We asked our Editorial Advisory Board (EAB) which emerging sectors are driving the most demand for advanced positioning and timing solutions right now?
“The defense sector needs an off-the-shelf GNSS module that is small, light and low power, yet also highly resilient — such as a military-grade location system — to satisfy the insatiable growth in drones. While this segment is about a tenth of the total commercial vehicle market, it is significant compared to the emerging autonomous driving segment, where the need for resilience is still trying to figure out the cost-benefit of mitigating intentional interference.”
“If I had to pick newly emergent sectors with the highest need for precise and continuous PNT, I would say the autonomous system operations sector and portion of the artificial intelligence (AI) sector. AI cannot provide spatially or temporally ‘intelligent’ support if it does not have access to precise positioning and timing information from outside itself. PNT sources do not depend on AI, but ‘autonomous’ AI must have reliable PNT.
“The primary driver is the broad adoption of autonomy and automation across industries such as construction, logistics, agriculture, infrastructure, defense, or even entertainment. Amplifying this demand is the proliferation of smaller and lighter UAVs, drones and robots. Where a single manned platform once required one navigation system, a drone swarm may require hundreds or thousands of units. It is the combination of these two forces, adopting autonomy and automation and multiplying platforms, that is driving demand growth.”
For many, the meaning of advanced positioning and timing solutions equates to solutions that provide higher accuracy and precision. For me, achieving an advanced PNT solution must require equal focus on the other PNT metrics — availability, integrity, continuity and coverage. Given the tumultuous state of the world these days, there is an emerging demand for solutions that enable resilient PNT in the defense sector, the commercial aviation and maritime sectors, in telecommunications and in power
CGI, one of the largest independent IT and business consulting services firms in the world, has entered an alliance partnership agreement with Vantor, provider of unified spatial intelligence from space to ground. The companies have signed a Letter of Intent outlining their plans to collaborate on developing next-generation solutions that combine CGI’s advanced artificial intelligence (AI), edge computing and visual analytics expertise with Vantor’s Spatial Intelligence platform Tensorglobe and its Raptor product for navigation and geolocation in GNSS-denied environments.
The collaboration will enhance mission effectiveness and real-time situational awareness across defense, national security and environmental domains. CGI and Vantor will deliver integrated intelligence solutions that combine AI, spatial intelligence, space-based sensing and digital platforms, enabling faster, more informed decision-making in increasingly complex operational environments.
The partnership reflects growing demand for interoperable, sovereign and commercial solutions that strengthen operational resilience in a changing geopolitical and environmental landscape.
“We are bringing together complementary strengths in AI-driven analytics and secure, scalable access to satellite data through this collaboration with Vantor. As governments and industry organisations look to improve resilience and responsiveness, integrating near-real-time space-based intelligence into digital command and control networks will be key to achieving decision advantage,” said John Hanley, Secure Mission Critical Solutions, CGI.
“Collaborating with CGI allows us to extend the reach of Vantor’s technology and apply it to new use cases that demand both agility and precision. Our combined capabilities will help defense and civil government customers derive actionable intelligence faster and more securely, supporting safer operations and smarter use of global data assets,” said Anders Linder, general manager, Vantor International.
The companies seek to develop solutions that fuse CGI Machine Vision and CGI SignalSense platforms with Vantor’s Tensorglobe services to enhance high-precision geo-positioning and imagery analytics. Integration with Vantor’s Raptor products will support users operating in GNSS denied or degraded environments to navigate and position coordinates. The collaboration will pursue opportunities across the UK, Europe, and allied markets for AI-enabled edge computing and space-based situational awareness capabilities.
Ionospheric delay remains a significant error source in GNSS positioning, particularly for single-frequency users and during periods of enhanced space weather activity (Dabbakuti, 2021). While global and regional ionospheric models provide large-scale corrections, they often fail to represent localized ionospheric variability at individual receiver locations (Jee et al., 2010; Osanyin et al, 2025).
Consequently, residual ionospheric errors persist in positioning solutions, degrading accuracy for applications including precise point positioning (PPP), real-time navigation, and single-frequency GPS users (Biswas et al., 2022). Hence, accurate modeling of the ionosphere is essential in tackling the principal challenges in high-precision GNSS positioning.
Vertical total electron content (VTEC), a key driver of ionospheric delay, exhibits strong nonlinear temporal variability controlled by solar radiation, geomagnetic activity, seasonal effects, and local electrodynamics (Osanyin et al., 2023; Seemala et al., 2023). Capturing this variability at individual GNSS stations poses a significant challenge. Advances in artificial intelligence (AI), i.e., machine learning (ML) techniques have emerged over the decades as powerful tools for approximating complex non-linear systems and deterministic geophysical processes, while significantly reducing computational cost (Sarker, 2021). As such, they have successfully replaced repeated full-scale numerical simulations by learning input-output relationships directly from data (Zhang et al., 2025). This paradigm shift is particularly relevant for ionospheric modeling, where long-term GNSS observations provide rich time series well suited for data-driven learning.
Time series forecasting traditionally relies on statistical models such as autoregressive (AR), moving average (MA), autoregressive moving average (ARMA), and autoregressive integrated moving average (ARIMA), which model future values as linear functions of past observations (Kaselimi et al., 2020). They have been widely employed to predict VTEC by extrapolating historical observations. Nonetheless, the classical approaches are inherently limited by assumptions of linearity, stationarity and short-term memory, which restrict their ability to capture complex ionospheric dynamics, particularly during disturbed conditions and over longer prediction horizons. To address these limitations, this study adopts a deep learning-based framework using long short-term memory (LSTM) neural networks for station -pecific VTEC prediction. Unlike conventional statistical models, LSTM networks are specifically designed to learn non-linear temporal relationships and retain long-term memory in sequential data (Hochreiter and Schmidhuber, 1997).
Essentials
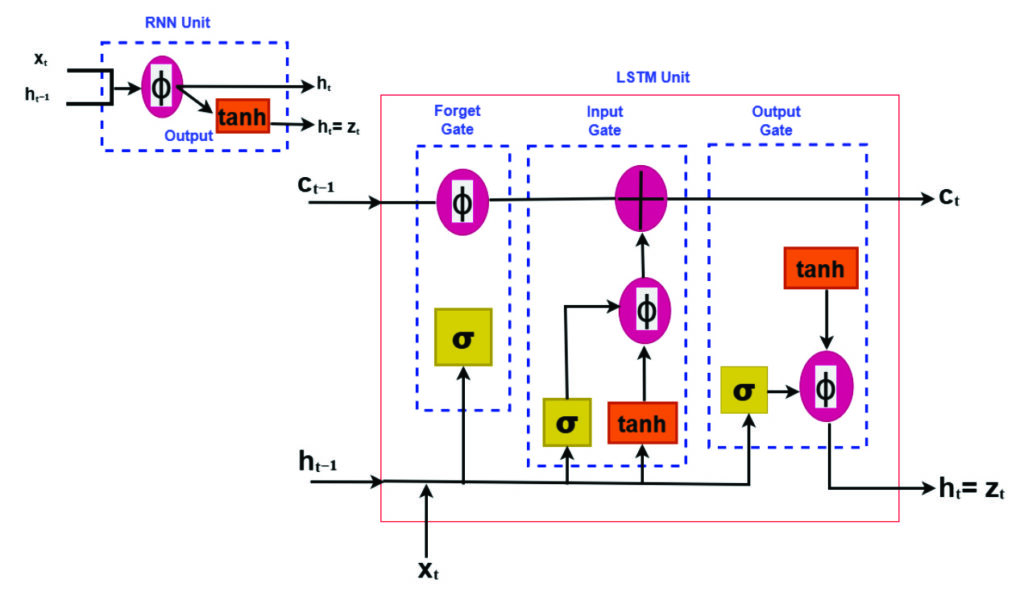
LSTM neural networks for prediction have emerged as a powerful tool for time-series prediction (Hochreiter and Schmidhuber, 1997). LSTM is a type of recurrent neural networks (RNNs) that takes sequences of information and uses recurrent mechanisms and gate techniques (see Figure 1). RNNs are well known for their ability to process single data points and entire data sequences (Gonzalez and Yu, 2018). The LSTM model has various forms for different types of data inputs. The basic condition of LSTM modeling is that all inputs and outputs are independent of each other. The key to the LSTMs is the cell state, which is protected and controlled by the forget, input and output gates, respectively (Gonzalez and Yu, 2018).
FIGURE 1 Comparison of recurrent neural network (RNN) and long short-term memory (LSTM) structures.
Training deep learning modelsremains computationally demanding despite their fast prediction capability. LSTM networks consist of interconnected layers with numerous trainable parameters that must be optimized iteratively to accurately capture temporal dependencies in the data. Training typically involves large historical datasets spanning multiple years, which is necessary to expose the model to varying ionospheric conditions, but also increases computational effort (Thompson et al., 2020). The optimization process relies on iterative algorithms such as stochastic gradient descent and variants, requiring repeated forward and backward passes through the network. As the depth of the model and the length of input sequences increase, so does the demand for memory and processing power. These challenges are particularly relevant when training is performed using graphics processing units (GPUs), where memory limitations and data transfer overhead must be carefully managed (Sarker, 2021).
Like all neural networks, LSTM has trainable parameters (weights and biases). These parameters are optimized by minimizing a loss function using gradient-based optimization. Due to its ability to learn time sequences, gradients must be propagated across time steps, not only across layers. This process is accomplished using backpropagation through time, which computes gradients of the loss with respect to all parameters and accumulates gradients across the sequence. The major advantage of LSTM is the use of its gating mechanism in mitigating vanishing gradients, making backpropagation practical for long time series such as VTEC (Adekunle et al., 2025; Hochreiter and Schmidhuber, 1997; Noor and Ige, 2025).
In recent years, LSTM networks have achieved impressive results in modeling complex physical systems characterized by strong non-linearity and long-term temporal dependencies. Notably, LSTM-based approaches have been successfully applied to atmospheric and geophysical time series, demonstrating superiority in predictive skill compared to traditional empirical and statistical models (see Reddybattula et al. (2022 and references therein). These research results show the capability of LSTM to capture diurnal, seasonal, and storm-time variations. By leveraging historical GNSS-derived VTEC time series, LSTM-based models can adaptively capture both regular ionospheric patterns and transient disturbances, enabling more accurate and robust VTEC forecasts. This data-driven approach directly supports improved ionospheric correction in GNSS positioning, offering a practical and scalable solution to overcome the shortcomings of traditional time series methods.
This study focuses a station-specific vertical total electron content (VTEC) prediction framework based on long short-term time series. The proposed framework treats VTEC prediction as a supervised regression problem. A sequence of past VTEC observations is used to predict future values over one or multiple forecast horizons. Also, emphasis is placed on methodology clarity, practical implementation, and positioning relevance.
Elements: TEC estimation from GNSS measurements
For the purpose of forecasting local VTEC using time series analysis, this study utilized the GPS dataset provided by the Brazilian Institute for Geography and Statistics (RBGE; www.ibge.gov.br/en/) over Santa Maria (SMAR; -20.72o, 306.28o), a station located in Brazil over the period of 10 years from January 2010 to December 2019.
VTEC data were derived from dual-frequency GPS observations at the selected station using the standard ionospheric processing techniques, including slant TEC estimation, instrumental bias correction, and mapping to vertical TEC. For more details, readers can consult the GPS-TEC analysis software developed by Seemala and Valladares (2011), which has been employed in this study for TEC processing. The time resolution is selected to be 15 minutes following an average over a sampling interval of 30 seconds. The resulting VTEC time series provides a continuous record of ionospheric variability with a fixed temporal resolution.
Station-specific LSTM modeling framework
A structured deep learning workflow for station-specific VTEC prediction has been adopted using the LSTM framework. The overall methodology follows a sequential pipeline consisting of data collection, preprocessing, feature engineering, model training, evaluation, validation, and deployment. This workflow ensures reproducibility, minimizes information leakage, and facilitates integration into GPS positioning engines. The focus is on time series learning at a single station, where temporal dependencies dominate and spatial smoothing from regional or global models is undesirable.
Data preparation and model training
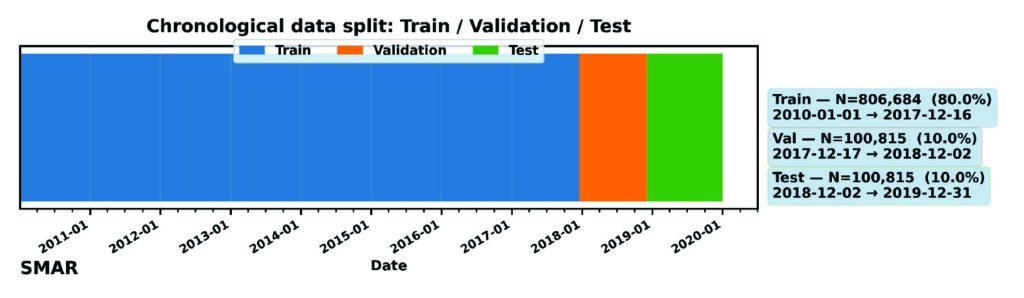
High-quality input data are essential for stable LSTM training. The extracted VTEC time series are preprocessed to remove cycle slips, mitigate differential code biases, and ensure consistent temporal sampling. As shown in Figure 2, for this model (as variations can be considered), the dataset has been divided into training (80%), validation (10%), and testing (10%). The validation is mostly required during training the LSTM deep learning model to ensure generalization and prevent overfitting. Furthermore, preprocessing aims at ensuring capability of the model in handling missing data and temporal consistency checks.
FIGURE 2 Chronological splitting of VTEC dataset for machine learning.
Feature engineering mainly converts raw VTEC observations into structured model inputs such as local time (LT) and day-of-year (DOY) features. These features are normalized prior to training, although normalization is applicable to only the training dataset to avoid future leakage. The model consists of an input layer whose dimension equals the number of input features, followed by a single LSTM layer with 64 memory cells to learn temporal dependencies in the input sequence. A dropout layer with a rate of 0.2 is applied to mitigate overfitting during training. The LSTM representation is then passed to a fully connected (Dense) regression head with nout neurons, where nout equals the number of forecast lead times. Model training minimizes the Huber loss function using gradient-based optimization, while performance is evaluated using RMSE. The optimizer updates the network weights iteratively to reduce the forecast error across the training samples. Early stopping and regularization are applied to further prevent overfitting, particularly during periods of low ionospheric variability. The final outputs are the predicted VTEC at multiple lead times (in this experiment: 30, 60, 120 and 180 minutes). The trained model is suitable for deployment in near real-time ionospheric correction systems: once operational, it ingests the most recent VTEC observations and produces short-term forecasts that can be integrated into GNSS positioning workflows, particularly for single-frequency applications and PPP.
Performance evaluation and baseline comparison
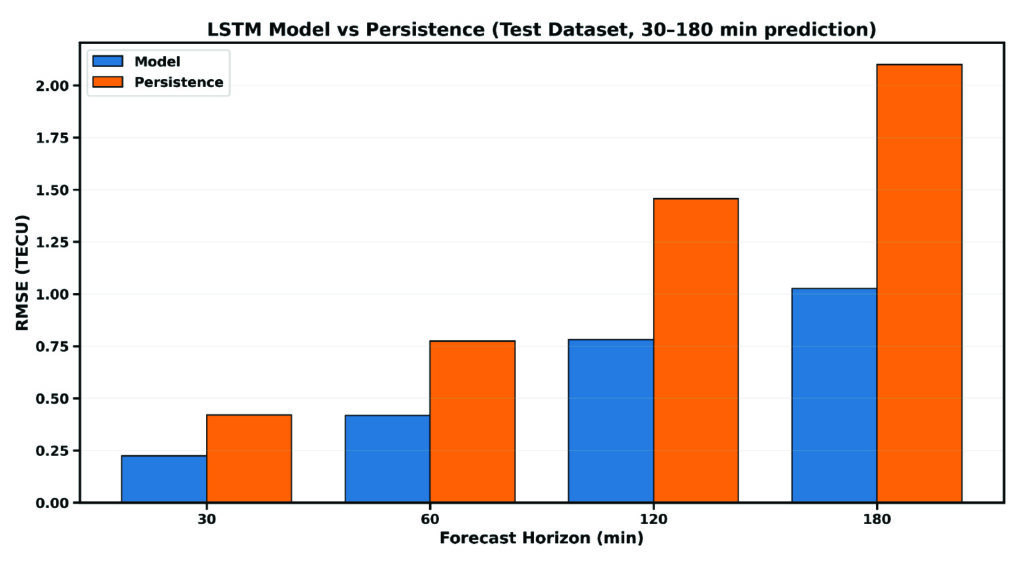
For practical assessment, the LSTM-based predictions are evaluated against commonly used baseline models, including persistence (using the trained model with new data) and skill (the ability of the model to make predictions). These baselines represent the minimum performance expected in operational GNSS ionospheric modeling and serves as internal validation of the overall model’s performance. Evaluation metrics include, but are not limited to, root mean square error (RMSE), mean absolute error (MAE), and relative improvement over persistence (skill). Figure 3 compares the predictive performance of the proposed LSTM model against the persistence baseline on the independent dataset. RMSE increases over time, while persistence largely deviates from the LSTM model, showing the great strength and capability of the LSTM model for time series prediction over the Santa Maria station. For instance, the RMSE of the LSTM model increases from 0.24 TECU to 1.15 TECU from 30 minutes to 3 hours lead time, while that of persistence ranges from 0.41 TECU to 2.25 TECU, respectively.
FIGURE 3 Comparison between the RMSE of the LSTM model and persistence for single-station VTEC prediction.
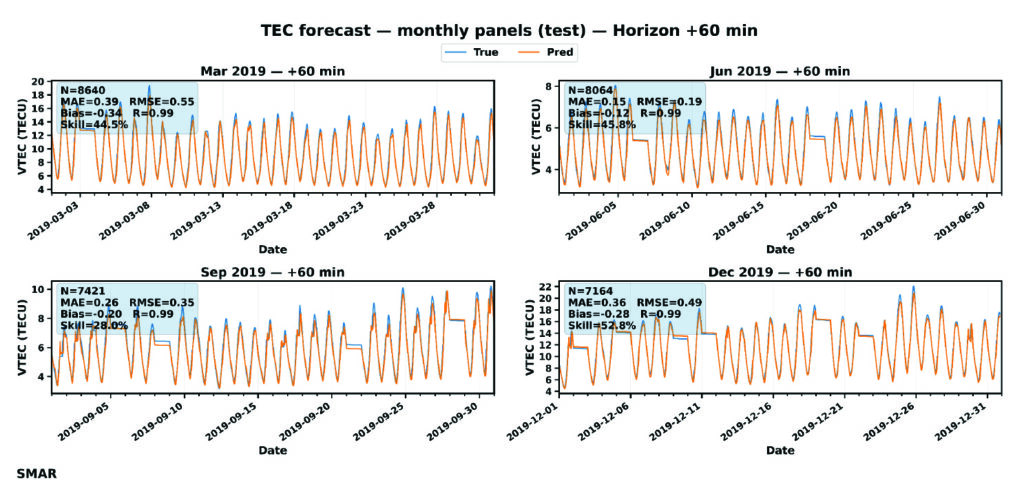
For further evaluation, day-to-day variation of VTEC at 60 minutes lead time is shown in FIGURE 4. GPS TEC (orange curves) shows a strong diurnal cycle with expected daily peaks, while forecast (blue curves) matches these peaks across months, indicating that the LSTM captures the key deterministic component of TEC variability. TABLE 1 or the embedded metrics in Figure 4 summarizes an overall accuracy of the LSTM model using the performance metrics: MAE, RMSE, Bias, R, and skill. MAE and RMSE values change with season — with the lowest reported in July.
FIGURE 4 Day-to-day variation of VTEC at 60 minutes forecast during July to December 2019. The embedded metrics show the performance of the LSTM model for each month of the testing dataset.
Error increases toward December with the largest RMSE in March (0.549 TECU). September shows moderate error levels. Also, correlation is consistent across all months, which confirms the model’s capability to capture TEC changes and day-to-day variability patterns. The model is nearly unbiased as the bias is consistently close to zero, meaning that the LSTM does not drift systematically and shows that the model underpredicts GPS VTEC. This characteristic is important for operational GNSS corrections, because biased VTEC forecasts would translate to persistence positioning errors. Going by the skill values, even at 60 minutes forecast, the model provides ~27%-52% improvement over persistence. This result implies a major indicator of real predictive ability, especially for GNSS applications.
Statistical validation
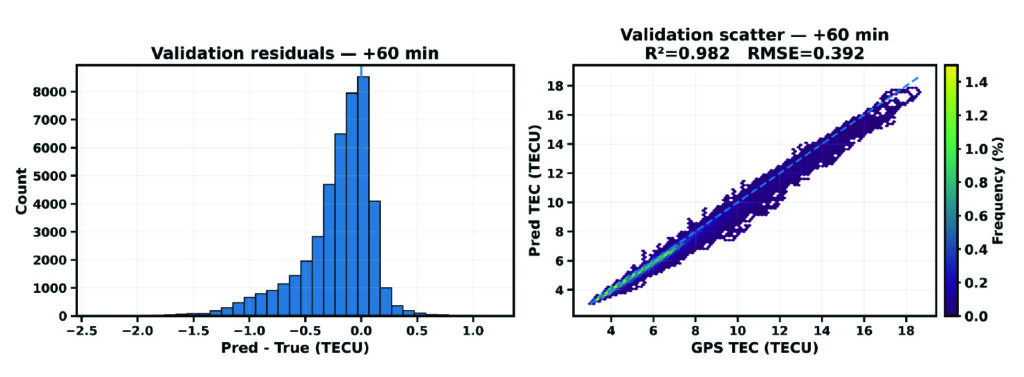
Figure 5 presents the diagnostic of the validation dataset for the SMAR station at a 60-minute forecast horizon. It combines the distribution of prediction residuals (left) and density-based scatter comparison between predicted and observed VTEC values. These analyses help explain the overall agreement of the LSTM model forecast during validation.
FIGURE 5 Validation diagnostics at 60 minutes forecast horizon. (Left) Histogram of prediction residuals. (Right) Density scatter of predicted versus observed TEC.
The residual distribution is mostly concentrated near zero, which implies that most predictions deviate only slightly from observations. The right plot shows the scatter density plot of predicted VTEC against observed GPS VTEC. The points are tightly clustered along the dashed line, indicating that the model corresponds very well (98.2%) to the TEC variance in the validation period. Also, a RMSE of 0.39 TECU reflects a relatively low magnitude error. These findings support the reliability of the proposed LSTM model for VTEC forecasting.
Implications for GNSS Positioning
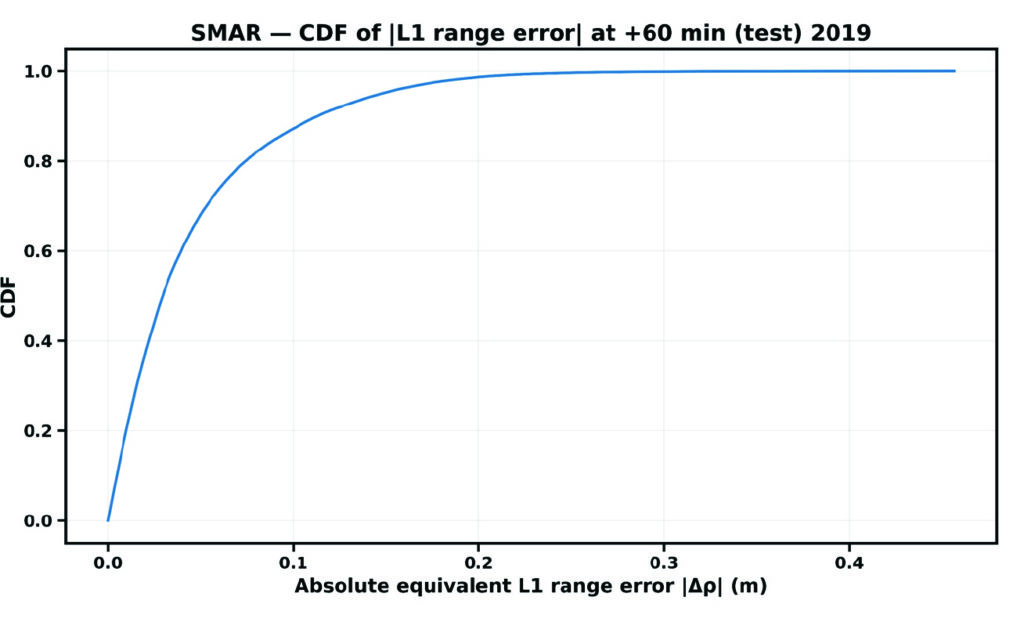
The cumulative distribution function (CDF) of the absolute equivalent L1 error, denoted by |∆ρ|, for the Santa Maria station at a forecast horizon of 60 minutes is shown in Figure 6.
FIGURE 6 CDF of residual VTEC equivalent L1 ranging error at the single station.
The CDF provides a direct positioning-relevant interpretation of model performance. The steep rise at small error values indicates that most samples exhibit low residual range errors, demonstrating strong correlation performance.
Evolutionary
This study demonstrates that LSTM-based machine learning provides a practical and effective approach for station-specific GNSS VTEC prediction during low solar activity. The LSTM model accurately reproduces diurnal and seasonal VTEC variability at the station level. Forecast skill remains stable across increasing horizons, while significant RMSE reductions over persistence confirm the model’s predictive value, supporting the feasibility of LSTM-based station-specific VTEC forecasting for operational GNSS applications. By leveraging historical GPS-derived VTEC time series, LSTM neural networks capture complex temporal dependencies that are difficult to model using conventional techniques. This approach offers a valuable complement to existing ionospheric correction models and represents a promising direction for future GNSS positioning systems. The results presented in Table 1 confirm that the proposed LSTM algorithm can derive an accurate predictive model as far as a 3-hour forecast. The proposed approach improves long-term ionospheric prediction and enhances positioning accuracy.
Month
MAE (TECU)
RMSE (TECU)
Bias (TECU)
R
Skill
Mar
0.39
0.55
-0.34
0.993
44.5
June
0.15
0.18
-0.12
0.994
25.8
Sep
0.26
0.35
-0.20
0.986
28.0
Dec
0.36
0.49
-0.28
0.994
52.8
Table 1 Comparison of VTEC performance metrics of the LSTM model at 60 minutes forecast.
While the results demonstrate the potential of AI-based modeling for station-specific VTEC prediction, further investigation is required to assess its limitations. Future research will investigate the sensitivity and robustness of the data-driven approach under extreme geomagnetic storm conditions and maximum solar activity considering multiple stations over the same region. These experiments will help evaluate the LSTM-based modeling reliance for a better positioning GPS accuracy. In addition, combining efficient training strategies with LSTM-based temporal learning offers a practical and scalable solution to station-specific VTEC prediction. The resulting models will bridge the gap between computationally expensive physics-based approaches and overly simplified empirical models, providing accurate, localized ionospheric corrections that directly enhance GPS positioning performance. Therefore, the Bayesian optimization technique would be integrated during model’s training to tune LSTM hyperparameters (Adekunle et al., 2025), with the aim of reducing computational cost and improving convergence and generalization in station-specific ionospheric modeling. It is very likely that machine learning will play a significant role in near-term ionospheric modeling/prediction for GNSS.
Dr. Taiwo Osanyin is a Ph.D. visitor at York University, Toronto, Canada. Her research interests include space physics, atmospheric sciences, statistics, and modeling of the upper atmosphere. Osanyin received a Ph.D. in space geophysics from the National Institute for Space Research, Brazil, an M.Sc. in nuclear science and engineering from Obafemi Awolow University, Nigeria, and a B.Sc. in engineering physics from Obafemi Awolow University, Nigeria.
Sunil Bisnath is a full professor in the Department of Earth and Space Science and Engineering at York University in Toronto. For more than 25 years, he has been actively researching precise GNSS-focused positioning and navigation solutions and applications. He holds an Honors Bachelor of Science degree and master of science degree in surveying science from the University of Toronto and a Ph.D. in geodesy and geomtics engineering from the University of New Brunswick.
• Adekunle AA, Fofana I, Picher P, Rodriguez-Celis EM, Arroyo-Fernandez OH, Zemouri R. (2025). Optimizing deep learning predictive models: A comprehensive review of RNN and its variant architectures. Applied Soft Computing. Oct 9:114015.
• Biswas T, Banerjee P and Paul A (2022). Impact of low-latitude ionospheric effects on precise position determination. Radio Science, 57(4): 1-11.
• Dabbakuti JK (2021). Modeling and optimization of ionospheric model coefficients based on adjusted spherical harmonics function. Acta Astronautica, 182: 286-294.
• Gonzalez J and Yu W (2018). Non-linear system modeling using LSTM neural networks. IFAC-PapersOnLine, 51(13): 485-489.
• Hochreiter S and Schmidhuber J (1997). Long short-term memory. Neural Computation, 9:1735-1780.
• Jee G, Lee HB, Kim YH, Chung JK, Cho J (2010). Assessment of GPS global ionosphere maps (GIM) by comparison between CODE GIM and TOPEX/Jason TEC data: Ionospheric perspective. Journal of Geophysical Research: Space Physics. 115: A10.
• Kaselimi M, Voulodimos A, Doulamis N, Doulamis A, Delikaraoglou D. (2020). A causal long short-term memory sequence to sequence model for TEC prediction using GNSS observations. Remote Sensing. 12(9): 1354.
• Noor MH and Ige AO (2025). A survey on state-of-the-art deep learning applications and challenges. Engineering Applications of Artificial Intelligence. 159: 111225.
• Osanyin TO, Candido CM, Becker-Guedes F, Migoya-Orue Y, Habarulema JB, Obafaye AA, Chingarandi FS, Moraes-Santos SP (2023). Performance of a locally adapted NeQuick-2 model during high solar activity over the Brazilian equatorial and low-latitude region. Advances in Space Research. 72(12): 5520-38.
• Osanyin TO, Maria Nicoli Candido C, Becker-Guedes F, Migoya-Orue Y, Habarulema JB (2025). Ingestion of GNSS-Derived-TEC Into NeQuick 2 Model Over South America. Space Weather. 23(12): e2024SW004212.
• Reddybattula KD, Nelapudi LS, Moses M, Devanaboyina VR, Ali MA, Jamjareegulgarn P, Panda SK (2022). Ionospheric TEC forecasting over an Indian low latitude location using long short-term memory (LSTM) deep learning network. Universe. 8(11): 562.
• Sarker IH (2021). Deep learning: a comprehensive overview on techniques, taxonomy, applications and research directions. SN Computer Science. 2(6): 1-20.
• Seemala GK, Katual I, Kapil C, Vichare G (2023). Seasonal and solar activity dependence of TEC over Bharati station, Antarctica. Polar Science. 38: 101001.
• Seemala GK, Valladares CE. Statistics of total electron content depletions observed over the South American continent for the year 2008 (2011). Radio Science. 46(05): 1-4.
• Thompson Neil C, Kristjan G, Keeheon L, Manso Gabriel F (202). The computational limits of deep learning. Cornell University, arXiv:2007.05558, 10: 2.
• Zhang R, Li H, Shen Y, Yang J, Li W, Zhao D, Hu A (2025). Deep learning applications in ionospheric modeling: progress, challenges, and opportunities. Remote Sensing. 17(1): 124.
The latest generation of Safe Pro’s AI technology will be presented at U.S. Army exercise at Fort Hood, Texas
Safe Pro Group, a developer of artificial intelligence (AI)-enabled defense and security solutions, has deployed upgraded AI algorithms to its patented Safe Pro Object Threat Detection (SPOTD) technology for drone operations in GPS-denied environments.
The newly enhanced SPOTD capabilities will be prominently featured at the upcoming U.S. Army 2026 Concept Focused Warfighter Experiment (CFWE) technology demonstration taking place at Fort Hood, Texas.
Operating on the Amazon Web Services (AWS) Cloud or at the Edge, SPOTD is Safe Pro’s patented rapid battlefield image analysis platform designed to identify and map small explosive threats such as landmines and ambush drones detected in videos collected from virtually any drone.
The ability for SPOTD to rapidly detect threats and create 2D/3D models from drones flying in GPS-denied environments was developed after real-world exercises in Ukraine at the request of end users. The integration of these new algorithms further enhances the value of SPOTD as a situational awareness tool for use in a wide array of military reconnaissance and planning operations.
SPOTD enhancements include:
Ability to process any drone video data: Turning video clips into 2D and 3D models with AI-trained explosive threat detections
Enhanced operational robustness: Operating capability in GPS and GPS/GNSS denied environments
Terrain modeling: Threat and terrain mapping in support of unmanned ground vehicles (UGVs) route planning
Rapid mapping-only mode: Mapping for intelligence, surveillance and reconnaissance (ISR) and missions that do not require AI-powered threat detections
Accelerated processing: Up to 10x reduction in processing time powered by Safe Pro’s proprietary geospatial AI algorithms.
Powering the company’s SPOTD technology is Safe Pro’s unique real-world datasets, which include high-resolution drone imagery and GPS-tagged geospatial data encompassing more than 2.2 million drone images analyzed to date, and 41,400+ threats identified across 11,400 hectares (28,000+ acres).
HERE Technologies has expanded its partnership with Precisely, a data integrity company, to provide accurate and reliable location intelligence for business use cases across industry sectors.
The partnership builds upon location intelligence capabilities within the Precisely Data Integrity Suite, giving companies deeper analysis, validation, and governance of their location data.
Through the partnership, HERE and Precisely use machine learning (ML) and artificial intelligence (AI) to collect and analyze location data, creating real-time updates that guide important business decisions like property management and analysis, among other business operations. The companies are working together to provide complete and accurate datasets to drive AI-powered intelligence for businesses.
The Precisely Data Integrity Suite delivers the trusted location intelligence that organizations need to power critical business decisions. The suite verifies, standardizes, and geocodes address data with high levels of accuracy and enriches it with robust contextual datasets. This combination of accuracy, consistency, and context helps businesses understand where things happen and why, enabling smarter risk assessment, optimized service delivery, and more targeted customer engagement. With governance and transparency built in, the Data Integrity Suite ensures location data is AI-ready and reliable for even the most regulated industries.
HERE’s Privacy Charter reinforces the company’s commitment to promote responsible privacy and security practices, including data minimization and anonymization. The company has a robust portfolio of certifications in security, privacy and cloud governance, including ISO 27001, SOC 2, TISAX, HITRUST r2, CSA STAR and ISO/IEC 42001, the first international standard specifically designed to guide organizations in managing AI systems responsibly.
Most people appear to be silently waiting for artificial intelligence (AI) to come up with a meaningful application beyond replicating jobs — one that actually helps people accomplish new tasks.
Daily news reports show one of the so-called “Magnificent Seven” technology companies pouring another billion dollars or more into AI data centers or basic development. Well now, the Defense Advanced Research Projects Agency (DARPA) has found a smaller AI company to develop a novel application for UAVs.
VISTA X-62A autonomous aircraft (Photo: Alex Lloyd/U.S. Air Force)
PhysicsAI has contributed AI “agents” to a highly modified F-16 for machine perception, intelligent behavior, control and adaptive learning to create an autonomous UAV, according to available information. The VISTA X-62A participated in a manned-unmanned dogfighting demonstration in September 2023, though the outcome has not been disclosed. Other platform enhancements include intelligent sensors through computer vision, EO/IR/RADAR sensor fusion and virtual reality simulations.
DARPA has engaged PhysicsAI to enhance UAVs so they can extend range and mission length by “soaring” — the technique birds use to find thermals in the atmosphere to climb to higher altitudes. AI agents will be designed, trained and tested to evaluate dynamic wind conditions, optimize flight profiles and perform soaring maneuvers.
DARPA intends to develop AI agents that will extend endurance by employing this bird-like soaring capability to reduce UAV onboard power usage and extend range and mission duration.
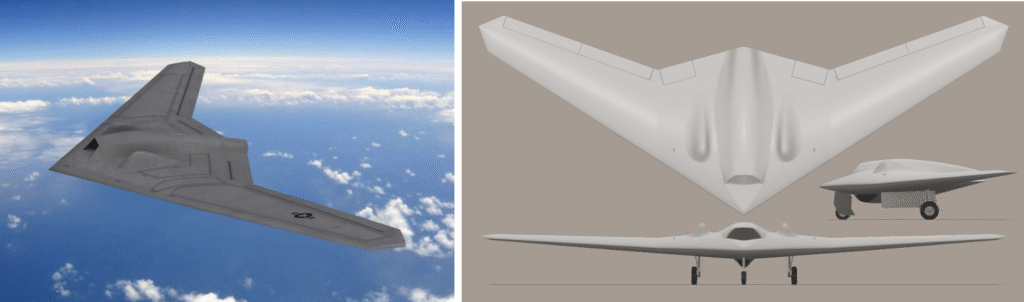
There is nothing new to report on the apparent drone crash Sept. 25, 2025, near the secretive base in Nevada, known as Area 51. The aircraft was attached to the 432nd Wing/432nd Air Expeditionary Wing at Creech Air Force Base in Nevada, about 57 miles southwest of the crash site. The 432nd operates MQ-9 Reaper drones, but the 33rd and 44th Reconnaissance Squadrons are also known to operate out of Creech and may operate RQ-170 Sentinel stealth drones.
RQ-170 Sentinel stealth drone thought to operate out of Cheech AFB Nevada (Photo: Lockheed Martin)
Famous (or infamous) for a 2023 reconnaissance operations in Iran, where one aircraft was apparently captured by the Iranians, the RQ-170 has been around since 2021.
The mystery surrounding the crash near Area-51 has grown somewhat since an inert training bomb and an aircraft panel were discovered at the crash site, but these items were not part of the damaged/destroyed crashed aircraft. In addition, the Air Force Office of Special Investigations (OSI) and the FBI have now been brought in to investigate. Enthusiasts who managed to get to the crash site recently found it cleaned completely, with no sign of spilt fuel or debris.
Troops in the field need information most — where the enemy is, their capabilities and what they’re doing.
One option: Launch a drone with video, infrared and radar, then use whichever works best depending on lighting, weather and whether the enemy jams signals. Better yet, call in a high-altitude surveillance drone like a GA-ASI Reaper that the enemy can’t see or hear. But that takes time, and one might not be available.
A new concept builds on an old precept — climb a tree and look at the opposition. But trees can be hard to find, difficult to climb and not high enough.
The answer to jamming and observational altitude: a tethered drone that a squad can carry. If the squad has a truck or Humvee, it can launch a tethered drone with no time limits because power comes up the tether with driving instructions while visual data goes back down. If necessary, move the ground vehicle closer and the drone moves with it.
Tethered drones serve any operation needing overview — rescue teams in disasters needing to see farther or a temporary communications hub, security operations searching for someone or something, monitoring or observing for infiltrators, initial surveys of difficult-to-access locations or military operations. Many other applications exist.
Most commercial and first-responder operations favor commercial or heavy-lift multirotor drones. Companies using multirotor drones include Hoverfly, Zenith, Fotokite, USaS, Advexure, Elistair, Kratos and Volarious.
If tethering drones to get really high, maybe use an aerostat that TCOM claims can operate from ground level to the stratosphere — pretty long tether needed! But applications also include anti-drone systems used to track and disrupt drone intruders.
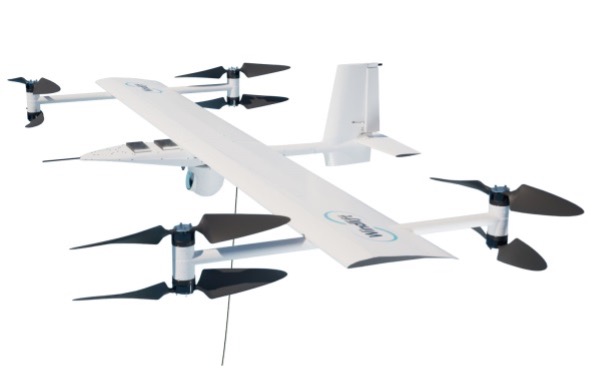
Then a more recent entrant is Windlift who uses a fixed wing multi-prop drone on the end of a very long tether to gain altitude and to operate in the sort of wind conditions that might be found at times in many locations world-wide, on land or at sea — very windy to gale force winds, actually up to 55mph. Now this is pretty tough for any tether system, but Windlift has a variable cross section tether which mitigates wind-resistance. And their special application is to fly in a figure of eight pattern at high altitude — to generate electricity.
Windlift surveillance drone (Photo: Windlift) Windlift power generator (Photo: Windlift)
This month brings a mixed bag of drone news, ranging from AI-driven “soaring” drones to an Area 51 drone crash mystery and an overview of tethered drones and their applications, including power generation. Who could have forecast these drone applications? Well, maybe the crashing part.
Geoinformation has evolved from a specialist tool to an essential resource for government, business and civilian use. Whether captured from space or drones, analyzed through artificial intelligence (AI) or 3D visualizations, geographic data now, more than ever, drives critical decisions across industries.
INTERGEO 2025 exemplifies this transformation. From Oct. 7-9, the Frankfurt Exhibition Center will host the world’s leading conference and trade show for geodesy, geoinformation and land management, featuring more than 500 international exhibitors ranging from innovative startups to industry giants.
Three-Day Conference Program Features 100 Sessions The INTERGEO Conference will present approximately 100 presentations and sessions over three days, drawing speakers from space agencies, United Nations organizations, government ministries and international technology companies.
Key topics include AI-powered remote sensing, urban digital twins, open data strategies, Earth observation for climate and crisis management and building information modeling (BIM) integration for infrastructure lifecycle management.
Keynote presentations such as “Earth Observation and Artificial Intelligence” and “Cartography for the Future” will provide forward-looking insights, while panel discussions on digital sovereignty and standardization will address strategic frameworks. Each session demonstrates how geoinformation serves as the critical foundation for climate adaptation, disaster preparedness, urban development and infrastructure protection.
Opening Day Features Space Technology Focus
DVW President Prof. Rudolf Staiger will open INTERGEO on Tuesday, Oct. 7, followed by a keynote from Johann Dietrich Wörner, space coordinator for the state of Hesse. His presentation, “Earth Observation and Artificial Intelligence,” will explore how AI transforms massive Earth observation datasets into actionable insights for climate, agriculture and urban planning projects.
Prof. Serena Coetzee of UNU-FLORES will deliver the German Cartography Congress keynote on Wednesday, Oct. 8, addressing cartography’s evolution amid growing geodata volumes and governance challenges.
Thursday morning’s panel discussion, “Digital Transformation – Perspectives, Trends and Theses,” will examine the need for reorienting geoinformation management to foster innovation and collaboration.
Revolutionizing Geospatial Data Analysis
AI is accelerating the transformation of raw data into actionable insights, fundamentally changing how professionals work with geoinformation. The session “AI-Based Analysis of Remote Sensing Data for Updating the ATKIS Basic DLM” demonstrates practical applications in public administration.
The Hessian Administration for Soil Management and Geoinformation uses AI methods to automatically detect landscape changes, significantly improving the quality and timeliness of digital landscape models.
Urban digital twins are rapidly advancing from static models to powerful operational platforms. The session “From Data to Insights: Visualization Technologies for Next-Generation Digital Twins” will showcase how modern visualization makes complex systems accessible and accelerates planning processes.
The research project “DigitalCities4Us” illustrates practical applications, using high-resolution 3D data to enable barrier-free urban planning and improve accessibility for people with mobility restrictions.
Additional sessions will examine implementation across administrative levels. “The Digital Twin NRW: A Practical Report” presents a statewide geospatial data infrastructure that is freely accessible and continuously developed. The city of Zurich will demonstrate its transition from traditional geospatial data infrastructures to multifunctional twin platforms.
Geodata infrastructures, open data and data spaces form the backbone of digital transformation and serve as key prerequisites for digital sovereignty. Multiple sessions will emphasize the importance of stable, future-ready geodata infrastructure.
Standardization receives particular attention through presentations like “Three Perspectives, One Goal: Digital Sovereignty through Open Standards in BIM and GIS” and the position paper “Official Geodata as a Basis for Digital Processes in Planning, Construction and Operation.” These sessions demonstrate how uniform standards for data exchange between geographic information systems and building information modeling can accelerate planning, construction and operational processes.
The position paper represents a joint initiative of buildingSMART Germany, the Working Committee of the Surveying Authorities and the Federal Association of Publicly Appointed Surveyors.
Critical infrastructures require precise, reliable data to minimize risks. The presentation “Regional and Effective Flood Protection in the State Capital of Düsseldorf” demonstrates how geoportals and flood forecasting tools prevent flooding and strengthen urban infrastructure resilience.
Bringing Innovation to the Exhibition Floor
Registration is now open at the INTERGEO website. The INTERGEO 2025 team looks forward to welcoming attendees to the Frankfurt Exhibition Center from Oct. 7-9.
Safran Electronics & Defense has unveiled Skydel AI, a breakthrough in GNSS simulation technology that uses artificial intelligence (AI) to automate and simplify simulation scenario setups.
Skydel AI streamlines GNSS simulation scenario creation through intelligent automation and an intuitive interface. Using natural language commands, Skydel AI allows users to query GNSS/Skydel topics, request assistance and dynamically configure simulation parameters by creating Python code for use by Skydel. The technology eliminates complexity and significantly reduces setup time.
“Soon available as part of Safran’s Support offerings, Skydel AI can help customers drastically improve their development cycles by accelerating manual scenario tuning and reducing long test cycles within Skydel,” said Pierre-Marie Leveel, program director for PNT at Safran. “Already established as the most flexible, robust, and accurate GNSS simulation engine, Skydel never stops innovating and delivering what the market requires – whether it is more realism, higher accuracy, more environment complexity, or ease of use.”
The company also introduced an AI-powered tropospheric model that enhances Skydel’s tropospheric simulation using real-time weather data and AI predictions to improve wet delay accuracy. Integrated with the Open-Meteo API and Skydel’s system, it relies on a neural network trained on 14 million samples from 221 GNSS stations, delivering up to 88% more accuracy. This model will be available in a future Skydel release.
The technical breakthrough reflects Safran Electronics & Defense’s commitment to redefining GNSS simulation with intelligent, adaptable and high-performance solutions for mission-critical applications.
Each day, millions of transportation decisions are made without a driver manually choosing a route or reacting to road signs. Trucks are rerouted around traffic hours before a jam appears. A vehicle slows down in a school zone, even without seeing a sign. A delivery service dynamically dispatches drivers based on weather and wait times.
These are not just conveniences; they are outcomes of location intelligence working behind the scenes, powered by artificial intelligence (AI) and real-time mapping.
At the heart of these systems lies a fundamental shift: maps are no longer static guides for humans. AI is unlocking a new era of computing and autonomous systems that will drive industry innovation and reinvention for years to come. Maps have become live, machine-readable software that enables automation at scale. Accenture’s Technology Vision 2025 report found large-language models (LLMs) are giving machines and robots more autonomy in the physical world, allowing them to better understand the physics of their environments, have spatial awareness, interact with people and understand complex instructions. This evolving autonomy is critical for autonomous vehicles, smart logistics and other systems that rely on real-time, AI-powered mapping to sense, decide and act.
Whether it’s advanced driver assistance systems (ADAS), predictive logistics, EV range optimization or smart city operations, AI-powered mapping is fast becoming the connective tissue between sensing, decision-making, and action. It all begins with location data that is collected, interpreted and delivered in real time.
From Navigation to Infrastructure: The Evolution of the Map
Throughout the past two decades, digital maps have evolved from a novelty to a necessity. The early wave of turn-by-turn GPS tools was designed for humans — to get us from one point to another using the shortest or fastest route.
Today, we are witnessing a new paradigm. As autonomy becomes embedded in vehicles, delivery operations, and mobile robotics, we need a new kind of map — one built for machines.
These maps must be able to see, react and even predict. They must be continuously updated with real-time inputs, capable of interpreting events and structured in a way that allows for automation logic. In other words, they must be intelligent; and that intelligence comes from AI.
AI-Powered Maps: What Makes Them Different?
A live, AI-powered map is far more than a digital representation of roads and intersections. It begins with a foundational base layer — detailed information about road geometry, lanes, speed limits, signage and more. However, what sets these maps apart is how they evolve in real-time to reflect the dynamic nature of the world around us.
They incorporate constantly changing inputs like traffic flow, construction activity, road closures and weather conditions — data streams that traditional static maps cannot accommodate. Beyond reacting to real-time events, AI maps also understand context. They may recognize nuances such as school zones that change by time of day, hazardous intersections, low-clearance bridges, and the availability or compatibility of EV chargers at nearby locations.
Crucially, AI-powered maps don’t just describe what’s happening – they anticipate what might happen next. Fueled by billions of data points collected from vehicles, sensors, satellite imagery and crowdsourced sources, these systems use predictive modeling to foresee traffic build-ups, potential hazards or shifts in road accessibility.
The result is a map that doesn’t merely guide but thinks — a constantly updating model of the world designed not for human eyes alone, but for machines that need to make decisions in real-time.
AI fuses these elements, constantly recalculating and enriching the map to reflect what’s happening now and what might happen next.
For this to work, mapping platforms must ingest the billions of data inputs. AI models then validate, filter and extract insight from this data — turning raw input into actionable intelligence and guidance.
Why AI Maps Matter in the Vehicle
Modern vehicles are increasingly defined by software, and that software needs a constant, reliable connection to the outside world.
ADAS features, such as intelligent speed assistance (ISA), lane keeping and predictive cruise control, depend not only on sensors like cameras or radar, but also on high-quality map data to anticipate what’s ahead.
For example, speed limit detection based solely on onboard vision can fail in poor weather or when signs are obscured. But when paired with verified, map-based data, continuously updated by AI, vehicles can make safer, more consistent decisions. As regulators in the EU and beyond mandate ISA systems in new vehicles, AI-enhanced maps are becoming a tool for regulatory compliance, not just convenience.
As OEMs continue their shift toward software-defined vehicles (SDVs), they increasingly treat maps as a core software module, critical to the operation of the vehicle itself, not just a navigation layer.
In the era of SDVs, maps are evolving into a foundational software service used not just to get somewhere, but to determine how and when it is safe to drive.
How AI Maps Support the EV Transition
One of the most significant barriers to widespread EV adoption is range anxiety: the fear that a driver won’t reach a charger in time, or that the charger will be in use or out of order. AI-powered maps help directly address this.
By combining real-time charger availability, plug compatibility, dynamic traffic conditions, topography, and vehicle battery status, intelligent routing systems can not only suggest optimal charging points, but also reroute on the fly as conditions change.
This level of intelligence is essential for EV fleet operators, especially those in logistics, ride-hailing or municipal transit.
AI-powered maps also leverage charger usage patterns, traffic flows and gaps in the network to help cities plan where to place new charging infrastructure.
In this way, location intelligence doesn’t just support EVs on the road but helps accelerate adoption.
Why AI Maps Matter in the Supply Chain
A HERE Technologies ‘On the Move’ survey found only 25% of transportation and logistics professionals are leveraging AI in supply chain management. Yet, the use cases for AI-powered mapping are plentiful.
Fleet operators face daily challenges: delays, emissions targets, labor shortages and delivery windows that shift by the hour. They’re actively seeking technology-based solutions. McKinsey projects the autonomous heavy-duty trucking market could reach an aggregated $616 billion in 2035 in China, the United States and Europe.
AI-powered maps help address many of these challenges. By combining real-time traffic information, road restrictions (e.g., weight limits, low bridges), and predictive analytics, intelligent maps help logistics operators optimize every mile.
For example, dynamic routing can avoid areas of congestion hours before they peak, based on machine learning models trained on historical and live data. AI can prioritize delivery orders based on customer availability, time-of-day restrictions or weather disruptions.
Beyond routing, maps also assist in asset tracking and risk management. Telematics systems that combine GNSS positioning with AI-based location intelligence can detect anomalies in driving behavior, flag out-of-route events and improve operational safety.
The results are evident and tangible: lower fuel consumption, reduced delivery times and higher fleet utilization.
GNSS and Geospatial Foundations
It’s important to underscore that these intelligent maps still depend on foundational technologies like GNSS. Without reliable satellite-based positioning, none of these applications (ADAS, EV routing or predictive logistics) would be possible.
But GNSS alone isn’t enough. Real-time location must be contextualized. An accurate lat/long fix is powerful, but the system needs to know: What road is that on? What’s the speed limit? Are there known hazards? What time of day is it? Is it raining?
This is where geospatial data, fused with AI and layered into live maps, becomes transformational. The future isn’t about replacing GNSS — it’s about expanding what’s possible when GNSS is augmented with AI, context and prediction.
Looking Ahead: Mapping as Mission-Critical Infrastructure
As autonomy increases across industries — from fully autonomous vehicles to self-driving delivery trucks to smart city systems — AI-powered maps will underpin critical operations.
AI-powered maps will be essential to the flow of goods, the safety of passengers and the predictability of city infrastructure. These systems must be continuously updated, machine-readable, context-aware, predictive and scalable. They also must be built with privacy, security and compatibility in mind. Governments, automotive manufacturers, technology providers and mapping platforms will need to collaborate — not just on data collection, but on standards, governance and interoperability.
Quiet Engine of Autonomy
We often focus on the visible outputs of automation: the driverless shuttle, the drone delivery, the smart traffic signal. However, none of these can function without a live map underneath, enabling every decision, in every moment.
Digital maps have become the quiet engine of autonomy. With the power of AI, they’re becoming smarter, faster and more essential every day.
For professionals in GNSS, geospatial intelligence, and positioning systems, this shift opens new territory where location isn’t just about where things are, but also about what’s happening, why it matters and what should happen next.
In this world, AI-powered maps are no longer a tool. They’re infrastructure.
VertiGIS has introduced VertiGIS Neo, a secure, cloud-based platform designed to improve sector-specific workflows through artificial intelligence (AI).
According to the company, VertiGIS Neo aims to accelerate business operations, streamline problem-solving and boost productivity by delivering modern web and mobile user experiences across its suite of solutions, including VertiGIS Studio, VertiGIS FM, VertiGIS Networks and VertiGIS ConnectMaster.
The platform incorporates embedded AI to drive innovation for both end users and application development teams. VertiGIS Neo enhances workflow processes in three key areas:
End-user assistants: AI-powered assistants and a low-code/no-code interface help users complete tasks more efficiently in web and mobile applications.
Application builder productivity: AI co-pilots enable administrators to configure and customize solutions with less effort.
Process transformation: AI capabilities fundamentally change how work is performed, from field operations to back-office tasks.
Flexible Cloud Deployments
VertiGIS Neo is built on a cloud-first infrastructure that supports fully managed, private, or hybrid cloud environments, offering operational flexibility, scalability and enhanced security. The platform supports rapid deployment within CI/CD pipelines and provides predictable pricing models for customers.
VertiGIS Neo offers three deployment options:
Cloud managed services: Complete cloud-based solution delivery, including data, infrastructure and applications.
Private cloud: Turnkey deployment into customer environments using prescribed hardware and containers.
Hybrid cloud: Multi-tenant and single-tenant SaaS applications accessing customer data within their environment.
Industry Solutions
VertiGIS Neo is designed to address business challenges across several sectors:
Utilities: Enables customers to model physical network infrastructure as digital twins and manage millions of service points, supporting the entire asset lifecycle from planning to decommissioning.
Telecommunications: Streamlines management of FTTx services and oversees both physical assets and logical circuits for communications providers.
Local Government: Helps build transparent, engaged and sustainable smart cities, improving engagement for both citizens and staff.
Enterprise: Integrates IoT and AI for real-time intelligence, remote sensing and asset tracking, fostering innovation in the private sector.
VertiGIS Neo’s features include dynamic attribute analysis with natural language queries, voice-to-prompt interfaces for map queries and automatic asset inspection and damage assessment using image recognition. The platform also allows users to create intelligent workflows from text prompts and automates the digitization of paper forms into digital records.
A new Esri book, GeoAI: Artificial Intelligence in GIS,provides real-life stories about public- and private-sector organizations as well as NGOs and nonprofits successfully using GeoAI (artificial intelligence) to manage processes, workflows, policies and communication. The book includes a technology showcase that provides ideas, strategies, tools and actions to help jump-start the use of GeoAI.
Organizations around the globe rely on geographic information system (GIS) technology to manage and analyze data through the powerful lens of location to tackle some of the toughest business and societal challenges. The emergence of AI-enhanced GIS has opened new opportunities to automate complex spatial analyses and harness the full power of spatial analysis.
This democratization of GIS can help everyone make better decisions faster, from city planners and policymakers to businesses, research groups, and constituents. In addition, organizations that already use GIS extensively will benefit from the ability to tackle complex problems by combining human GIS expertise with AI capabilities.
GeoAI: Artificial Intelligence in GIS, by Matt Artz, Ismael Chivite and Nicholas Giner, publishes Sept. 2, by Esri Press. While the book officially publishes on Sept. 2, Esri is printing it early so that it will be available at the Esri User Conference in San Diego July 14-18.
GeoAI: Artificial Intelligence in GIS Authors: Matt Artz, Ismael Chivite, and Nicholas Giner Publication Date: September 2, 2025 $39.00, 120 pages 5.5 x 8” Full-color illustrations, maps and photos throughout Print ISBN: 9781589488441 eISBN: 9781589488458
Artificial intelligence (AI) has become part of the daily lexicon, and an endless stream of media reports assert that AI either has affected or will affect most aspects of human life. What is AI and what are its components? How is it being used in GNSS technology? What is the near-term potential of AI in GNSS/PNT? These are weighty, evolving questions for which this column attempts an initial synthesis.
AI definitions and descriptions vary widely. One general and broad definition from IBM (2025) is “Artificial intelligence (AI) is technology that enables computers and machines to simulate human learning, comprehension, problem solving, decision-making, creativity and autonomy.” The idea of thinking machines (Turing, 1950) and the term “artificial intelligence” were introduced in the 1950s (McCarthy, 2007). The 1960s and 1970s saw the development of neural networks. The 1980s brought advances in neural network training and deep learning. The 1990s saw rapid advances in computing power. Big data and cloud computing developments in the 2000s allowed for the management and analysis of large datasets. The 2010s brought deep neural networks/deep learning, and the 2020s have seen the introduction and flourishing of large language models.
This column primarily focuses on the impacts that AI is directly having and could potentially have on GNSS hardware and PNT solutions, including receiver signal acquisition, measurement processing, position estimation, integrity and mitigation of jamming and spoofing. Due to space limitations, it will limit discussion to topics such as GNSS-based sensor fusion, navigation system routing, application-specific customizations, etc., all of which are undergoing significant AI-related infusions. A suitable guide to consider is the list of tasks for which evolving AI approaches can outperform existing methods in meaningful and efficient ways. For example, in error modeling or optimal estimation, can AI-based techniques fill gaps in non- or only partially-deterministic processes?
Essential
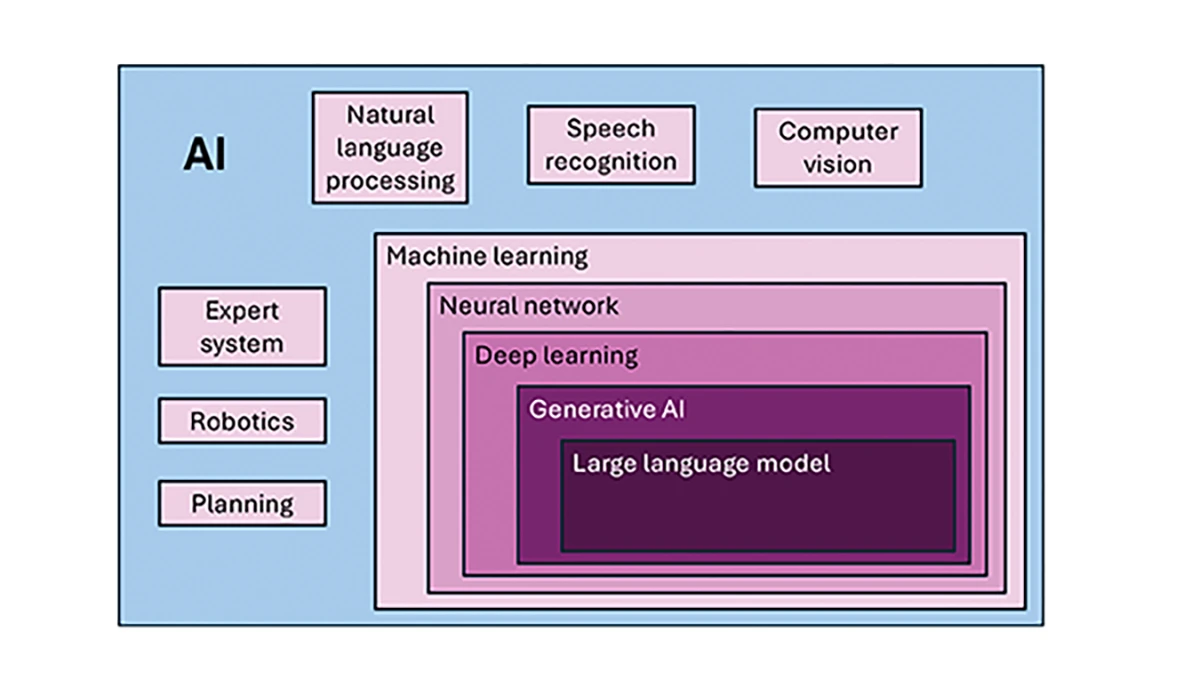
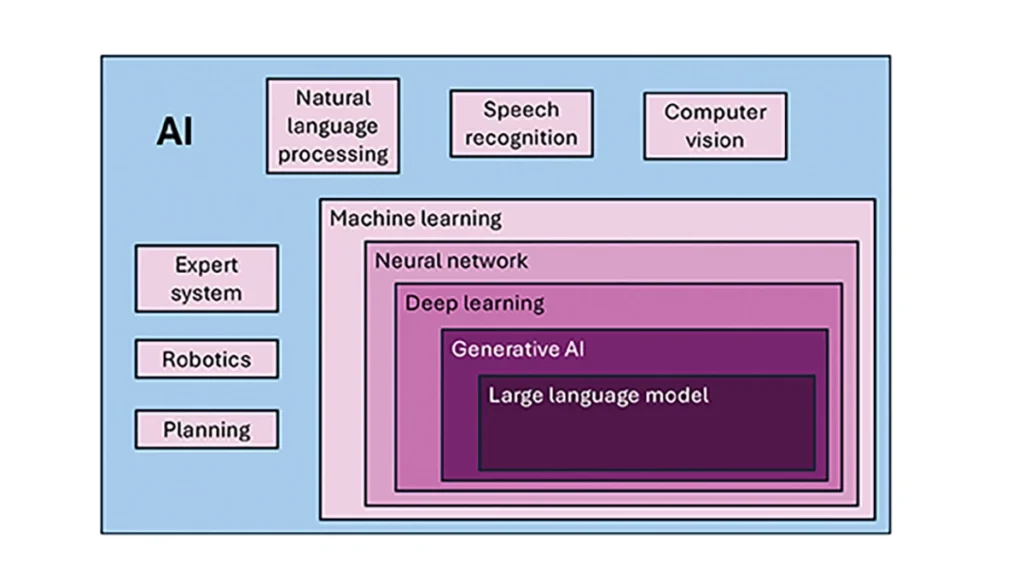
To investigate the current and potential uses of AI in GNSS, it is essential to define its components, especially as some terms are misused or conflated. The presented description is based on a wealth of Internet-based information, including from IBM (2025). Figure 1 illustrates the current broad concepts within, or subsets of, AI based on a synthesis of nomenclature used. In the figure, AI — defined here as a machine that exhibits human-like intelligence — is the superset. Within AI, there are many concepts or subsets that can be categorized, though they can overlap. There is perception intelligence, such as text and space recognition, and there is the broad area of machine learning.
Figure 1: Concepts within/subsets of AI.
Sophisticated processes have been developed and continue to rapidly evolve to give machines the ability to sense, learn and make decisions. Natural language processing (NLP) allows machines to recognize, understand and generate text following human language. Voice recognition is similar, in that the machine transcribes speech to text and back. Computer vision enables machines to interpret and analyze imagery. While robotics is a field of its own, within the superset of AI, it can be seen as an application of AI to motion. Planning refers to autonomously solving planning and scheduling problems. And expert system is the field of AI dedicated to simulating human expertise, judgment and behavior. All of these AI subsets are typically enhanced with machine learning (ML).
ML involves the development of algorithms and statistical models that can infer patterns (i.e., learn) from existing data without explicit instructions (i.e., rote training) and apply this knowledge to new data. Based on the learning approach, there are four types of machine learning algorithms: supervised, semi-supervised, unsupervised and reinforcement. (ML can also be classified by functionality.) Supervised learning uses manually labeled datasets to accurately train algorithms to classify data or predict outcomes. In semi-supervised learning and unsupervised learning, relationships are found with less or no explicit human interaction, respectively. Reinforcement learning combines these approaches with goal optimization. There are many types of ML techniques/algorithms, such as linear regression, logistic regression, decision trees, random forest, support vector machines, k-nearest neighbor and clustering, each designed for different types of problems and data.
Neural networks (NNs) or artificial neural networks are modeled after the human brain. A neural network model contains a given input layer and output layer, each with a set of nodes. These layers and nodes are interconnected with a set of hidden layers of nodes, with each node having a weight and bias, determined (i.e., estimated) based on the specified network inputs and outputs by utilizing one of a selection of optimization techniques. NNs can work well for tasks that involve identifying complex patterns and relationships given large amounts of data, though the details of specific parameter interrelationships cannot necessarily be determined by such models — therefore sometimes referred to as “black box” models. There are several types of neural networks, including convolutional NNs, long short-term memory networks, autoencoders, recurrent NNs, transformers, etc.
Deep learning refers to the depth of layers in a neural network. A deep learning model neural network contains at least three, but typically hundreds of hidden layers. Having many layers allows for unsupervised, fast and accurate identification of complex patterns and relationships. Generative AI can be described as deep learning models that generate new/original content, e.g., text, image or audio data through a variety of training, tuning and generation processes. Finally, large language models can read, understand and generate human language (refer to NLP), making use of all the functionality of ML.
Elements
How machine learning is used in GNSS
So, when should AI be used in GNSS/PNT tasks? A rudimentary answer is whenever AI can perform better (in some specified and measurable sense) than existing methods. The determination of this answer for a particular scenario requires research. From the descriptions of AI and its subsets, GNSS/PNT output is used in myriad AI applications such as sensor fusion, autonomous vehicle navigation, route planning, etc. However, it is primarily the ML subset of AI that is being researched for use in GNSS signal and measurement processing.
ML models can be categorized by their fundamental methodology, as either generative or discriminative, or by the tasks for which they are used: either regression or classification (IBM, 2025). Generative algorithms model the distribution of data points with the goal of predicting the joint probability of a data point appearing in a particular space, whereas discriminative algorithms model the boundaries between classes of data with the goal of predicting the conditional probability of a given data point being in a specific class. Regression models predict continuous values and are mainly used to determine the relationship between one or more independent variables and a dependent variable, whereas classification models predict discrete values and are mainly used to determine a category or class, e.g., binary or multi-class.
Siemuri et al. (2022) provide a comprehensive review of recent research (from 2020 through 2021) in which ML techniques are used in GNSS problem solving and provide a categorization of GNSS use cases. Relevant key findings include: 1) ML is proposed to increase GNSS/ PNT robustness under degraded signal environments; 2) more than 200 studies were assessed; 3) in most cases, the ML approaches outperformed (at varying levels of significance) the traditional GNSS models; and 4) industry adoption of ML in GNSS so far appears limited. The analysis found that neural networks were used in more than half of the studies (55%) — including some deep learning, while support vector machine and decision tree/random forest techniques were used in 19% and 10% of the studies, respectively. Use cases for machine learning in GNSS were categorized as: i) signal acquisition; ii) signal detection and classification; iii) Earth observation and monitoring; iv) navigation and positioning; v) denied environments and indoor navigation; vi) atmospheric effects; vii) spoofing and jamming; viii) GNSS/inertial integration; ix) satellite selection; and x) LEO satellite orbit determination and positioning.
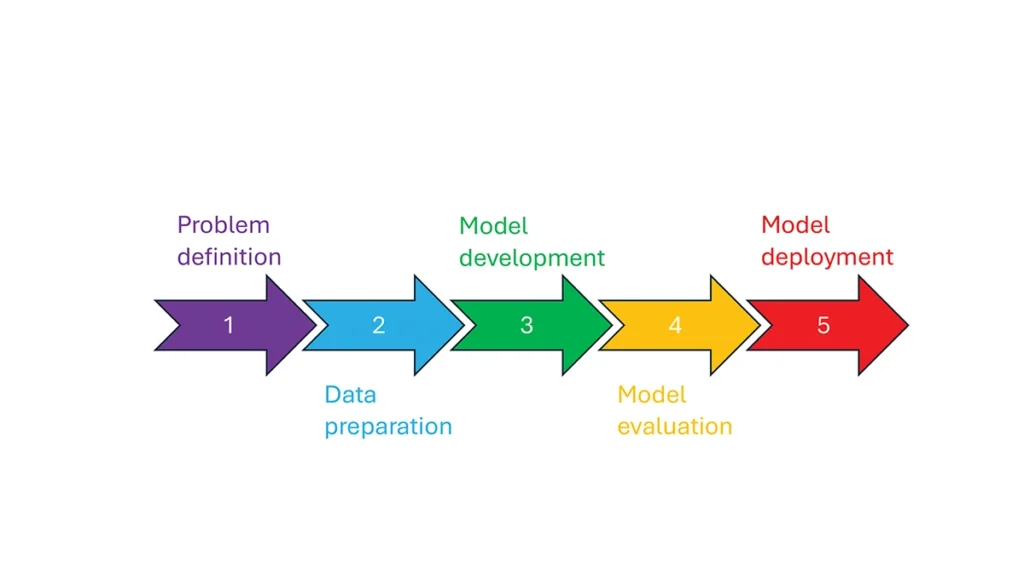
So, how is machine learning used in these GNSS/PNT use cases — and in general? How ML is applied can be described as a set of steps or a cycle with a varying number of components. Figure 2 presents a graphical synthesis from the literature, with a grouping of five core steps.
Step 1 — problem definition: understanding the problem(s) and goals, defining the available data, defining the problem inputs and outputs, determining the category of ML to use and selecting evaluation metrics.
Step 2 — data preparation: collecting the data, editing them, and labeling them if employing supervised classification.
Step 3 — model development: selecting the algorithm, selecting the model, building the model and training the model.
Step 4 — model evaluation: validating the model, tuning the model, analyzing the results, cross-validating the results and applying the evaluation metrics.
Step 5 — model deployment: finalizing the model, applying the model in prediction, and, if necessary, feeding back into the start of the cycle.
Figure 2 Steps in, or cycle of, machine learning implementation.
The scikit-learn (2025) library is a popular resource for Python-based ML information, tools and examples. An illustrative example of how ML can be used in GNSS for signal classification and measurement weighting is given by Li et al. (2023). The authors describe the process for designing the ML problem-solving scenario, selecting the models that are either of the regression or classification type and comparing the performance of many popular ML models to detect direct line-of-sight versus non-line-of-sight and multipath signals in urban environments. Note that most applications of machine learning in GNSS involve some form of supervised classification.
Initial and potential machine learning uses in GNSS
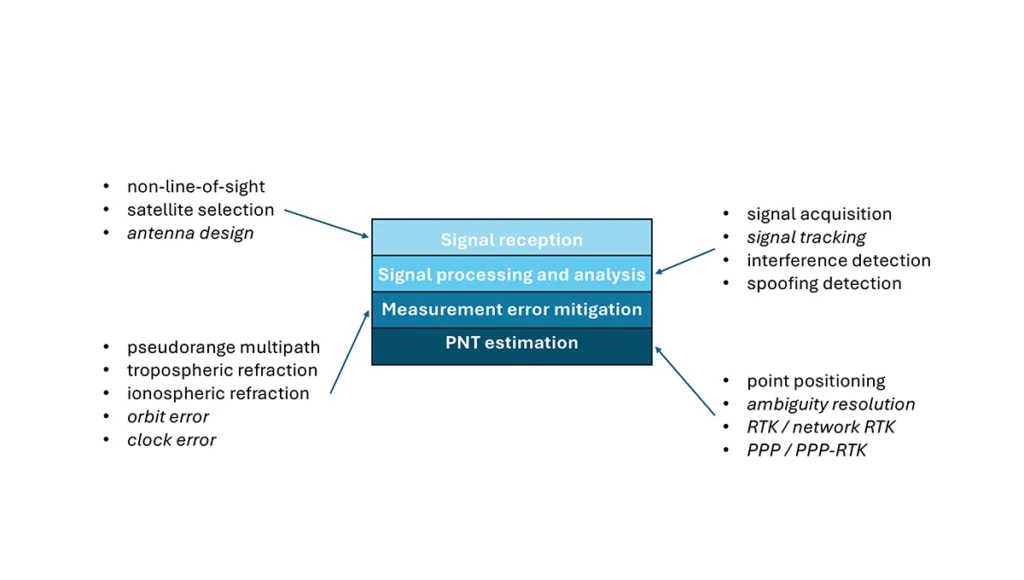
For this column, a brief synopsis is given of the use of machine learning in GNSS in the context of the application themes of signal reception, signal processing, measurement error mitigation and PNT estimation, as illustrated in Figure 3. Correspondingly, potential ML uses are also considered.
Figure 3: Application themes of machine learning in GNSS with initially studied and potential research areas.
Signal reception
Studies including Tsu (2017) and Li et al. (2023) have used various machine learning models to differentiate between line-of-sight, non-line-of-sight and pseudorange multipath GNSS signals in urban environments. Various input features, such as signal strength, are used to train models, resulting in majority accurate classification. ML has been used to optimize satellite selection (rather than using all available tracked satellites) for efficient PNT processing. Radio frequency hardware and software simulators can use ML to improve the realism of propagated signals in various environments and under different dynamics, including multipath, interference and spoofing. There is also the potential for ML to be used to improve antenna design, including for controlled radiation pattern antennas that generate one or multiple nulls.
Signal processing and analysis
Deep learning models have been used for signal acquisition and show improvement over current methods with simulated data (Borhani-Darian et al., 2023). There may be potential for the use of ML in signal tracking or in the design of new tracking algorithms and processes. Studies have shown that ML can be used to detect natural and intentional radio frequency interference. Various ML models have successfully been used to produce accurate classification of radio frequency interference jammer types (e.g., Morales Ferre et al., 2019). ML has also been used to detect signal spoofing with simulated and real signals with high levels of validation (e.g., Semanjski et al., 2020).
Measurement error mitigation
As GNSS multipath is a non-deterministic (and non-zero mean) process, it is a strong candidate for machine learning-based mitigation, especially meter-level pseudorange multipath (compared to centimeter-level carrier-phase multipath). Such studies, combined with non-line-of-sight classification, have been described in the previous section.
Initial investigations of the use of machine learning in the mitigation of tropospheric refraction appear promising (e.g., Łoś, et al., 2020). The wet tropospheric delay on GNSS signals is irregular, making it difficult to predict. Therefore, there is great potential for improved anomaly detection, refraction modeling and more accurate severe weather nowcasting.
As with tropospheric refraction, ionospheric refraction, while well understood, is difficult to model accurately, especially during periods of high solar activity. Machine learning has been shown to accurately detect anomalies and scintillation (e.g., Linty et al., 2018) and potentially for nowcasting.
There is the potential to improve GNSS satellite orbit and clock estimation with ML, as these are both well-defined processes, but also contain levels of process uncertainty. For example, it is usual to include once-per-orbital revolution empirical accelerations in orbit estimation states, and satellite force models can always be improved. Consequently, ML studies may aid in such GNSS network processing to improve the accuracy of real-time and post-processed correction products.
PNT estimation
Well-established optimal estimation techniques such as least-squares and Kalman filtering work extremely well for most GNSS/PNT estimation cases. However, hardware limitations and environmental conditions can lead to measurements not meeting the technical assumptions of these conventional approaches, e.g., the use of independent measurements, the absence of systematic errors, the absence of gross errors, the use of realistic measurement variances, etc. Deep learning models have the potential to improve GNSS point positioning (e.g., Kanhere et al., 2022) in test data, if poor model numerical conditioning, changing satellite visibility and model overfitting are managed. There is potential research in the use of machine learning methods to improve carrier-phase ambiguity resolution, and in the centimeter-level positioning techniques of real-time kinematic (RTK)/network RTK, and precise point positioning (PPP)/PPP-RTK.
Broader AI/ML use within GNSS-based PNT
Clearly, GNSS/PNT outputs are used in a broad spectrum of applications, for which AI and ML are currently being used or have the potential of being used to attain and enhance goals. Machine learning has been used to improve GNSS-derived position time series analysis for many Earth science applications, including in plate tectonics, tsunami monitoring, vulcanology, subsidence monitor, GNSS reference station monitoring, overall measurement integrity, etc. and in diverse GNSS-enabled techniques such as radio occultation and reflectometry (Siemuri et al., 2022).
ML has the potential to allow for improvements in sensor fusion, chief amongst these being GNSS/inertial measurement unit (IMU) integration. Improvements can be found in IMU calibration and in managing functional and dynamic mismodeling for specific user applications. Wider, multi-sensor fusion, such as for simultaneous location and mapping solutions, rely heavily on ML approaches, such as reinforcement learning.
Finally, GNSS-based PNT is used in most of the non-ML subsets of AI. GNSS-based position information is central to many outdoor robotics, planning and computer vision algorithms, providing either seeding localization information for other sensors or processes, or core position information for the overall AI-driven system.
Machine learning resource considerations
As with all technology, a cost/benefit analysis is required when considering the application of ML in a specific GNSS use case. Table 1 summarizes the broad considerations. Can the problem at hand be reliability mitigated with ML, in the sense that there are complexities that are difficult or impossible to physically model, but sufficient patterns in the data to be modeled by ML? If ML can outperform a conventional approach using specified metrics, is the improvement significant to the user? Are there large enough, i.e., sufficient and varied, datasets to train a model for prediction over expected data variations? As most ML algorithms require large amounts of computing storage for large datasets, typically from data servers, can the necessary computing power be brought to bear? Similarly, given that most ML algorithms require large amounts of computing power for myriad computational operations, typically utilizing graphics processing units (GPUs), is such computing power available? As storage servers for large datasets and GPUs for processing are expensive and require large amounts of electrical power, are the financial and electrical power, environmental and security resources available? And finally, how practical is it to implement the ML model on user equipment or via servers?
Table 1 Resource considerations for machine learning use in GNSS.
Evolutionary
AI is a broad field that is rapidly developing and entering service in most technologies. While AI includes many subsets such as computer vision, natural language processing and robotics, the ML subset (which includes neural networks, deep learning and generative AI) has the most direct applicability to GNSS/PNT. Of the available ML models used in GNSS, most are supervised (i.e., they use labeled training data), and the majority use neural networks. Initial studies of applications such as signal classification and interference detection indicate that supervised ML models perform better than traditional approaches.
Many subsets of AI, such as computer vision and robotics, rely heavily on ML, while GNSS/PNT has only recently seen investigations in ML use. For many applications, it can be that conventional deterministic models, physics-based models or optimal estimation techniques work well and reach desired performance standards. However, as GNSS/PNT continues to trend to lower cost hardware, harsher environmental conditions and increasing safety-of-life usage, PNT outliers and corner cases grow in importance, and ML can potentially provide solutions, as outlined in Figure 3. These are the early days of investigating and applying ML in GNSS/PNT. To use ML or not to use ML — that is the question. There are many factors to consider, as described in Table 1. Performance improvements over current approaches and operational practicality (i.e., costs) will dictate ML adoption. Much more research is required in many GNSS/PNT applications, followed by significant wide-spread testing and tuning of developed ML models. It is difficult not to predict the near-term adoption of ML in at least some GNSS/PNT use cases, if they will benefit our daily lives. Look for future columns that will examine and investigate ML implementations in specific GNSS/PNT applications that prove its efficacy.