SBG Systems has upgraded its inertial navigation systems — Ekinox, Apogee and Navsight— with new GNSS receiver options designed to offer greater flexibility while maintaining high precision and reliability.
Previously, SBG Systems integrated a triple-band GNSS receiver with RTK and Fugro Marinestar capabilities into its navigation solutions. The latest update introduces three additional GNSS receiver variants, each tailored to specific regional and application needs. These include:
Marinestar: This variant supports Fugro Marinestar, delivering precise point positioning (PPP) with centimeter-level accuracy via L-band corrections without requiring a base station. It is optimized for marine applications such as hydrographic surveys and dredging.
HAS Ready / NavIC: Designed for future compatibility, this variant includes Galileo E6 support for the upcoming Galileo High Accuracy Service (HAS), offering free decimeter-level PPP corrections globally. Additionally, it supports the Indian NavIC system, making it suitable for applications in urban environments, aviation and operations in India.
Centimeter-Level Augmentation Service(CLAS): Tailored for users in Japan, this variant utilizes QZSS L6 signals to provide free PPP corrections without external services. It is ideal for land and marine navigation in Japan.
All GNSS variants integrate seamlessly with SBG Systems’ antenna portfolio and Qinertia post-processing software. Users select the appropriate GNSS variant at purchase to match their operational requirements. These enhancements aim to provide versatile solutions across diverse industries while ensuring reliable performance.
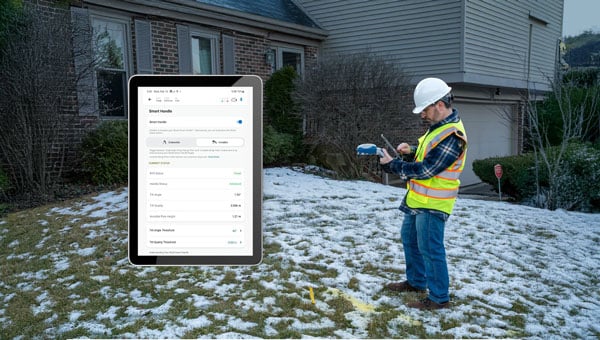
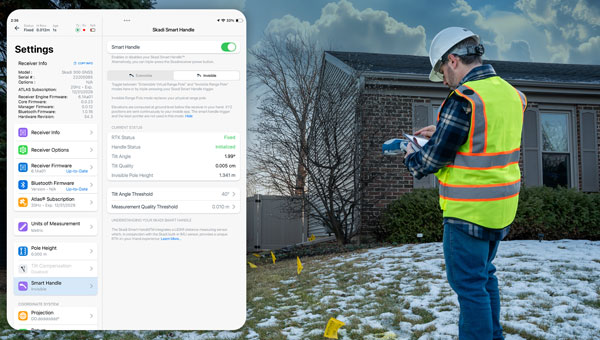
The Android version of the Eos Tools Pro app by Eos Positioning Systems (Eos) now fully supports the new Skadi Series GNSS receivers. This update introduces advanced features of the Skadi Series, such as Skadi Tilt Compensation and the Skadi Smart Handle, to Android users.
Key features of the update include:
Flexibility across receiver models: Android users can now use Eos Tools Pro with Skadi Series receivers, as well as Arrow Series GNSS receivers, while maintaining a user-friendly design.
Tilt compensation for streamlined workflows: The app processes tilt-compensated GNSS positions provided by Skadi Tilt Compensation, allowing for accurate positional data even when survey poles are tilted. These values can be streamed directly to third-party apps without additional steps.
Enhanced accuracy with Skadi Smart Handle: The Skadi Smart Handle allows users to achieve RTK-level accuracy during GNSS positioning without a physical range pole, making it ideal for handheld setups.
Integration with third-party applications: All GNSS data, including tilt-compensated and Smart Handle-processed values, can be seamlessly transmitted to third-party mobile apps, simplifying workflows.
The updated Eos Tools Pro app is available for download on the Google Play Store.
Quectel Wireless Solutions has introduced the LG680P, a multi-constellation, quad-band GNSS module designed to provide high-precision positioning for applications such as precision agriculture, intelligent robotics and surveying. It has a multi-constellation capability for accurate and reliable positioning.
The LG680P supports concurrent reception of L1, L2 and L5 frequency bands, which seeks to improve signal quality and precision. Additionally, it is equipped to support advanced signals such as Galileo E6, QZSS L6 and BDS B2b for Precise Point Positioning (PPP) technology. This feature enables high-precision accuracy without requiring local or broadband connectivity. The module’s ability to integrate these technologies makes it suitable for demanding environments where reliable positioning is critical.
The module achieves horizontal accuracy of up to 0.8 cm + 1 ppm, even in challenging urban environments. It has been tested with dual-band corrections to ensure backward compatibility with existing systems while supporting quad-band corrections for optimal performance. This backward compatibility allows the LG680P to replace older dual-band systems seamlessly, offering enhanced precision and futureproofing without requiring immediate infrastructure upgrades.
Features and Applications
To maintain signal integrity in complex electromagnetic environments, the LG680P incorporates professional-grade anti-jamming and interference detection algorithms. It’s built-in NIC anti-jamming technology suppresses multiple narrow-band interferences, improving signal reception and stability. These features make the module highly robust in environments with significant electromagnetic interference.
The LG680P is compact, with a 22 mm by 17 mm footprint that adheres to a widely used industry form factor. It supports multiple interfaces such as UART, SPI, I2C, and CAN, ensuring seamless integration into diverse platforms. The module also supports external active antennas to optimize signal reception and enhance positioning accuracy.
The LG680P is suited for various applications, including autonomous lawnmowers, delivery robots, surveying equipment, and precision agriculture tools. Quectel also offers two external full-band GNSS antennas compatible with the module: the YEGR001W8AH geodetic GNSS antenna with versatile mounting options and the YEGD006U1A compact patch antenna designed for high-precision positioning.
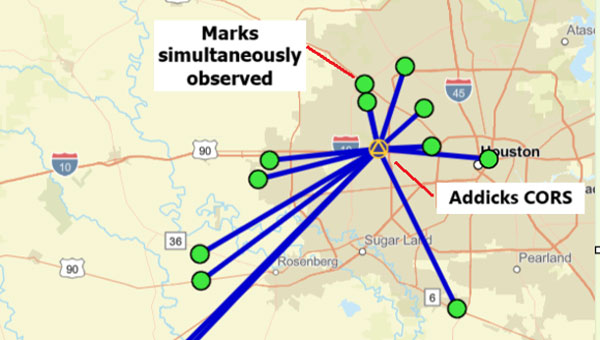
A “GNSS radial survey” is a surveying technique where a central control mark is established within an area, and vectors are measured from the central control mark to various other marks of interest surrounding the central control mark, essentially creating a “spoke-like” network design.
Plot of OPUS Projects network diagram. Hub is Addicks CORS, all marks are simultaneously observed during the session. (Photo: Dave Zilkoski)
Why not use a GNSS radial survey when establishing geodetic control networks?
Basically, you cannot directly calculate a “relative accuracy” between two marks if no observations are taken between them. That said, a direct measurement such as a GNSS vector allows error propagation between two marks. Therefore, using the “spoke-like” concept, you know the relative accuracy between the central control mark and a single mark at the end of a single spoke. Still, you don’t know the relative accuracy between marks on the different spokes.
Anyone who has used OPUS Projects or seen presentations on OPUS would think, based on the OPUS Project’s HUB processing strategy, that OPUS Projects was performing a radial survey.
When using OPUS Projects, NGS recommends that users select one CORS as a HUB while processing GNSS session data. In the example here, the Addicks CORS (ADKS) was used as the HUB in data processing. So, why is this not considered a radial survey? It may look like a GNSS radial survey but there’s a lot that goes on behind the scenes.
The bottom line is that OPUS Projects is denoted as a simultaneous (session) processor. This means the vector solution is computed from simultaneous processing of all independent vectors with mathematical correlations between all simultaneously observed vectors. OPUS Projects processing includes all independent vectors along with mathematical correlations to provide the relative connection to marks that are simultaneously observed. In the example above, when processed by OPUS Projects, all the marks occupied (indicated by the lines connecting to the Addicks CORS HUB) will have correlations computed between each other. These correlations are included in the data that is used in the least squares adjustments that are performed during the OPUS Projects workflow (NGS uses a file denoted as the gfile to document the correlations.)
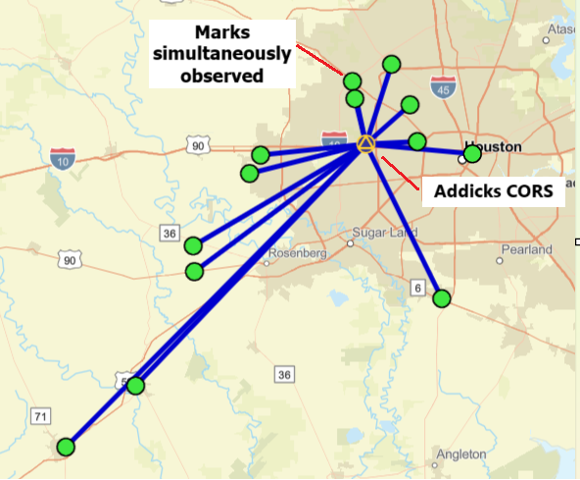
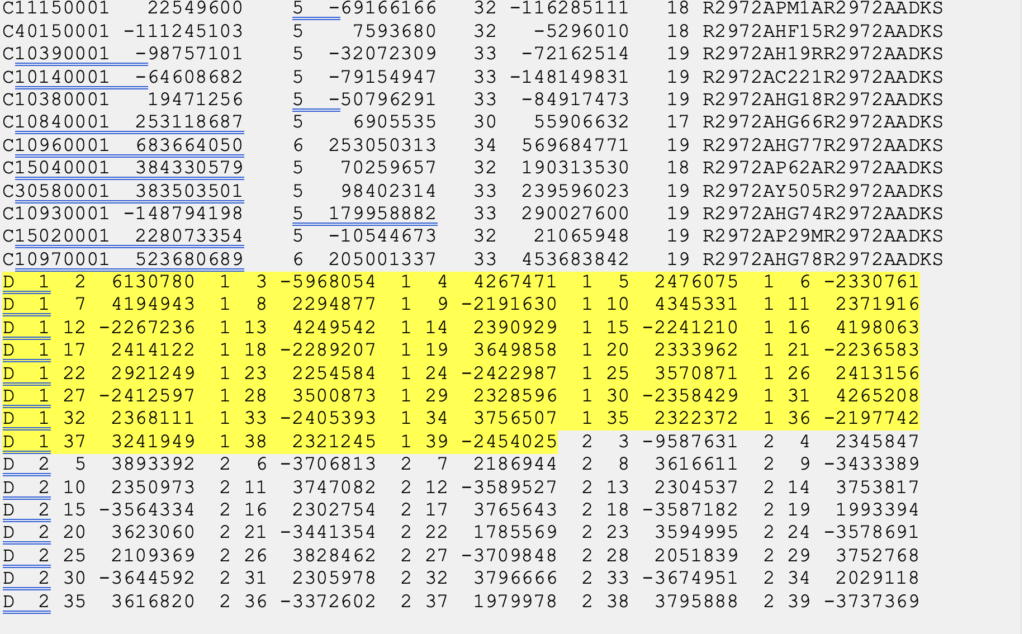
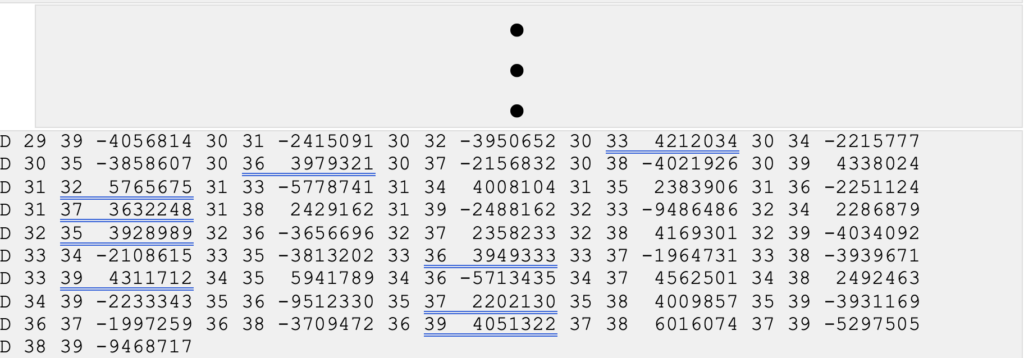
The image below provides a sample of mathematical correlations between marks simultaneously observed during the session. The gfile can be a large file when the survey includes a lot of simultaneously observed marks because there will be correlations between all marks. There were 13 marks simultaneously observed during the sample session, so the “spoke-like” diagram includes imaginary lines between every mark because of the mathematical correlations between these marks.
Excerpt from an output from simultaneous (session) processing. (Gfile contains baseline information with mathematical correlations.)
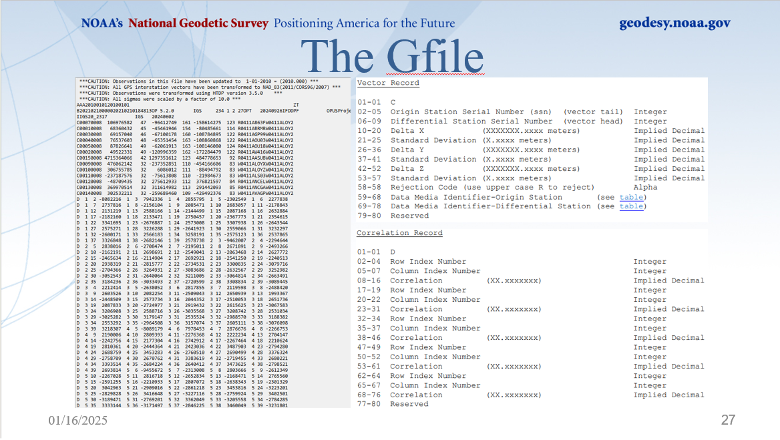
Dan’s presentation included a slide that described the file’s format. The file provides information on the vectors (delta X, delta Y, delta Z and their standard deviations) between the HUB and the individual marks, plus the mathematical correlations between all marks simultaneously observed during the session. I have highlighted a vector’s components and standard deviations and a set of mathematical correlations.
The image below, from Dan’s presentations, describes the format of NGS’s gfile.
Photo: NGS
Some software programs perform what is called sequential (baseline) processing, which involves processing one vector at a time and ignoring the mathematical correlation between baselines observed in the same session. So, what does this mean, and why is it important?
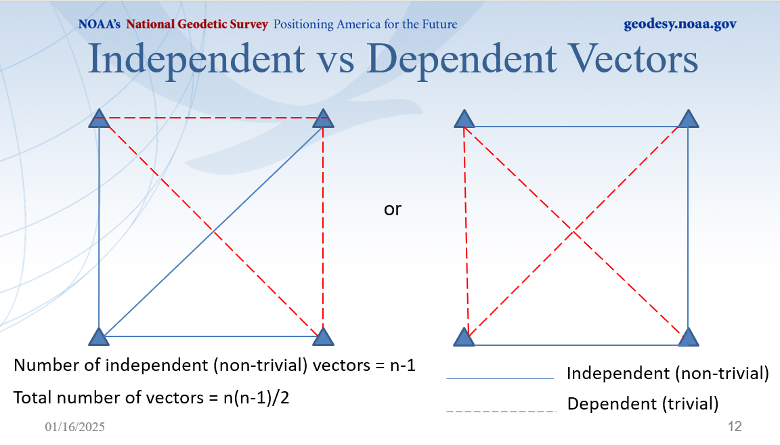
A couple of definitions are necessary to understand the concept. Independent baselines are baselines where no other baseline is a linear combination of another baseline. Linearly dependent (trivial) baselines are baselines that are linear combinations of another baseline. Basically, once you have used a particular set of data to compute a vector, you can’t use the same data to compute a different vector.
Dan did a nice job during his webinar explaining what baselines are considered trivial and what baselines are non-trivial. This is very important because if your software is a sequential (baseline) processor, you must ensure that trivial vectors are not included with the non-trivial vectors. As Dan highlights in his webinar, dependent vectors are not additional observations. But they do offer useful information if treated properly.
Photo: NGS
There was a 1992 study performed by Michael Craymer and Norm Beck, “Session Versus Baseline GPS Processing,” that explained the differences between sequential baseline processing and simultaneous (session) processing, and what the user needed to do to use sequential baseline processing. Basically, when all the trivial vectors are added to the adjustment, they are treated like additional independent observations, resulting in an inflating degree of freedom and overly optimistic error estimates. If all possible vectors are processed, then resulting coordinates may essentially be the same as in simultaneous (session) processing, but statistics will be overly optimistic and misleading. The 1992 paper does state that the two different processing techniques can produce the same results.
“It is shown that using all possible baseline solutions (with the covariance matrix scaled by n/2, where n is the number of simultaneously observing receivers) is mathematically equivalent to session processing with all correlations only under certain conditions. This equivalence is verified empirically using simulated and real data. However, the conditions under which this equivalence holds are difficult to achieve in practice.”
Users who process data using a sequential processor should read the 1992 study by Craymer and Beck to understand the conditions under which the two processes generate the same results.
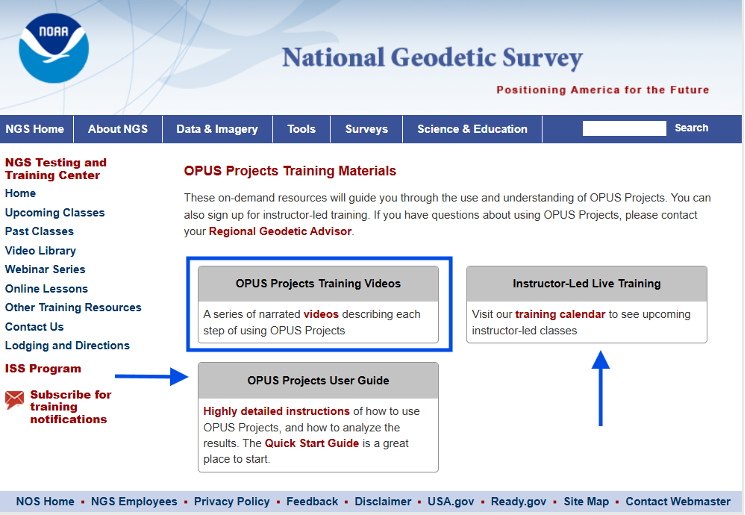
I would encourage all individuals that process GNSS data, regardless of which software you use, to download the NGS OPUS User Forum webinar. NGS also has a website that provides training material on the use of OPUS Projects. The more you know about the software you use, the better you will be prepared to address issues associated with your survey results.
Topcon Corporation and FARO Technologies have entered a strategic partnership to develop and distribute laser-scanning technology solutions. The collaboration aims to expand access to advanced digital reality tools and result in complementary product developments, such as integrating Topcon and Sokkia systems with FARO products.
The initiative focuses on advancing laser-scanning technologies across key sectors, including construction, surveying, mapping, architecture, forensics, building information modeling and industrial plant and process applications. By combining their expertise, the companies plan to enhance software integration and develop joint product solutions to address user needs more effectively.
Eos Positioning Systems has launched a redesigned Eos Tools Pro app on iOS. The updated app features a modern user interface and user experience to enhance usability, functionality and efficiency for professionals using Eos GNSS technology.
The redesigned app includes a reorganized settings menu to improve the organization of all configuration options, offering a centralized space for users to manage their GNSS preferences and optimize workflows. The new interface has been revamped to take advantage of Split View mode on iPadOS to view all pertinent information when using Eos Tools Pro in conjunction with a data-collection app. This is particullarly useful for Skadi Tilt Compensation and Skadi Smart Handle users.
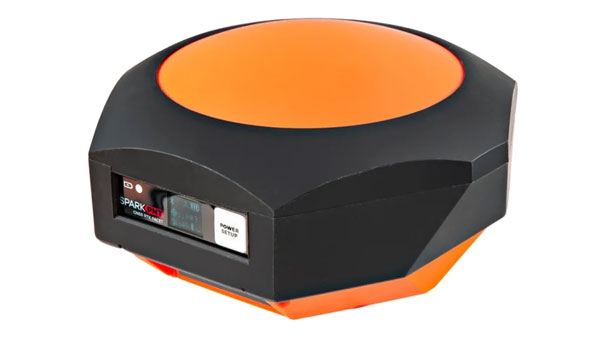
SparkFun Electronics has released the SparkPNT RTK Facet mosaic L-Band, a high-precision geolocation and surveying receiver. It features Septentrio’s multi-band mosaic-X5 and offers centimeter-grade measurements with 6 mm RTK fixes available in less than one minute, according to Sparkfun.
The receiver can connect to phones or tablets via Bluetooth, allowing NMEA output compatibility with most geographic information system software. It uses u-blox’s PointPerfect service for corrections, broadcast from a geosynchronous Inmarsat satellite.
The RTK Facet mosaic L-Band features an ESP32 WROOM connected to a mosaic-X5 GNSS multi-band receiver, along with peripheral hardware. It includes a surveyor-grade L1/L2/L5-Band antenna designed to receive GNSS signals and PointPerfect correction.
The device operates in various modes, including GNSS positioning, GNSS positioning with RTK L-Band, GNSS positioning with RTK, GNSS base station and GNSS base station NTRIP server. In rover mode, it can achieve 6 mm to 60 mm horizontal positional accuracy.
As an open-source hardware product, users can access and modify the electrical and mechanical design files. The kit includes the enclosed device, thread adapter, charger, data cables and carrying case.
Topcon Positioning Systems has become an authorized distributor of Pix4D’s photogrammetry software portfolio, expanding access to high-precision positioning and 3D mapping technologies.
The partnership aims to enhance reality capture solutions across various industries, including surveying, mapping, architecture engineering and construction, energy, utilities infrastructure, public safety, and forensics.
The agreement streamlines the procurement process for end-users by allowing them to access Pix4D‘s advanced photogrammetry software solutions through Topcon’s established global distribution network and ensures comprehensive technical support for users.
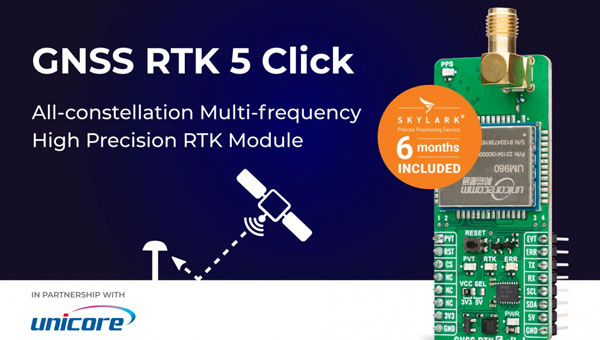
MIKROE has unveiled the GNSS RTK 5 Click, a compact add-on board for high-precision positioning and navigation demands. It features the UM980, an all-constellation multifrequency RTK positioning module from Unicore, with the advanced NebulasIV SoC for enhanced performance.
It supports Swift Navigation’s Skylark precise positioning service, multiple GNSS constellations, and RTK positioning for centimeter-level accuracy. The board also features JamShield technology for robust performance in challenging environments, USB connectivity for easy configuration and visual status indicators for module status and GNSS signal reception.
It can be used for a variety of applications, including surveying and mapping, precision agriculture, UAVs, autonomous robots and autonomous driving.
Eos Positioning Systems has introduced a new environmentally conscious initiative for its Skadi Gold, Skadi 300 and Skadi 200 GNSS receivers. These devices will now be shipped in a field-rugged carrying case made entirely from recycled materials.
The case is designed to meet the demands of professionals who utilize GNSS technology in challenging environments. Its construction incorporates durable, eco-friendly materials that can withstand various field conditions, from remote wilderness areas to urban construction sites.
A key feature is its composition of 100% post-consumer recycled resin, which significantly reduces waste and promotes environmental sustainability, according to the company. It is specifically engineered to be shock-resistant and weatherproof, providing comprehensive protection for the enclosed GNSS receivers.
The case is provided as a standard inclusion with every purchase of the Skadi Gold, Skadi 300 or Skadi 200 GNSS receivers at no additional cost.
Topcon Positioning Systems has introduced the HiPer XRa GNSS receiver for surveying, mapping and construction applications. The new receiver is designed to benefit a wide variety of users, including construction professionals, surveyors, GIS professionals, archeologists, engineering firms and others who rely on quality, precision measurements. The HiPer XR supports GPS, GLONASS, Galileo, BeiDou, IRNSS, QZSS and SBAS.
The new receiver has advanced Topcon Integrated Leveling Technology (TILT) compensation, featuring a calibration-free and magnetic interference-immune integrated IMU that provides up to 60° of tilt for precision measurements in challenging positions. It has signal integrity protection, anti-jamming and anti-spoofing capabilities designed to keep data reliable, even in areas with interference or degraded signals.
Through the myTopcon NOW! Website users can access online training materials, firmware updates, and additional software resources.
Leica Geosystems, part of Hexagon, has introduced the Leica CoastalMapper, an airborne bathymetric lidar system designed for coastline and river surveying. The system offers a wider field of view and the ability to operate at higher altitudes. As a result, the CoastalMapper can survey coastlines and rivers 250% faster than previous sensor models.
The CoastalMapper is suitable for a wide range of mapping applications, from assessing infrastructure resilience to monitoring river floods and conducting environmental investigations in both shallow and deep waters.
It features a combination of a high-performance bathymetric lidar module, a Leica TerrainMapper-3 topographic lidar and an imaging sensor, all integrated into a compact and lightweight sensor head. This allows the CoastalMapper to capture up to 1 million bathymetric data points and 2 million topographic data points per second while providing high-resolution imagery with a 5 cm ground sampling distance at typical flying heights.
One of the key advantages of the CoastalMapper is its ability to collect bathymetric and topographic lidar data and imagery in a single flight. This simultaneous multi-data capture seeks to significantly reduce survey time, operational costs and the environmental impact of each mission. Additionally, it can be mounted on helicopters, allowing for surveys in challenging environments such as rivers in steep mountainous terrain.
The CoastalMapper seamlessly integrates with Leica Geosystems’ airborne mapping workflows. It also offers cluster processing capabilities, allowing users to analyze large datasets and reduce the time from data collection to final deliverables. These outputs can include classified point clouds, digital terrain and surface models, and various imaging products, making the CoastalMapper a comprehensive solution for a wide range of mapping needs.