GPS World staff is attending AUVSI XPONENTIAL 2023.
AUVSI XPONENTIAL, co-hosted by Messe Dusseldorf North America, will be held in Denver, Colorado, May 8-11. This year’s theme is “Building the Blueprint for Autonomy.” XPONENTIAL is also celebrating its 50-year anniversary.
The event invites industry changemakers and end users to experience new technology that is solving real world problems such as safety and defense, energy and infrastructure, business, construction, health, and the environment. The convention features keynote speakers, panel presentations, educational programs, specialized workshops, networking opportunities, and an extensive exhibitor hall teaming with newly developed technology to preview, as well as co-located events.
XPONENTIAL attracts more than 7,500 attendees each year, who attend more than 200 educational sessions as part of the full conference.
For more information about XPONENTIAL visit xponential.org. To follow our live coverage, click here.
On April 26, the European Union Court of Justice dismissed a complaint from OHB System regarding a contract awarded to Thales and Airbus to supply satellites for the Galileo program, reported Reuters. OHB System supplied most of Galileo’s operating satellites.
In 2021, the European Commission rejected OHB System’s bid to supply the next-generation Galileo satellites and selected Airbus Defense and Space and Thales Alenia Space Italia. This follows a 2018 tender by the European Space Agency for next-generation Galileo satellites.
OHB System requested the European Commission and the ESA suspend the tender after its former chief operating officer was hired by Airbus and to exclude Airbus from the tender. This was rejected in January 2021.
The Navigation Technology Satellite–3 (NTS-3) — designed, built and tested by L3Harris — is on track to launch this year. The experimental satellite aims to shape the future of U.S. positioning, navigation and timing capabilities and to help U.S. forces to operate in GPS-denied environments and areas prone to spoofing.
NTS-3 minimizes the impacts of GPS jamming through rapidly reprogrammable signal waveforms, frequency agility and increased signal strength. Its embedded software and firmware are reprogrammable on-orbit.
When paired with reprogrammable receivers, the U.S. Air Force and U.S. Space Force can react in real time as threats evolve on the battlefield. In addition, NTS-3 has enhanced processors to support more complex signals.
In January, L3Harris delivered the NTS-3 vehicle to Kirtland Air Force Base, New Mexico, to prepare the satellite for launch. The Air Force Research Laboratory and L3Harris are working together to complete space vehicle testing, launch vehicle integration and enterprise integration to confirm compatibility between the control segment, ground receivers and the satellite vehicle.
NTS-3 is scheduled to launch later this year aboard United Launch Alliance’s Vulcan Centaur rocket. Once launched, NTS-3 will remain in a near-geosynchronous orbit for an inaugural year of testing.
Syntony GNSS and Xona Space Systems have partnered to integrate the low-Earth-orbit (LEO) position, navigation and timing (PNT) constellation from Xona into GNSS simulators and receiver solutions from Syntony.
This partnership is part of Syntony’s and Xona’s strategy to offer users PNT solutions.
“The demand for advanced and resilient PNT services is skyrocketing,” Brian Manning, CEO of Xona Space Systems, said. “We are building an entire ecosystem from the ground up to address this demand. Having a full Rx-Tx solution available for all Xona signals is one of the keys to rapidly develop this LEO PNT ecosystem.”
Syntony GNSS was the first PNT services provider to integrate all of the Xona demo signals into its multi-GNSS simulation solution, Constellator, in 2022. However, to offer a full testing solution, Syntony has also developed a Xona-enabled GNSS receiver.
The latest versions of Ekinox, Apogee, and Navsight from SBG Systems are now fully compatible with the Fugro Marinestar G4+ precise point positioning (PPP) solution.
Fugro Marinestar G4+ is a solution that uses satellite-based augmentation to deliver centimetric positioning accuracy without depending on a local base station. This product is suitable for maritime operations where precise positioning is important.
With this compatibility, users can now use Marinestar correction with SBG products both via L-Band or NTRIP distribution.
The combination of high-performance correction with inertial measurements from SBG Systems enables users to achieve accuracy in attitude and position for maritime applications. This is suitable for applications such as marine construction, dredging, hydrography and more.
On April 13, the National Geodetic Survey (NGS) held a webinar that described the classifications, accuracy standards and general specifications for GNSS geodetic control surveys using OPUS Projects. The webinar provided a summary of NOAA Technical Memorandum NOS NGS 92, which will be published after it has been through a final review. The presentation can be downloaded here and here. I will highlight some important sections of the webinar, but would also encourage readers to download it and watch it in its entirety.
NGS April 2023 Webinar (Credit: NGS Website)
As described in my March column, OPUS Project 5.1 routine now allows the use of RTN vectors and post-processed vectors from vender software. See my March column or NGS’ January 2023 webinar to learn more about OPUS Project 5.1.
The April webinar described the specifications that are required for GNSS surveys that will be submitted to NGS for publication. It was noted that these specifications are limited to the use of OPUS Project (version 5) for the establishment of North American Datum of 1983 (1983) coordinates and orthometric heights of vertical datums that are part of the current National Spatial Reference System (NSRS). The intent of the NOAA Technical Memorandum NOS NGS 92 is to replace NOAA Technical Memorandum NOS NGS 58 — “Guidelines for Establishing GPS-Derived Ellipsoid Heights, (Standards: 2 cm and 5 cm), Version 4.3” of November 1997, and NOAA Technical Memorandum NOS NGS 59 — “Guidelines for Establishing GPS-Derived Orthometric Heights” of March 2008.
Why replace the guidelines now?
First, there have been improvements in GNSS processing and technology since NOS NGS 58 was published in 1997. The guidelines did not consider the use of real-time kinematic (RTK) technology, the number of NOAA CORS has significantly increased since the 1990s, and NGS’ web-based software OPUS Project 5.1 now allows the use of RTN vectors and post-processed vectors from vender software. In my opinion, there is a difference between guidelines and specifications. Guidelines provide recommended procedures to meet a specific outcome or standard while specifications are an explicit set of requirements that need to be satisfied to meet a specific outcome or standard. In other words, guidelines are general recommendations, and by nature, should be open to interpretation and revised to meet new technological developments.
The webinar described the standards and specifications in 10 tables, which are displayed below. I will highlight a few of these tables that address how RTN vectors and post-processed vectors from vender software can be included in OPUS Project 5.1.
List of Tables:
Classifications of Network and Local Accuracy
Description of Mark Types and Anticipated Usage
Observation Method Requirements for Mark Types
Standards for Observation Requirements by Method
Standards for Network Design
Standards for Monumentation
Standards for Session Processing and Adjustment Results
Standards for Achieving Valid Orthometric Heights
Standards for Equipment Used in Field Observations and Office Procedures
Standards for Required Documentation
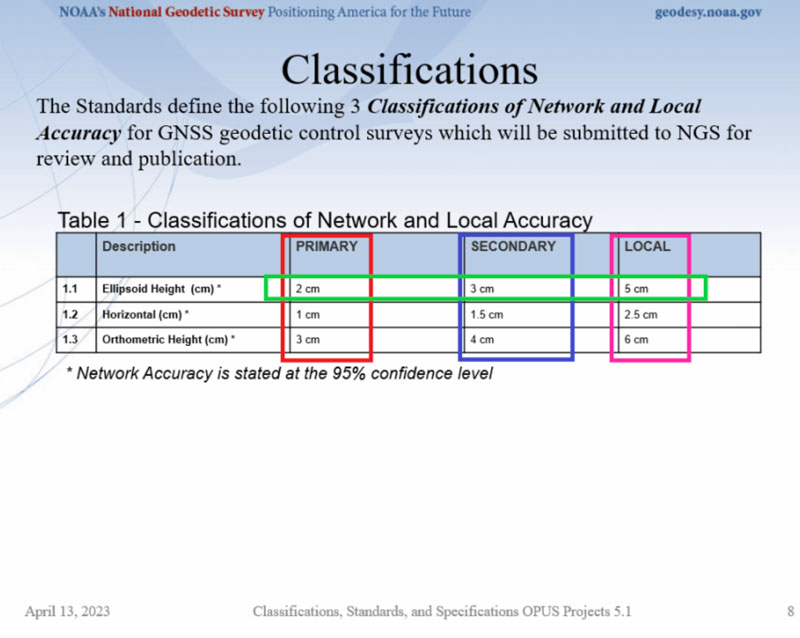
First, NGS has defined three classifications for network and local accuracies in Table 1 — primary, secondary and local. As expected, the accuracy values are different based on the classification. See Table 1. Table 4 provides the observation specifications for each classification.
Table 1. (Credit: NGS Website)
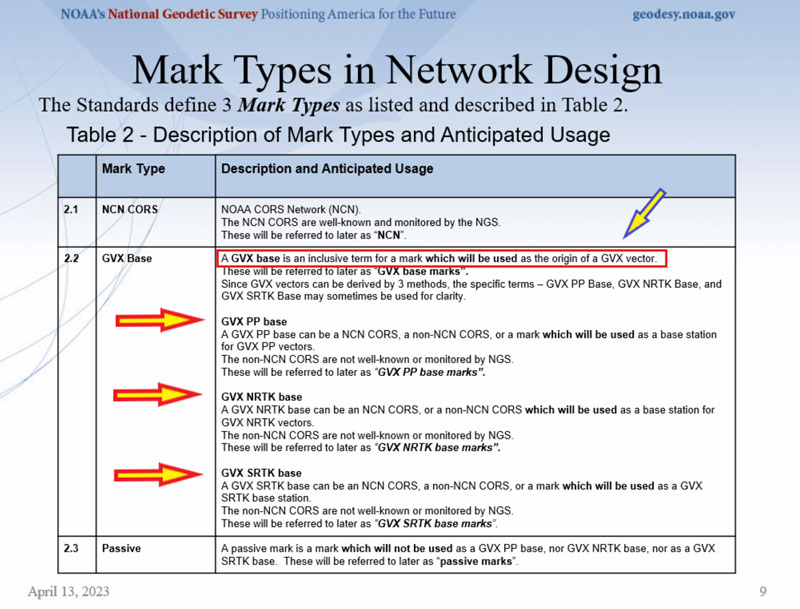
Table 2 provides definitions that are important to understand. NGS designates three different types of marks in the network design — NCN CORS, GVX base, and passive. See Table 2. Each of these types of marks has its own observation requirements which is described in Table 4.
Table 2. (Credit: NGS Website)
Information about the GVX vector format can be obtained here. Basically, the GNSS Vector Exchange provides a standard file format for exchanging GNSS vectors derived from varying GNSS survey methods and manufacturer hardware. NGS’s goal for developing GVX is to make it possible to upload vector data to OPUS-Projects. There are different observation specifications for OPUS Project processing GNSS data and for OPUS Projects accepting GNSS data observed and processed by manufacturer hardware and software — that is GVX data.
Please see my October 2021 column for more information on NGS’s GVX format.
A note on abbreviations: PP stands for post-processed; that is, OPUS PP are baselines processed in OPUS Project. GVX PP are baselines processed using a vendor’s software. GVX NRTK and SRTK are baselines from a vendor’s RTK systems.
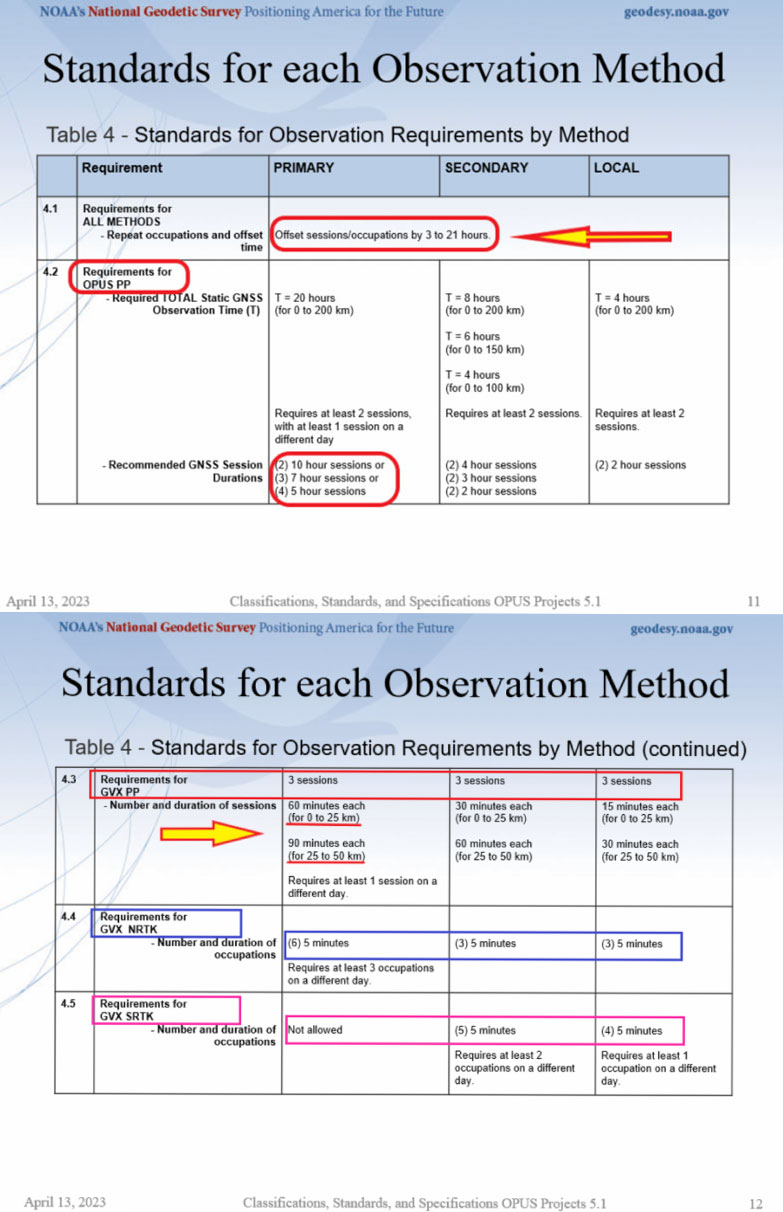
Table 4 provides the observation requirements for primary, secondary, and local marks. I have highlighted the following items in that table:
All methods must repeat occupations and repeat sessions/occupations must be offset by 3 to 21 hours.
Required total static GNSS observation time for OPUS PP is greater than total static GNSS observation time for GVX PP data. That said, OPUS PP requires at least two sessions while GVX PP requires at least three sessions.
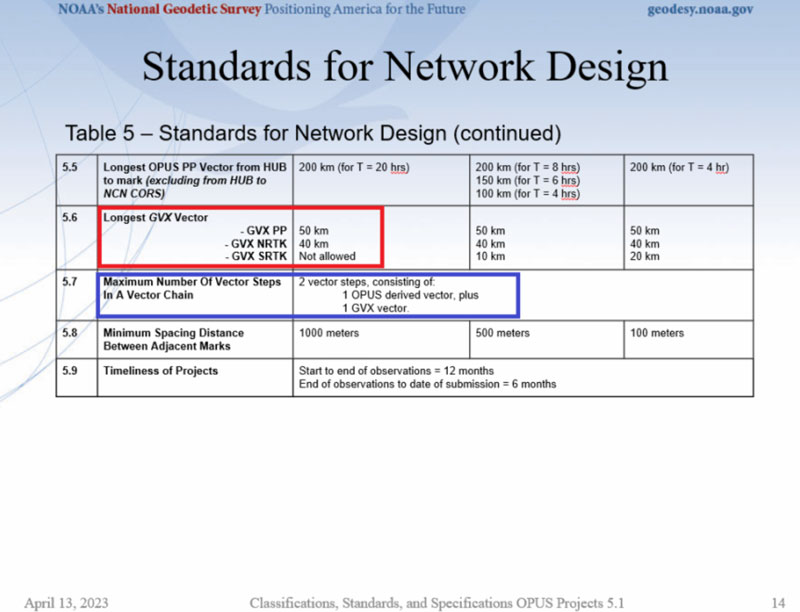
For GVX PP session, the duration of each session increases with distance and a GVX PP baseline cannot exceed 50 km (this is provided in Table 5:“Standards for Network Design”).
For GVX NRTK, the number of sessions increases to sixfor primary marks, the duration of occupations decreases to 5 minutes, a GVX NRTK baseline cannot exceed 40 km (this is provided in Table 5 – Standards for Network Design), and the mark requires at least three occupations on different days.
The use of GVX SRTK is not permitted for primary marks.
Table 4. (Credit: NGS Website)
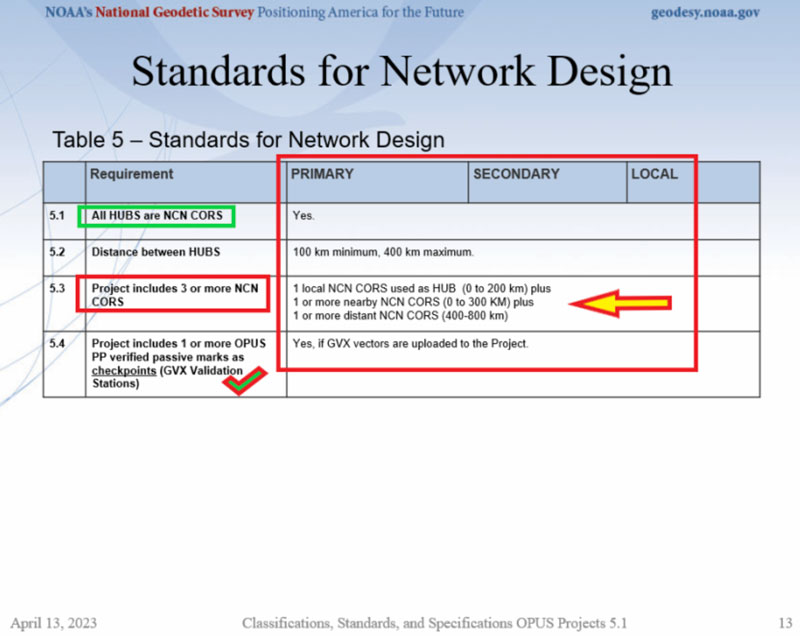
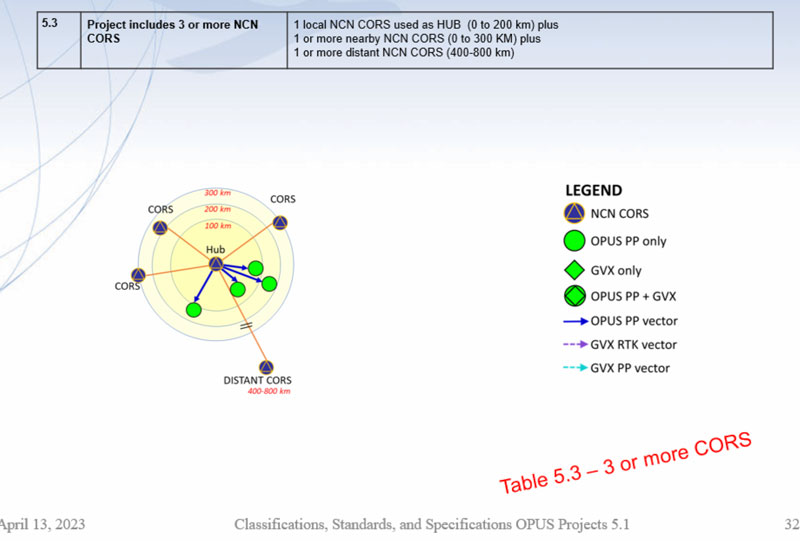
Table 5 provides the specifications for network design; that is, the number of NOAA CORS required and the allowable distance from the HUB CORS. The image titled “Project includes 3 or more NCN CORS” provides a depiction of the specifications.
Table 5. (Credit: NGS Website)
Not all CORS are created equal, so users should evaluate the CORS they plan to include in their GNSS project. My December 2021 column discusses using NGS Map service to evaluate CORS data and plots. Some of the criteria that are used to evaluate CORS include the following: designated as “operational,” computed (measured) velocities rather than modeled (predicted) velocities, “consistent” data depicted in short-term time-series plots, network accuracies ~1 cm to 1.5 cm horizontally and less than ~2 cm to 3 cm in ellipsoid height.
Project includes 3 or more NCN CORS. (Credit: NGS Website)
Specifications for GVX vectors are also provided in Table 5. As indicated in Table 5 and previously stated, GVX PP baselines are limited to 50 km and GVX NRTK vectors are limited to 40 km.
Table 5 continued. (Credit: NGS Website)
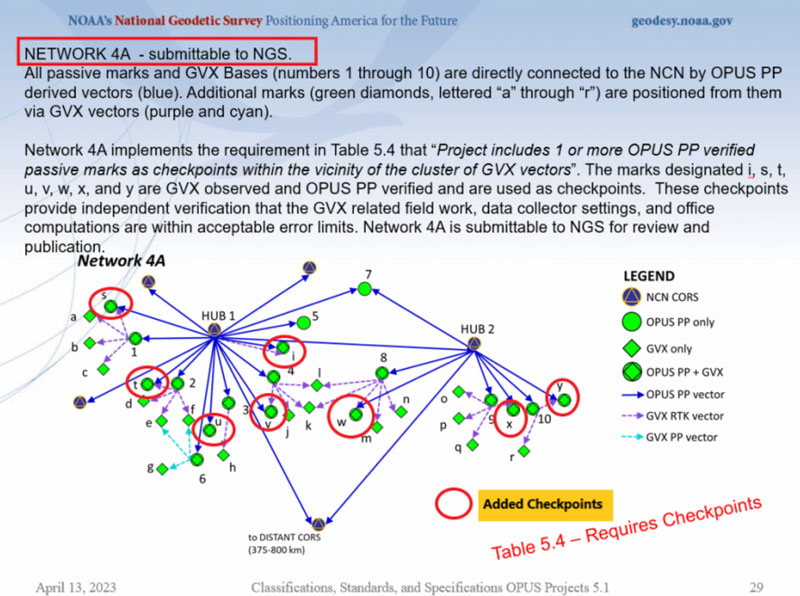
An important specification that needs to be highlighted is that the maximum number of vector steps in a vector chain is two. This means there can only be one OPUS PP plus one GVX vector (either GVX PP or GVX RTK) in a vector chain. This is demonstrated in an example in theimage below.Also, specification 5.4 states that if GVX vectors are uploaded to the project, then a project needs one or more OPUS PP verified passive marks as checkpoints (these are denoted as GVX Validation Stations). The checkpoint marks have been highlighted in the image below as well.
NETWORK 4A – Submittable to NGS. (Credit: NGS Website)
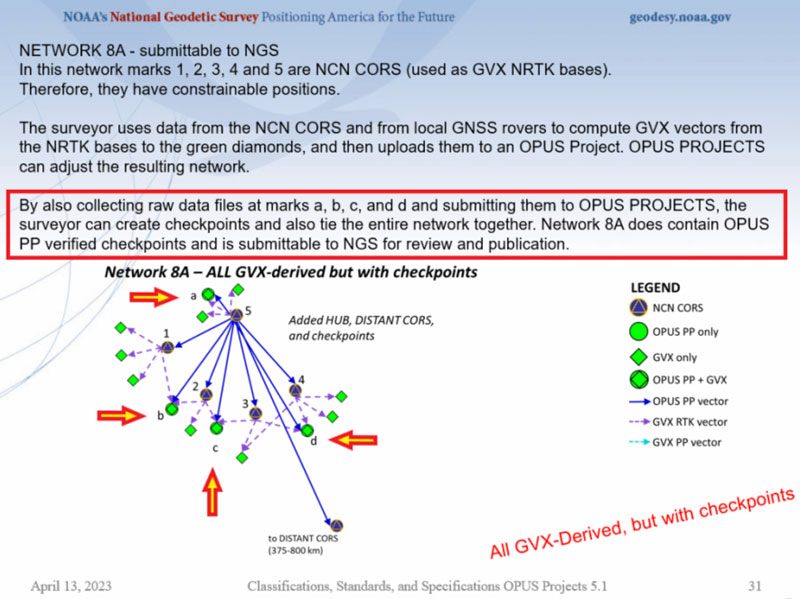
If your state has many CORS with an NRTK, as North Carolina does, then the image below provides an example of how OPUS projects and GVX vectors can be used to efficiently and effectively establish primary control marks.
NETWORK 8A – submittable to NGS (Credit: NGS Website)
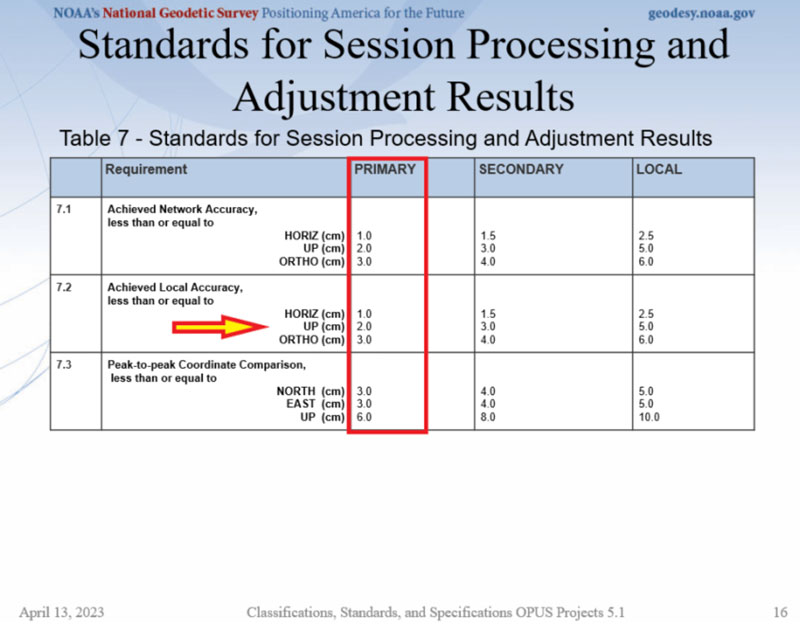
Table 7 provides session processing and adjustment results. The achieved network standard highlighted in the image is the same as the classification standard provided in Table 1, which is what should be expected.
Table 7. (Credit: NGS Website)
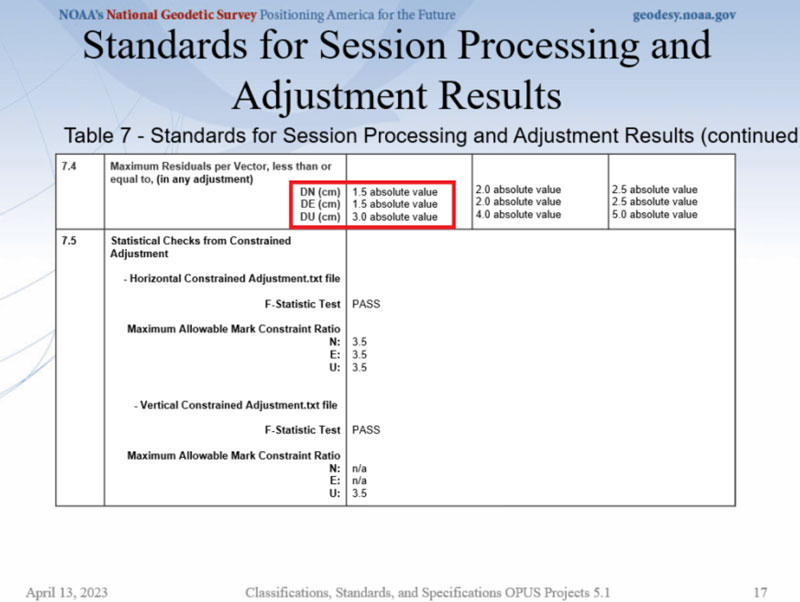
The maximum residual values in dN, dE, and dU are also provided in Table 7. This requirement is important because it helps to ensure that outliers are detected and removed, especially in the height component.
Table 7 continued. (Credit: NGS Website)
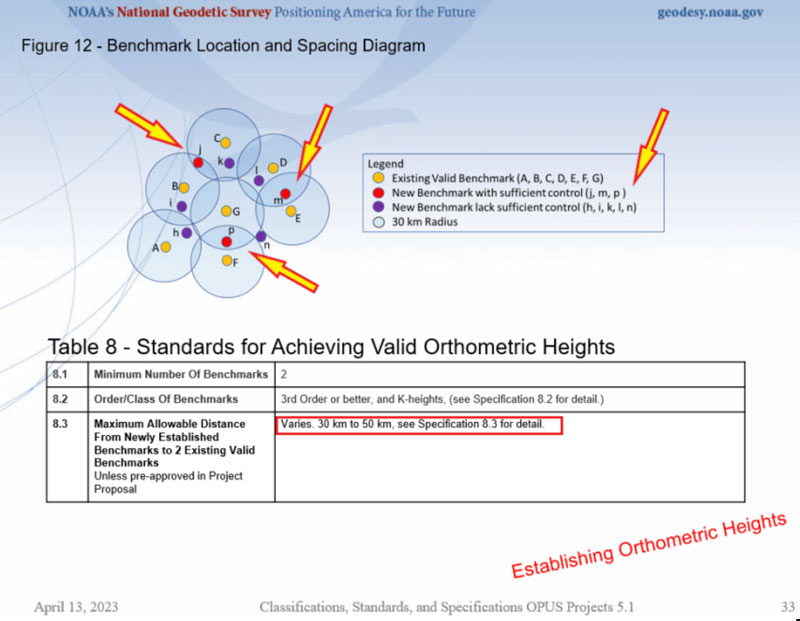
The webinar also had tables and diagrams for establishing orthometric heights. Table 8 and Figure 12 from the webinar provide a summary of the specifications. My January column described the specifications for establishing vertical control in the NSRS in more detail.
Figure 12 from the webinar. (Credit: NGS Website)
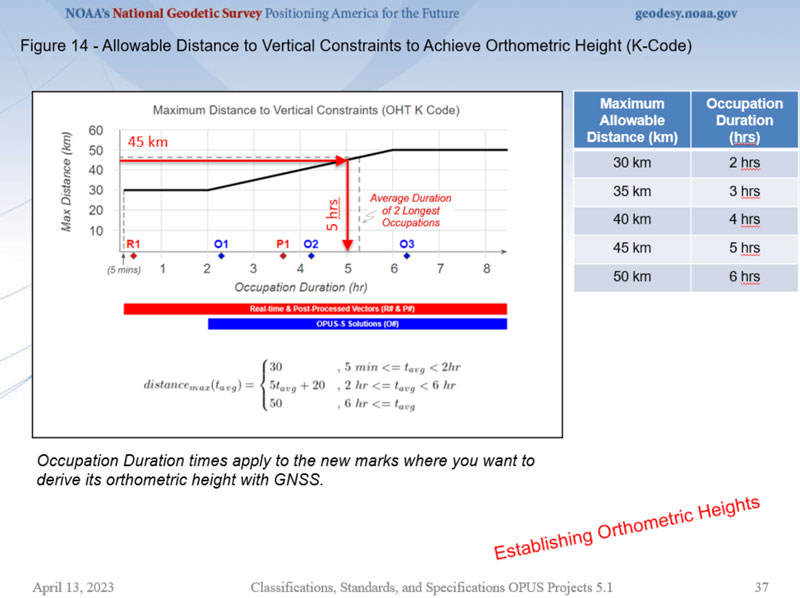
The image below describes specification 8.3 in Table 8. It is important to recognize that the marks that will be used as vertical constraints need to be observed for twoto six hours depending their distance from newly established marks.
Allowable distance to vertical constraints to achieve orthometric height. (Credit: NGS Website)
A lot of information was presented at the webinar and I only highlighted some important sections of it in this column. I would encourage everyone to download the webinar and watch it in its entirety. It should also be noted that NOAA Technical Memorandum NOS NGS 92 is in draft status and is awaiting several final approvals before it is made available for public comment.That said, the webinar’s contents are subject to minor changes as NGS receives feedback. I would encourage everyone to contact the authors with questions and comments.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Image: Apple
Apple Products Meet Accuracy with GPS
Apple launched the Ultra Watch, which contains a dual-frequency GPS antenna that can receive L5 signals, as well as the iPhone 14, which features a dual-band GPS receiver combining the L1 and L5 signals. The company is also harnessing signals from more than 70 satellites to boost the accuracy of its services such as SOS alerts and alerting emergency responders, per The National News. The dual-frequency abilities of the new products provide accurate location for calculating distance, pace and routes. The L5 signals also are a critical component of Apple’s health and safety features, providing more accuracy than in previous products.
Wildlife researchers in Key Largo, Florida, accidently discovered a way to locate and eradicate invasive Burmese pythons, per WFLA News Channel 8. The team of researchers were observing racoons and possums that were fitted with tracking collars to note their behavior. After months of observation, a possum collar sent a mortality signal due to lack of movement. To the researchers’ surprise, the collar then started moving again. They later discovered the possum had been eaten by a python. While this was not the intent of the team’s research, they proved this could be an effective way to lower the increasing population of the invasive python species.
Scientist Liu Shaochuang and his team have used satellite remote-sensing technology to study and track wild camels. Shaochuang studies the interrelationship between endangered animals and their environments, which may help protect the species against climate change. To track a camel, Shaochuang attaches a GNSS-enabled collar, which transmits the camel’s location every day. The short message function is provided by China’s BeiDou satellite system, which transmits and receives signals in real time. Based on the data, Shaochuang and his team can observe migratory paths, living environments and possible threats.
Image: Screenshot of CNN video
Former South Carolina Attorney Convicted with Location Data
On March 3, Alex Murdaugh was convicted of killing his son Paul Murdaugh and wife Maggie Murdaugh. With limited evidence, the prosecution used a phone video and vehicle navigation data to prove Alex’s guilt. During the trial, Alex claimed he was visiting his mother during the time the murders took place. However, General Motors OnStar data accessed by investigators from his Chevrolet Suburban contradicted the alibi, putting Alex at the scene of the crime during the time of the murders. Plus, in a smartphone video taken by Paul that night, Alex’s voice could be heard, placing him at the scene.
Credit: Cloud Ground Control by Advanced Navigation
Cloud Ground Control, an Advanced Navigation company, has released its cellular micro-modem, the CGConnect. Using 4G/5G networks, CGConnect links UAVs or robotic vehicles to Cloud Ground Control’s cloud-based UAV fleet management platform — enabling live-streaming, command and control from a web browser.
CGConnect can securely connect UAVs and vehicles into one autonomous fleet across land, sea and air, regardless of manufacturer or model. This provides mission planners and operators with full situational awareness for search and rescue, emergency response and disaster relief.
Artificial intelligence (AI) algorithms run in the cloud, relaying real-time camera feed data to the end user to support missions such as object detection, tracking and thermal imaging. The flexible and customizable open platform operates on industry standards, which multiplies potential product applications and enables autonomous vehicles and payloads to operate as a coordinated fleet.
CGConnect’s high-grade security safeguards data and IP from vulnerabilities and security breaches, helping users meet compliance obligations. Additionally, CGConnect supports edge AI to perform intensive object identification and classification directly on the vehicle for dynamic missions.
CGConnect is available for pre-order. An OEM option is also available.
Lt. Col. Robert O. wray commands the 2nd Space Operations Squadron (2 SOPS), which operates GPS around the clock supplemented by members of the 19th Space Operations Squadron (19 SOPS). (Credit: U.S. Space Force photo by Dennis Rogers)
Exclusive GPS World interview with the commander of the unit that operates the GPS constellation
The entire Global Positioning System constellation comprised of 38 satellites — with its billions of users and myriad military, commercial, consumer and scientific applications — is controlled from one room in a gray office building on a small military base about nine miles east of Colorado Springs, Colorado. The base is Schriever Space Force Base (SFB) and the room is the “operations floor” of the GPS Master Control Station (MCS). It is staffed by members of the 2nd Space Operations Squadron (2 SOPS), an active-duty unit of the U.S. Space Force, supplemented by members of the 19th Space Operations Squadron (19 SOPS), a unit of the U.S. Air Force Reserve. The two squadrons are known collectively as “Team Blackjack.”
Lt. Col. Robert O. Wray is the commander of 2 SOPS and of those 19 SOPS members assigned to the MCS. On March 16, at Schriever SFB, Wray spoke at length with GPS World’s editor-in-chief, Matteo Luccio, about the training and duties of his team members, the challenges they face, and what brought him to his current assignment. He then gave Luccio a tour of the MCS and introduced him to each of the 10 people on duty. At any given time, eight of these operators are military personnel and two are civilian contractors. They receive feeds from a worldwide network of monitor stations and ground antennas, including telemetry from the satellites, that enable them to precisely monitor the satellites’ orbits and the state of their systems. The operators upload data and commands to the satellites around the clock to keep the constellation fine-tuned and respond to changing circumstances.
An abridged version of the interview will appear in the May issue of GPS World. A longer version will appear here on May 1.
The Association for Unmanned Vehicles Systems International (AUVSI) has announced the finalists for its sixth annual XCELLENCE Awards. The winners will be announced during an awards ceremony at AUVSI XPONENTIAL 2023 at the Colorado Convention Center in Denver.
The AUVSI XCELLENCE Awards honor innovators who demonstrate commitment to advancing technology, leading and promoting safe operations and developing programs that use unmanned systems to improve the human conditions.
“XCELLENCE IN ACADEMIC RESEARCH”
• Neural10, Autonomous Navigation in GPS-Denied Zones
• Ocean Alliance, Tagging Whales with Drones
• University of Colorado Boulder, 20 Years of UAS Research XCELLENCE
• University of Michigan, Alireza Mohammadi
• Virginia Tech’s Mid-Atlantic Aviation Partnership, Robert Briggs
“XCELLENCE IN INNOVATION”
• Austal USA, Austal MCS
• Plus, PlusDrive, An Industry-defining Driver-in, Highly Automated Driving (HAD) Solution
• Sentera, Eliminating Stitching with the Sentera DGR System
• Skydio, Skydio Dock, Automated Inspections of Sites with Autonomous, Remote Drone Operations
• UPS Flight Forward, Inc., Safety Management System First in the Industry Accepted by the FAA
“XCELLENCE IN OPERATIONS”
Enterprise Application
• Advanced Navigation, Cloud Ground Control
• City of Pendleton, Pendleton UAS Range
• JobsOhio and the Ohio Department of Transportation, Propelling AAM in Ohio
“XCELLENCE IN TECHNOLOGY”
Enabling Components & Peripherals
• Elsight, Elsight Halo
• infiniDome, infiniDome’s GPSdome2
• LEMO Corporation, LEMO M Series High Power
• MatrixSpace, MatrixSpace Networked Radar
• SBG Systems, Quanta Micro
• Advanced Navigation, Cloud Ground Control
• AlarisPro, Inc., AlarisPro Safety Ecosystem (ASE) – Advancing UAS Reliability Through Shared Data Across UAS Operators and Manufacturers
• BlueSpace.ai, Scalable and Explainable AI for Autonomy, powered by 4D Predictive Perception
• Skydio, Skydio Scout, Situational Awareness for Moving Convoys
• VOTIX, VOTIX
“XCELLENCE IN WORKFORCE DEVELOPMENT”
• DroneUp, with partner, Richard Bland College, Established the First Commercial Drone Workforce Training Program for College Credit
• Embry-Riddle Aeronautical University Worldwide and Warren College, Better Together: Producing Effective Educational Opportunities for the UAS Workforce
• Fullerton College, Fullerton Drone Lab, Drone Piloting Registered Apprenticeship
• Laurel Ridge Community College, Laurels Take Flight
• National Robotics Education Foundation NREF, National Robotics Education Foundation (NREF)
“XCELLENCE IN MISSION”
Humanitarian Project or Program
• ArroTech, Rapid and Accurate Autonomous UXO Detection
• MissionGO, Inc., Operation Healing Eagle Feather
• Near Earth Autonomy, Autonomous Aerial Blood & Medical Supply Delivery to the Wounded
• The David McAntony Gibson Foundation (GlobalMedic), GlobalMedic RescUAV Response to La Soufrière Volcano in Saint Vincent and the Grenadines
• UCAL Fuel Systems Limited, Drone Based Disaster Relief
Public Safety
• Brookhaven GA Police Department, Brookhaven Police sUAS Team
• DRONERESPONDERS, DRONERESPONDERS Public Safety Alliance
• Hidden Level, Inc., Airspace Monitoring Service (AMS)
• Texas Department of Public Safety, Texas Department of Public Safety
• United States Forest Service, Testing and Scaling New Technologies for Operations and Safer Mixed Airspace Ops
The European Space Agency (ESA) and the One Sea Association — a non-profit global alliance of commercial manufacturers, integrators and operators of maritime technology, digital solutions, and automated and autonomous systems — are partnering to promote the development of space-enabled services that aim to support the maritime sector’s transition to autonomous shipping.
This partnership will combine expertise in the maritime sector and in autonomous shipping from One Sea with technical competence and mandate through the Business Applications and Space Solutions program from ESA to support the development and demonstration of space solutions in addressing user needs.
Topcon Positioning Systems has made an investment in DDK Positioning, a UK-based GNSS receiver and precise point positioning correction services company. DDK Positioning delivers services over the Iridium network to provide global precision positioning services that can augment GNSS constellations enhancing accuracy for critical industrial applications.
“With the expansion and growing success of this business, specifically in the marine sector, a closer cooperation will ensure optimal integration for the highest possible accuracies and performance in the most demanding applications,” Ian Stilgoe, vice president of Emerging Business at Topcon, said.
“This partnership provides an extraordinary opportunity for our two companies to work together in pursuit of our shared ambition — providing a robust, resilient and truly unique GNSS positioning service,” Kevin Gaffney, CEO of DDK Positioning, stated.