At sunrise on Oct. 1, 2024, SL-15 launched into a perfectly clear blue sky over the desert from Spaceport America, in Las Cruces, New Mexico. The flight — conducted by UP Aerospace with support from NASA’s Flight Opportunities program — carried aloft the payloads and hopes of researchers from three countries — Italy, Germany and the United States — and ten organizations.
Spaceport America, the first commercial spaceport in the world, is an FAA-licensed launch complex. Situated on 18,000 acres adjacent to the U.S. Army White Sands Missile Range in southern New Mexico, it has a rocket-friendly environment of 6,000 square miles of restricted airspace, low population density, a 12,000 ft by 200 ft runway, vertical launch complexes and about 340 days of sunshine and low humidity.
UP Aerospace, a Denver-based company created in 1998, conducted its first suborbital flight from Spaceport America in 2006, which was also the inaugural flight from the spaceport. UP Aerospace maintains a launch complex, a payload processing center and a space propulsion center at the spaceport. Its launch operations and SpaceLoft suborbital launch vehicle were designed and built as a reliable, low-cost Reusable Launch Vehicle (RLV) system.
NASA’s Flight Opportunities program rapidly demonstrates technologies developed by industry, academia, as well as NASA and other government scientists through testing with various commercial flight providers. The program matures capabilities needed for NASA missions and commercial applications while strategically investing in the growth of the U.S. commercial space industry. Available flight platforms include suborbital rockets, rocket-powered landers, aircraft flying parabolic profiles to achieve reduced gravity, high-altitude balloons, and hosted orbital vehicles.
Interoperability test
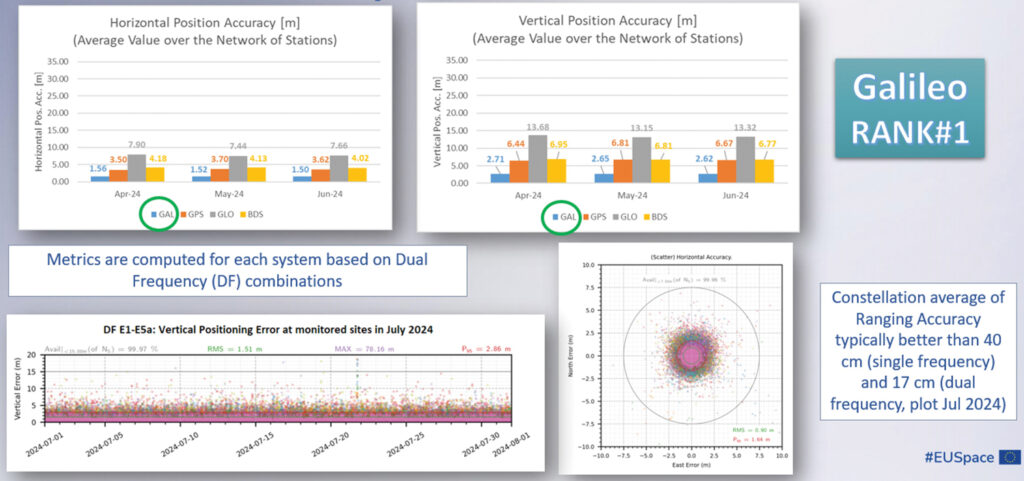
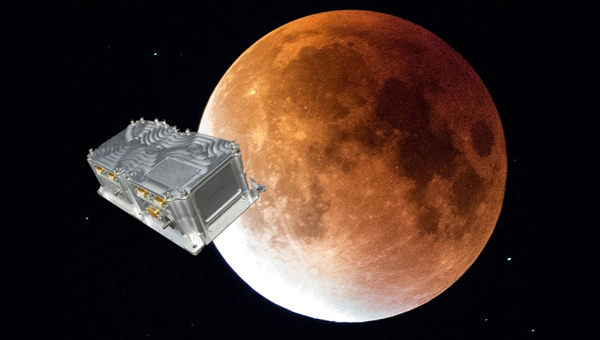
One of the payloads carried to suborbital heights by the SL-15 rocket was a suite of multi-GNSS receivers from NASA’s Space Communications and Navigation (SCaN) program, the European Space Agency (ESA) / European Space Operations Centre (ESOC), the Italian Space Agency (Agenzia Spaziale Italiana or ASI), and their contractors Fraunhofer (a German, publicly owned research and development organization) and Qascom (a private Italian engineering company offering security solutions in satellite navigation and space cybersecurity). A key goal of the flight test was to determine the scope of the interoperability of these receivers. The full results of the test will be presented at the intercessional meeting of the International Committee on GNSS (ICG), a part of the United Nations Committee for the Peaceful Uses of Outer Space (COPUOS) in Vienna in June 2025.
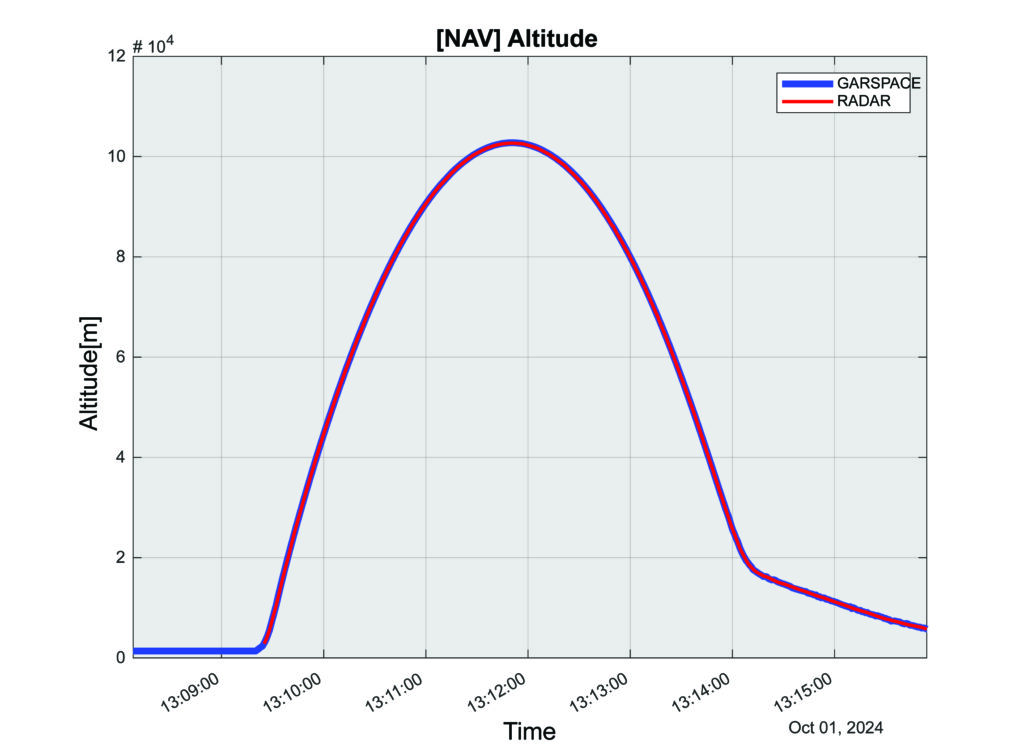
QN400-SPACE (GARHEO) SL-15 altitude profile. (Photo: ASI/Qascom)
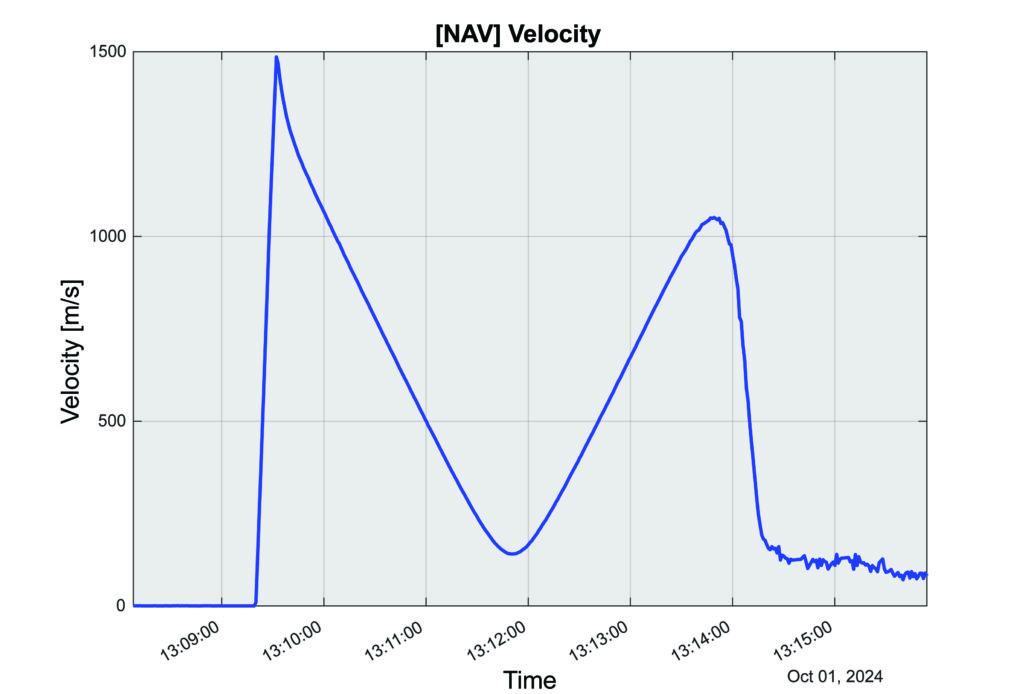
QN400-SPACE (GARHEO) SL-15 velocity profile. (Photo: ASI/Qascom)
One of the other payloads on the flight was an experiment by the New Mexico Institute of Mining and Technology — aka New Mexico Tech — on spacecraft health monitoring and real-time systems built by the company Immortal Data, which also tested out and collected environmental data on some of its own equipment as it relates to product development. Another payload was an advanced prototype Automatic Dependent Surveillance-Broadcast (ADS-B) transmitter that could potentially be used for independent, low-cost tracking of space launch vehicles.
Lisa Valencia, an electrical engineer for Overlook Systems Technologies, Inc. and NASA’s SCaN Program at NASA Headquarters, was the program manager for the SCaN payload mission. In November 2019, SL-14 tested NASA’s Autonomous Flight Termination Unit as well as Qascom’s GNSS signal recorder. Oscar Pozzobon, co-founder, president, and CEO of Qascom, was able to post-process the data collected by the recorder. SL-15 was originally planned to launch in November 2022; however, it was scrubbed due to interference between the launch vehicle’s S-band transmitter and the L-band GNSS receiver on board. In May 2023, the original SL-15 booster was used for SL-17, a mission carrying student payloads, which experienced an anomaly, ending the flight test three seconds after launch. Therefore, Valencia, her team, and the other teams involved were elated when the October 2024 launch was successful.
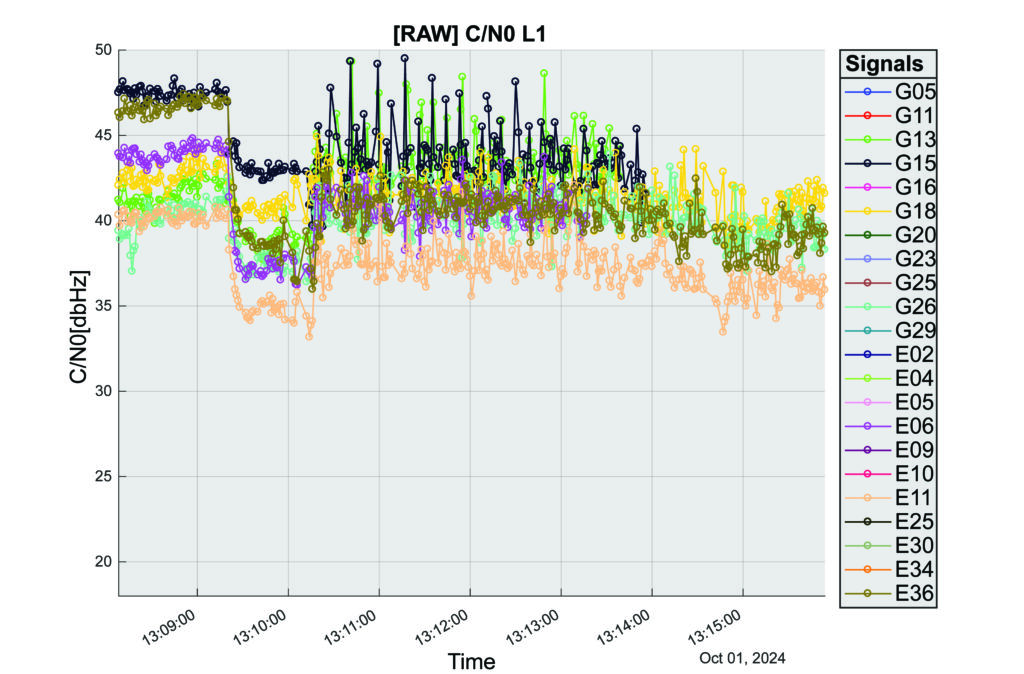
QN400-SPACE (GARHEO) SL-15 C/N0 profile. (Photo: ASI/Qascom)
The objective and the teams
Building on the success of the previous SL-14 launch, the SL-15 mission to fly two GPS-Galileo receivers on a sounding rocket is the result of an agreement between NASA, ASI and ESA. The primary objective was to assess GPS-Galileo performance in a highly dynamic environment. The secondary objective was to have the GNSS receivers integrated with the avionics on board the vehicle, with the aim to test the real time use of PVT available during the flight, in contrast to post processing on SL-14. This allowed the evaluation for operational use of multi-constellation / multi-frequencies GNSS for Autonomous Flight Termination Systems (AFTS). AFTS is an independent launch vehicle subsystem designed for range safety operations. From 2014 to 2019, Valencia was the project manager for AFTS in the Engineering Directorate at NASA’s Kennedy Space Center.
The interoperability experiment on the SL-15 mission included two Autonomous Flight Termination Units (AFTU) and two GPS-Galileo receivers utilizing the L1/E1/L5/E5a signals: a GNSS Dual Frequency / Dual Constellation QN400-SPACE receiver for GPS-GALILEO Receiver for Human Exploration & Operations (GARHEO) program of ASI and Qascom, and a GNSS Receiver with Open Software Interface (GOOSE) receiver from ESA/ESOC and Fraunhofer; as well as a JAVAD GPS L1 receiver. During the flight, a 12-second launch and boost phase was followed by ascent coasting until the rocket reached apogee at an altitude of 115 km, followed by descent, re-entry, and landing, for a total flight duration of 13 minutes. The rocket reached a maximum speed of 1400 m/s, a maximum acceleration of 13.5 G, and a maximum spin rate of 7 Hz.
The NASA sponsor for the GNSS Payload mission is James J. Miller, Executive Director of the National Space-based Positioning, Navigation, and Timing (PNT) Advisory Board with the SCaN Program. The team members are:
- NASA: James J. Miller, Lisa Valencia, Hubert Chang, Paul De León, Anh N. Nguyen
- ASI: Giancarlo Varacalli, Claudia Facchinetti, Mario Musmeci
- Qascom:Oscar Pozzobon, Riccardo Longo, Salvatore Guzzi, Samuele Fantinato
- ESA:Werner Enderle, Mark Van Kints, Erik Schoenemann, Volker Mayer
- Fraunhofer:Matthias Overbeck, Santiago Urquijo, Inigo Cortes, Fabio Garzia
- UP Aerospace: Jerry Larson, Trevor Morgan, Eric Larson, Craig McEwen, and Jay Holcombe
Results and next steps
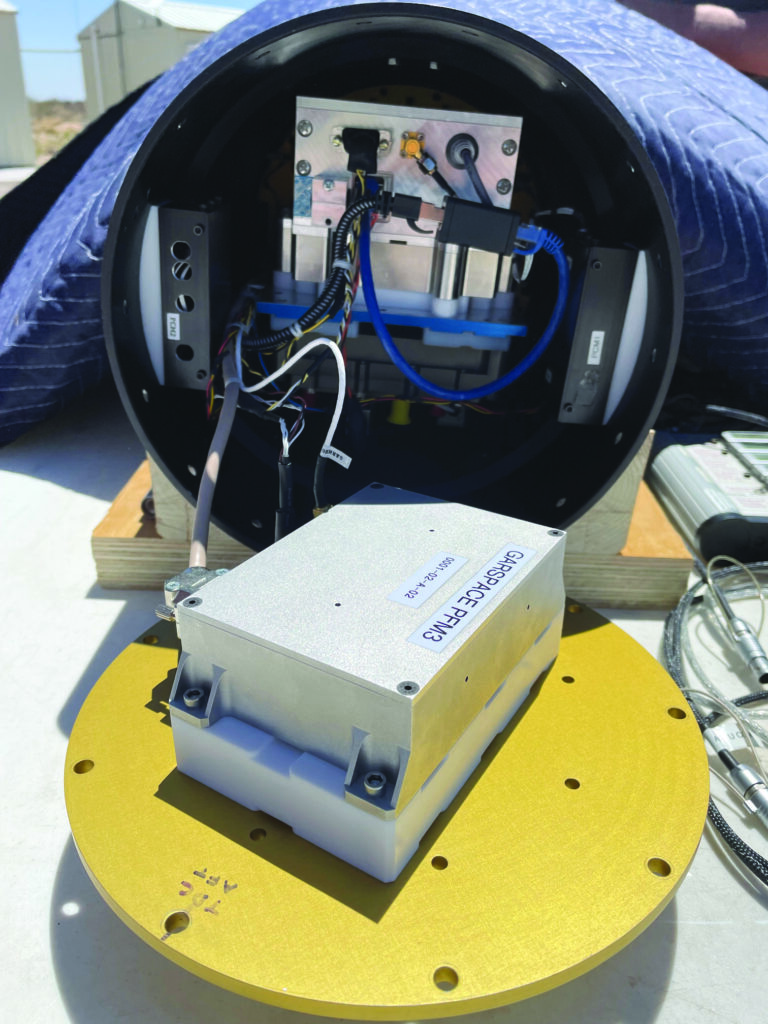
Integrated QN400-SPACE (GARHEO) GNSS receiver. (Photo: ASI/Qascom)
During this highly dynamic flight, all GNSS receivers successfully tracked, with high accuracy, based on position, velocity and time (PVT) solutions, meeting the interoperability payload objectives of dual constellation (GPS and Galileo) and dual frequency (L1/E1 and L5/E5a) compatibility.
One plot of the rocket’s altitude changes over time produced from the data collected is striking: a blue line representing the data from the GARHEO and a red one representing data from a monitoring radar on the ground overlap perfectly, resulting in a single purple line on the graph.
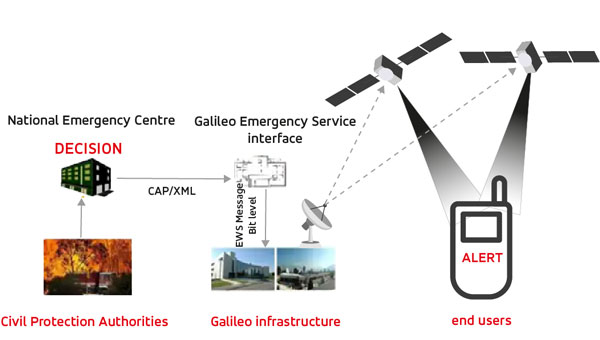
During a launch, space vehicles rely on GNSS signals for tracking, monitoring, and safety. Their ability to receive signals from multiple GNSS constellations would offer launch vehicles more precise and reliable real-time PVT information. The SL-15 GNSS experiment demonstrated the benefits of interoperability between Galileo and GPS in highly dynamic environments.
The next step will be a detailed analysis of the data collected during the flight. ESA/ESOC’s next steps will be to process the data from the GOOSE receiver taken on-board and to apply different concepts and algorithms in order to achieve the highest possible accuracy for the SL-15 flight trajectory. Among them will also be a Precise Point Positioning (PPP) GNSS technique that utilizes the GOOSE receiver data in combination with precise orbits and clocks for Galileo and GPS, which will be calculated by ESOC’s Precise Navigation System (EPNS) software. Results are expected in early 2025. ASI/Qascom’s next steps include utilizing the data collected by the SL15 experiment to support the development and validation of the new generation of high dynamics GNSS receivers providing enhanced robustness against GNSS threats. This is the main objective of Qascom’s receiver. At least one launch vehicle is planning to incorporate a multi-GNSS (GPS + Galileo) receiver into their AFTS.
Quotes
“The success of SL-15 is the result of a multi-year collaborative effort with the Italian Space Agency (ASI) and the European Space Agency (ESA) to develop multi-GNSS capabilities to improve resilience for space users. The multi-national SL-15 team worked extremely well together to overcome many challenges, leading to a successful mission. The successful launch of SL-15 was particularly rewarding to our international team in light of the numerous delays we had due to export control restrictions, high winds at the launch site, and key personnel catching COVID-19 during pre-launch checkout. These delays, however, gave us time to resolve payload interference issues identified during one of the launch preparations as well as have our payload reassigned from a rocket with a faulty engine that ended up failing on another mission (SL-17).”
— Lisa Valencia
“The key benefit of this mission was validating our ability to track both GPS & Galileo signals under the highly dynamic conditions of a sounding rocket launch. These included an initial acceleration to 14G (or 14 times the gravitational acceleration on Earth’s surface), a 7 Hz spin rate (seven spins every second), and a maximum speed more than 1400 m/s (3,132 mph).”
— A.J. Ora, Ph.D.
“The integration of GPS+Galileo for high-dynamic space applications will most certainly continue opening up more operational scenarios as GNSS signals become more available and resilient in the sparse and challenging space domain. The use of additional GNSS signals to augment GPS is developing rapidly and is a cornerstone of strengthening international collaboration as called for in Space Policy Directive-7 (SPD-7). NASA is therefore a proud contributor in helping to develop navigation tools that will benefit all space sector users as more knowledge is gained and adopted.”
— James Miller
“UP Aerospace appreciates the opportunity to work with NASA and the vast array of customers they serve. We have partnered in many successful launch campaigns. It can be challenging to integrate so many different payloads into one vehicle, but we are excited at the success of SL-15. Launching rockets is a risky business and sometimes anomalies can occur. The key is to learn from each launch and incorporate the lessons-learned into subsequent flights, ensuring their success.”
— Trevor Morgan, President/CEO of UP Aerospace