Ag Leader has launched RightPath, a passive implement steering solution, to alleviate issues in precision agriculture resulting from drift.
Putting the right seed in the right location with the right fertilizer is critical for farmers, and has led to the wide adoption of technology such as autosteer. However, if the pass-to-pass accuracy isn’t perfect at planting, the crop is vulnerable to damage in subsequent passes, which drags down yield.
Trailed implements are known for drifting off the guidance line even when farmers use autosteer. The result is inaccurate placement of inputs and inconsistent guess rows. This is an issue because accuracy drives yield.
RightPath is designed to operate seamlessly through Ag Leader’s InCommand Go displays. (Image: Ag Leader)
A passive implement steering solution, RightPath keeps implements centered on the guidance line. This not only ensures precise input placement but also increases operational efficiency throughout the growing season, while minimizing crop damage, yield loss, and operator challenges.
RightPath enables farmers to:
place the implement — and therefore rows and inputs — in the right place.
plant seed accurately relative to a previous operation such as strip-till or NH3.
achieve consistent guess rows in all conditions including curves and uneven terrain.
re-use the same guidance line in the next field activity.
reduce stress and fatigue.
RightPath is designed to operate seamlessly through Ag Leader’s InCommand Go displays. In addition, RightPath is compatible with both SteerCommand Z2 and SteadySteer, Ag Leader’s integrated and assisted steering solutions.
While both the vehicle and implement require Ag Leader’s GPS 7500 to utilize RightPath, only the vehicle needs to be equipped with TerraStar-C, TerraStar-L or RTK. This gives an operator the flexibility to choose the right GPS correction for different operational needs.
RightPath is available now through a single purchase unlock, with no recurring subscription fee.
BDStar Navigation subsidiary TruePoint has introduced the TruePoint.CM network real-time kinematic (NRTK) service across Europe, the latest in BDStar’s expansion into international high-precision positioning markets.
Supporting all major GNSS and QZSS, the service is designed to improve signal reliability in complex European environments. TruePoint.CM is built on the company’s chip-cloud integration architecture and works with both BDStar’s Unicore and third-party GNSS hardware through standards-based interfaces.
The service provides wide-area coverage throughout Europe, the company said, offering centimeter-level accuracy with fast convergence times. Before launch, TruePoint conducted extensive validation testing in more than 40 cities across 12 European countries, including more than 300,000 kilometres of dynamic field trials.
The platform uses an adaptive data protocol to reduce bandwidth consumption by up to 70% while maintaining full positioning accuracy, a feature aimed at helping customers reduce operational data costs. Remote diagnostics and over-the-air firmware updates are incorporated to support more efficient device management in the field.
TruePoint.CM operates on a fully redundant cloud infrastructure spanning data sources, data centers and service-delivery interfaces. The system is designed to ensure continuous uptime, backed by a stated service availability of 99.9%.
At launch, the company reported that it has already secured commercial adoption in the European robotic lawn mower market, with additional opportunities expected in autonomous robotics, UAVs, precision agriculture, automotive and consumer IoT.
Swift Navigation and Asensing have announced full compatibility between the Asensing NAV3120 high-precision GNSS positioning module and Swift’s Skylark Precise Positioning Service. Skylark is a cloud-based service that improves the accuracy of GNSS from several meters to a few centimeters.
The widespread deployment of connected and autonomous IoT systems — including smart delivery robots, UAVs, precision agriculture and logistics — demands reliable, centimeter-level positioning that performs consistently across diverse environments and at scale.
Swift’s Skylark Nx RTK, the highest precision variant of Skylark, leverages a proprietary atmospheric model to deliver continuous 1-2 cm accuracy across vast geographic areas, including Western Europe. The carrier-grade network eliminates the need for developers to manage base stations or switch between multiple correction providers, simplifying the deployment of high-precision outdoor robots at scale.
The seamless interoperability between Skylark Nx RTK and Asensing’s NAV3120 module provides customers with a highly reliable, centimeter-accurate solution packaged in a compact, automotive-qualified hardware module. Joint testing demonstrated this high performance, with the solution achieving a sustained 1.7 cm horizontal position error at 95% confidence during a 24-hour period, which significantly accelerates time-to-market for applications requiring the highest level of positioning integrity.
The NAV3120 is full-constellation and quad-frequency signal reception module engineered for demanding applications. Features include:
Automotive-grade. Complies with AEC-Q100 standards for integrated circuits used in automotive applications.
Extreme operating range. Sustains temperatures from -40°C to +105°C.
Compact design. Small size and standard 17 x 22 x 3.1 mm footprint, weighing only 2g.
Efficient power. Low power consumption of just 0.4W.
The integrated solution is available now for use for autonomous mobile robots, UAVs, fleet management, advanced handhelds and wearables, and precision agriculture.
My September GPS World newsletter highlighted the new California Spatial Reference Network, labeled CSRN Epoch 2025.00. These coordinate changes will impact geospatial users across California, and understanding the transition process is important for preparing for the modernized National Spatial Reference System (NSRS), expected to be adopted in 2026.
CSRC, founded in 1997 and formally dedicated in 2001, develops and maintains a modern network of GPS control stations to provide a reliable spatial reference system for California. Created as a partnership of surveyors, engineers, GIS professionals, the National Geodetic Survey (NGS), Caltrans, and the geodetic and geophysical communities, the CSRC’s mission is to produce a self-sustaining, up-to-date geodetic control network for the state.
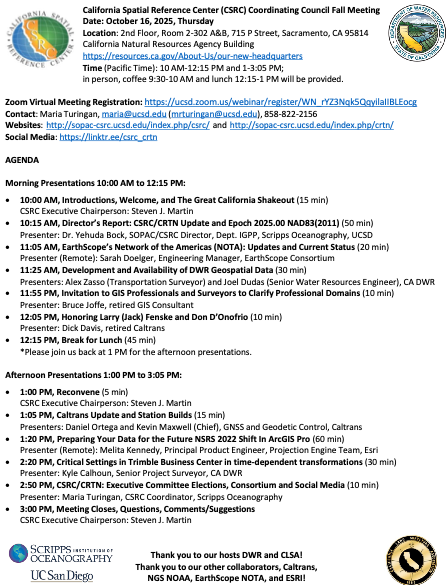
The CSRC holds Coordinating Council meetings to review CSRC activities and related state surveying and mapping efforts. The box titled “CSRC Coordinating Council 2025 Fall Meeting” lists the agenda for the most recent meeting. I attend these meetings virtually; they are consistently informative and I enjoy participating.
Image: CSRS website
Dr. Yehuda Bock’s Director’s Report (SOPAC/CSRC Director, Dept. IGPP, Scripps Oceanography, UCSD) is available for download from the CSRC website: http://sopac-csrc.ucsd.edu/index.php/csrc-presentations/ (note: large file). At the Fall Coordinating Council Meeting Yehuda opened with a presentation on the new California Spatial Reference Network, CSRN Epoch 2025.00. I encourage readers to download the presentation or read my September GPS World newsletter, which highlighted CSRN Epoch 2025.00. This newsletter will focus on the Geodetic Program at Scripps Institution of Oceanography (SIO).
Image: CSRC website
In my November 2023 GPS World newsletter, I noted NGS’s announcement of the NOAA FY23 Geospatial Modeling Competition awardees. In my March 2024 GPS World newsletter, I highlighted Scripps Institution of Oceanography’s (SIO) proposal. As noted there, Yehuda’s proposal included three activities:
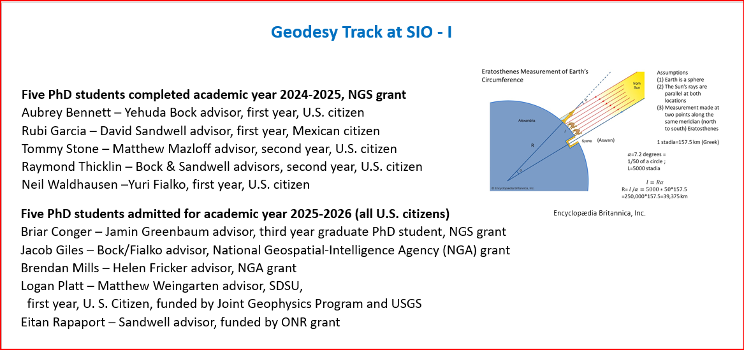
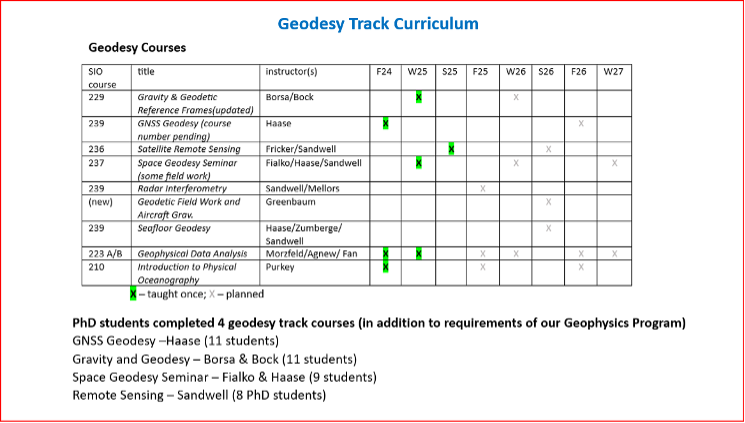
Create a formal Geodesy Program at SIO to address the nationwide deficiency of geodesists. Expand current geophysics curriculum – funding for five graduate students.
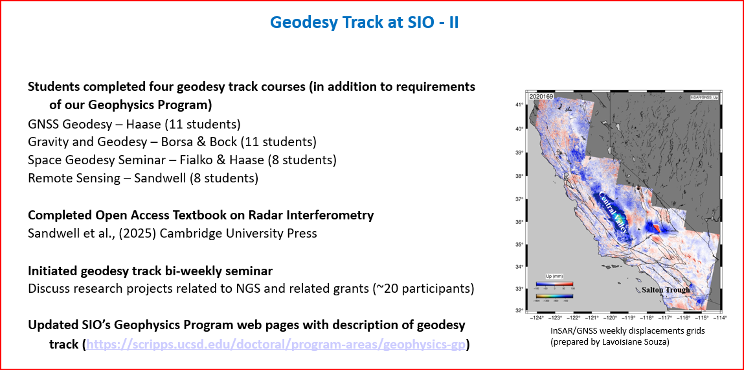
Develop an IFDM to supplement the NSRS for users in regions with significant ground motions, using GNSS and InSAR/GNSS displacement fields (funded by NASA projects) and underlying geophysical models. CSRC will exercise the IFDM through its community of public, private and academic users of precise spatial referencing in our challenging region of secular and transient crustal movements.
Investigate a unified vertical reference frame, including a marine geoid optimized to be consistent with the full spectrum of observations from modern gravimetric geoids (e.g., GRAV-D, ICGEM), remotely sensed observations (e.g., SWOT, ICESat-2), in situ ocean observations and assimilating ocean models and the TRF.
As mentioned in the Director’s report, they have initiated bi-weekly geodesy track seminars to discuss research projects related to NGS and other grants. Four videos by students discussing their projects were shown during Yehuda’s presentation.
The following are the titles and presenters of the four research projects:
San Jacinto Fault Zone by Neil Waldhausen
Probing Antarctic basal ice state using airborne geodesy by Briar Conger
Repeat Pass Interferometry by Rubi Garcia Gonzalez
Hydrologic monitoring with GRACE/GRACE-FO by Logan Platt
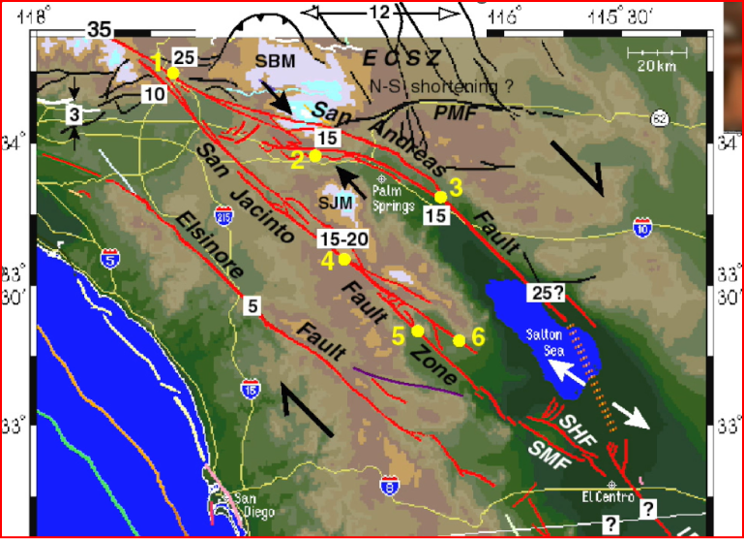
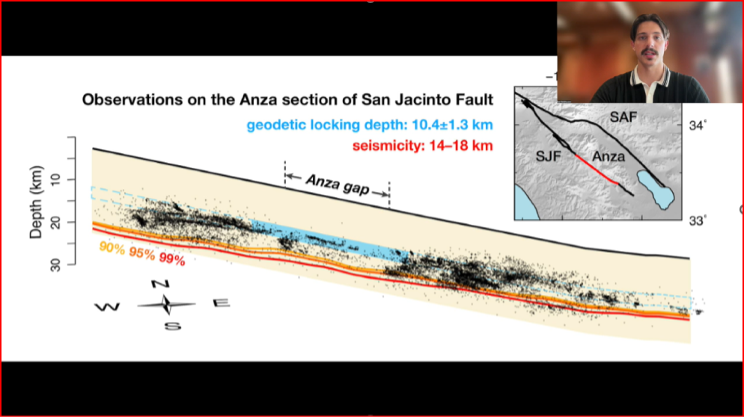
San Jacinto Fault Zone by Neil Waldhausen
I have included a few bullets summarizing their project and a few captured images from the videos. I would encourage everyone to download the presentation to listen to the short videos by these students. The presentations are only 90 seconds but are very interesting. Readers can contact the speakers through the University to find out more about their research.
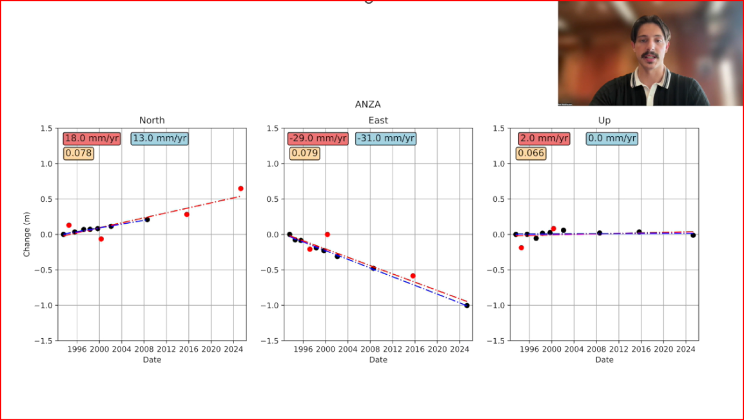
Summary of the “San Jacinto Fault Zone” video:
Neil uses GNSS to measure velocities and strain rates around the San Jacinto Fault.
He focused on the Anza gap, a 20-km segment of the fault.
He re-surveyed about 50 monuments that had been occupied over past decades.
His work has lowered uncertainties in many site velocity measurements.
His aim is to further reduce uncertainties in strain-rate and slip-rate estimates to better understand the Anza gap’s mechanics.
San Jacinto Fault Zone by Neil Waldhausen.San Jacinto Fault Zone by Neil Waldhausen.Image: CSRC website
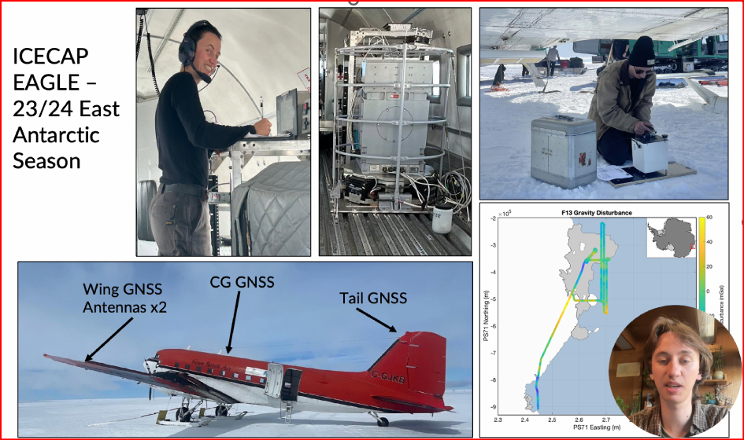
Summary of the “Probing Antarctic Basal Ice State Using Airborne Geodesy” video:
Briar’s project uses gravity and radar data to study basal hydrology — water flow beneath glaciers and ice sheets, including subglacial lakes, channels, and pressure-driven water movement.
He conducted fieldwork on the East Antarctic Ice Sheet during the 2023–24 season.
He collected airborne gravity and GNSS data from a converted DC-3 aircraft.
Data processing uses both PPP and differential positioning methods.
His aim is to improve long-term sea-level rise predictions.
He is also developing a fixed-wing UAV capable of collecting lidar, gravity, and photogrammetry data.
Probing Antarctic Basal Ice State Using Airborne Geodesy by Briar Conger
Probing Antarctic Basal Ice State Using Airborne Geodesy by Briar Conger.Image: CSRC website
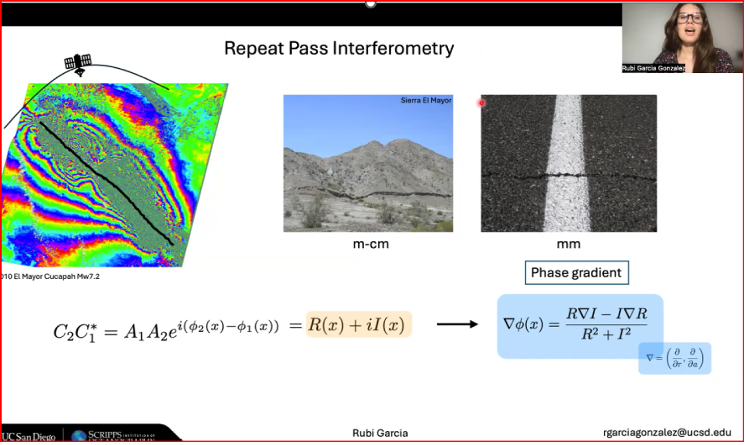
Summary of the “Repeat Pass Interferometry” video:
Rubi used repeat-pass interferometry (phase gradient) to map small-scale surface deformation.
The phase gradient is the change in interferometric phase between neighboring pixels; unlike the ambiguous single-pixel phase (wrapped within 2π), the gradient gives a continuous local rate of change useful for analysis.
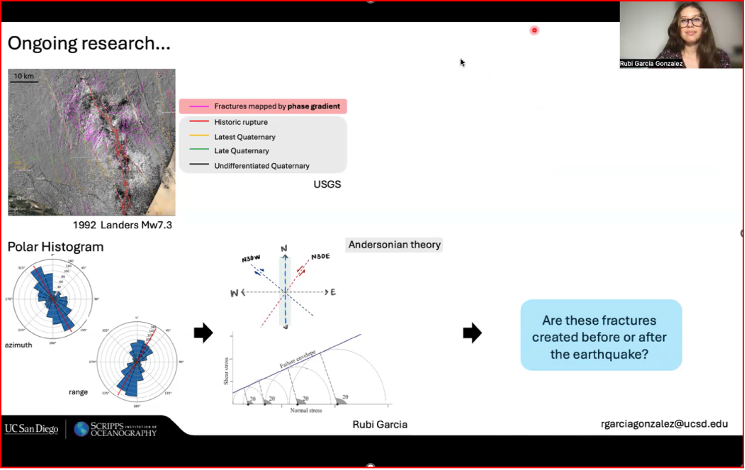
She compared fractures identified by phase-gradient analyses with historic fracture databases.
Her ongoing work includes applying Andersonian faulting theory to assess whether fractures formed before or after earthquakes.
Andersonian faulting (Anderson’s theory of faulting) is a geological framework for interpreting crustal stress and fault geometry; it’s used to interpret InSAR-measured deformation. While not a method of analysis for InSAR data itself, it serves as a critical interpretive tool for understanding the ground deformation patterns measured by InSAR.
Repeat Pass Interferometry by Rubi Garcia Gonzalez
Repeat Pass Interferometry by Rubi Garcia Gonzalez.Image: CSRC website
Summary of the “Hydrologic monitoring with GRACE/GRACE-FO” video:
Logan described using satellite measurements of tiny changes in Earth’s gravity to track mass movement and better understand groundwater and the water cycle.
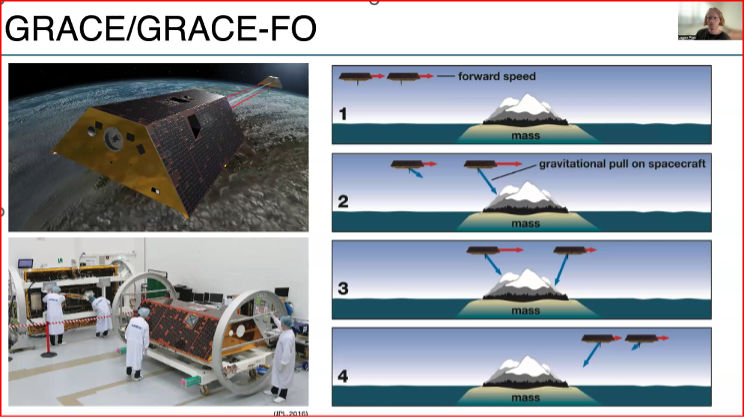
He relied on GRACE and GRACE-FO data.
The Gravity Recovery and Climate Experiment (GRACE) and its successor mission, GRACE-Follow On (GRACE-FO), are Earth-observation missions that use twin satellites to precisely map changes in Earth’s gravity field over time. This unique method allows scientists to track the movement of mass, primarily water, around the planet
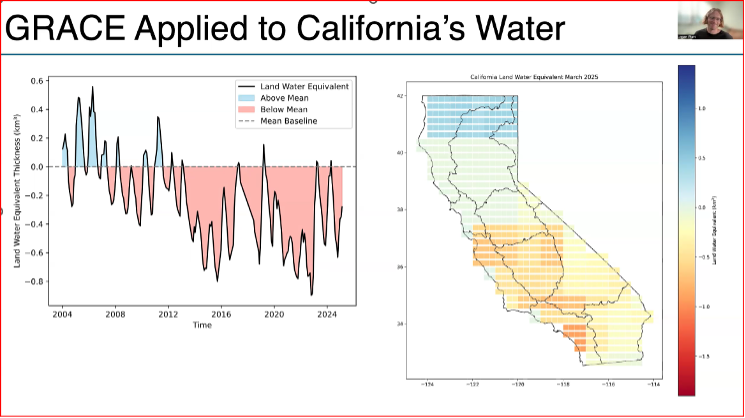
He used the GRACE data to look at changes in California’s Water storage from 2004 to 2024.
Results indicate a decline due to drought and heavy ground water usage, with more water being stored in northern California than southern California.
This research supports water management, climate-change impact assessment, and strategies for sustainable groundwater use.
Hydrologic Monitoring with GRACE/GRACE-FO by Logan Platt
Hydrologic Monitoring with GRACE/GRACE-FO by Logan Platt.Hydrologic Monitoring with GRACE/GRACE-FO by Logan Platt.Image: CSRC website
A new InSAR textbook, authored by several internationally recognized researchers, was also announced. Funded by the National Geodetic Survey and published Open Access, the book is available for free download. It’s a large file, but anyone working with InSAR data should obtain a copy.
New InSAR Textbook
Image: CSRC website
Table of Contents of New InSAR Textbook
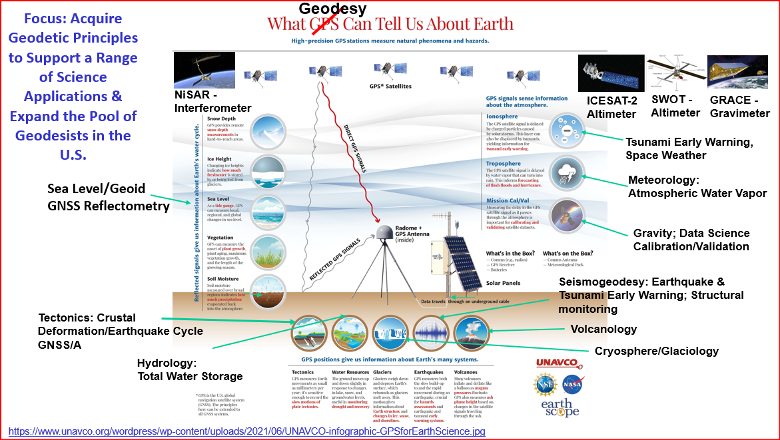
If you’ve read my newsletters, you know I’m passionate about advancing geodesy. I wanted to share one of Yehuda’s slides, “What Geodesy Can Tell Us About Earth,” because the four students are working on projects tied to real-world problems. The slide highlights geodesy’s importance and the many professions that rely on its findings.
What geodesy can tell us about Earth. (Image: CSRC website)
The new FLIR TransponderTech unit will advance GNSS, AIS and VDES technologies for maritime, aerospace and defense markets.
Teledyne Technologies has completed its acquisition of the TransponderTech business from Saab AB. The acquired company, now operating as Teledyne FLIR TransponderTech AB, will become part of Teledyne’s Raymarine, FLIR Marine, ChartWorld and Teledyne CARIS group of maritime technology brands.
Based outside of Linköping, Sweden, the company will market its products and solutions as FLIR TransponderTech. The brand will continue to focus on delivering GNSS, Automatic Identification System (AIS) and VHF Data Exchange System (VDES) technologies.
Going forward, FLIR TransponderTech will be well positioned to continue to pioneer maritime communication solutions for civil and military customers in shipping, marine traffic, airborne and space segments.
Raytheon UK, part of RTX’s Raytheon business, has been awarded a contract to provide orbital analysts in support of the UK’s Space Domain Awareness mission.
Under the contract, the UK Space Agency will gain access to Raytheon UK’s NORSSTrack software, which enhances orbital analysis and operational responsiveness by mapping and tracking satellites, monitoring potential collisions and debris, assessing re-entries and providing critical data for decision-making.
The analysts will be based at a National Space Operations Centre facility at Royal Air Force Base High Wycombe.
As highlighted in the UK’s Strategic Defence Review, space domain awareness is central to protecting critical space assets and strengthening resilience across government, defense and industry. It is considered a vital national capability, ensuring the UK can operate safely, securely and confidently in an increasingly contested space environment.
Accurate localization underpins modern mobility, powering everything from precise rideshare pickups and efficient deliveries to augmented reality and autonomous systems. Yet achieving reliable sub-meter precision with commodity hardware remains one of the field’s central challenges.
A range of technologies are being explored to improve positioning, such as real-time kinematic (RTK) and Precise Point Positioning (PPP) corrections, 5G methods standardized under the 3rd Generation Partnership Project (3GPP), simultaneous localization and mapping (SLAM), light detection and ranging (lidar), inertial measurement units (IMUs), and ultra-wideband (UWB). Each plays a role in specific contexts, but for everyday, mass-market deployment, two paradigms dominate the conversation: visual positioning systems (VPS), which rely on cameras and computer vision to match images against reference databases, and GNSS plus inertial measurement unit (GNSS+IMU) sensor fusion, which integrates satellite positioning with inertial data already present in billions of devices.
These two approaches are not mutually exclusive. VPS works best in dense urban areas where GNSS can struggle, while GNSS+IMU excels in the open environments where VPS has fewer features to recognize. In practice, VPS even depends on GNSS to help narrow the search space in its visual database. That makes the two technologies natural complements, and together they provide the building blocks for the next generation of spatial intelligence.
The Role of VPS
VPS use computer vision to determine position relative to known landmarks. In favorable environments – especially dense, feature-rich urban settings — they can deliver impressive accuracy. VPS has been successfully applied in AR anchoring, pedestrian navigation, and even some indoor mapping, offering a level of precision that is difficult to match with GNSS alone.
At the same time, VPS faces challenges that limit its ability to scale as a standalone universal solution. Maintaining vast libraries of reference imagery requires constant collection and refreshing, even for companies with resources such as Google’s Street View. Keeping cameras active and running neural network matching consumes power and compute, with AR and navigation apps often showing rapid battery drain when vision pipelines are engaged.
Performance can also be fragile, with accuracy dropping in low light, bad weather, or environments with limited features such as open fields or glass-heavy corridors where reflections distort recognition. Because VPS requires continuous camera use, it also raises privacy concerns under regulations like GDPR.
But VPS still fills an important feature set: it works best in exactly the environments where GNSS struggles most. In dense urban areas with abundant visual features but heavy multi-path interference, VPS provides a complementary capability that enhances overall localization performance when paired with GNSS+IMU.
GNSS+IMU Fusion
GNSS provides global reach, but smartphone accuracy typically ranges from 3m to 5 m. This may be adequate for turn-by-turn navigation, but it does not meet the precision required for lane-level guidance, pedestrian navigation or building entrances. Pairing GNSS with IMU data changes that equation by adding orientation and motion context.
Sensor fusion combines GNSS position (x, y, z) with IMU-derived orientation (α, β, γ) to deliver six degrees of freedom (6DoF). In practice, this allows devices to determine not only where they are, but also which way they are facing, which is critical for navigation and AR anchoring.
Another key advantage is that fusion also runs efficiently on-device, using low-power sensors already embedded in nearly every phone. It avoids the battery drain and compute overhead of vision-based methods, remains resilient in poor visibility, and largely sidesteps the privacy concerns associated with continuous camera use.
Together, GNSS+IMU and VPS offer complementary strengths: GNSS+IMU provides scalable global coverage, while VPS adds value in dense urban or visually rich environments. Used in tandem, they extend reliable sub-meter localization across a far wider range of real-world scenarios.
Performance in Field Tests
Independent field testing has underscored the impact of GNSS+IMU fusion in real-world conditions. In trials conducted in Louisville, Colorado, standard smartphones relying solely on GNSS averaged ~1.9 meters of error. When collaborative corrections and IMU fusion were added, mean error dropped to ~0.55 meters – a more than threefold improvement.
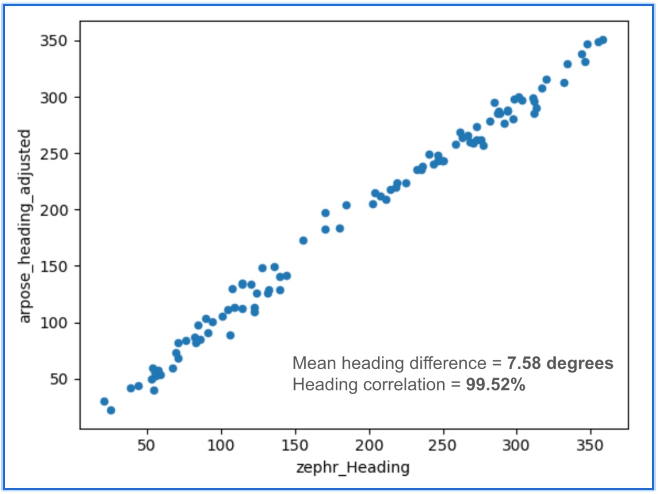
To benchmark localization performance against visual methods, we compared heading determination from Zephr’s sensor-based approach with Google’s VPS, widely considered an industry leader in vision-based localization. Using the same device and location, headings generated from ArPose and Zephr were plotted against VPS outputs.
Figure 1: The figure shows a strong correlation, with a mean heading difference of just 7.58° and a heading correlation of 99.52%.
The results in Figure 1 show a strong correlation, with a mean heading difference of just 7.58 degrees and a heading correlation of 99.52%. This provides a useful benchmark, illustrating that sensor-based approaches can achieve heading accuracy on par with vision-based systems while avoiding the data, compute, and privacy burdens tied to continuous camera use.
Head-to-Head Comparison
When considered side by side, VPS and GNSS+IMU reveal distinct strengths. VPS delivers high accuracy in dense urban environments, where GNSS can be degraded by multipath or blockage. GNSS+IMU, meanwhile, provides consistent global coverage and efficient performance in open environments where VPS has fewer features to recognize. Taken together, they form a complementary toolset, with each addressing the other’s gaps.
Cost & Infrastructure: VPS offers detailed visual positioning but requires continuous investment in capturing and updating reference imagery, which can run into petabytes of data and demand large-scale cloud storage. GNSS+IMU leverages existing satellite constellations and commodity sensors already embedded in smartphones, scaling naturally without additional infrastructure.
Battery & Compute: VPS enables precise landmark recognition but must keep cameras active and process high-resolution frames, a pipeline that consumes energy and compute. GNSS+IMU fuses lightweight sensor readings on-device, sustaining real-time performance with minimal power. Hybrid systems can use VPS selectively for visual anchors when power budgets allow.
Environmental Robustness: VPS excels in dense urban cores where landmarks are abundant, but its performance can degrade in low light, heavy weather, or feature-poor settings such as highways or open fields. GNSS+IMU continues to perform in most outdoor environments, with IMUs bridging short GNSS gaps in tunnels or urban canyons. Together, they extend reliable coverage across diverse conditions.
Privacy: VPS provides visual context but depends on continuous camera feeds, which can raise concerns under regulations like GDPR and CCPA. GNSS+IMU relies solely on inertial and satellite data, which can be anonymized and processed on-device. Privacy-conscious applications may favor GNSS+IMU as the default, while invoking VPS in controlled contexts.
Scalability: VPS delivers strong results in mapped geographies but is constrained by the cost of collecting and maintaining visual data globally. GNSS+IMU scales as more devices ship with standard GNSS receivers and inertial sensors, with accuracy improving further when devices contribute corrections to a shared network. In combination, VPS can add value in high-density urban corridors where visual richness offsets its infrastructure demands.
Beyond Accuracy: Spatial Intelligence Without Cameras
GNSS+IMU fusion not only narrows positioning error but also provides contextual awareness. By combining positional vectors with device orientation, systems can determine not just where a device is, but what lies within its field of view.
This contextual layer enables landmark-aware navigation and natural AI interactions. Instead of vague coordinates, users could be guided to “meet at the blue mailbox next to the coffee shop entrance.” In AR, digital content can be anchored to the physical world without the overhead of vision-based methods. And for AI interfaces, assistants could answer spatial queries (“Is the restaurant to my right or left?”) with precision that feels intuitive.
While GNSS+IMU avoids reliance on cameras, VPS can still add complementary value by providing visual anchors in feature-rich spaces. Used together, the two methods create a more resilient and adaptive localization system, able to support a wider range of real-world scenarios than either could alone.
A Clearer Path Forward
VPS has proven valuable in research, robotics, and AR demonstrations, particularly in dense urban environments. But its reliance on imagery, heavy compute, and continuous camera use makes it difficult to scale as a universal solution for sub-meter accuracy.
To unlock the next generation of spatially intelligent applications, from context-aware assistants to immersive AR, localization must be both practical and massively scalable. This foundation will come from GNSS+IMU sensor fusion, complemented by vision-based methods where they add value. GNSS+IMU builds on infrastructure and sensors already present in billions of devices, delivers efficient on-device performance, and avoids the privacy tradeoffs of camera-based systems.
As positioning becomes the backbone of spatial AI, the evidence points to a decisive outcome: the future will be multimodal, but the scalable backbone will be GNSS+IMU fusion since it empowers devices to understand and interact with the world reliably, with or without cameras.
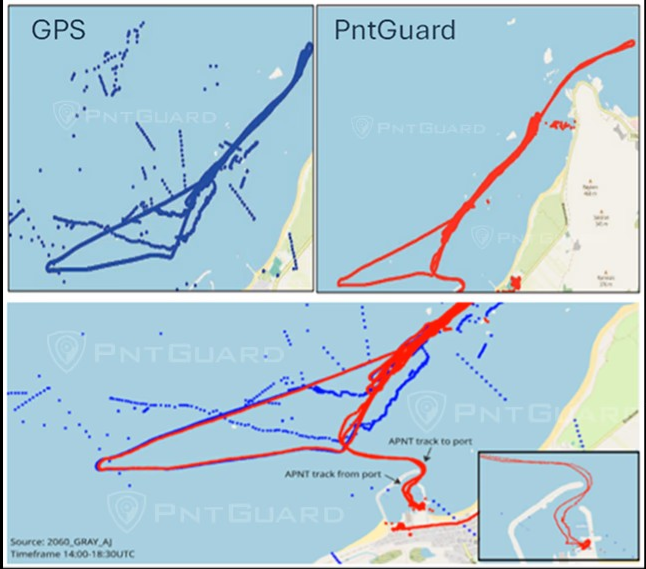
Tschudi Shipping Company, NAL Research and SGM Technology AS have launched PntGuard, a maritime-security solution that provides pinpoint situational awareness. It supports navigational integrity at a time when GNSS signals can no longer be taken for granted.
standalone navigational aid independent of all other bridge systems, PntGuard delivers instant alerts the moment a vessel’s position is falsified, providing true position data when other bridge systems are compromised.
The electronic warfare problem
Malicious disruption of GNSS signals is increasing for the maritime industry. Attacks can originate from land-based systems, hostile or “dark-fleet” vessels, or even occur opportunistically in congested sea lanes – often without vessel crews ever realising their position has been manipulated.
Critical scenarios include:
Collisions and groundings (especially in low visibility, at night, and in dense traffic zones with risk to life, assets, and the environment)
Unintended or manipulated entry into restricted waters
Claims of sanctions evasion / calling at ports in sanctioned states
ort delays / disruptions to cargo logistics including deviations causing delays, increased fuel consumption, and emissions.
Charter disputes and insurance challenges when a vessel appears to have breached compliance boundaries
Enabled by the Iridium low-Earth orbit (LEO) satellite network, PntGuardreceives a secured PNT signal about 1,000 times more powerful than GNSS and is resilient to jamming and spoofing of those systems. The solution complements a vessel’s navigation feed with accurate situational awareness and immediately alerts the crew to manipulation or interruption, its makers say.
PntGuardcomprises two compact components – an above-deck unit (receiver) that connects to the Iridium PNT service and a below-deck unit (bridge display) that shows both the falsified GPS track and the vessel’s true position on a nautical chart in real time.
Shore offices can also receive an accurate record of a vessel’s true position at any time – proof that can be shared with charterers or insurers to defend against claims based on false data and safeguarding both revenue and reputation.
About the PntGuard partnership
PntGuard has been developed through a collaboration between cross-industry partners Tschudi Shipping Company, NAL Research Corporation and SGM Technology, combining expertise from resilient satellite services, maritime technology and vessel operations.
Tschudi Shipping Company is a fifth-generation, Norwegian family-owned shipping and logistics group with more than 100 years of history of owning and managing ships. Focusing on client value through tailored solutions, strong partnerships, digital innovation, Tschudi’s core values are commitment, respect, and proactivity.
NAL Research Corporation, based in Virginia, USA, is a leader in Assured Positioning, Navigation and Timing (APNT) technologies, providing secure, resilient communications and tracking solutions for defence, government and enterprise customers operating in GPS-denied environments.
SGM Technology, headquartered in Oslo, Norway, develops advanced satellite-based digital and compliance systems for the maritime and fisheries sectors, delivering innovative, field-proven solutions that enhance operational safety, transparency and efficiency at sea.
U.S. Department of Transportation (DOT) figures show incidences of GPS signal interference, such as jamming and spoofing, have increased significantly in both North America and much of Western Europe. Both commercial and military operations are affected, and ADS-B reports from Zurich University of Applied Sciences (ZHAW) cite up to 700 global GPS spoofing and jamming incidents taking place daily.
Events are particularly concentrated around war zones, with Lithuanian airspace alone recording more than 300 cases of GPS interference in March. The consequences have ranged from emergency diversions of civilian aircraft to, in at least one case, the downing of an aircraft. Other sectors reliant on precise timing and geolocation, such as communications and emergency services, also are being impacted.
Of course, it’s not just navigation; and a swath of industries rely on PNT signals. This includes secure and regulatory-compliant financial transactions, power grid synchronization, asset tracking, ensuring data integrity and coordinating workloads across global telecommunications and artificial intelligence (AI) servers.
How can PNT systems be made more resilient to this interference? What emerging technologies enable PNT systems to maintain operational capability in GPS/GNSS-denied, degraded or disrupted space operational environments (D3SOE)?
Interference Techniques
GPS interference comes in a wide variety of forms, and systems are susceptible because the signals from the satellites are faint by the time they reach the Earth.
Jamming is a brute force denial of service (DoS) attack, with a device transmitting a signal on the same L1 (1575 MHz), L2 (1227 MHz) or other relevant bands as the PNT satellites. Being nearer and stronger, these signals drown out the GPS information and prevent the ability to calculate a position, simply making GPS services unavailable.
Conversely, spoofing is a more sophisticated technique that mimics the structure of an authentic satellite signal but transmits falsified timing and positioning data. Similar to jamming, this relies on the spoofed signal being closer and more powerful than the legitimate PNT transmission and can either trick the navigation system into believing it is suddenly in a different position, or alter it slowly over time causing, for example, a ship or aircraft to deviate into an unsafe location.
These DoS and deception techniques are the major classes, but in addition to natural and accidental man-made sources, there also are multiple variations on spoofing techniques and methodologies:
Meaconing: Rebroadcasting of an authentic signal with a delay and shift in position to affect navigation systems.
Replay attacks: Like meaconing, but more targeted to financial transactions, fooling GPS-based time-stamping systems into accepting fraudulent transactions.
Data-level manipulation: Where false orbital data, clock corrections and GPS time is given in addition to the location data. These tend to be harder to detect and cause slow changes. They also can be applied to systems that rely on precise timing, such as financial networks and power grids.
PNT Resilience
PNT resilience standards are set out in the draft IEEE P1952 standard, which specifies technical requirements and expected behaviors for resilient PNT user equipment.
End users can test five behavior levels, which are defined within this standard to enable users to select a level that is appropriate based on their risk tolerance, budget and application criticality.
Photo: PNT Resilience Levels
Level 1 represents a basic ability to detect interference such as jamming, spoofing, or other disruptions, and alert users. Level 2 enables equipment to automatically recover to normal operation when the disruption is no longer present. In level 3, the equipment can maintain acceptable performance during the disruption. This capability is fortified in level 4 by leveraging multiple diverse sources or advanced mitigation techniques. Finally, level 5 enables the equipment to verify that the time or PNT information received is accurate.
Here in the U.S., the NIST 8323.1 Cybersecurity Framework for PNT also offers a comprehensive approach to assessing and mitigating PNT-specific cybersecurity risks. The DHS’ Resilient PNT Conformance Framework and CISA Federal PNT Services Acquisition Guidance are additionally important.
Countering Jamming
Traditional PNT systems are struggling to keep pace and meeting IEEE P1952 to tackle GPS interference requires a sophisticated, multi-source zero-trust architecture that never trusts, always verifies and authenticates, and goes beyond simple signal reception. For mission-critical systems, not only do threats need to be detected, but incoming data need to be validated and alternative sources for PNT incorporated, all within an intelligent sensor fusion system.
If we look first at the DoS jamming technique, here the issue is an inability to detect the medium-Earth orbit (MEO) GPS/GNSS signal in the presence of another more powerful signal.
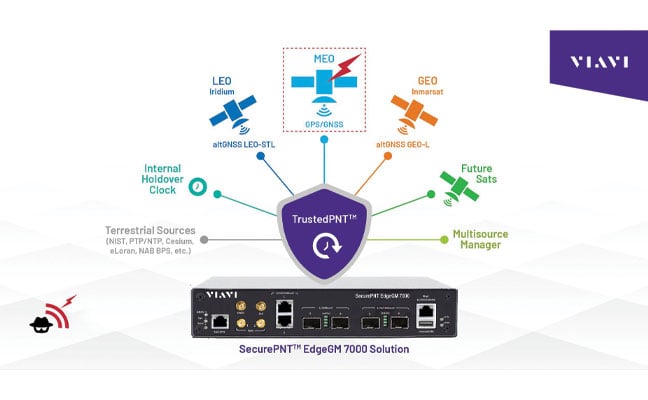
It is possible, however, to reinforce L-band communications from GPS satellites, and look to stronger signals, notably from low-Earth orbit (LEO) satellites. While these have less accuracy for timing (GPS/GNSS: <15 ns vs 80 ns for LEO), they are significantly stronger (the Iridium LEO STL signal is 1000x stronger than GNSS) and are more resistant to jamming.
Countering Spoofing
In spoofing, the use of encrypted signals is vital.
GPS signals are open, unencrypted and should not be trusted blindly, and the use of alternative cryptographically secured alternatives is essential to ensure the signal’s origin is legitimate. For example, this is implemented on both the Inmarsat GEO and Iridium LEO satellites used in VIAVI’s SecurePNT and SecureTime services.
Sensor fusion also should be implemented to combine PNT data with information coming from onboard sensors such as inertial measurement units (IMUs) to identify inconsistencies — not just sudden large jumps but continual slight deviations.
Beyond these, navigation message authentication can be implemented, using a public key to verify the satellite-broadcast signature and prove the location, clock corrections and status being transmitted. This is already implemented by Europe’s Galileo Open Service Navigation Message Authentication (OSNMA) and makes it very difficult to data-level spoof these satellites.
While using receiver autonomous integrity monitoring (RAIM) techniques, calculate position with redundant satellites, excluding one satellite each time to check for consistency of results. ARAIM (advanced RAIM) uses the same technique, but applies it to multiple constellations, for example, GPS and Galileo.
Signal liveliness/consistency checks can be particularly effective against meaconing and replay attacks. These techniques examine the Doppler shift of the signal, with satellites having predictable and specific profiles that will differ significantly when compared to a ground-transmitted signal, which will have a near-zero Doppler shift.
Operating Under D3SOE
The above is a summary of the types of techniques that underpin VIAVI’s SecurePNT and SecureTime services.
SecureTime eGNSS GEO uses an encrypted L-band signal, transmitted from Inmarsat’s GEO satellites to create an enhanced timing service with GNSS authentication and anti-spoofing capabilities and provides sub-5 ns timing accuracy when installed on SecurePNT products.
Conversely, the SecurePNT systems implement multi-source receivers for GNSS backup and multi-band GNSS with GEO-L for outdoor antennas. The PTP grandmaster uses the latest sub-microsecond accuracy PTP protocol and the traditional millisecond range accuracy Network Time Protocol (NTP) to be compatible with virtually all standard IT equipment — also implementing high-speed 25G PTP Ethernet for connection to high-performance AI data center and AI-RAN networks and financial exchanges without creating bottlenecks.
Terrestrial sources, such as a network PTP feed and an optional atomic caesium clock, also can be used for synchronization to increase resilience in the event of a prolonged GPS outage. Nino De Falcis is an experienced business development leader with a strong background in the Global PNT market. Currently serving as the senior director of Global PNT Business Development at VIAVI Solutions since January 2024, he focuses on accelerating global business development and identifying growth opportunities.
Trimble has launched its data collector portfolio. The suite includes the Trimble TSC710 data collector, the Trimble TSC510 controller and the Trimble T110 tablet, built for advanced functionality and integration across field operations.
When used with Trimble Connect, a common data environment and collaboration platform, or Trimble WorksManager civil site management cloud software, users can exchange data between the office and jobsite in near real-time to improve operations.
As the physical interface between Trimble hardware and software, the data collectors translate the physical world into an accurate digital representation and back. They enable connected workflows through Trimble Connect and Trimble WorksManager, giving users real-time access to a single source of truth for all project data. Combined with Trimble field software, users can unlock productivity and efficiency gains with quality control capabilities that help reduce project errors and downtime.
The devices are part of an integrated technology ecosystem of Trimble hardware and software, enabling a single source of truth for all project data. The approach enhances collaboration for professionals in surveying and mapping, construction, utilities, mining, oil and gas and public safety and forensics.
“Trimble is dedicated to pushing the boundaries of what’s possible in the field,” said Boris Skopljak, vice president of geospatial at Trimble. “This new data collector portfolio empowers our customers with the tools they need to be productive and stay connected in any environment.”
The portfolio includes:
Trimble TSC710 data collector — Ideal for working with large model data files on a construction site, the TSC710 features a 7-inch touchscreen, a full keyboard and a Qualcomm processor that is faster and uses less battery power than the TSC7. The TSC710 runs on a Google Mobile Services-certified Android 14 operating system. Built for maximizing productivity around connected workflows, the TSC710 is equipped with 5G WWAN support and all-day battery life. The TSC710 has a narrowed neck and is 150 grams lighter than its predecessor.
Trimble TSC510 controller — Engineered to boost field efficiency and optimize workflows, the TSC510 is a robust handheld device with an IP68 rating, compared with IP65 for the TSC5, that enables continuous operation with an all-day battery and a Qualcomm processor up to three times faster than the TSC5, with twice the memory and storage. The TSC510 features a 5-inch screen and runs Android 14. With updated WWAN and Bluetooth modules, teams stay connected for smooth data exchange and real-time project updates.
Trimble T110 tablet — The T110 maximizes field productivity with an Intel 14th-generation Core Ultra 7 processor, built to handle demanding projects and large datasets, including point clouds and imagery. Its rugged design ensures reliable performance in demanding environments. The T110 combines features of the Trimble T10x and Trimble T100 into a single field tablet, including a powerful processor, swappable batteries, 4G LTE WWAN and a Trimble Empower bay enabling communication with Trimble field devices.
Availability
The Trimble data collector portfolio is available now through Trimble’s global network of dealers.
Aero Drop Systems (ADS) has developed Pathfinder, a proprietary autonomous navigation framework designed to reduce dependence on GNSS-based positioning. Pathfinder is signal-resilient, capable of maintaining precision even in complete GNSS dead zones and unaffected by deceptive interference.
At the core of Pathfinder lies an array of sensors and advanced self-regulating logic driven by machine learning. Unlike traditional systems that treat GPS as a singular source of truth, Pathfinder fuses a constant stream of information from multiple internal and external domains and dynamically rebalances itself in real time as it evaluates, cross-verifies, and refines its positional understanding based on an algorithm that classifies the trustworthiness of each data stream.
The result is a self-correcting navigation intelligence that can anticipate changing conditions, isolate false data, and continue to perform when other systems cannot. This allows Pathfinder to sustain highly accurate navigation during satellite connection or radio frequency outages or when being targeted with jamming or spoofing.
Designed as a modular framework, Pathfinder can be integrated across a range of fully autonomous platforms operating on land, at sea, or in the air. Its flexible architecture makes it suitable for both commercial logistics and defense applications, where navigation integrity is critical to mission success.
Currently in the testing phase, Pathfinder is part of ADS’s broader initiative to develop resilient, autonomous logistics technologies capable of performing in contested and complex environments. ADS has confirmed that Pathfinder will serve as the core navigation technology for the platform Aerocrate. Aerocrate is a disposable, autonomous aerial delivery system that enables precise, reliable resupply without requiring recovery operations, staging areas, or active communication with the platform.
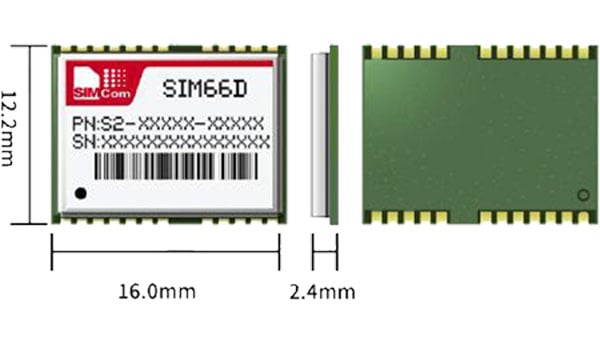
Swift Navigation and SimCom are partnering to deliver centimeter-level GNSS accuracy to high-volume robotics applications worldwide. The collaboration integrates Swift’s Skylark precise positioning service with SIMCom’s high-performance SIM66MD and SIM66D GNSS modules.
This combination allows manufacturers and developers using these modules to activate centimeter-accurate satellite positioning, dramatically improving the performance, safety and reliability of robotic lawnmowers, delivery robots, agricultural vehicles, and other autonomous systems. SIMCom’s GNSS modules have compact designs, low power consumption, and wide array of interfaces, making them suitable for seamless integration into diverse IoT and autonomous devices.
Swift’s Skylark Nx RTK, the highest precision variant of Skylark, leverages a proprietary atmospheric model to deliver continuous 1-2 cm accuracy across vast geographic areas, including all of Western Europe. The carrier-grade network eliminates the need for developers to manage base stations or switch between multiple correction providers, simplifying deployment of high-precision outdoor robots at scale.
Key benefits for autonomous navigation:
Autonomous Operation. Centimeter-level accuracy is essential for robots to execute complex tasks, such as following precise mowing patterns, planting seeds with exact spacing, or navigating narrow construction sites.
Safety and Geofencing. Precise localization enables reliable enforcement of virtual boundaries (geofencing), preventing robots from entering restricted zones or colliding with obstacles, which is critical for safety in public or shared spaces.
Improved Efficiency. Reliable 1-2 cm precision reduces path errors, minimizes overlap in coverage (e.g., in farming or lawn care), and ensures the robot consistently reaches its exact target destination, maximizing battery life and operational uptime.
Customers purchasing SIMCom’s SIM66MD and SIM66D modules now receive a six-month free trial of Skylark Nx RTK.