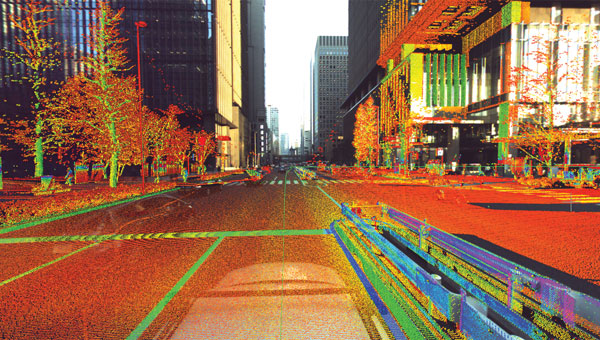
Point cloud and 360-degree image collected with the Leica Pegasus: Two Ultimate. (Photo: Leica Geosystems )
The latest mobile mapping innovations are transforming how we manage, design and monitor our critical infrastructure — in particular, reshaping road maintenance. Through the advance of mobile mapping and reality capture imagery, our ability to map, proactively survey and even design roads, from simulating the vibration of a vehicle on a road to mapping out city routes, is drastically improving through the symbiosis of the digital and physical worlds.
Leveraging data: Traditional vs autonomous mapping
Traditional methods for assessing damage to road surfaces are highly manual, field-based, labor-intensive and time-consuming. Visual inspection, for example, comes with resourcing challenges, data exhaustivity and inaccurate assessments, making quality assessment and control a challenge. There is limited accurate analysis of how the road changes over time, and the work involves significant safety issues, with surveyors required to work in the field near live traffic and often requiring the traffic to be interrupted to allow measurements to be taken.
By contrast, automated laser scanning solutions provide spatial geometry for precise measurements that imagery-only methods cannot capture when assessing damage to road surfaces. They overcome any inaccuracies or lack of detail regarding location and circumstances. This technology also allows professionals to study the surrounding context of the road and measure the depth of a hole or the size of a crack with spatial data, which visual methods cannot capture. Hexagon’s mobile mapping systems, used for virtual road management and maintenance, enable access to a completely virtual environment to unlock the insights this data provides, transforming how we manage our infrastructures. With spatial data collected over time, asset degradation and other factors foundational to maintaining road infrastructure can be predicted by the more effective leveraging of data.
With geospatial data allowing the accurate mapping of potholes, rutting and depressions alongside accurate location mapping using GIS, asset managers can map the data onto real-world imagery to create an interactive, 3D model integrating the physical world and geospatial data. Combined, this unlocks insights and overhauls efficiency for asset managers performing road maintenance, allowing them to prioritize and make decisions based on data live in the field.
Veris deploys Hexagon’s solutions for road mapping
Recently, Hexagon’s technology was used by Veris, a provider of spatial data services to deliver end-to-end solutions for road management and maintenance in Australia. It combined a Leica Geosystems mobile mapping system, the Leica Pegasus:Two Ultimate, with Hexagon M.App Enterprise to create a high-quality, configurable solution and designed its own bespoke software platform RoadSiDe.
Veris used the mobile mapping system on the Hume and Melba Highways to identify and assess road defects and ground penetrating radar (GPR) to rapidly perform data capture of the road corridor. Then, RoadSiDe analytics and machine learning enabled the delivery of the data and insights using M.App Enterprise and Luciad Fusion, integrating 3D visualizations and 2D dashboards to identify, assess and quantify the road condition as part of the only full 3D road condition and corridor platform. The in-house solution for scripts and automation Veris developed made it simple for their clients to visualize and interact with the data, providing analytics and value-added services on demand that offered valuable insights for its clients.
As part of the surface defects workflow they use for analysis, Veris takes the raw point cloud data and compares it with the ideal road exterior to create a surface difference model, followed by contours and improved defect definition. This cross-comparison and integration allows them to use and visualize the data they acquired by precisely measuring the gaps and holes. Veris efficiently captured road cracking in detail with its additional 12MP/20MP camera system. These are then mapped into the RoadSiDe dashboard, and cracking width and length are captured within the geodatabase. Machine learning is used to detect cracks in the road surface before pixels are classified into clusters and projected onto the original images for verification and quality assurance. This can then be integrated with location coordinates, allowing clients to see precisely where each cracking is located. With this georeferenced data digitized and visualized, Veris can leverage as much of its data as possible into the most effective platform for its users.
Expanding the scope of mobile mapping
The data captured by mobile mapping solutions is just as helpful in designing roads as in maintaining them and can be incorporated into the construction of future roads and city planning. The data even can be used to simulate, for example, the movement of a heavy truck through city streets to examine whether it will impact potholes or damage any road signs, allowing asset managers to predict and prevent damage and maintain road infrastructure for years to come.
Photo: richard johnson / iStock / Getty Images Plus / Getty Images
GNSS technology has become integral to construction work. In particular, firms rely on GNSS signals in four critical areas.
Site surveys
Surveying always has been a foundational aspect of construction planning. Mapping and staking the construction site is essential in preparing to break ground and build on site. Surveyors begin the task of bringing engineering plans from vision to reality.
This work may take place from the air and on the ground, and it now typically involves a vast array of tools to ensure accuracy, including drones, cameras, lasers, sensors, and GNSS signals. The data from GNSS are critical in helping surveyors and engineers create “digital twins” — virtual representations of the physical site they can update in real time to ensure the site matches the plan.
Robotics
Robotics have further transformed the work of construction, both in terms of site surveying and the work of building. Rovers, drones and construction robots can execute various tasks to improve project efficiency and save money.
Once again, GNSS signals play a critical role in ensuring robots carry out their tasks effectively and accurately. Land surveying rovers, for instance, rely on real-time satellite data to navigate construction sites and mark spots for construction with pinpoint precision.
Damage prevention
Construction work is highly invasive, penetrating the ground where hidden power, gas and water lines lie. Misfires during this process can have substantial cost implications or even be life-threatening for construction crews.
Construction firms can use GNSS receivers and other complex instruments to prepare for excavation. These tools provide detailed location information for underground pipes and wires and ensure contractors don’t damage critical underground infrastructure and cause costly delays or dangerous work conditions.
Engineers also can use GNSS data to pinpoint where future utility lines will be, ensuring construction does not get in the way of laying pipelines to bring the constructed building online.
Site inspections
GNSS data continue to play a critical role while construction work unfolds. As builders lay foundations, frame buildings and add finishes, engineers and inspectors can collect site reports and use satellite data to update digital twins and verify the work is on track.
With updated and accurate digital twins, planners have a real-time view of the work in progress, which they can use to inform plans, budgets and timelines as the project unfolds.
The Baltic, Ukraine, and the Middle East may be hotbeds of GPS interference that can hamper UAV operations, but these are not the only places in the world where it is happening.
It also happened in San Diego at the premier event for UAV operators— the XPOTENTIAL 2024 conference of the Association for Uncrewed Vehicle Systems International (AUVSI).
AUVSI is the world’s largest nonprofit organization dedicated to the advancement of uncrewed systems and robotics. Members present included corporations and professionals from more than 60 countries involved in industry, government and academia and work in the defense, civil and commercial markets.
One of NavtechGPS’ directional finder identifies the source of interference at AUVSI’s Xpotential 2024 in San Diego. (Image: Dana Goward)
Among conference attendees were Franck and Trevor Boynton of NavtechGPS, a small Northern Virginia company specializing in GPS products and related services. One of their services is locating devices that are interfering with GPS reception.
“In our work around the country we have found a wide variety of devices interfering with GPS,” said Franck Boynton. “It’s a lot more common than you think. We found truckers with jammers interfering with port operations, for example,” he said. “But accidental interference is an even bigger problem. Most of the time we find it is just some malfunctioning equipment making the radio noise.”
Boynton’s experience is consistent with the 2019 European Union STIKE3 sampling project that detected more than 450,000 signals with the potential to interfere with GPS and other satnav signals. Experts determined that only about 10% of those were intentional. The rest seemed to be a byproduct of mechanical and electrical equipment not functioning quite properly.
Of course, intentional or accidental, interference with GPS signals can be a problem for both manned and unmanned aircraft, vessels and vehicles.
Intentional interference in conflict areas has turned UAVs and missiles away from their targets, and in some cases, back on attackers. It has impacted the safety and efficiency of aviation and maritime traffic nearby. As one example, regular jamming in the Baltic region recently resulted in the cancellation of scheduled commercial air service to a city in Estonia.
Accidental interference has caused survey UAVs to crash and created multi-day problems at the Denver and Dallas-Fort Worth major airports.
In at least one instance accidental interference almost ended in tragedy. In 2019 a commercial passenger aircraft near Sun Valley, Idaho nearly crashed into a mountain. Fortunately, a sharp-eyed radar controller hundreds of miles away intervened and directed the aircraft back on course.
Nearly 600 vendors filled the AUVSI XPOTENTIAL exhibit hall this year. While perusing the displays, the Boyntons detected a strong signal interfering with GPS frequencies. Thinking it was coming from one of the exhibits, they were surprised to find that not only did it turn off and on but it seemed to be moving around.
Using one of the direction finders that NavtechGPS sells, they were able to track the source to a film crew roaming the hall and speaking with exhibitors and attendees. The wireless microphone being used for interviews turned out to be the culprit. Since the film crew was unable to repair or replace the mic, the interference continued intermittently inside the hall for the rest of the event.
“Interference of all kinds with GPS and other satnav signals is a growing problem,” according to Franck Boynton. “As we continue to implement more autonomous systems, it will be increasingly important to ensure they have resilient navigation, and we eliminate as many sources of interference as possible.”
AUVSI did not respond to requests for comment for this story.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Photo: ESA
Detecting dark matter with atomic clocks
A team of researchers from Belgium’s Royal Observatory, SYRTE in Paris, the Université Côte d’Azur and the European Space Agency have used atomic clocks to search for dark matter transients in space. The team focused on a network of passive hydrogen masers (H-masers) on board the fleet of Galileo satellites to detect these transient variations. They presented a new technique that interprets fluctuations in fundamental constants as a specific kind of frequency modulation — a discrepancy in the expected times indicated by the satellite clocks. The findings are detailed in a paper titled “Searching for large dark matter clumps using the Galileo Satnav clock variations.”
Photo: H2L Robotics
Gardening Robots
H2L Robotics has deployed fully autonomous agricultural vehicles enabled by artificial intelligence (AI) across farmlands in the Netherlands. The robots are tasked with spotting and eliminating diseased tulip bulbs ahead of the country’s financially significant spring tulip bloom. The Selector180 robot uses GNSS to autonomously drive through tulip fields, and onboard cameras to take thousands of photos. An AI model then sorts the images, looking for potentially diseased bulbs. Finally, the Selector returns to the fields and removes diseased bulbs to prevent disease from spreading.
Photo: DoorDash
Deliveries from the sky
DoorDash has expanded its partnership with Wing to bring its UAV delivery pilot to the United States. DoorDash users who are near the Wendy’s fast food restaurant located at 2355 N. Franklin Street in Christiansburg, Virginia can order eligible menu items from the restaurant. They will see the new delivery option on the checkout page. Once they select the “drone” option, their order will be prepared and delivered via a Wing UAV within 30 minutes.
Photo: USGS
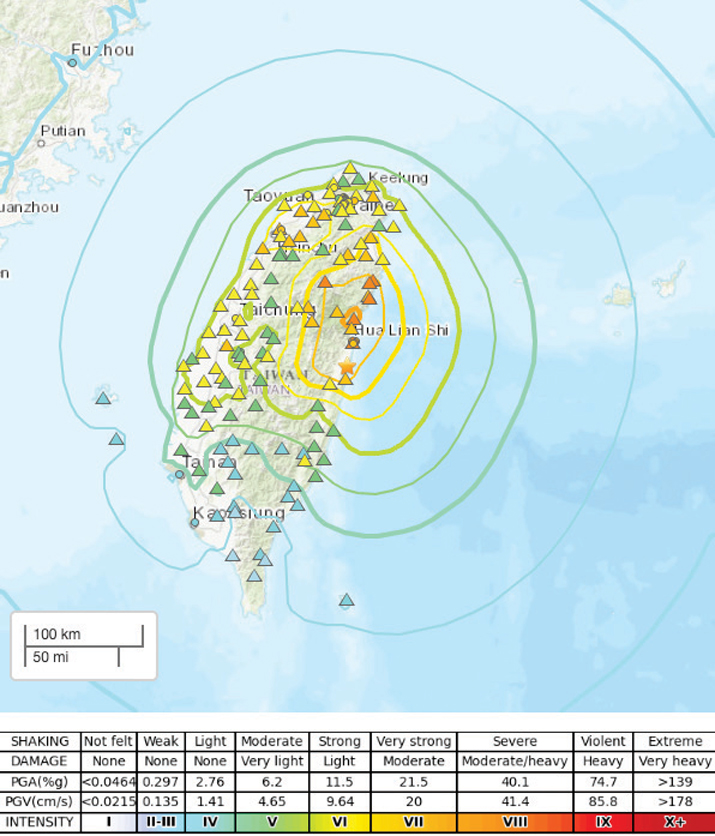
Earthquake strikes Taiwan
A 7.4-magnitude earthquake struck the eastern coast of Taiwan on April 3, according to the United States Geological Survey. USGS has released a ShakeMap providing near-real-time maps of ground motion and shaking intensity following the earthquake. According to USGS, the earthquake and aftershocks were strong enough to be felt across the island nation and parts of mainland China and Japan.
How can commercial space help bridge the GPS vulnerability gap by providing alternative PNT services?
“With the proliferation of commercial SATCOM services being launched to provide global broadband services, there is an opportunity to leverage these capabilities to also augment positioning, navigation and timing (PNT). The Defense Science Board has been directed to consider this and is evaluating how these commercial alternatives, such as PNT signals-as-a-service, could supplement GPS if technical and logistical challenges could be overcome.
With the recent announcement of Iridium buying out Satelles for $115M and the apparent interest in the U.S. Department of Defense (DOD) to consider using commercial alternatives to provide backup PNT, this is likely to spur other innovations in this space and bring more players (and investors) to the market. This has the potential to significantly increase PNT resilience around the world by enabling the use of existing SATCOM services, with a wide diversity of spectrum allocations separated from GPS, allowing operation
in a GPS-denied environment.
Deployment also can be accelerated by leveraging commercial manufacturers of SATCOM equipment who can rapidly release commercial products with alternative embedded PNT capability that can provide aiding data through the Modular Open Systems Approach (MOSA) standards already developed for A-PNT devices in the DOD acquisition process.
The major barrier to adoption of these services, however, could be the anemic funding being provided for adoption of commercial space services to Space Systems Command’s new Commercial Space Office (COMSO).”
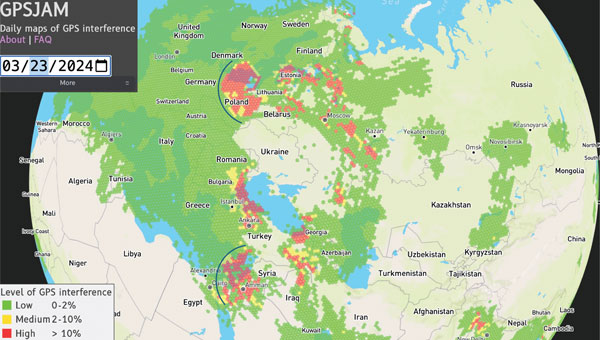
Figure 1: GPSJAM map on March 23, 2024. The map is based on GPS accuracy reports fron aircraft broadcast digital radio messages (ADS-B) over a 24-h period. A vast (uncolored) area on the globe is not covered because of no ADS-B report. Arcs are drawn over part of Europe and the eastern Mediterranean to help visualize the cone of the interference coming from potential jamming power sources. (Photo: GPSJAM.org)
GPS services are critical for real-time information on positioning, navigation and time (PNT). Because of the highly accurate and continuous PNT solution provided by GPS in all weather conditions, this multi-use technology has been adopted for civil applications including some for transportation, agriculture, aviation and emergency services. The increasing societal dependence on GPS has also created a set of security vulnerabilities for these applications.
GPS applications are vulnerable to signal interference, spoofing and degraded or denied services. Both intentional — jamming — and unintentional signal interference can cause inaccurate PNT and poor navigation performance. In addition, GPS service may be intentionally degraded or disrupted during military operations and system testing. Environments in which the GPS service is unavailable or severely degraded require alternative solutions for PNT.
Several countermeasures have been implemented to mitigate the vulnerabilities of GPS receiving systems including flex power operation and signal encryption/authorization initiated by the service provider and signal filters and adaptive antennas implemented by a user. For example, a new military signal, M-code, from GPS III satellites has an improved anti-jamming capability in both the L1 and L2 frequency bands. GPS III can broadcast signals using a high-gain directional antenna, in addition to a wide-angle, full Earth antenna, which produces a restricted area spot service by manipulating signal strength. Such flex power operations help improve GPS performance in the presence of jamming. The flex power operation is different from the so-called Selective Availability (SA), which was an intentional degradation of civilian GPS signal accuracy globally. SA operation was discontinued in May 2000, so GPS services are always available for civil applications worldwide.
However, the transparency and openness of GPS services for peaceful uses is facing a hard reality, as the balance between peacetime and wartime applications can quickly change due to geopolitical conflicts. Attacking and overcoming GPS vulnerabilities has become a fast-evolving battlefield in modern electronic warfare. Jamming and spoofing of GPS — and other GNSS — have increased substantially in the eastern Mediterranean, Baltic Sea, and Arctic regions since Russia’s invasion of Ukraine. This was officially documented by the European Union Aviation Safety Agency in Safety Information Bulletin 2022-02R1 issued in November 2023.
For example, on March 23 to 24, 2024, widespread GPS jamming occurred in Eastern Europe that impacted more than 1,600 aircraft over a period of two days and was widely reported by mass media. The source of this massive jamming event was thought to be in Russia’s Kaliningrad exclave between Lithuania and Poland. As shown in FIGURE 1, the panoramic cone in the jammed region appears to support this speculation. Similar events with large-scale jamming occurred on December 25 to 26, 2023; January 19, February 2, 12 and 14; and March 1 to 3, 13, 15 to 16 and 18, 2024, according to GPSJAM.org. In addition, Figure 1 reveals a wide area of jamming in the eastern Mediterranean where the Israel-Hamas and Israel-Hezbollah conflicts are taking place.
The increased level of GPS jamming has had a significant impact on global science observations over the conflict regions, including low-quality measurements for soil moisture, and atmospheric and ionospheric soundings, as reported in the March issue of GPS World. In addition, NASA has observed many more dropouts from in-orbit GPS receivers in recent years, which degraded the ephemeris information used for scientific data. As the pattern of apparent GPS jamming continues, alternative filtering of the spaceflight GPS data would be required to safeguard continuous science operations.
The study reported in this article aims to provide a global perspective on recent GPS jamming and degraded services. Since late 2019, commercial CubeSat constellations such as Spire have provided atmospheric measurements with much-needed global coverage and spatiotemporal sampling. The amount of GNSS data increased from about 7,000 observations per day in 2020 to about 20,000 per day in 2022 thanks to the observation demand from weather and climate research.
Table 1: Spire satellite groups and GPS satellites observed.
SPIRE CUBESAT CONSTELLATION
Spire Global has flown more than 100 Low Earth Multi-Use Receiver (LEMUR) CubeSats since 2014. These cost-effective CubeSats are used to track maritime, aviation and weather activity from space, and can be replenished at a relatively fast pace for a low-Earth orbit (LEO) constellation. TABLE 1 lists the Spire CubeSats used in this study, showing their orbital inclination, flight model ID and the tracked GPS pseudorandom noise (PRN) code ID. Spire receivers track GPS L1C/A and L2 signals for precise orbit determination (POD) and radio occultation (RO) measurements with 1-Hz and 50-Hz sampling respectively. These Spire POD and RO data collections — from November 2019 to the present — are part of a contract under NASA’s Commercial Smallsat Data Acquisition Program.
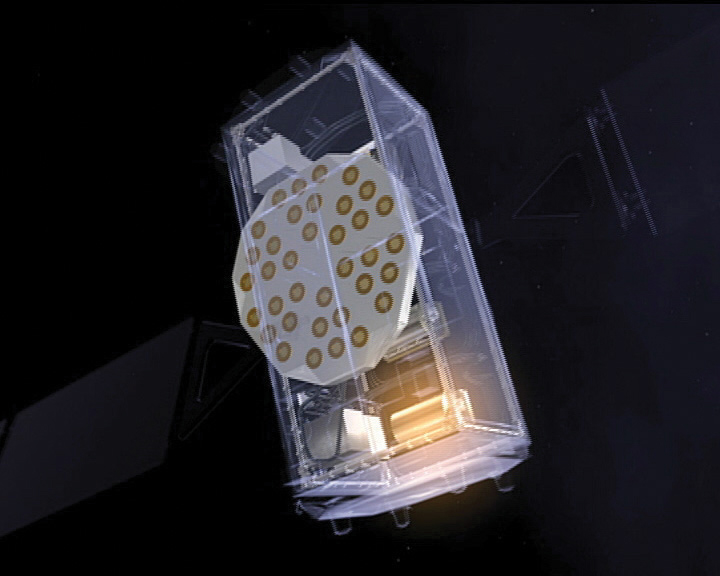
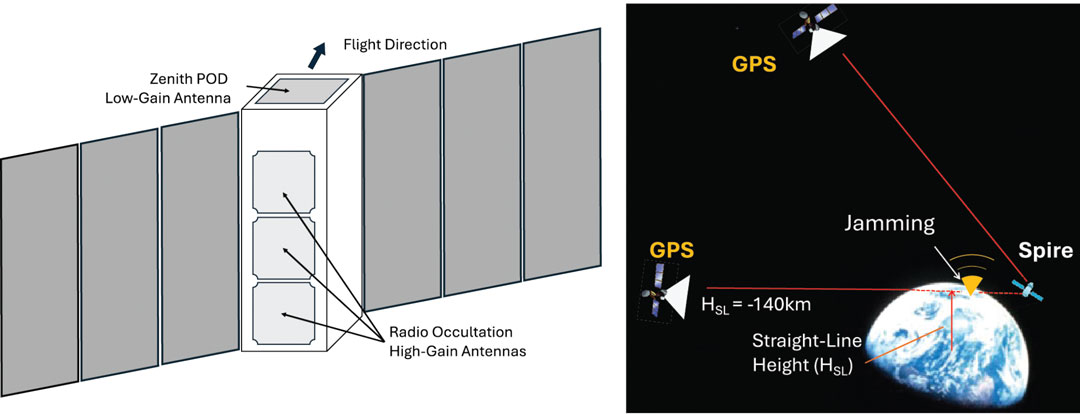
Figure 2: A schematic of the Spire 3-unit (10 x 10 x 34 cm) LEMUR CubeSat showing a zenith-view POD (precise orbit determination) and a limb-view RO (radio occultation) antenna for GPS measurements. There are usually two RO antennas on the fore-and-aft line with respect to the flight velocity, but only one POD antenna is mounted at the top. (Photo: Dong L. Wu)
The Spire LEMUR spacecraft have gone through several generations and expanded capabilities from atmospheric sounding with GPS radio occultation (GPS-RO) to GPS reflectometry (GPS-R) for soil moisture and ocean winds, grazing-angle reflectometry (GPS-GR) for sea ice and GPS-POD ionospheric sounding for space weather. In essence, however, as illustrated in FIGURE 2, these measurements are made available from two types of antennas on the satellites: a low-gain POD antenna and a high-gain RO antenna. As the measurement capability and performance improved, these antenna designs have become increasingly sophisticated and may differ substantially from satellite to satellite. Thus, it is imperative to characterize these antenna patterns carefully before comparing their signal amplitude or signal-to-noise ratio (SNR).
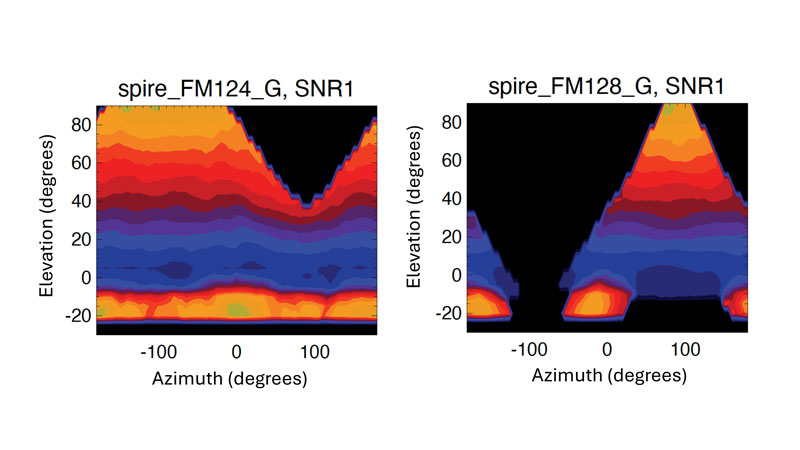
Figure 3: POD antenna patterns derived empirically from Spire FM124 and FM128 data as a function of elevation and azimuth angles. The elevation angle is defined as the angle of GPS line-of-sight (LOS) above the spacecraft horizon. The azimuth angle is defined as the difference between GPS LOS and spacecraft velocity azimuth angles with respect to the north. A 5° x 5° bin size was used in the averaging. Colors are the mean L1 SNR in arbitrary unit from two-month data aggregation. The antenna patterns of L1 and L2 signals are assumed to be same.
Instead of using ground calibration data, we employed an empirical method using the flight data to derive Spire’s POD antenna patterns. For each CubeSat, we aggregated a few months of POD data according to the GPS-POD link direction, in terms of elevation angle and azimuth angle with respect to the satellite flight direction. The averaging of such a large ensemble of measurements allows us to smooth out the fluctuations due to ionospheric scintillations and GPS service power variations. Two examples illustrated in FIGURE 3 show drastically different antenna patterns and designs between Spire FM124 and FM128. The larger antenna gain values at high positive elevation angles are expected for the commercial off-the-shelf (COTS) planar POD antenna pointing at zenith, whereas the gain at the bottom of negative elevation angle range is an added feature in this antenna design to enable a limb sounding of ionospheric electron density. To monitor the GPS service power, we use only the SNR measurements at positive elevation angles greater than 30° using the antenna pattern normalized by the mean values in this angular range.
We analyzed both Spire POD and RO SNR data. The POD SNR data are used to determine the GPS service power, while the RO SNR data are used to estimate the jamming power or jammer-to-noise ratio (JNR) from the surface. The POD SNR data at high elevation angles are mostly from free space but need to be corrected for the antenna pattern effect to measure the GPS signal strength accurately. Depending on the GPS-POD link direction, the antenna pattern can cause a large variation in the observed SNR (see Figure 3). For JNR detection, we use the RO SNR data from very low elevation angles (lower than 0°) with a straight-line height (HSL) of less than -140 kilometers. At this height, a tracked GPS satellite is completely obscured by Earth and the RO receiver is essentially measuring the receiver system’s noise. Thus, any enhanced “noise” would be considered as a jamming signal. The RO antenna pattern is less critical in this case because the locations of ground jamming sources are unknown and their signals are weak at spacecraft altitudes. Roughly speaking, the RO antennas tend to acquire signals within a horizontal field of view (FOV) of 60°, corresponding roughly to a swath of about 1,800 kilometers at the surface. Therefore, the RO JNR has a coarse spatial resolution and represents a collective emission from the ground sources.
DEGRADED SERVICE AND JAMMING
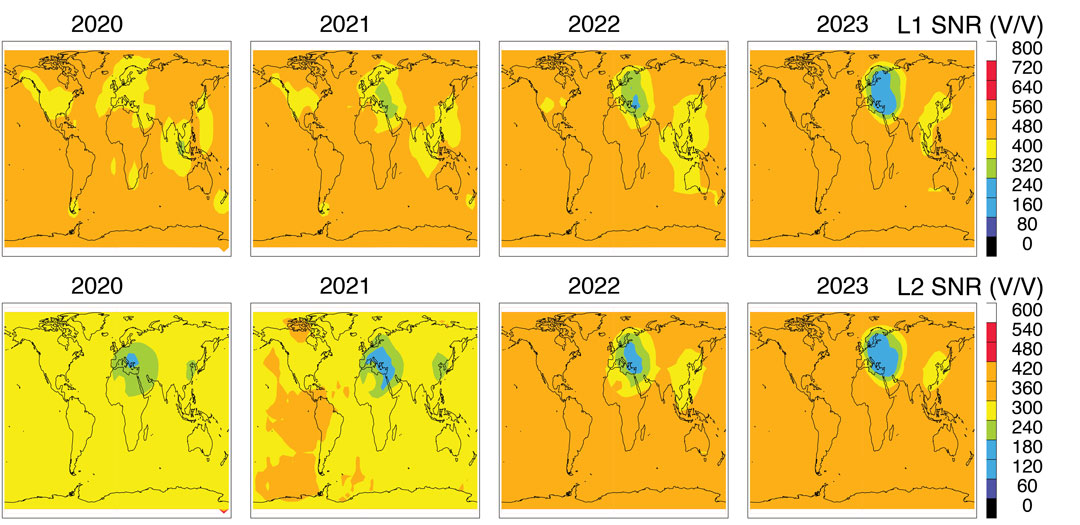
To monitor GPS service power, we normalized the Spire POD SNR with the empirically calculated antenna pattern for each CubeSat. The normalized SNR data are averaged to produce a global monthly map and then annual maps (see FIGURE 4). The L1 and L2 SNRs from Spire represent an average GPS power at an orbital altitude of about 530 kilometers. The normalized SNRs are geo-registered using the CubeSat location where the measurement was made.
Variations between different GPS satellites as well as between different Spire CubeSat altitudes are neglected in this study. Broadcasting powers from the GPS satellites may differ by a small (about 10%) amount between PRNs, which manifest themselves as a slightly inhomogeneous distribution in the maps (see Figure 4). The impacts of the Spire orbital altitude on the estimated GPS power are small, compared to the regional GPS power reduction seen over Europe.
Further improvements can be made to produce a more accurate estimate of the GPS power as well as a time series of power changes from individual PRNs.
There is a clear GPS power reduction in the L1 and L2 signals over several targeted regions. The reduction appears to differ between L1 and L2 bands during the 2020 to 2023 interval. The most prominent power reduction regions are Europe and the Middle East, where the L2 reduction started as early as 2020. Although the L1 reduction is present in this region, it deepened after 2021 and perhaps widened more in 2022 and 2023. The degraded services for a targeted region are consistent with the new capability of GPS III in operation.
Figure 4: Annual mean GPS L1 (top panel) and L2 (bottom panel) SNR distributions observed by Spire POD receivers for 2020-2023. (Photo: Dong L. Wu)
A relatively small GPS power reduction can be found in East China and Southeast Asia in the 2020 to 2023 period. The L1 power reduction in this region reveals a shift from Southeast Asia in 2019 to East China in 2023, whereas the L2 reduction appears to be concentrated in East China during these years. While geopolitical tensions in this region did not escalate to any wars, electronic warfare operations have been widely reported over the South China Sea, the East China Sea, and the Philippines since 2017.
Jamming detection from space is a more challenging task because of the generally weak JNR at the height of orbiting receivers. In addition, a wide antenna FOV of GPS receivers could yield less accurate geolocation of jamming sources. However, jamming detection has been made from several LEO satellites by various teams of scientists and engineers. By tracking the front-end noise of an RO receiver on the MetOp satellite, researchers were able to detect the elevated noise power originating from ground-based sources. Also, using the radio frequency spectra recorded with a nadir-viewing receiver on the International Space Station, investigators demonstrated the feasibility of detecting jamming and spoofing signals from the ground. It has been shown that the location of jamming/spoofing sources can be pinned down accurately with observations from two satellites. This technique laid the foundation for a new class of space intelligence missions such as the DEEP prototype, STRATOS and HawkEye-360. Studying the SNR perturbations in POD data from GRACE and COSMIC-1/2, it was possible to generate global maps of jamming hotspots from 2007 to 2016. Investigators have made use of the enhanced noise in delay Doppler maps of down-looking GPS-R receivers for jamming detection. Recently, we analyzed GPS-RO SNR measurements at the tangent heights obscured by Earth and reported the increased level of jamming in northern Africa, the Middle East and the eastern Mediterranean after 2018.
Compared to nadir-view techniques, jamming detection from limb views has some advantages and disadvantages. Disadvantages have been associated with the long path length between the source and the receiver, resulting in a potentially weak JNR and poor geolocation of jamming sources. On the other hand, if jammers chose to radiate the power horizontally for a wide areal impact, it would allow limb-view sensors to pick up the jamming power and identify the directionality of jamming sources by comparing the JNR observed from opposite look angles.
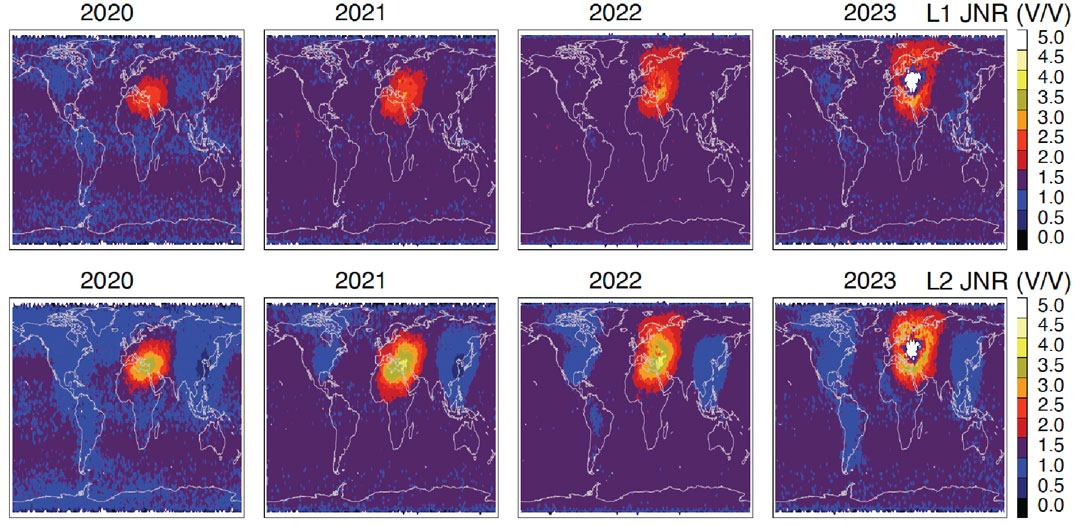
FIGURE 5 As in Fig. 4 but the L1 and L2 JNR are derived from the Spire RO SNR measurements at HSL < -140 km. A 3 V/V background noise is subtracted from the SNR measurements to obtain the JNR. In 2023 the white region inside the enhanced jamming is caused by the quality control (QC) of Spire data processing that excluded the RO data with a low free-space SNR. (Photo: Dong L. Wu)
Without any sophisticated data processing, in the study for this article, we simply averaged all the RO L1 SNR data at HSL less than 140 kilometers to extract the JNR power by subtracting a 3 V/V (volts per volt) noise from the average (see FIGURE 5). This approach is slightly different from our previous study, which normalized the JNR by the free-space SNR. Because the JNR signals were so strong in 2020 to 2023, no normalization is needed to enhance the jamming detection.
It is not surprising to see in Figure 5 that the worst GPS-jammed region appears in the Middle East and the surrounding area where geopolitical conflicts have broken out frequently in recent years. In the Syria and Libya civil wars, as well as in the Russia-Ukraine and Israel-Hamas conflicts, low-cost UAVs (commonly referred to as drones) and precision-guided munitions were widely used in attacks, which was a major incentive to deploy electronic warfare to jam GPS-guided weapons and operations.
As shown in Figure 5, the JNR power was mostly concentrated in the eastern Mediterranean, the Middle East and northern Africa in 2020 and 2021 but spread to northern Europe after Russia invaded Ukraine in 2022. More JNR power appears to be in the GPS L2 band compared to L1, likely because L2 is a weaker signal and easier to jam and degrade GPS performance in navigation applications.
The regions of GPS signal reduction and enhanced jamming are highly correlated in the Spire observations. The high correlation is expected for the increased use of militarized commercial drones and GPS-guided munitions in the conflict zones. In the Russia-Ukraine war, low-cost GPS-based commercial drones have been imported to the battlefield, as have jamming capabilities. Their modifications and tactical use are evolving rapidly as the conflict continues. A precursor of such massive use of low-cost drones was in the Libya civil war (2014 – 2020), in which thousands of airstrikes were reported. Most of these commercial-grade drones relied on GPS civilian signals for navigation. Therefore, denying or reducing the GPS civilian signal power can help degrade the performance of militarized commercial drones. On the other hand, jamming and spoofing GPS signals remains a cost-effective electronic warfare technique in these conflicts.
CONCLUSIONS
This article has provided an overview of global GPS jamming and service reduction between 2020 and 2023 using recent observations from the Spire constellation. The service power reduction and jamming power increases are highly correlated on a regional scale, showing that Europe and the Middle East have been most impacted by the ongoing geopolitical conflicts. The area of the impacted regions has widened significantly from 2021 to 2023 and spread to Northern Europe. The dual-use civil and military GPS technology and services are currently experiencing an unprecedented scale of electronic warfare attacks.
ACKNOWLEDGMENT
The work reported in this article was supported by NASA’s Commercial Smallsat Data Acquisition program.
This month’s cover story focuses on jamming and spoofing in the military domain, but this is also a big challenge for users of civilian GNSS applications, such as airline pilots. Our July cover story will focus on complementary PNT — that is, non-GNSS sources of positioning, navigation and timing data that can complement GNSS and help make up for its inherent shortcomings, such as weak signals that are easily blocked by thick foliage and roofs, multipath and few satellites in view from natural and urban canyons.
Matteo Luccio
In the coming months, we will steadily increase our coverage of complementary PNT companies, products and services, including those based on low Earth-orbiting (LEO) satellites, because they are an increasingly important component of the PNT industry. We will start by expanding our coverage of this area on our website and in our digital newsletters, then increase coverage in our print editions.
One proposal that has received scant attention, including from this magazine, is to set up a ground-based, cryptographically protected GPS High Accuracy and Robustness Service (HARS) using the internet to distribute data already being produced by the U.S. government and government-sponsored organizations. This was the subject of a white paper released in May 2023 by the National Space-Based Positioning, Navigation, and Timing Advisory Board.
The paper argued that GPS is “falling behind” other GNSS because it relies on augmentation by third-party systems rather than providing such specialized advanced services itself, as BeiDou and Galileo do. While nearly all GNSS chips currently acquire first GPS signals, then those from other systems, deployment by BeiDou and Galileo of sub-meter accuracy services may lead chip manufacturers to reverse this order. If they do, the paper argued, it will cause the U.S. government to lose its strategic advantage in this area and put it in the same position that led the Chinese and European governments to launch their own GNSS programs.
The paper proposed a HARS that would remove satellite orbit and clock errors, ionospheric errors, and tropospheric errors and enhance the ability of GNSS receivers to operate in challenging conditions. This approach, the paper says, could allow Precise Point Positioning (PPP), authentication, and more. It would be “secure and less sensitive to radio noise and disruptions,” protect critical infrastructure, and enable new applications, such as “lane-dependent route guidance in automobile navigation and emergency vehicle guidance.” Additionally, by delivering, along with the corrections, cryptographically signed ephemeris on the same channel, the system would solve the problem of spoofed navigation data.
All of this could be done “without adding cost and complexity to GPS itself” resulting in “a world-class HARS at a small fraction of the cost or time, compared to implementing it on new GPS satellites.” The paper asked for funding for this new service and an agency to operate it, such as the U.S. Space Force or the federal Department of Transportation.
I thank John Betz, Ph.D., of MITRE, for bringing the PNT Advisory Board’s white paper on HARS to my attention. It can be found here.
The European Space Agency (ESA) has selected Syntony GNSS to supply user demonstration receivers for its low-Earth orbit positioning, navigation and timing (LEO-PNT) project.
Led by Thales Alenia Space and funded by ESA, the first European LEO-PNT project aims to enhance PNT services from LEO. This initiative is expected to improve the accuracy and reliability of navigation systems, serving a wide range of applications, from critical emergency services to everyday technologies.
Syntony will provide its ground receivers, compatible with the new LEO/PNT signals, as well as with GPS and Galileo systems. These receivers will initially assess the performance of signals from the constellation, which will start with fewer than 10 satellites. There will be 100 to 600 satellites when the constellation is complete, according to Syntony.
Although the receivers may not always be able to calculate position, velocity, and time (PVT) due to the lack of available satellites, they will be essential in evaluating signal performance when at least four satellites are visible. This allows for PVT calculations and performance comparisons with existing GNSS systems.
Syntony’s software-defined radio (SDR) receivers enable real-time adjustments to the receiver settings to evaluate the constellation’s performance. This can be achieved without any hardware changes, as the LEO-PNT constellation uses frequencies similar to those used by the medium-Earth orbit (MEO) GNSS systems.
Syntony’s Constellator GNSS Simulator will be updated to incorporate the constellation’s signals as soon as they are available. This process is similar to how the signals from Xona Space Systems’ PULSAR constellation were integrated as early as 2022.
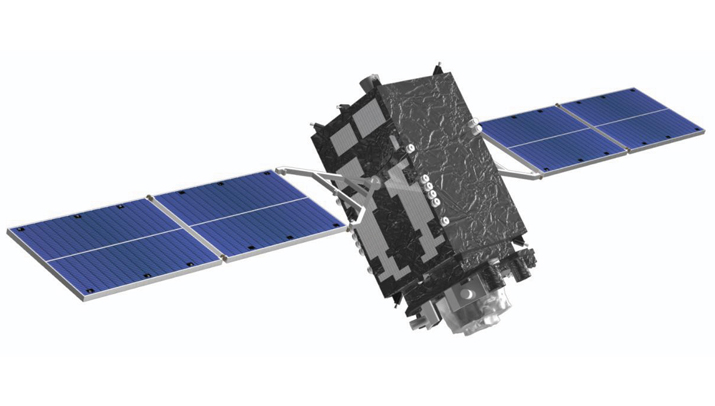
In early 2015, the Navigation Support Office of the European Space Agency (ESA) and the Japan Aerospace Exploration Agency (JAXA) began a collaboration. At its core, the ESA-JAXA collaboration is designed to cross-validate Japan’s Quasi-Zenith Satellite System (QZSS) Precise Orbit Determination (POD) results and share expertise to improve the POD accuracy of QZSS.
The cross-validation of the QZSS POD performance was implemented by jointly analyzing QZSS observations and validating the POD results of the QZSS satellites. As a result of this joint activity, ESA and JAXA have significantly improved the robustness and accuracy of their respective POD products. This collaborative approach not only ensures the continuous improvement of QZSS force modeling and precise orbit determination performance but also demonstrates the effectiveness of international cooperation in advancing the field of space navigation, especially as the benefits of GNSS interoperability become very evident.
An important milestone in this collaboration was ESA’s role in supporting the In-Orbit Testing (IOT) activities for QZS-1R towards the end of 2021. The successful execution of these tests demonstrated the practical results of the ESA-JAXA partnership and further solidified the commitment of both agencies to enhance their capabilities for QZSS POD and associated products.
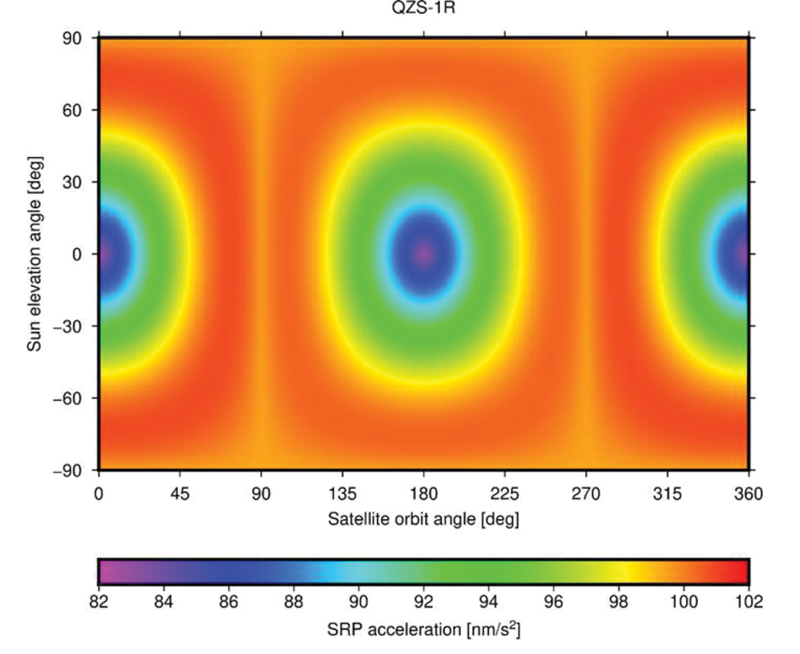
FIGURE 1 ESA’s Solar Radiation Pressure (SRP) model output in satellite-Sun frame.
The benefits of this collaboration extend beyond the agencies to the entire scientific community. Notable achievements include the revision of metadata for the QZSS constellation, such as the optical properties of the QZS-1 solar arrays, which have been refined and improved through shared expertise, while simultaneously releasing the satellite mass and attitude mode history in a machine-readable file format for easy access and adoption by the users.
To evaluate the spacecraft models and metadata for QZS-1R prior to their public release, ESA and JAXA conducted several comparative tests. Since both organizations use different software packages for satellite POD — ESA uses NAPEOS (Dow, Springer 2009, Enderle et al., 2019 and 2022) and JAXA uses MADOCA (Kawate et al., 2023) — their results can be considered as largely independent. One comparison involved the Solar Radiation Pressure (SRP) model results produced by both organizations. FIGURE 1 shows the accelerations in satellite-Sun frame computed by ESA’s SRP model. The comparison of the computed SRP accelerations in different reference frames, spacecraft-fixed and inertial, showed excellent agreement with differences of less than 0.1 nm/s².
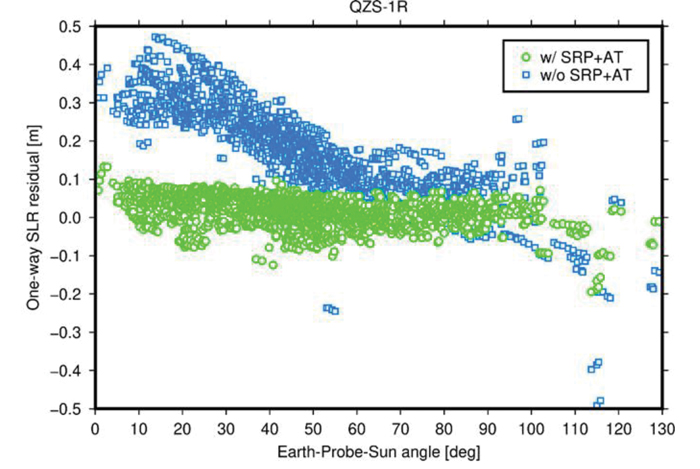
FIGURE 2 One-way Satellite Laser Ranging (SLR) range residuals calculated with respect to QZS- 1R orbits generated with (green) and without (blue) a-priori radiation force models and displayed as function of the Earth-Probe-Sun angle.
In addition, pseudo-range and carrier phase dual-frequency measurement data from 200 tracking stations of the International GNSS Service (IGS) network were used to generate precise QZS-1R satellite orbits and clock offsets on a day-to-day basis over a 12-month period spanning from January to December 2022. Comparison between ESA and JAXA solutions yielded a root-mean-square (RMS) agreement of 8.6 centimeters (orbit) and 0.21 nanoseconds (clock), respectively. Analysis of Satellite Laser Ranging (SLR) data from seven stations of the International Laser Ranging Service (ILRS) suggests a radial RMS accuracy of the generated orbital trajectories of about 4 cm. Without applying the analytical models for SRP and other non-gravitational perturbation forces, such as antenna thrust (AT), the RMS accuracy decreases by a factor of five (FIGURE 2).
In conclusion, the ESA-JAXA collaboration on Japanese Quasi-Zenith Satellite System POD has been a resounding success. Through this continuous and mutual support, performance cross-validation and knowledge sharing, significant improvements related to modeling and subsequently to POD accuracy could be achieved for ESA as well as for JAXA. Additionally, the global scientific community benefitted from this ESA/JAXA collaboration via improved QZSS POD products and validated metadata.
The ongoing conflict between Hamas and Israel, along with the unrest in various universities across the United States in support of Gaza Palestinians, and the continued aggression by the Houthi rebels in Yemen against shipping, are impacting several aspects of our lives, including the rising cost of gasoline.
Since the United States began seeking out Houthi strongholds, it is now being reported that another MQ-9 Reaper drone has been shot down – making an apparent total of five such expensive U.S. UAVs lost over and around Yemen, according to US military reports.
Screenshot of a Houthi-released video of the downing of the MQ-9 Reaper drone (Photo: UAS Vision)
At $30 million each, compared to about $2 million for a surface-to-air missile, the Houthis are apparently ahead on cost. With a 50,000 ft ceiling, the Reaper is capable of avoiding short-range surface-to-air missiles. However, more visual or infra-red (IR) low-level detail may have been sought on this mission. In response, the U.S. military reported the downing of five Houthi UAVs over the Red Sea.
According to a Defense Intelligence Agency (DIA) report, Iran is supplying the Houthis with attack UAVs and longer-range missiles, which are often, if not always, re-assembled, repainted and re-named locally. The DIA said that one of the favorite Kamikaze UAVs used is the Iranian Shahed-136/Houthi Waid-2, which is reported to have a range of almost 1,600 miles. Neither side has yet acknowledged which drones were brought down by the United States.
However, around the same time, it was reported that perhaps two Houthi missiles hit the MV Andromeda Star oil tanker with reportedly little damage — no casualties were reported on the ship as it continued towards its destination Vadinar, India. Another ship, the MV Maisha, avoided a third missile. The missile landed nearby in the water, but the vessel put some distance between itself and the MV Andromeda, continuing safely.
The US/UK forces operating in the Red Sea have countered the more than 100 Houthi attacks on shipping with several airborne strikes on Houthi facilities. This renewed Houthi action over the weekend is thought to have been possible because they were restocked with weapons following the US/UK airstrikes, which slowed their attacks on shipping.
Hence the renewed threat to oil tanker traffic in the Red Sea has raised the already high threat level, and increased oil and gas prices at the pump are one of the consequences.
Meanwhile, Pakistan has bought 10 additional Chinese Caihong-4, which reportedly look and perform very similarly to the MQ-9 Reaper.
Caihong-4 looks very similar to the General Atomics MQ-9 Reaper (Photo: OE Data Integration Network (ODIN))
The CH-4 can be used for both attack and reconnaissance. It features a flight endurance of 30 to 40 hours, a range of 2,200 to 3,100 miles and can carry up to six weapons.
This brings Pakistan’s complement to 20 CH-4 UAVs. The new purchase may be to offset India’s purchase of 31 General Atomics MQ-9s, which is included in a huge, recently approved $3.99 billion weapons purchase from the United States. The two countries continue to feud over the contested Kashmir region.
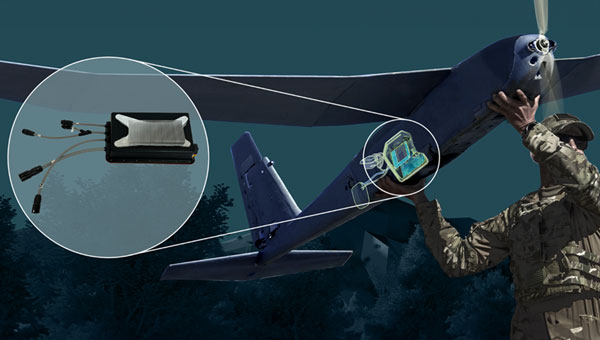
AeroVironment (AV) has developed an add-on for fielded Puma class hand-launched reconnaissance UAVs, which brings autonomy and machine-learning to a worldwide, mostly military fleet of thousands of air vehicles. Referred to as the Autonomy Retrofit Kit (ARK), with AVACORE software, the new update allows operators to command and control one or more vehicles autonomously. This provides computer vision capabilities and enables connection to a distributed, mobile comms network to access data for several separated operating groups.
ARK retrofit kit for Puma 3AE and LE UAVs (Photo: AV)
According to AV, autonomous operating tasking is possible when communications are jammed and the UAV is then still able to execute its mission without manual input. Updated computer vision allows finding, classifying, positioning and daylight or nighttime tracking of objects such as people, vehicles, aircraft and ships. AVACORE includes several software interfaces for different autopilots, sensors and radios to provide integration flexibility.
A neat way to provide significantly enhanced capability for already fielded airborne vehicles when they have some downtime.
Finally, we have a short introduction to a new transport UAV being put together by a California company called MightyFly. The company is led by a woman who was highly instrumental in the success of the flight controls for the Zipline UAV, which is still blazing drone delivery trails overseas and now in North America — with more than one million deliveries. With advisory input from a retired FedEx exec, the team at MightyFly seems well on their way with both a Federal Aviation Administration (FAA) approved Part 135 application and a 20 mile ‘point-to-point’ flight corridor approval for test flights.
Cento gen 3 cargo drone (Photo: MightyFly)
The MF-100 prototype made its first flight and demonstration delivery in April 2021, while the third-generation Cento flew for the first time in December 2022. Cento has a 6’ x 1’ x 1’ cargo hold that can accommodate 96 small USPS packages, weighing up to 100lb and Cento and later models are expected to have a range of 600 miles at up to 150 mph. While their UAVs are currently all-electric, the plan is to add a gas/rotary engine to charge batteries to achieve this forecast range for the drone.
MightyFly has significant support from the U.S. Air Force Agility Prime program and the Air Mobility Command, who continue to invest in autonomous cargo developments as an alternative to leasing helicopters to transport parts, medical supplies and more. MightyFly came up with an auto-loading capability, which resolves the issue of a potentially changing weight and balance of a last-mile cargo drone.
Jamming and spoofing continue to be the key challenges to military use of GNSS. While the production and adoption of M-Code receivers is delayed, defense contractors are developing several approaches to identify, locate and neutralize these threats — including CRPA antennas, embedded GPS inertial (EGI) navigators, software-defined radios and cryptography.
In this month’s cover story, executives from seven companies present their perspectives on the GNSS/PNT challenges faced by U.S. and allied military forces, their market niche in this area, and their latest products.
Lou Pelosi, vice president, CAST Navigation
Stig Pedersen, executive vice president of aerospace and defense, Autonomy & Positioning division, Hexagon
Brandon Malatest, COO, Per Vices Corporation
Tony Full, director of business development, Navigation Systems, Safran Federal Systems
Paul Crampton, senior solutions architect, Spirent Federal Systems
Joel Korsakissok, president, Syntony
Click here to read an exclusive interview with Chuck Stoffer, director of business development and Eric Hughes, design engineer, UHU Technologies
Read the related “Innovation” article.
Photo: Petty Officer 1st Class Thomas Gooley
What are currently the top two or three challenges regarding GNSS/PNT for U.S. and allied military forces? How do you expect that to change in the next three to five years?
CAST Navigation
A top challenge is anti-jamming. GPS signals are low-power and fairly easy to jam. CAST has developed a simulator for testing controlled reception pattern antennas (CRPAs), which are anti-jam antennas. CAST simulators can test CRPAs with two to seven antenna elements.
Another top challenge is preventing our enemies from using GPS in a war zone. M-Code Modernized Navstar Security Algorithm (MNSA) has been designed to support denial of GPS signals to enemy forces. CAST has developed the ability to simulate M-Code MNSA. The company is working closely with the U.S. Space Force Space Systems Command’s GPS Directorate to develop a simulator that supports all their requirements.
Hexagon
Jamming is the key challenge. The secondary challenge is getting necessary protection into fielded systems so they can be used to the full extent of their service life. Over the next three to five years, while new products designed to safeguard PNT infrastructure will emerge, the process of getting these tools authorized and integrated will remain complex.
Per Vices Corporation
GNSS signals can be disrupted or manipulated by adversaries through jamming techniques, leading to potential navigational errors or loss of positioning capabilities. Advanced spoofing techniques also pose significant challenges to GNSS/PNT for U.S. and allied military forces, as they can deceive receivers into providing inaccurate positioning, navigation, and timing information. Both can be addressed with the integration of software-defined radios (SDR) for GNSS/PNT applications where we anticipate a strong push to further advance the different anti-jamming and anti-spoofing techniques in software using high-performance SDR platforms.
Safran Federal Systems
GNSS denial and spoofing. Both challenges are expected to become more pervasive over the coming years as adversarial technologies evolve and are distributed. In the current conflict, systems are driving to become either assured GNSS or built to operate independently of GNSS clock and position information.
Spirent Federal Systems
Adversarial near-peer threats to PNT integrity are developing at an increasingly rapid pace. Navigation warfare (NAVWAR) used to focus within the boundaries of localized geopolitical conflicts, but now space-based, system-wide threats loom large and will present new challenges in the coming years. As PNT continues to evolve, more complex mitigation technologies must be integrated into a layered PNT ecosystem with shortened development and testing phases to be fielded faster.
Syntony
It is not a secret that jamming and spoofing will be the biggest challenges in the coming years: Almost every week, if not every day, we read some news about jammed or spoofed GNSS receivers, either in Eastern Europe or elsewhere.
Technology exists to protect against both threats: authentication, cryptography and CRPA. However, you cannot deliver an M-Code or PRS receiver to every soldier and every vehicle, if for no other reason than the difficulty of broadcasting the keys. The solution will pass by an intermediate level of anti-jamming and anti-spoofing receivers, which do not need them, associated to moderate prices and lighter infrastructure so that everybody and every vehicle can be protected.
For industry, it will pass through the generalization of CRPA architecture for the receivers, even for non-encrypted signals, and even with lower efficiency levels (update rate, J/S, etc.) corresponding to low dynamic movement.
What is your company’s niche regarding military GNSS/PNT?
senior software engineer Neil O’Brien utilizing a CAST-8000 GNSS simulator to analyze CRPA trajectory data. (Photo: CAST Navigation)
CAST Navigation
We are known for correctly interfacing with the military’s embedded GPS inertial (EGI) navigators.
Hexagon
We have carved out a distinctive position in the military APNT sector. We provide receivers that give users access to the entire GNSS spectrum, fortified by our unique GNSS Resilience and Integrity Technology (GRIT). Hexagon also produces anti-jam antennas designed to safeguard GNSS receivers, offering our customers tested protection in hostile environments.
Per Vices Corporation
We design, develop, and build high performance software-defined radio platforms and associated firmware/software for use in GNSS/PNT systems. This includes the use of SDRs for simulating hostile RF environments to test existing equipment, providing anti-jamming and anti-spoofing solutions, implementing dynamic frequency hopping, and signal authentication and integrity verification.
Safran Federal Systems
We are uniquely positioned to fulfill solutions to GNSS denial and spoofing through our precision timing, assured GNSS (M-Code/SAASM) and inertial navigation technologies. Additionally, we have these technologies often combined in different form factors to serve platform needs. When planning for missions, we offer our customers a full suite of mission simulation capabilities expediting the fielding of technologies by assuring functionality in a lab environment.
Spirent Federal Systems
We find our niche in partnering with industry and military institutions to provide innovative test solutions. Spirent NAVWAR test solutions enable PNT receivers to mitigate the effects of current and prospective threats. This involves new secure encrypted signals, space-based assets in a variety of orbital configurations, antenna and processing techniques, non-U.S. PNT systems, and non-satellite sensors to name a few. Research into potentially useful PNT systems is also efficiently conducted using simulation techniques — without the need to develop and iterate expensive hardware. Working with industry and military partners allows Spirent Federal to engage at the earliest stages of research and development, allowing system integrators to benefit from the same test methodologies used by the developers.
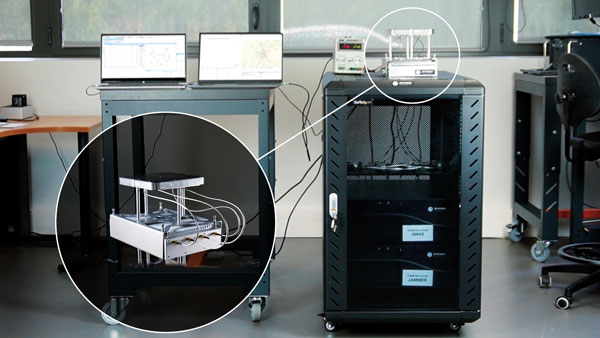
Cerber CRPA receiver with four-channel antenna and Constellator CRPA simulator. (Photo: Syntony)
Syntony
We have developed two technologies aiming at addressing this problem: a high-end CRPA receiver based on non-encrypted GPS/Galileo signals bringing state-of-the-art anti-jamming capabilities and anti-spoofing ones even with open signals, and the same for high-end 4 CRPA simulators with up to 8 channels. We developed the latter with the U.S. company Keysight and will demonstrate it at ION Joint Navigation Conference (JNC) 2024.
What is your latest product in this area? What are its key specs? What is/are its main application/mission area/s?
CAST Navigation
We have merged the EGI test capability with a CRPA tester. This allows testing an EGI that is driven by a CRPA in a jamming environment. This simulator also will be available with M-Code MNSA in the future.
a hexagon gajt in action on a U.S. Army M1A2 Abrams tank. (Photo: Sgt. Andrew Greenwood)
Hexagon
GPS Anti-Jam Technology (GAJT) antennas from Hexagon’s Autonomy & Positioning division mitigate against jammers to ensure the continuous signals required for calculating position and time remain available. GAJT is a commercial off-the-shelf product, which ensures short-order lead times and quick deployment. GAJT antennas from Hexagon can protect against between two and six simultaneous jammers. In addition to protection, they provide situational awareness messages to indicate the presence of jammers.
Our upcoming product in this area is an anti-jam antenna characterized by its low size, weight, power and cost (SWaP-C). It will protect L1/L2 and pass through all other GNSS signals to ensure resilient positioning. This addition to the battle-tested GAJT product family means that powerful, proven anti-jam protection will be available for all platforms, including UAVs. GAJTs provide assured and resilient PNT data for NATO forces worldwide on land, at sea and in the air.
PER vices cyan software-defined radio for GNSS/PNT applications. (Photo: Per Vices)
Per Vices Corporation
Our latest product in this area is our Cyan SDR, which offers up to 16 radio chains, tuning frequency spanning all GNSS/PNT frequency bands (near DC to 18 GHz), a high performance FPGA SoC on-board (Intel/Altera Stratix 10), and multiple inputs and outputs for timing and synchronization with other equipment. This system has been utilized for many applications in this space due to its flexibility, performance, form factor (19″ 3U), and value.
SAFran federal systems’ Geonyx inertial navigation solution, which can be integrated with VersaPNT, Safran’s all-in-one Assured PNT device. (Photo: Safran Federal Systems)
Safran Federal Systems
Safran’s Versa-PNT product coupled with a Geonyx inertial navigator offers rubidium oscillator precision timing, M-Code receiver and navigation-grade inertial technology, all in a package that can support land or maritime operations. More specifically, this package delivers:
P — M-Code receiver.
N — < 0.02% drift over the traveled distance (~2 m over 10 km, GPS accuracy).
T — One-day holdover below 1 µs.
Photo: Spirent Communications
Spirent Federal Systems
The PNT X is Spirent’s innovative sixth-generation simulation platform, which launched at the end of April and will debut at the ION JNC 2024 in June. PNT X offers a new era in NAVWAR testing, with a record 140 dB high dynamic range to simulate high-powered jammers and spoofers. It offers a 2,000+ Hz update rate for a highly accurate representation of the motion of missiles, rockets, and UAVs, thereby guaranteeing the integrity of test results.
The platform includes spatial awareness simulation for jammers and signals of opportunity, overlaying motion on user-defined signals and jammers alongside the simulation of the local environment and terrain.
The PNT X uses Spirent’s custom-built software-defined radios to extend capacity, automation and ease of use for testing current and future PNT sources. Designed for secure environments, the simulation solution features the first M-Code Regional Military Protection (RMP) test capability. Spirent experts are available to assist with generating test scenarios and capitalizing on new automation and interoperability features.
Syntony
The CRPA simulator that we will market together with Keysight will support all available GNSS signals and carrier frequencies. It also will be expandable by a software upgrade to LEO PNT in the near future. With typically four or eight channels,130dB of J/S, and based on the unique generator of Keysight VXG-C (2.5 Ghz instantaneous bandwidth, providing high-level phase synchronization all along the band), it will generate all the GNSS signals in L and S bands through one RF channel, bringing unrivaled performance and ease of calibration.
In my November 2023 GPS World newsletter, I highlighted the announcement made by the National Geodetic Survey (NGS) of the recipients of the National Oceanic and Atmospheric Administration (NOAA) FY 23 Geospatial Modeling Competition awards. The primary objectives of these projects are to modernize geodetic tools and models and to develop a geodetic workforce for the future. My last three GPS World newsletters — February 2024, March 2024 and April 2024 — highlighted three of the grantees, Scripps Institution of Oceanography, The Ohio State University, and Oregon State University that included developing models to address what NGS denotes as the Intra-Frame Deformation Model (IFDM) and creating geodesy curriculums that will help address the geodesy crisis. Changes in these geomatic programs will provide students with the skills in geospatial systems that will make available opportunities for employment in the public and private sectors. This newsletter will address the proposal by the fourth NGS geospatial modeling grant awardee, Michigan State University (MSU).
First, it should be noted that this award is denoted as the MSU geospatial modeling award; that said, the execution of the project will be led by MSU, along with two sub-awardees — University of Alaska Fairbanks (UAF) and Michigan Tech University (MTU). Jeffrey Freymueller and Julie Elliott are the MSU grant’s principal investigators (PI). They provided me with information about the goals and objectives of their grant proposal.
The MSU proposal includes enhancing software and monitoring capabilities for NGS, enhancing graduate-level geodetic education and providing opportunities for graduate and undergraduate students to be exposed to geodetic science. Again, focusing on geodesy curriculums will help address the geodesy crisis and will provide students with the skills in geospatial systems that will increase their opportunities for employment in the public and private sectors. The proposal has two main goals and objectives.
Goals and objectives
CORS Dashboard
Build an online, web-based CORS dashboard that will support monitoring of the continuously operating reference station (CORS) network.
Making it easier to continually validate the current position of CORS sites to the existing motion models (IFDM).
To validate and correct the motion models themselves in the presence of time-dependent tectonic and volcanic activity.
Education
Work with partner universities toward developing and establishing a consortium model for future distributed geodetic degree programs that leverage the capabilities and capacity of multiple universities.
Develop new course material for graduate level geodetic education that is intended for hybrid or asynchronous remote delivery and the establishment of a formal degree program.
Host summer undergraduate interns who will work on a variety of geodetic projects including the CORS dashboard.
Two graduate students will be supported to work on various aspects of the proposed work at MSU and MTU.
Anyone using NGS’s “user-friendly” software knows that they are working on improving their web-based services. However, NGS still needs help from outside users.
I want to emphasize that I am not criticizing NGS’s products and services. I worked for NGS for over three decades, and I personally know that NGS has limited resources to accomplish too many tasks. NGS needs to focus on the science and get help with the development of models, tools and the dissemination of results and data. That is one of the reasons that these geospatial modeling grants are important to all users of the National Spatial Reference System (NSRS).
The proposed CORS Dashboard will be very useful to NGS employees monitoring the CORS and evaluating the IFDM. The proposal highlights that users of NGS products and services have various precision and accuracy requirements and that all users expect that NGS products will be sufficiently precise and accurate to meet their positioning needs. Their design of the CORS Dashboard will provide a tool for effectively monitoring and assessing a CORS site status and the validity of its coordinates. The first phase of this tool is being developed for internal use at NGS. However, in my opinion, after all the bugs have been identified and dealt with, NGS will release a version for the user.
Not all CORS are created equal. So, having a CORS Dashboard that quickly identifies and notifies CORS users of a systematic deviation at a site, regardless of cause, will avoid promulgating erroneous positions to users. In addition, providing statistical information about a CORS site such as short- and long-term plots and their residuals would provide users with helpful information for planning a GNSS project. The metadata of CORS is extremely important since most of the CORS included in the NOAA CORS Network are not maintained by NGS.
CORS managers are supposed to notify NGS when they make any change to their CORS site such as an antenna change and any changes surrounding the CORS site, including new vegetation or construction that could cause potential obstructions. The CORS Dashboard will help identify issues with CORS before users include them in their projects.
NGS’s OPUS Project online user guide provides information on selecting the best CORS. The following is from the user guide:
Using the centered time-series plots, select the candidates with RMS (in northing, easting, and up) less than 2 cm. Candidates with large spikes, data gaps or discontinuities should be rejected. Selecting candidates in this manner will provide some assurance that the published coordinates and velocities at the CORS agree with the daily solutions for the CORS.
The best CORSs should have “consistent” data depicted in 90-day short-term time-series plots. NGS processes each day of GNSS data collected at each CORS and plots the differences between the resulting coordinates and the published coordinates on short-term time-series plots (in terms of delta northing, easting, and up). These plots can be accessed for every CORS at https://geodesy.noaa.gov/corsdata/Plots/. CORS with plots that depict significant biases from the published coordinates (more than 2 cm in northing, easting, or more than 4 cm), spikes or data gaps should be avoided.
NGS has developed a Beta CORS Time Series Tool that provides information that assists users in the selection of appropriate CORS for a project. The tool computes and displays the residual differences from the daily NGS OPUS-NET solutions with the coordinates from the official CORS’ coordinate functions. The tool also generates a summary table with the mean, standard deviation, and root-mean-square error of the residuals. On April 24, 2024, NGS announced the release of a beta version of a new NOAA CORS Network (NCN) Station Web Page. According to the announcement, each CORS in the NCN will have its own page with data, metadata, maps and photos for that station displayed in a modular layout so information is easily found all in one location. I will describe this new beta site in a future newsletter.
The new, modernized NSRS will offer time-dependent coordinates based on an IFDM. This has been described in previous GPS World newsletters (February 2022 and August 2022). The MSU proposal includes developing a model that accounts for crustal movements — such as earthquakes, slow slip events, and volcanic eruptions, — as well as slower, cumulative growth of error due to post-seismic deformation, surface loading (ice or water changes) and changes in rates of human-induced subsidence due to fluid withdrawal. Like any model, the IFDM model will have uncertainties. Being able to provide a realistic estimate of the uncertainties of the IFDM is very important. The PIs of the proposal have extensive knowledge and experience in generating models and uncertainties. As noted in their proposal, the “problem” may not be an issue with the site or the equipment but with the model. See the box titled “Excerpt from the MSU Proposal.” I have highlighted several sections that I believe are important to the users of the new, modernized NSRS.
As anyone who has been following my newsletters knows, I have been highlighting the geodesy crisis and programs that advance the science of geodesy — July 2020, November 2022, and December 2022. The proposal includes developing geodetic science courses that will be optimized for hybrid or asynchronous online courses that address advanced technical topics on GNSS, InSAR, map projections, reference frames, and adjustment theory. This will build on existing programs at MSU, UAF and MTU that will provide an online graduate degree in geodesy. MSU envisions this to be a step toward a consortium-based enhanced graduate-level education that provides a range of course options and flexibility. The university believes that there will be opportunities to expand the consortium in the future. The courses have not been finalized yet, but below are some of the topics and concepts that are being considered for the program.
Topics and Concepts
Map Projections
Map projections, geodetic datums, grid systems and transformations. Use of mapping software including GMT.
Geodetic Models
Course provides solid geospatial background in geodetic reference frames, datums, geoids and reference ellipsoids. 2D and 3D geodetic network adjustments are considered based on 3D spherical models.
Modern Geodesy and Applications
Modern geodetic methods including GPS, measuring steady or time-variable motions, the physical models that are used to interpret these observations and applications to active geological processes, the cryosphere and hydrology.
Geodetic Methods and Applications
Theory and application of modern geodetic tools to measure Earth’s surface deformation with emphasis on GPS and InSAR. Basics of data processing; evaluation of signals and modeling of their sources; applications include magma systems, earthquake cycle and hydro- and cryosphere. Labs in Python require programming experience
Geodetic Data Processing and Analysis
Course provides students hands-on experience in the selection, processing and analysis of geodetic data sets, particularly InSAR and GNSS. Selection of data from diverse sources, evaluation of data strengths and weaknesses, processing and analysis of data and application to the investigation of geological problems.
Solid Earth Geophysics and Geodynamics
Theory and applications of solid-Earth geophysics including geochronology, geothermics, geomagnetism and paleomagnetism, geodesy and gravity, rheology and seismology.
Foundations of Geophysics
Applications of continuum mechanics, heat flow theory and potential theory to geophysical, geologic and glaciological problems. Topics such as postglacial rebound, non-Newtonian fluid flow, thermal convection, stress-relaxation, rheology of Earth materials, gravity and magnetics will be discussed. Emphasis will be placed on methods and tools for solving a variety of problems in global and regional geophysics and the geophysical interpretation of solutions.
Positioning with GNSS
In-depth study of GPS, GLONASS, Galileo, COMPASS satellite systems; theory and processing of global positioning measurements.
Intro Numerical Tools for Earth and Environmental Sciences
Introduction to Linux and C including numerical methods, integration, curve-fitting and differential equations with an emphasis on applications to the geological sciences.
Programming and Automation for Geoscientists
Basic concepts of computer programming and effective task automation for computers, with an emphasis on tools and problems common to the geosciences and other physical sciences. Use of Python, Jupyter Notebooks, shell scripting and command line tools, making scientific figures, maps and visualizations.
Data Analysis and Adjustments
Course explores fundamentals of mathematical error propagation theory, including various observation equations, least squares adjustment and Kalman filter methods. Blunder detection, decorrelation and inversion of patterned large matrices processes are considered. Involves analysis of position estimation deploying geospatial measurements.
Inverse Problems and Parameter Estimation
An inverse problem uses observations to infer properties of an unknown physical model. This course covers methods for solving inverse problems, including numerous examples arising in the natural sciences. Topics include linear regression, method of least squares, estimation of uncertainties, iterative optimization and probabilistic (Bayesian) and sampling approaches.
Numerical Analysis
Direct and iterative solutions of systems of equations, interpolation, numerical differentiation and integration, numerical solutions of ordinary differential equations and error analysis.
3D Surveying and Modeling with Laser Scanning Data
Theory and application of terrestrial lidar scanning. Typical application scenarios are also included. Intensive lab component provides hands-on experience in lidar point cloud processing and visualization.
Fundamentals of spaceborne imaging systems relevant to topographic mapping. Imagery products —preprocessing levels and metadata. Specific methods of space photogrammetry. Review of contemporary spaceborne imaging systems and imagery products available. Airborne non-frame sensors and photogrammetric processing of the imagery.
Microwave Remote Sensing
The principles and applications of active and passive microwave remote sensing with emphasis on spaceborne remote sensing of the Earth’s atmosphere, land and oceans. The laboratory section will provide hands-on experience on special processing techniques and the possibility of using these techniques for a student-defined term project in areas of geology, volcanology, glaciology, hydrology and environmental sciences
InSAR and its Applications
Introduction to the concepts of repeat-pass spaceborne SAR interferometry. Practical use of the technique to derive displacements of the solid Earth, glaciers and ice sheets to a precision of a few centimeters and accurate digital elevation models of the Earth’s surface.
As previously stated, these courses have not been finalized. An important aspect of the courses is that they contain content that will provide students with the skills and knowledge in geodetic concepts to help address the geodesy crisis in the United States.
I first mentioned the need for more trained geodesists in my July 2020 article for the “First Fix” column of GPS World, where I stated that the shortage of U.S.-trained geodesists poses a significant economic risk for the United States. In that column, I mentioned how geodetic science and technology now underpin many sciences, large areas of engineering such as driverless vehicles, UAVs, navigation, precision agriculture, smart cities and location-based services.
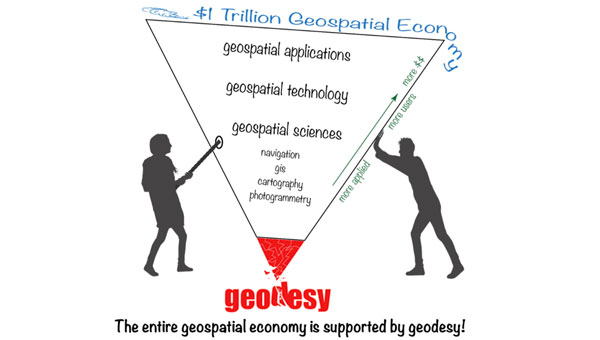
My November 2022 GPS World Newsletter highlighted “The inverted geospatial pyramid” graphic, which depicts how the entire $1 trillion geospatial economy is supported and dependent on geodesy. A lack of geodetic expertise in the United States presents a significant challenge, with future impacts on positioning, navigation, mapping and dependent geospatial technologies. These changes in the geomatic programs at the universities being funded by NGS’s geospatial modeling grants will provide students with the skills in geodetic concepts that will provide opportunities for employment in the public and private sectors involved with geospatial technology.
This newsletter and my past three GPS World newsletters highlighted the four NGS Geospatial Modeling grantees, which included creating geodesy curriculums that will help address the geodesy crisis. The MSU proposal describes a consortium-based enhanced graduate-level education program that will provide a range of course options and flexibility. I believe their proposed hybrid or asynchronous online program will provide more opportunities for individuals to study geodesy and advance the science of geodesy.
One final note about the NGS Geospatial Modeling Grants. On June 4, 2024, Brad Kearse, director of NGS, will moderate a session at the UESI Surveying and Geomatics 2024 Conference held in Corvallis, Oregon, on June 4 to 5, 2024. This will be a good opportunity for participants to obtain a better understanding of the geospatial modeling grants.
The NGS Geospatial Modeling grant program is focused on modernizing and improving the National Spatial Reference System (NSRS) and address emerging research problems in the field of geodesy. A secondary objective of this funding opportunity is to support a geodesy community of practice in collaboration with federal and nonfederal stakeholders to address the nationwide deficiency of geodesists and improve the coordination and use of geospatial data. This panel session will explore the research and other activities underway from recipients of the most recent round of the NGS Geospatial Modeling Grant Program.