of the U.S. commercial space industry. Available flight platforms include suborbital rockets, rocket-powered landers, aircraft flying parabolic profiles to achieve reduced gravity, high-altitude balloons, and hosted orbital vehicles.
Interoperability test
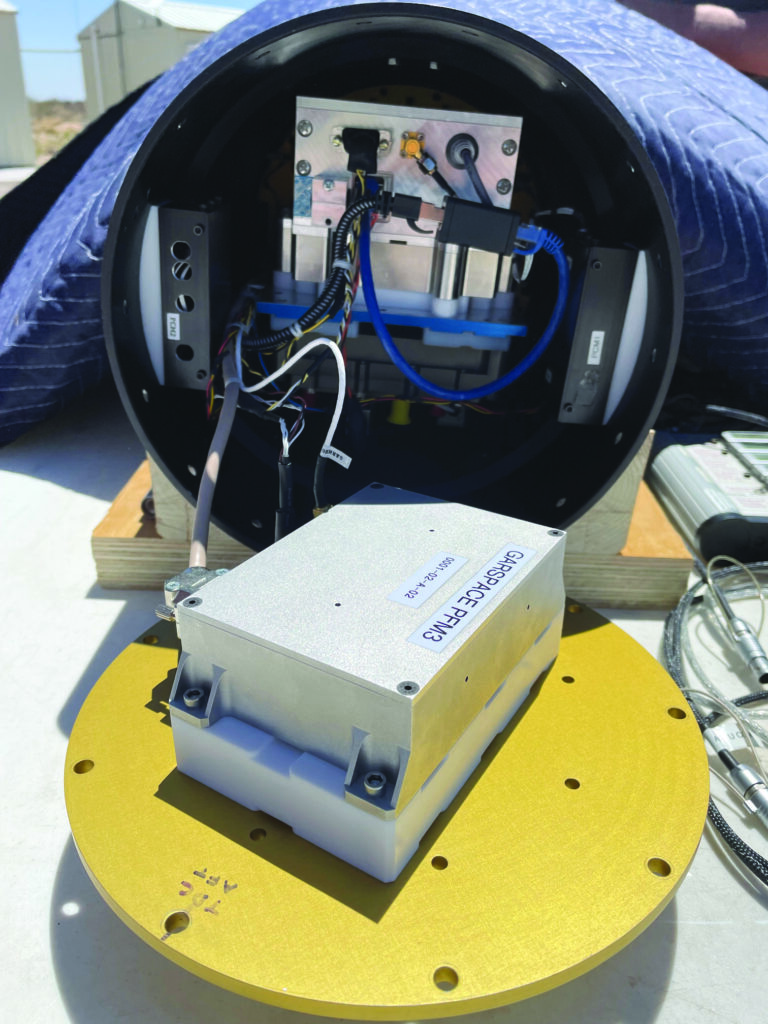
One of the payloads carried to suborbital heights by the SL-15 rocket was a suite of multi-GNSS receivers from NASA’s Space Communications and Navigation (SCaN) program, the European Space Agency (ESA) / European Space Operations Centre (ESOC), the Italian Space Agency (Agenzia Spaziale Italiana or ASI), and their contractors Fraunhofer (a German, publicly owned research and development organization) and Qascom (a private Italian engineering company offering security solutions in satellite navigation and space cybersecurity). A key goal of the flight test was to determine the scope of the interoperability of these receivers. The full results of the test will be presented at the intercessional meeting of the International Committee on GNSS (ICG), a part of the United Nations Committee for the Peaceful Uses of Outer Space (COPUOS) in Vienna in June 2025.
One of the other payloads on the flight was an experiment by the New Mexico Institute of Mining and Technology — aka New Mexico Tech — on spacecraft health monitoring and real-time systems built by the company Immortal Data, which also tested out and collected environmental data on some of its own equipment as it relates to product development. Another payload was an advanced prototype Automatic Dependent Surveillance-Broadcast (ADS-B) transmitter that could potentially be used for independent, low-cost tracking of space launch vehicles.
Lisa Valencia, an electrical engineer for Overlook Systems Technologies, Inc. and NASA’s SCaN Program at NASA Headquarters, was the program manager for the SCaN payload mission. In November 2019, SL-14 tested NASA’s Autonomous Flight Termination Unit as well as Qascom’s GNSS signal recorder. Oscar Pozzobon, co-founder, president, and CEO of Qascom, was able to post-process the data collected by the recorder. SL-15 was originally planned to launch in November 2022; however, it was scrubbed due to interference between the launch vehicle’s S-band transmitter and the L-band GNSS receiver on board. In May 2023, the original SL-15 booster was used for SL-17, a mission carrying student payloads, which experienced an anomaly, ending the flight test three seconds after launch. Therefore, Valencia, her team, and the other teams involved were elated when the October 2024 launch was successful.
Building on the success of the previous SL-14 launch, the SL-15 mission to fly two GPS-Galileo receivers on a sounding rocket is the result of an agreement between NASA, ASI and ESA. The primary objective was to assess GPS-Galileo performance in a highly dynamic environment. The secondary objective was to have the GNSS receivers integrated with the avionics on board the vehicle, with the aim to test the real time use of PVT available during the flight, in contrast to post processing on SL-14. This allowed the evaluation for operational use of multi-constellation / multi-frequencies GNSS for Autonomous Flight Termination Systems (AFTS). AFTS is an independent launch vehicle subsystem designed for range safety operations. From 2014 to 2019, Valencia was the project manager for AFTS in the Engineering Directorate at NASA’s Kennedy Space Center.
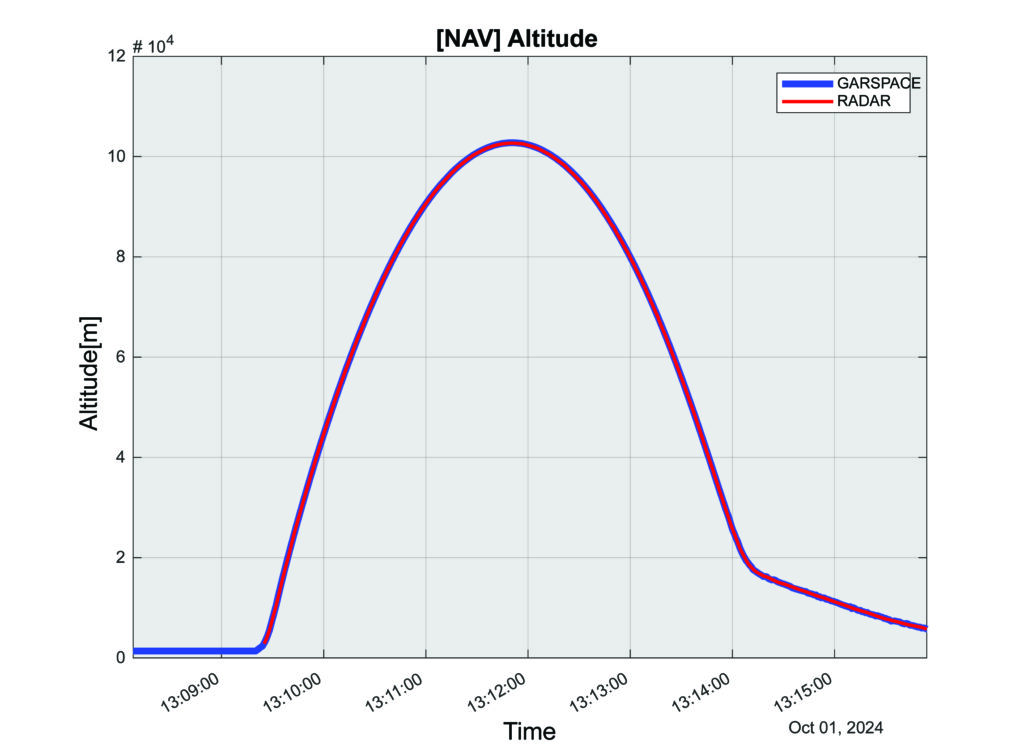
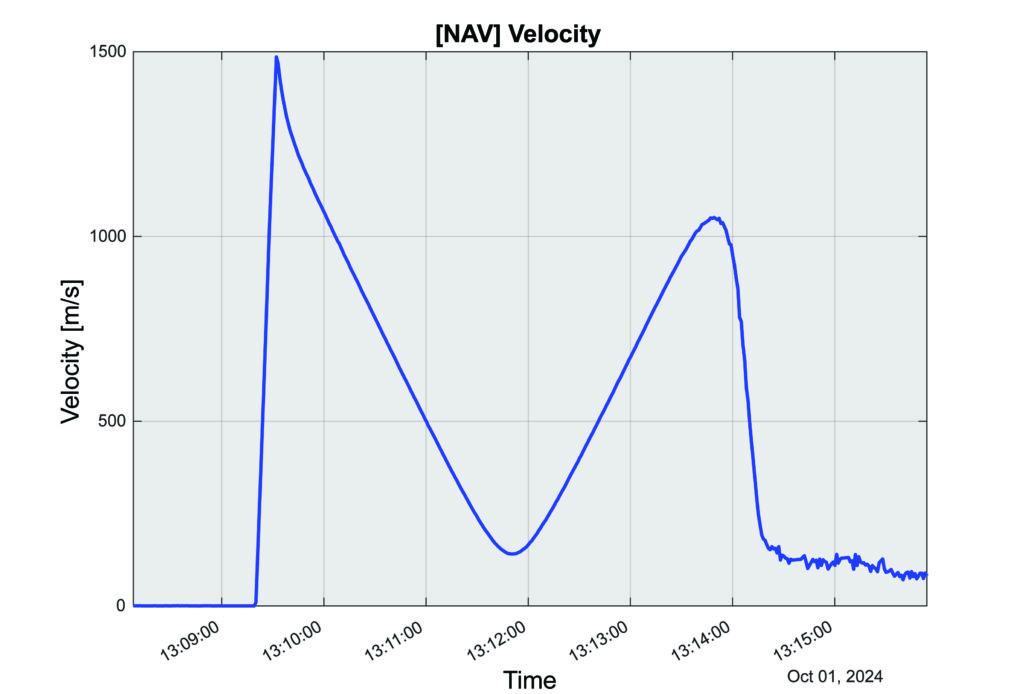
The interoperability experiment on the SL-15 mission included two Autonomous Flight Termination Units (AFTU) and two GPS-Galileo receivers utilizing the L1/E1/L5/E5a signals: a GNSS Dual Frequency / Dual Constellation QN400-SPACE receiver for GPS-GALILEO Receiver for Human Exploration & Operations (GARHEO) program of ASI and Qascom, and a GNSS Receiver with Open Software Interface (GOOSE) receiver from ESA/ESOC and Fraunhofer; as well as a JAVAD GPS L1 receiver. During the flight, a 12-second launch and boost phase was followed by ascent coasting until the rocket reached apogee at an altitude of 115 km, followed by descent, re-entry, and landing, for a total flight duration of 13 minutes. The rocket reached a maximum speed of 1400 m/s, a maximum acceleration of 13.5 G, and a maximum spin rate of 7 Hz.
The NASA sponsor for the GNSS Payload mission is James J. Miller, Executive Director of the National Space-based Positioning, Navigation, and Timing (PNT) Advisory Board with the SCaN Program. The team members are:
NASA: James J. Miller, Lisa Valencia, Hubert Chang, Paul De León, Anh N. Nguyen
ASI:Giancarlo Varacalli, Claudia Facchinetti, Mario Musmeci
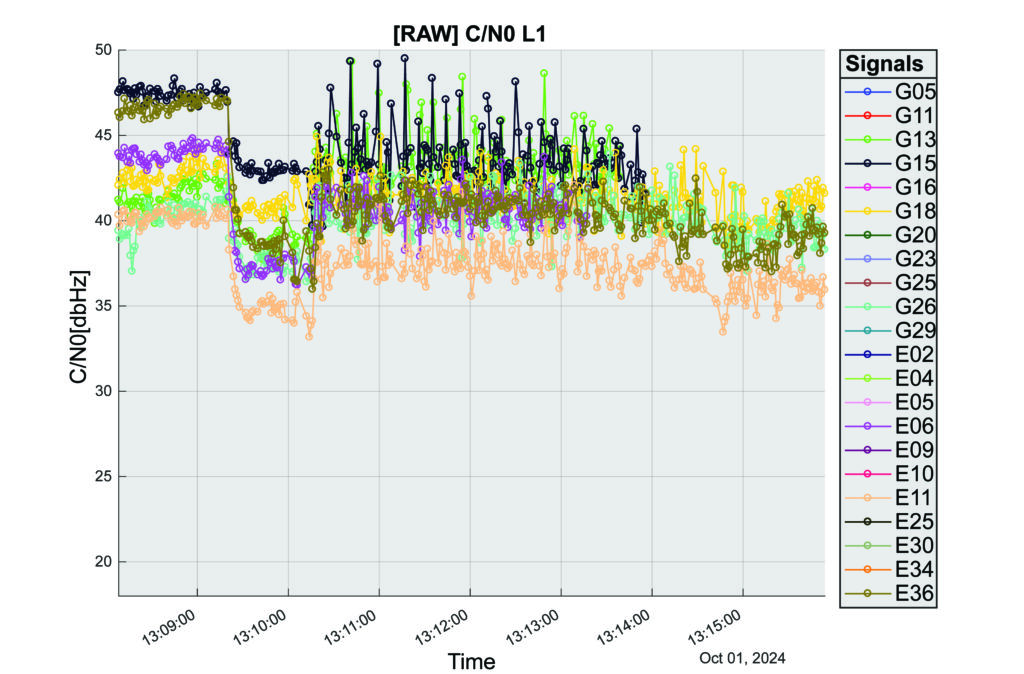
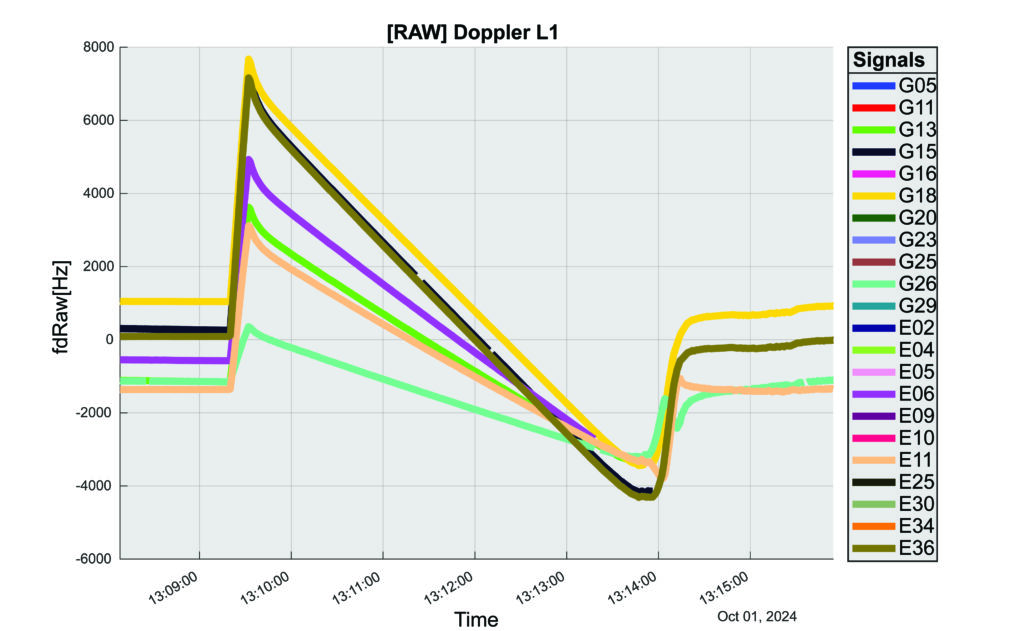
During this highly dynamic flight, all GNSS receivers successfully tracked, with high accuracy, based on position, velocity and time (PVT) solutions, meeting the interoperability payload objectives of dual constellation (GPS and Galileo) and dual frequency (L1/E1 and L5/E5a) compatibility.
One plot of the rocket’s altitude changes over time produced from the data collected is striking: a blue line representing the data from the GARHEO and a red one representing data from a monitoring radar on the ground overlap perfectly, resulting in a single purple line on the graph.
During a launch, space vehicles rely on GNSS signals for tracking, monitoring, and safety. Their ability to receive signals from multiple GNSS constellations would offer launch vehicles more precise and reliable real-time PVT information. The SL-15 GNSS experiment demonstrated the benefits of interoperability between Galileo and GPS in highly dynamic environments.
The next step will be a detailed analysis of the data collected during the flight. ESA/ESOC’s next steps will be to process the data from the GOOSE receiver taken on-board and to apply different concepts and algorithms in order to achieve the highest possible accuracy for the SL-15 flight trajectory. Among them will also be a Precise Point Positioning (PPP) GNSS technique that utilizes the GOOSE receiver data in combination with precise orbits and clocks for Galileo and GPS, which will be calculated by ESOC’s Precise Navigation System (EPNS) software. Results are expected in early 2025. ASI/Qascom’s next steps include utilizing the data collected by the SL15 experiment to support the development and validation of the new generation of high dynamics GNSS receivers providing enhanced robustness against GNSS threats. This is the main objective of Qascom’s receiver. At least one launch vehicle is planning to incorporate a multi-GNSS (GPS + Galileo) receiver into their AFTS.
Quotes
“The success of SL-15 is the result of a multi-year collaborative effort with the Italian Space Agency (ASI) and the European Space Agency (ESA) to develop multi-GNSS capabilities to improve resilience for space users. The multi-national SL-15 team worked extremely well together to overcome many challenges, leading to a successful mission. The successful launch of SL-15 was particularly rewarding to our international team in light of the numerous delays we had due to export control restrictions, high winds at the launch site, and key personnel catching COVID-19 during pre-launch checkout. These delays, however, gave us time to resolve payload interference issues identified during one of the launch preparations as well as have our payload reassigned from a rocket with a faulty engine that ended up failing on another mission (SL-17).”
— Lisa Valencia
“The key benefit of this mission was validating our ability to track both GPS & Galileo signals under the highly dynamic conditions of a sounding rocket launch. These included an initial acceleration to 14G (or 14 times the gravitational acceleration on Earth’s surface), a 7 Hz spin rate (seven spins every second), and a maximum speed more than 1400 m/s (3,132 mph).”
— A.J. Ora, Ph.D.
“The integration of GPS+Galileo for high-dynamic space applications will most certainly continue opening up more operational scenarios as GNSS signals become more available and resilient in the sparse and challenging space domain. The use of additional GNSS signals to augment GPS is developing rapidly and is a cornerstone of strengthening international collaboration as called for in Space Policy Directive-7 (SPD-7). NASA is therefore a proud contributor in helping to develop navigation tools that will benefit all space sector users as more knowledge is gained and adopted.”
— James Miller
“UP Aerospace appreciates the opportunity to work with NASA and the vast array of customers they serve. We have partnered in many successful launch campaigns. It can be challenging to integrate so many different payloads into one vehicle, but we are excited at the success of SL-15. Launching rockets is a risky business and sometimes anomalies can occur. The key is to learn from each launch and incorporate the lessons-learned into subsequent flights, ensuring their success.”
NASA and the Italian Space Agency (ASI) are collaborating on the Lunar GNSS Receiver Experiment (LuGRE), which seeks to demonstrate the viability of providing positioning, navigation and timing capabilities on the moon using GPS and Galileo signals.
LuGRE’s payload consists of a weak-signal GNSS receiver, a high-gain L-band patch antenna, a low-noise amplifier and an RF filter. The receiver is designed to track GPS L1 C/A and L5 signals, as well as Galileo E1 and E5a signals. It will collect pseudorange, carrier phase and Doppler measurements, calculate onboard navigation solutions, and have the capability to record raw I/Q baseband samples for ground processing.
NASA‘s Space Communications and Navigation (SCaN) Program office funded and oversaw the experiment. It was selected as one of ten research and technology demonstrations for lunar surface delivery by Firefly Aerospace, under NASA’s Commercial Lunar Payload Services (CLPS) initiative.
LuGRE builds upon previous missions in the Space Service Volume, including experiments by AMSAT-OSCAR 40, GOES-R series satellites and the NASA Magnetospheric Multiscale mission. It aims to be one of the first demonstrations of GNSS signal reception and navigation in the lunar environment, potentially paving the way for operational use in future lunar missions.
The target launch date for the Blue Ghost 1 mission carrying LuGRE is Jan. 15, 2025. Upon completion, all LuGRE science data will be made available to the public for the benefit of the GNSS and space communities.
John Deere has introduced the second generation of its autonomy kit, which integrates advanced computer vision, AI and camera technology to enhance machine navigation in various environments. This development comes in response to widespread labor shortages across multiple industries, the company said at CES 2025.
The agricultural sector faces a significant challenge, with the American Farm Bureau Federation estimating that approximately 2.4 million farm jobs must be filled annually. Similarly, the construction industry struggles with labor shortages, with 88% of contractors reporting difficulties finding skilled workers. The commercial landscaping sector is also affected, with 86% of business owners struggling to fill open positions.
“Our agriculture, construction and commercial landscaping customers all have work that must get done at certain times of the day and year, yet there is not enough available and skilled labor to do the work,” said Jahmy Hindman, chief technology officer at John Deere. “Autonomy can help address this challenge. That’s why we’re extending our technology stack to enable more machines to operate safely and autonomously in unique and complex environments. This will not only benefit our customers but all of us who rely on them to provide the food, fuel, fiber, infrastructure and landscaping care that we depend on every day.”
New autonomy kit
The new autonomy kit is being implemented across various machines, including the 9RX tractor for large-scale agriculture, the 5ML orchard tractor for air blast spraying, the 460 P-Tier autonomous articulated dump truck for quarry operations and an autonomous battery electric mower for commercial landscaping. These machines feature advanced camera systems, lidar sensors and improved depth calculation capabilities, allowing for more efficient and precise operations.
John Deere offers multiple adoption paths for users, with select machines being autonomy-ready from the factory and retrofit kits available for certain existing machines. The autonomous machines are managed through the John Deere Operations Center Mobile, a cloud-based platform that allows users to control and monitor the machines remotely, access live video and data and receive notifications about job quality or machine health issues.
HERE Technologies and Amazon Web Services (AWS) have entered a cloud infrastructure agreement aimed at advancing the development of software-defined vehicles (SDVs). This partnership combines HERE’s mapping solutions with AWS technologies to accelerate the creation of advanced driver assistance systems (ADAS), automated driving (AD) and new digital car experiences.
The collaboration leverages HERE’s expertise in location technology and AWS’s cloud capabilities to address the growing importance of live mapping in modern vehicles. These data-intensive operations can now be supported and scaled more efficiently using AWS, potentially reducing development times and accelerating innovation in the automotive industry.
HERE has been utilizing AWS for its core cloud infrastructure, data platform and AI/ML model deployment for nearly a decade. This expanded collaboration allows HERE to offer automakers a comprehensive set of cloud-native tools and technologies, enhancing various aspects of vehicle functionality, from improved active safety features to optimized infotainment systems.
Key developments
A key development from this partnership is SceneXtract, a solution that streamlines the process of creating simulation-ready scenes for testing ADAS and AD systems. By combining HERE HD Live Map data with AWS’s natural language processing and generative AI services, automotive developers can more efficiently prepare simulations, potentially accelerating the development and deployment of advanced driving technologies.
Beyond the automotive sector, HERE and AWS are collaborating on transportation and logistics solutions. These new offerings, built on AWS infrastructure, aim to help enterprise customers optimize fulfillment, improve supply chain visibility, and support sustainability goals.
Iran is in the process of initial field testing of a new drone aircraft carrier — the Shahid Bagheri — a converted container ship.
Featuring an angled flight deck and ski-jump ramp, the ship seems well-equipped to launch large drones. Two additional drone-carrier vessels, the Shahid Mahdavi and Shahid Roudaki, have also been spotted during sea trials alongside this latest member of the Iranian Shahed drone-carrier fleet.
The objective seems to enable Iran to extend its drone attack capabilities across the Gulf, which is likely to concern Israel, the United States, and their allies. Nevertheless, the drone-carrier vessels do not appear to possess advanced defense systems, nor are they accompanied by destroyers or equivalent support. As such, they may be highly vulnerable to drone attacks.
In 2004, the UK launched the Watchkeeper drone program, led by Thales UK and Elbit Systems through their joint venture, U-TacS. The program was contracted for £700 million ($852 million), with the first flight expected in 2006. It centered around the Elbit Hermes 450 drone with substantial modifications. The 2006 date slipped significantly as costs climbed through 2010, and authorization for military training only happened in 2014. However, the rollout for operational use was still delayed. During those initial tests, one in seven drones crashed in circumstances often associated with bad weather — not good for a drone designed and intended for all-weather operations. The trials were moved to locations with better weather conditions.
Initially featuring limited surveillance and target acquisition capabilities, the Watchkeeper WK450 drone has been enhanced with upgrades that include synthetic aperture radar and ground-moving target indication, in addition to its original electro-optical/infrared sensor.
Watchkeeper flight in April 2013. (Photo: UK MOD)
The drone was used for English Channel patrol and for some uncontested airspace surveillance and targeting missions in Afghanistan. It was most recently fielded in NATO exercises in Estonia, flying in different weather conditions to verify airspace deconfliction and interoperability with Estonian air traffic control.
Unfortunately, program delays, which have sometimes been associated with over 1000 additional UK requirements during the development cycle, difficulties in training, cost growth from the original £700 to an ultimate program cost of £1.35 billion ($1.64 billion), along with obsolescence brought on by the years of delays — these have all now doomed the Watchkeeper drone program to retirement, which the UK recently announced.
Watchkeeper drones were eventually priced at $5.2 million each for a quantity of 45 to 54, for a task which today’s drones, costing maybe $30 thousand, are much more capable. A fate also perhaps brought on by the fantastic rate of evolution for today’s commercial drones versus the well-trodden, somewhat lengthy path of mil-spec development programs.
The US Air Force has established an advanced technology test area at Eglin Air Force Base (AFB) — the Autonomy, Data and AI Experimentation Proving Ground. Near Earth Autonomy (NEA) recently worked with Eglin to demonstrate the capabilities of its Griff 135 multicopter drone and its autonomous avoidance capability.
NEA has developed avoidance and autonomous navigation capability, which allows its drones to fly beyond visual lines of sight by knowing their location with respect to the environment around them. With optical and electronic sensors, the drone builds a point-cloud image of its surroundings on a separate computer from that which manages its autonomous behavior. The two systems interact to provide autonomous flight, including obstacle avoidance, take-off and landing, and, in several cases, the delivery of special cargo, such as blood and medical samples.
In the case of the Eglin tests, the objective was for the Griff 135 to interact with a Service-Malory TRV-150 cargo drone operated by the 413th Flight Test Squadron. Now, we have a four-rotor cargo drone capable of carrying 150 lb of cargo and an eight-foot quadcopter capable of destroying each other in a potential collision. First, they are independent; one is manually operated, and the other has an autonomous capability. But who knows if it can see, detect, and avoid another fast-moving drone in the same airspace? So, the flight test had the two crossing paths to verify, detect, and avoid by NEA drone. Two flight sessions and the Griff-135 did a good job seeing, computing and executing multiple avoidance maneuvers.
NAE UAV. (Photo: NAE)
NAE was awarded a NASA Small Business Innovation Research grant for its autonomous aircraft inspection technology. Before a flight departs, one of the crew members inspects the aircraft, checking flight controls, lift surfaces, and tires for any damage or issues that could impact the upcoming flight or need maintenance later. Engineering personnel also conduct visual inspections, though perhaps not for every flight, to frequently verify the aircraft’s integrity.
NAE has collaborated with NASA and Boeing to create autonomous software that allows their drone to conduct a thorough visual inspection of aircraft. The FAA mandates an inspection card outlining the requirements and the specific path around the aircraft for inspections. NAE has integrated these requirements into its drone, resulting in an automated inspection process that captures a high volume of detailed photographs from every part of the aircraft. This automated system completes inspections in approximately 30 minutes, in contrast to manual inspections, which can take up to four hours. The system is reportedly progressing toward the commercialization stage.