Point One Navigation has introduced the Atlas inertial navigation system (INS) designed for autonomous vehicles, mapping and other applications.
Traditional INS solutions have typically relied on extensive post-processing to reach the high precision levels needed for accurate mapping and observability applications. In contrast, Atlas can provide users with ground-truth level accuracy in real-time, which can streamline engineering workflows, significantly reduce project costs and improve operational efficiency.
Atlas is designed to be used in large fleets. It integrates a highly accurate, low-cost GNSS receiver and IMU with the Polaris RTK corrections network and Sensor Fusion algorithms. The company aims to make it easier for businesses to equip their entire autonomous fleets with high-accuracy INS.
The system features a user-friendly interface, on-device data storage and both ethernet and Wi-Fi connectivity. Field engineers can easily configure and operate Atlas using smartphones, tablets and in-car displays.
Atlas aims to drive innovation across a variety of sectors, including autonomous vehicles, robotics, mapping and photogrammetry. Its real-time capabilities and affordability can enhance the widespread deployment of ground truth-level location in fleet operations.
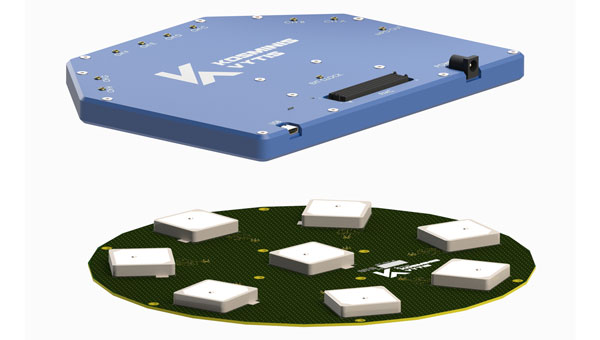
Kosminis Vytis has released two anti-jamming receivers, the KV-AJ3 and KV-AJ3-A, and an 8-channel, controlled reception pattern antenna (CRPA), anti-jamming development kit.
Image: Kosminis Vytis
The KV-AJ3 tri-band anti-jamming receiver combines a digital antenna control unit (DACU) and a GNSS receiver. KV-AJ3 can be used as a jamming protector for legacy receivers or as a stand-alone GNSS receiver solution.
When used with a Kosminis Vytis multi-band 4-channel antenna array, anti-jamming DACU uses the Null-Steering algorithm based on classic auto-compensator architecture and channel equalization, which eliminates the jamming signals from those processed by the receiver.
The tri-band solution decreases interferences from up to three directions in three frequency bands, including S-band, according to the company. This approach is designed to provide significantly higher protection against interference compared to single-frequency devices.
The receiver has a digital port for navigation data output. Jamming-free RF signals can also be delivered to external non-protected GNSS receivers to obtain position, velocity and time.
KV-AJ3 contains a MEMS inertial sensor, which allows for GNSS-aided INS solutions where coordinates and attitude angles are required.
Image: Kosminis Vytis
The KV-AJ3-A is designed to provide a stable navigation signal in three frequency bands, including S-band, even in the presence of jamming and other harsh conditions. The technology is MIL-STD compliant and meets the EMI/EMC requirements for avionics.
The direction to interfering signals is determined using a phased array antenna, which can then remove jamming signals from up to three directions. The original signal is either restored and delivered to external GNSS receivers or processed by the internal receiver to obtain position data. The device can be used as a DACU for legacy receivers, or as a stand-alone GNSS receiver solution.
According to Kosminis Vytis, the key components of this anti-jamming device are based on custom ASICs that allow users to achieve high jamming suppression and SWaP. KV-AJ3-A can be used for fixed installations and land, sea and air platforms, including UAVs.
Image: Kosminis Vytis
The 8-channel, CRPA, anti-jamming development kit is a set of instruments designed to help users add anti-jamming and anti-spoofing capabilities to their receivers.
The main development tool is NT1069x8_FMC — an 8-channel receiver board. The 8 coherent channels are based on NT1069, the RF application-specific integrated circuit (ASIC) that supports a high dynamic range of input signals.
Each channel performs amplification, down-conversion of GNSS signal to intermediate frequency (IF) and subsequent filtering and digitization by 14-bit ADC at 100 MSPS.
The board is compatible with GPS, GLONASS, Galileo, BeiDou, NavIC (IRNSS) and QZSS signals in L1, L2, L3, L5 and S bands. Each RF channel has an individual RF input with the option to feed power to an active antenna.
The board also has an embedded GNSS receiver and an up-converter, or modulator, which can provide connection to an external GNSS receiver.
Under a technology license, Kosminis Vytis provides users interested in developing their solutions based on the NT1069 chip with a reference design of anti-jamming receiver, anti-jamming algorithms and software tools for the development and evaluation of anti-jamming receivers.
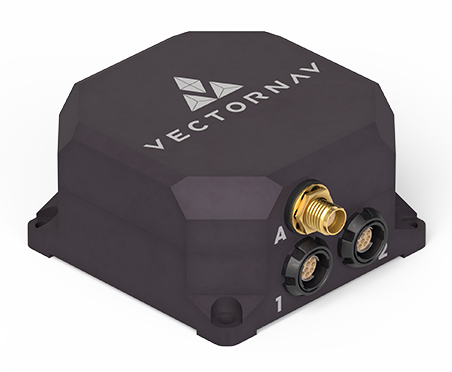
VectorNav Technologies has released two products, the VN-210-S and VN-310-S, which expand its tactical series of GNSS-aided inertial navigation systems (INS).
The VN-210-S GNSS/INS combines a tactical-grade inertial measurement unit (IMU) comprised of a 3-axis gyroscope, accelerometer, and magnetometer with a triple-frequency GNSS receiver. The integrated 448-channel GNSS receiver from Septentrio adds several capabilities, including L5 frequencies, moving baseline real-time kinematic with centimeter-level accuracy, support for Galileo OSNMA and robust interference mitigation.
These capabilities and high-quality hardware offer improved positioning performance in radio frequency-congested and GNSS-denied environments.
Image: VectorNav
The VN-310-S dual GNSS/INS leverages VectorNav’s tactical-grade IMU and integrates two 448-channel GNSS receivers to enable GNSS-compassing for accurate heading estimations in stationary and low-dynamic operations. The VN-310-S also gains support for OSNMA and robust interference mitigation, offering reliable position data across a variety of applications and environments.
The VN-210-S and VN-310-S are packaged in a precision milled, anodized aluminum enclosure designed to MIL standards and are IP68-rated. For ultra-low SWaP applications, VectorNav has introduced L5 capabilities to the VN-210E (embedded) when using an externally integrated L5-band GNSS receiver.
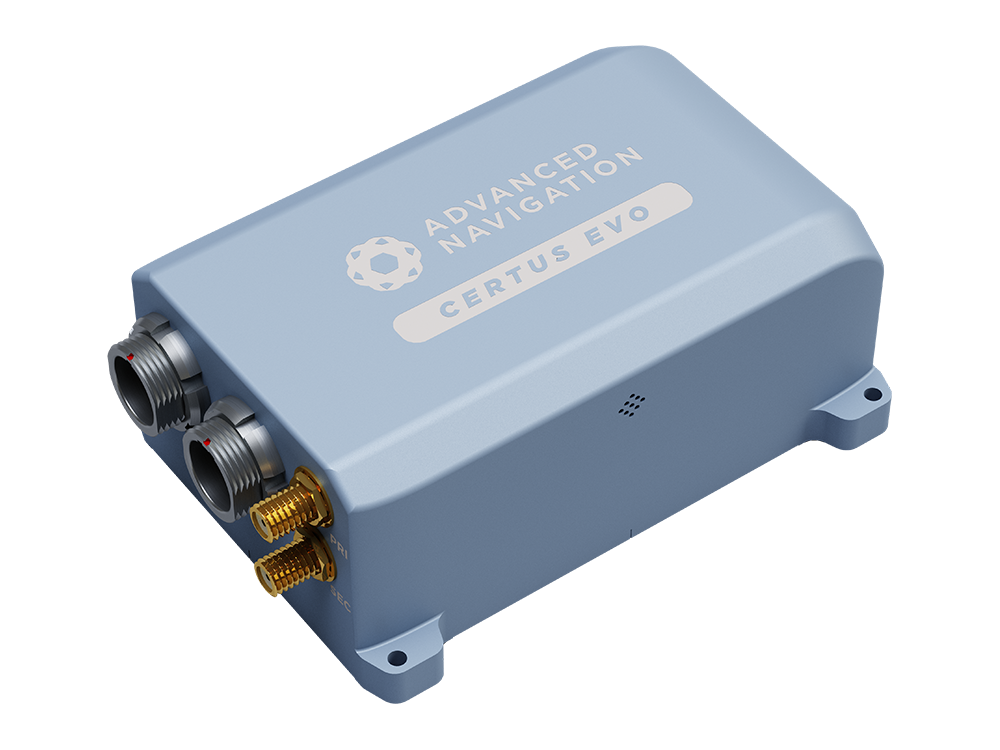
For demanding applications where precise navigation really matters and where size, weight and power are at a premium, Certus Evo exceeds the accuracy of many fibre optic gyroscopes while providing a very compact, lightweight and low power solution. This makes it ideal for applications such as aerial surveys where high performance is required and where flight times can be extended by minimising component weight and power consumption. The AI-based fusion algorithm takes full advantage of high-accuracy MEMS accelerometers and gyroscopes to deliver dependable performance at an affordable price point. Integration or customisation is made easy with extensive connectivity options and access to world-class technical support.
A roundup of recent products in the GNSS and inertial positioning industry from the November 2023 issue of GPS World magazine.
SURVEYING & MAPPING
MEMS IMU Suitable for rugged environments
The TAC-440 MEMS inertial measurement unit (IMU) is designed for demanding, mission-critical, rugged environments in a wide variety of defense, commercial, industrial, and marine applications. The TAC-440 features 1°/hr gyro bias and 1 mg accelerometer bias stability with 0.05°/√hr angle random walk over a wide temperature range. The solid-state quartz sensors and hermetically sealed IMU construction provide reliable MTBF and storage life, EMCORE stated. The TAC-440 supports four data message synchronization methods with either input synchronization pulse capability or an output time of validity capability. The user can choose whether the synchronization pulse is internally generated and output as a time of validity of the output data or whether the TAC-440 software will identify the synchronization pulse input and synchronize the output data to the input pulse. EMCORE Corporation, emcore.com
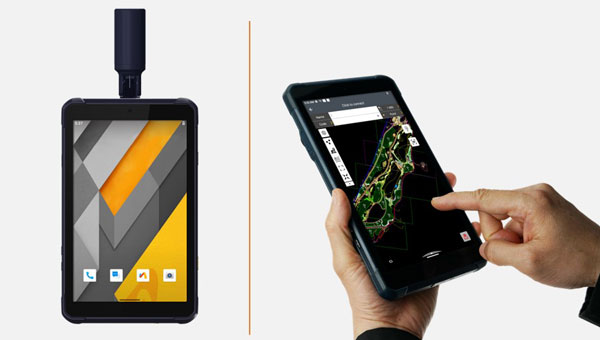
RTK GNSS Tablet A rugged device designed for geospatial and mapping operations in the field
The LT800H offers users robust outdoor performance, data security and centimeter-level accuracy for a variety of applications, including construction, environmental surveying and any industry in which Android tablets are used. Featuring a high-performance 1,408-channel GPS, GLONASS, Galileo and BeiDou module and a tracking GNSS helix antenna, the LT800H RTK Android tablet offers centimeter-to-decimeter positioning accuracy in challenging environments. It also comes equipped with a 4G modem to simplify connectivity to GNSS RTK network corrections. The technology also offers an eight-hour battery life, allowing users to collect data in the field uninterrupted. CHC Navigation, chcnav.com
PPK Software For land surveying, hydrography, airborne surveys, construction, and applications that require precise positioning
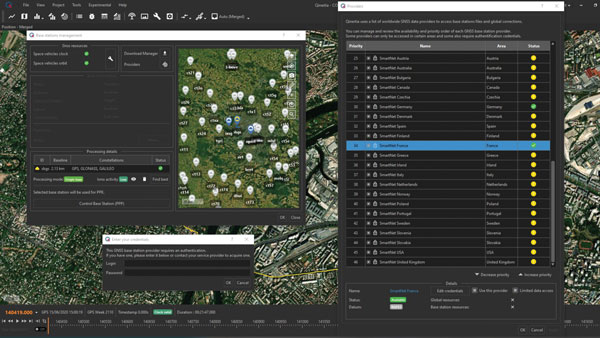
The Qinertia 4 contains an enhanced geodesy engine that has an extensive selection of preconfigured coordinate reference systems (CRS) and transformations, making it a suitable solution for applications that use diverse geodetic data. To tackle the challenges of variable ionospheric activity, Qinertia 4 features an Ionoshield post-processed kinematic (PPK) mode. This feature compensates for ionospheric conditions and baseline distances, enabling users to perform PPK even for long baselines and/or harsh ionospheric conditions. This ensures surveyors can achieve centimeter accuracy even in regions with unpredictable ionospheric disturbances. Another addition to the Qinertia 4 is an extended network support for continuously operating reference stations (CORS). This feature gives users access to a network of 5,000 SmartNet CORS for reliable GNSS data processing. These base stations add to the network of base stations directly available in Qinertia, bringing the total to more than 10,000 bases in 164 countries.
For data that cannot be processed using PPK, Qinertia 4 offers an alternative solution with its tightly coupled precise point positioning algorithm. This new processing mode, available for all users with active Qinertia maintenance, provides post-processing anywhere in the world without a base station, with a horizontal accuracy of 4 cm and a vertical accuracy of 8 cm. SBG Systems, sbg-systems.com
Airborne Lidar + RGB System Designed to enhance the details of aerial mapping operations
The AlphaAir 10 (AA10) features a high-precision navigation algorithm that provides 5 mm repeated range accuracy and achieves absolute precision in the 2 cm to 5 cm range, even in complex environments. The AA10 is capable of long-range measurements of up to 800 m, rapid scanning at 500,000 points per second, and features a continuously rotating mirror that enables scanning speeds of 250 scans per second. The AA10 enables the creation of mesh models by generating high-quality point clouds. It is powered by a 45 MP orthographic internal camera that provides high-resolution image mapping textures for 3D model reconstruction with realistic point cloud colorization. The AA10 also supports automated reality capture and real-time data visualization accessible directly from the UAV controller. The AA10 lidar system is lightweight and compact, weighing 1.55 kg, and provides a 30 min operating time when integrated with UAVs such as the DJI M350. The system is also IP64-rated. CHC Navigation, chcnav.com
GNSS Receiver Designed for survey projects
The Reach RS3 is a GNSS receiver that features inertial measurement unit (IMU) tilt compensation and a dual-band radio for enhanced compatibility with third-party receivers. The Reach RS3 enables users to survey at large tilt angles while maintaining survey-grade accuracy. The multi-band receiver works both as a base and a rover and comes factory calibrated. The receiver offers versatile options to get corrections from continuously operating reference stations (CORS), another Reach device, or a third-party base, so users can mix and match real-time-kinematic (RTK) receivers in a fleet. Its NTRIP connectivity enables corrections from CORS, NTRIP service, or a GNSS receiver using Emlid NTRIP Caster. When connected over NTRIP, Reach works on a baseline of more than 60 km in RTK and 100 km in post-processed kinematic. Emlid, emlid.com
GNSS Receiver Includes Trimble ProPoint and delivers survey precision and productivity in the field
The R580 GNSS receiver enables professionals in surveying, mapping and GIS, civil construction, and utilities to capture centimeter-level positioning. With the Trimble ProPoint GNSS engine embedded, users can measure points in challenging environments, such as under tree canopy or near buildings, while EVEREST Plus technology can identify and remove unwanted multipath signals for improved accuracy and data confidence. Using the Maxwell 7 chipset technology, the receiver provides fast processing, anti-spoofing capability and the ability to track all available GNSS constellations. The R580 supports Trimble RTX correction services for RTK-level precision without the use of a local base station or VRS network wherever correction sources are available. The receiver can be paired with all current mobile devices on a variety of operating systems and platforms —from a Trimble handheld or controller to a modern smartphone or tablet. It can also be mounted on a pole, vehicle or backpack. Trimble, trimble.com
OEM
GNSS Module Supports L1/L5 GNSS bands from multiple constellations, including NavIC
The NEO-F10N positioning module is based on the u-blox NEO form factor and is equipped with u-blox F10 dual-band GNSS technology. The NEO-F10N supports L1/L5 GNSS bands from multiple constellations — including NavIC — to provide meter-level position accuracy in urban areas. Its firmware is upgradeable and configurable to support several applications such as the vehicle telematics and micromobility markets or industrial applications requiring meter-level position accuracy. The NEO-F10N improves position accuracy in urban environments with its enhanced resilience against multipath interference. By leveraging signals from both the L1 and L5 bands, this module achieves better accuracy than using the L1 band alone. Users currently employing receivers based on modules such as the u-blox NEO-M8 and NEO-M9, can migrate to the new NEO-F10N generation. The module enhances accuracy, reduces power consumption, and offers an alternative solution to users who do not want to deploy dead reckoning set-ups. u-blox,u-blox.com
Multi-Band GNSS Antenna Designed to enhance meter-level positioning solutions
The ANN-MB5 is a multi-band (L1/L5/E5a/B2a) GNSS antenna that is optimized for the u-blox F10 platform and enables precise, reliable, and robust positioning, even in challenging environments. The antenna features concurrent reception of multiple navigation systems, including NavIC. The ANN-MB5 has a compact design with a magnetic base. u-blox, u-blox.com
INS A product for mobile mapping, autonomy, and more
The xRED3000 inertial navigation system (INS) offers quad-constellation GNSS support for multiple applications. The INS weighs 20 g, making it suitable for aerial payloads. At 53.6 mm x 50.6 mm x 9.5 mm in size, it can be incorporated without drastically changing a user’s design. When in a GNSS-denied area, the xRED3000 provides a position accuracy of 0.5 m even after 60 seconds. It features gx/ix tight-coupling algorithms, which improve accuracy in urban canyons and speed up real-time kinematic reacquisition after temporary GNSS outages. The xRED3000 features lidar inertial odometry, which takes data from lidar in post-processing to reduce inertial measurement unit drift and improve accuracy in areas with poor or no GNSS signal. Additionally, embedded NTRIP makes it easier to get GNSS corrections. OxTS, oxts.com
Triple Frequency GNSS Receiver Complete with a compact design for mobile applications
The BD990 supports triple frequency for the GPS, GLONASS, BeiDou and Galileo constellations. The receiver offers quick and reliable real-time kinematic (RTK) initializations for centimeter positioning. It features Trimble Maxwell 7 technology, which provides 336 tracking channels, Trimble Everest Plus multipath mitigation, and advanced RF spectrum monitoring and analysis. With the option of utilizing OmniSTAR or RTX services, the BD990 delivers varying levels of performance down to centimeter-level without the use of a base station. The BD992 also supports dual antenna GNSS heading while the BD992-INS supports position and orientation at high update rates. Trimble, oemgnss.trimble.com
MACHINE CONTROL
Automated Steering System Designed for precision agriculture applications
The SAgro150 automated steering system aims to provide farmers with an easy way to get started with auto-steering. With full-constellation tracking capability, the SAgro150 realizes ±2.5 cm auto-steering accuracy to maximize land use and yield while saving resources such as water and fertilizer. When compared to the first-generation SAgro100 system, the SAgro150 auto-steering system uses a single-antenna solution instead of a dual-antenna solution. It also features simpler integration options, only requiring a strong magnetic chuck to securely attach the antenna to the top of the tractor for satellite signal tracking. The new system also adopts dual gyroscope mode, enhancing the heading data reliability and compatibility with different tractors. The new system aids in applications such as rotary tillage, ridging, sowing and harvesting in straight line, curve, U-turn and more. SingularXYZ, singularxyz.com
Positioning and Heading Receiver Designed for multiple applications
AsteRx SB3 Pro+ is a housed multi-frequency GNSS receiver that uses triple-band GNSS technology for reliable centimeter-level real-time kinematic (RTK) positioning and sub-degree heading. With flexibility to be used as a rover or a base station, AsteRx SB3 Pro+ also has an ultra-high update rate and logging functionality. Enclosed in a ruggedized IP68 housing, the device is suitable for harsh environments. The AsteRx SB3 Pro+ has a high update rate and low latency for fast moving vehicles or machine parts. Septentrio, septentrio.com
GPS Antennas Offers enhanced navigation and tracking for automotive applications
The KP Performance vehicle GPS antennas come equipped with a gain of 28 dB to capture weak signals, even in the most challenging environments. The antennas also feature high out-of-band rejection. By minimizing signal interference and multipath effects, the antennas provide good signal quality and stability. The features of the antennas enable more precise navigation and enhanced user experiences for personal vehicles, commercial fleets, or autonomous systems. The antennas have a IPX6- or IP66-rated waterproof and dustproof design for reliable operation in harsh conditions. KP Performance, kpperformance.com
Septentrio has been working on port automation projects with Kalmar, a Finnish company that offers a wide range of cargo handling solutions and services to ports, terminals, distribution centers and heavy industry. I discussed this collaboration with Stef van der Loo, market access manager at Septentrio. Following are excerpts of our conversation. For a much longer version, click here.
What are the challenges operating in a port?
In a container terminal or port, everything is interconnected and, therefore, complex. Lately, GNSS has become more popular, especially when coupled with inertial navigation, because the technology has become more capable of delivering centimeter-level accuracy even in challenging environments where the line-of-sight to GNSS satellites may be partially blocked by containers or structures.
What drives higher accuracy?
this Kalmar container handler has a Septentrio high-accuracy GNSS/INS receiver and an inertial system, which operate in challenging environments of low satellite visibility. (Image: Kalmar)
Every year, every terminal stacks a certain number of containers, but not all the information about them is given to the terminal operating system (TOS) automatically. Sometimes, operators must search for misplaced containers, which may require stopping operations and deploying additional personnel. Additionally, it is not very safe to go into these yards. This is one reason why ports began to deploy positioning systems. However, ten years ago, with meter accuracy, they were failing all the time. Now, improvements in the technology have enabled GNSS to become fit for the challenge. In terminals, you can use GNSS or INS systems for vehicle traffic management, autonomous vehicles and tasks, or to get the position of a container.
For example, when a reach stacker reaches into a stack and locks a container in place, it’s crucial to have a very reliable centimeter-level position. Errors grow as the data is processed from the control systems to the TOS. To know for certain the position of a container when it was placed in a stack errors must not exceed half a meter. Therefore, the reliability and accuracy of the GNSS/INS is crucial for container positioning.
Do you buy the IMUs and do all the integration?
We buy the IMUs mostly from Analog Devices. The integrated inertial navigation solution is our own. We focus on inertial navigation in several markets — including logistics, autonomous mining, and agricultural robotics.
What is the division of labor between you and Kalmar?
Kalmar is both an OEM and an integrator. They are a guru for the automation of logistics terminals. We work with them mainly as an integrator. They will go to a terminal, like other integrators, and install the systems and other equipment. Kalmar built a whole sensor stack with all types of sensors and integrated this in their packages, such as SmartPort. With a train-the-trainer principle, our engineers trained Kalmar employees, so they have first line control of the installations and troubleshooting. Then we are ready to support them where we can. We have a continuous feedback loop with several logistics customers for suggestions and product recommendations for the evolution of our products and services for this segment.
Straddling containers
JAVAD GNSS
Straddle carrier in operation equipped with DELTA-3S. (Image: Canva)
One of the largest container companies in the world needed a solution to manage its straddle carriers, which are specialized container handling vehicles at ports that can pick up large containers and move them to trucks, trains, or other container stacks. This is very challenging for container terminal operators because ports are highly complex operating environments that also provide other maritime services, such as storing and managing cargo, forwarding freight, and clearing customs. To handle containers safely and efficiently, modern terminals have buildings, equipment, and cranes in addition to straddle carriers. All this infrastructure creates a lot of multipath that stresses the capabilities of GNSS receivers.
To develop and install this new system for straddle carrier vehicles, the container company turned to JAVAD GNSS and to ALLSAT GmbH, a German engineering, geodetic and electronic company founded in 1991 that has been JAVAD’s German distribution partner since 1995. To address the challenge, in 2022, ALLSAT GmbH applied a new digital twin concept to supply and support the commissioning of several hundred JAVAD GNSS rover solutions at three international seaports. This required obtaining real-time and highly accurate positional data for moving straddle carriers and uploading it to a terminal information system for control and documentation.
ALLSAT deployed a geodetic conceptual design that integrates JAVAD GNSS Delta-3S receivers and RingAnt G5T and GrAnt-G5T antennas to deliver precise surveying of two GNSS reference stations per port, then commissioned the system on all the straddle carrier vehicles from a single source. It also developed a solution employing two redundantly operating reference stations that broadcast RTK correction data for all GNSS (GPS, Galileo, GLONASS, and BeiDou) on different IP addresses/radio frequencies. All the JAVAD RTK rovers can receive and process data from both correction sources in parallel thanks to their 874 channels and parallel processors. This offers two advantages. First, it provides a comprehensive fallback in the unlikely event that one reference station fails. Second, it greatly improves the reliability, speed and accuracy of the rovers, which operate in an environment rife with signal shadowing and multipath influences.
Working closely with its client and JAVAD GNSS, ALLSAT was able to implement this project, from initial idea to verification and commissioning, in only a few weeks. The combination of redundant, multi-constellation reference stations and JAVAD GNSS multi-base RTK yielded a solution that is highly reliable and available, providing for continuous operation despite the challenging environmental conditions. Additionally, JAVAD GNSS provides firmware updates for the life of the devices, which will enable the customer to rely on this base rover solution for the next 10 years.
Tracking trains
M3 Systems
(Image: Logiplus)
M3 Systems, a French-Belgian geolocation company founded in 1999, has long supported the R&D activities of European space and civil aviation agencies. It also markets products that it developed through its R&D activities. In recent years, M3 Systems expanded its activities into the automotive and rail sectors. To develop a new device for trains, it partnered with two Belgian companies: Logiplus, which makes onboard electronic systems for trains, and ALSTOM Belgium, a division of ALSTOM group, which builds trains and equipment for train tracks. “The objective during the product design was the development of a hybrid sensor that uses both a GNSS sensor to provide absolute positioning, and an inertial measurement unit (IMU) to compensate for environmental obstructions such as trees and urban canyons by calculating the train’s position based on its last GNSS-based absolute position,” explained Jérémy Skelton, project lead at M3 Systems.
IMUs have long been coupled with GNSS because each technology compensates for the other one’s limitations: IMUs suffer from drift and GNSS receivers from signal loss in certain environments. In theory, surveying the tracks and using odometry to monitor a train’s linear position on them would suffice to locate it. In practice, however, wheel encoders “are prone to errors because the wheels are subjected to a lot of sliding and skidding,” Skelton said.“So, we need completely independent sensors.”
This requirement led ALSTOM to propose the development of the IGLOO (an acronym for IMU & GNSS vehicle odometry) input device, which integrates all the different sensors. Logiplus designed and manufactured the hardware, while M3 Systems wrote the algorithm.
The project, which was partially funded thanks to a grant from the European Regional Development Fund and supported by the Région Wallonne of Belgium, was divided into three components:
The software to couple the IMU and the GNSS to compute the train’s velocity.
The auto-calibration solution, which eliminates the need for automatic calibration when starting the sensor.
A hardware platform that incorporates a low cost IMU.
The consortium defines three kinds of zones in which a train will operate, depending on the trustworthiness in each zone of the GNSS signals. “For example, an environment with a clear view of the sky and no nearby obstacles is trustworthy,” Skelton said, “while a forest, an urban canyon, or the entry into a tunnel are not. Without GNSS support, eventually the IMU will also become unreliable.”
At very low speeds, errors must be very low, but at higher speeds a greater speed error is allowed. Operators can extract different levels of data from a GNSS receiver. To achieve a tight GNSS-INS coupling, they can use the Doppler delays and hybridize them with the IMU or use the tracking loop and set the range and Doppler. For a loose coupling, they can directly use the GNSS receiver’s positioning, velocity, and timing data. All couplings are performed by using Bayesian filters, for example the Kalman filter. “Loose coupling will give you less accuracy, reliability, and integrity, but it will also be less CPU-intensive,” Skelton said.
For data acquisition on a train, M3 Systems generated a printed circuit board (PCB) with a u-blox GNSS receiver, a Septentrio Asterix GNSS receiver, nine IMUs (which enables them to choose the best one for the use case), a reference trajectory unit that provides ground truth, and a computer that takes the data from the GNSS receivers and the IMUs. “Everything was integrated for measurement purposes on a rack on a train that runs here in Belgium,” Skelton said, “and all the data was retrieved automatically via a 4G internet connection. We have collected a few thousand kilometers traveled, a few hours of tunnels, and both trustworthy and untrustworthy GNSS signals.”
M3 Systems’ partner Logiplus designed the product to support the hybridization software and interface with the European vital computer (EVC), which monitors and continuously calculates the train’s maximum speed and braking curve. “It is critical for the EVC to have perfect knowledge of the train’s speed, which is the main reason we designed this new device,” Skelton said. “What is specific in that hardware is the computing power, the two systems (GNSS and inertial), and the data fusion algorithm, which allows the hardware to evolve. For example, we can switch to a different IMU.”
The IGLOO system complies with the specified safety requirements, contributing to a more reliable knowledge of the train speed, which reduces the risk of accidents and fatalities, improves traffic flow, and improves the efficiency and safety of the train operations, Skelton pointed out.
Surveying a railroad
Eos Positioning Systems
A rail tunnel at Leigh-on-Sea in East of England. Arcadis used Eos Arrow 100 GNSS receivers alongside Esri’s ArcGIS Survey123 to collect rail assets with submeter accuracy in real time. (Image: Amaro)
Network Rail, which owns and manages the railway infrastructure in England, Scotland and Wales, needed an as-is survey of up to 50,000 electrical assets along 400 miles of rails in the eastern region of the country. It turned to Arcadis, a design and consultancy firm that specializes in sustainable design and engineering services. The project required delivering accurate building information modeling (BIM) plans of the rail line to support operations and maintenance of the electrified infrastructure, while ensuring a safe working environment for the surveying teams. Using Arrow 100 GNSS receivers from Canadian manufacturer Eos Positioning Systems and Esri’s ArcGIS Survey123 and ArcGIS Hub software, Arcadis was able to efficiently capture the data with sub-meter accuracy and share it with Network Rail in real-time.
Arcadis decided to conduct a digital field survey to collect the data and to use GIS to manage it, said Gideon Simons, Associate Director of GIS and Geospatial Consultant at Arcadis. “We provided the survey teams iPads, the Esri application, and the GNSS receivers.” For corrections, it used the Ordnance Survey’s OS Net. “We found through a few assessments and testing that the Eos Arrow’s precision was good enough to meet the project’s requirements.”
The region surveyed is mostly rural but the rail line traverses some very urbanized areas. “One of the first challenges was surveying under cover in stations and in quite a few tunnels. So, we developed methodologies using georeferenced plans and imagery and taking temporary datums using GNSS outside the tunnels, to measure distance and offsets to the assets in the tunnels with measuring wheels that allowed for post-survey processing and the location accuracy required,” said Simons.
Photography was also a key to the success of the project. “In just one depot, we surveyed thousands of assets with many inside train sheds,” said Simons. “We use 360-degree cameras and train view cameras, so that we really understand where assets should be placed.”
The next stage for Network Rail is to maintain that equipment — whether it’s replacing it, bringing it up to code, or potentially installing new assets, Simons pointed out. “In the UK, we use a variety of measurements — imperial and metric. So, it’s been very helpful for the client to have just one source of truth reference that supports their work yet that can still link with other systems and ease communication with wider teams.”
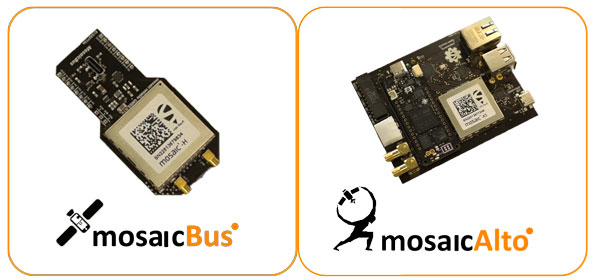
Septentrio has introduced two new open-source hardware projects available to integrators of satellite-based positioning.
By expanding their ecosystem of open-source hardware and software, Septentrio aims to make reliable GNSS positioning more accessible to integrators and developers.
The first project, mosaicBus, is a reference design of a board compatible with mikroBUS add-on board standards primarily used in embedded systems. MikroBUS enables easy plug-and-play sensor integration into development boards from major companies such as MikroElektronika, who developed the mikroBUS standard.
The second project, called mosaicAlto, is a carrier board embedding the mosaic-X5 or mosaic-H GNSS receivers, which transforms Arduino Pro Portenta into a single-board computer with a GPS/GNSS receiver.
The mosaicBus board can be used in applications such as automation, robotics or Internet of Things (IoT).
Mosaic is a compact high-precision multi-frequency GPS/GNSS receiver module known for its performance in harsh environments and resilience to jamming and spoofing. The module is designed for systems where accuracy and reliability are required. It has been widely adopted through existing projects such as the mosaicHAT, a shield board for Raspberry Pi and Mowi, a wireless communication board using the mosaic receiver.
In addition to hardware reference designs, Septentrio also supports ROS and several other UAV autopilots.
Septentrio has partnered with SparkFun Electronics to broaden market reach and the availability of satellite-based positioning products for integrators in a variety of industrial and emerging sectors. As part of the partnership, SparkFun has released its first product, the mosaic-X5 Triband GNSS RTK Breakout board.
The mosaic module is a compact GNSS receiver that delivers high-accuracy tri-band positioning with built-in technology that is resilient to signal interference, including jamming and spoofing. The SparkFun breakout board enables users to log data as well as control and monitor the receiver via the web interface, without the need for additional code.
The mosaic-X5 Triband GNSS RTK Breakout is now available for purchase via the SparkFun website.
Adtran’s OSA 5400 TimeCard has obtained approval from the Open Compute Project (OCP) Time Appliance Project (TAP) for data center timing and synchronization. The plug-in device integrates Adtran’s Oscilloquartz timing technology into any white box server, aiming to solve key challenges in the transition to virtualized environments.
The OSA 5400 TimeCard facilitates smooth and efficient operations for critical and time-sensitive applications. The card’s compact design, scalability and advanced features make it ideal for data center operators looking to adopt open, disaggregated hardware, the company said.
In combination with Adtran’s Ensemble Sync Director, the timecard offers operational teams a comprehensive, unified view of their entire timing infrastructure. Additionally, the OSA 5400 TimeCard has been developed to fully align with the IEEE P3335 standardization. The inclusion of high-performance quartz and rubidium oscillators ensures accurate timing during extended GNSS disturbances.
The OSA 5400 TimeCard can be integrated into available PCIe slots of standard servers or PCs.
OxTS has released the xRED3000, its lightest and smallest inertial navigation system (INS) suitable for land- and air-based applications.
Combining two survey-grade GNSS receivers and OxTS’ latest IMU10 inertial technology, the xRED3000 is designed to be the GNSS/INS component for products requiring accurate localization, even in harsh environments.
The xRED3000 uses OxTS lidar inertial odometry (LIO), which takes data from a lidar in post-processing to reduce IMU drift and improve accuracy in areas with poor or no GNSS signal such as urban canyons. The technology also provides a position accuracy of 0.5 m, even after 60 seconds of no GNSS signal.
The INS is compatible with OxTS Georeferencer, a post-processing and calibration software that aims to improve the accuracy and clarity of user’s pointcloud data. It warms up to specification in three minutes, even with low-dynamic movement, increasing flight time for aerial applications and reducing the space needed for land-based warmups.
Emlid has launched a GNSS receiver, the Reach RS3. It features inertial measurement unit (IMU) tilt compensation and a dual-band radio for enhanced compatibility with third-party receivers.
The Reach RS3 enables users to survey at large tilt angles while maintaining survey-grade accuracy. The multi-band receiver works both as a base and a rover and comes factory calibrated.
The receiver offers versatile options to get corrections from continuously operating reference stations (CORS), another Reach device, or a third-party base, so users can mix and match real-time-kinematic (RTK) receivers in a fleet.
Its NTRIP connectivity enables corrections from CORS, NTRIP service, or a GNSS receiver using Emlid NTRIP Caster. When connected over NTRIP, Reach works on a baseline of more than 60 km in RTK and 100 km in post-processed kinematic. Emlid has launched a GNSS receiver, the Reach RS3. It features inertial measurement unit (IMU) tilt compensation and a dual-band radio for enhanced compatibility with third-party receivers.
The Reach RS3 enables users to survey at large tilt angles while maintaining survey-grade accuracy. The multi-band receiver works both as a base and a rover and comes factory calibrated.
The receiver offers versatile options to get corrections from continuously operating reference stations (CORS), another Reach device, or a third-party base, so users can mix and match real-time-kinematic (RTK) receivers in a fleet.
Its NTRIP connectivity enables corrections from CORS, NTRIP service, or a GNSS receiver using Emlid NTRIP Caster. When connected over NTRIP, Reach works on a baseline of more than 60 km in RTK and 100 km in post-processed kinematic.
EMCORE Corporation has released the TAC-440 MEMS inertial measurement unit (IMU). The TAC-440 IMU is designed for demanding, mission-critical, rugged environments in a wide variety of defense, commercial, industrial and marine applications.
The TAC-440 features 1°/hr gyro bias and 1 mg accelerometer bias stability with very low 0.05°/√hr angle random walk over a wide temperature range. The solid-state quartz sensors and hermetically sealed IMU construction provide reliable MTBF and storage life, EMCORE states.
The TAC-440 supports four data message synchronization methods with either input synchronization pulse capability or an output time of validity capability. The user can choose whether the synchronization pulse is internally generated and output as a time of validity of the output data or whether the TAC-440 software will identify the synchronization pulse input and synchronize the output data to the input pulse.