CHC Navigation has released the C5 and C30 orthographic and oblique cameras for aerial surveys. The systems are designed to provide high-quality imaging solutions for photogrammetric applications and to complement lidar survey data.
The C5 camera is an efficient and lightweight system for aerial surveys, weighing 290 g for increased flight endurance. Its compact size of 75 mm x 63.5 mm x 102.5 mm allows easy integration into UAVs. The C30 camera’s weight is 600 g with a size of 110mm x 108 mm x 85 mm. The C30 is also designed for aerial surveying.
The C5 and C30 cameras’ universal installation design makes them compatible with a wide range of fixed-wing and rotor UAV platforms. Both cameras are supported by the CHCNAV’s BB4 Mini and P330 Pro UAVs as well as the DJI’s M300 RTK.
The Alphaport (the A-type hardware interface) enables the C5 and C30 to be easily mounted into various UAVs and converted into the DJI Skyport connector for extended compatibility.
The C5 and C30 cameras give maximum flexibility for photogrammetric applications. They can be used independently on real-time kinematic-enabled UAVs to capture high-resolution imagery or installed directly on the CHCNAV’s lidar series to colorize point cloud data. This feature allows seamless imagery and lidar data integration for a more complete view of the surveyed area.
GNSS researchers presented hundreds of papers at the 2022 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 19–23, 2022 in Denver, Colorado, and virtually. The following four papers focused on autonomous applications in transportation. The papers are available here.
Addressing integrity monitoring of autonomous navigation
There are critical issues for the integrity monitoring of autonomous navigation applications, which include an adequate uncertainty budget in the observation domain, redundancy for the determination of the navigational states, and the capability of fault detection and exclusion.
Several aspects are addressed in the paper, including how to: determine interval bounds to handle GNSS multipath effects in urban environments, realize fault detection and exclusion based on constraint satisfaction and set membership, and improve the detector using weighting models.
The authors of the paper aim to contribute to the alternative integrity approach based on interval and set representations for bounding and propagating system uncertainty. Simulated and real-world experiments are carried out to demonstrate the feasibility of the authors’ proposed methods.
The authors note that statistical evaluation of integrity will not always suffice due to the presence of remaining systematic uncertainty, but state the alternative integrity approach will contribute to future autonomous navigation applications.
Su, Jingyao; Schön, Steffen; “Advances in Deterministic Approaches for Bounding Uncertainty and Integrity Monitoring of Autonomous Navigation.”
Estimation and reference systems in automation
For a high level of automation, estimation is crucial, and to achieve a full and reliable navigation evaluation, a trustable reference system needs to be developed.
Although the presence of a reference system and of an inertial measurement unit with GNSS through the multi-sensor fusion scheme was integrated, in GNSS-denied or challenging environment the navigation solution could not be accurately estimated and still needs to be fixed.
The authors of the paper propose new strategies to better estimate the lidar-based position uncertainty and to update the reference system.
The first strategy proposed involves determining the appropriate position error covariance matrix, based on the Hessian matrix and the scale of covariance obtained from a normal distribution transform (NDT) scan matching technique and the geometric dilution of precision computed from the distribution of point cloud segments in each scan.
In the second strategy proposed in the paper, the updated reference system was post-processed according to the loosely coupled INS/GNSS/NDT integration scheme with a forward and backward smoothing process.
The results of the proposed strategies indicated that the updated reference system provides more reliable navigation estimation compared to an existing reference system from commercial software and can be used for accurate evaluation of positioning, navigation and timing with automated vehicle applications.
Srinara, Surachet; Chiu, Yu-Ting; “Adaptive Covariance Estimation of Lidar-Based Positioning Error for Multi-Sensor Fusion Scheme with Autonomous Vehicular Navigation System.”
Evaluating TerraStar-X
GNSS performance using typical, low-cost GNSS devices in vehicles is not enough to achieve the positioning and availability needed for lane-level accuracy on autonomous vehicles. The antenna and receiver hardware available in standard vehicles limits the position accuracy and convergence performance. These limitations make the positioning more susceptible to error sources such as receiver multipath, noise, carrier tracking and stability.
GNSS correction services with additional design considerations and sophisticated algorithms are needed to work within the constraints of automotive-grade GNSS devices to achieve the performance required for lane-level positioning.
TerraStar X technology from NovAtel enables these applications. It includes an orbit and clock determination system (OCDS), which produces a set of corrections, precise satellite orbits and clocks, and satellite-specific biases for individual signals augmented by the computation of additional regional corrections.
The authors of the paper outline the design and performance of the combined OCDS and regional correction system. They demonstrate the performance of the TerraStar X technology across a variety of applications.
The addition of regional corrections enables automotive and mass-market applications to achieve in-lane positioning in seconds, using any dual-frequency, dual-constellation GNSS hardware. The result is software that provides a continuous stream of multi-constellation, multi-frequency GNSS corrections — enabling a correction service that makes the affordable GNSS device ecosystem possible.
Regional corrections also improve the performance of survey-grade GNSS receivers.
Mervart, Leos; Lukes, Zdenek; Alves, Paul; “TerraStar X Technology: Design of GNSS Corrections for Instantaneous Lane-Level Accuracy on Large Scale Connected Vehicles and Devices.”
Solving the localization problem in autonomous driving
The localization problem in autonomous driving imposes two criteria on the navigation solution: accuracy and reliability or integrity. According to the authors of this paper, solving the localization problem is a key requirement to enabling the development of autonomous platforms.
This paper presents AUTO, a real-time integrated navigation system that tightly integrates INS, GNSS-RTK, odometer, and multiple radars sensors with high-definition maps to achieve a high-rate, accurate, continuous, and reliable navigation solution. It also shows how AUTO leverages a tight integration of imaging radars with other traditional sensors to provide a robust navigation solution with corresponding estimates of the uncertainty.
The AUTO solution was tested in a variety of environments and locations, including a range of conditions such as winter weather, to assure the robustness and reliability required by autonomous applications.
The results demonstrate the lane level accuracy of the solution in a variety of challenging urban and downtown environments. Additionally, the tight integration enables the determination of protection levels to describe upper bounds on the uncertainty.
The results in the paper are illustrated using a Stanford Diagram, along with a user-defined alert limit to describe the solution integrity and availability. The proposed algorithm uses a map matching technique between the imaging radar data and a globally referenced high-definition map to better estimate the solution uncertainty and protection levels.
AUTO’s tightly integrated approach to integrity monitoring means uncertainties and protection levels can be determined even in areas where the system may experience extended periods of GNSS unavailability.
Krupity, Dylan; Chan, Billy; Ali, Abdelrahman; Salib, Abanob; Georgy, Jacques; Goodall, Christopher; “Integrity Monitoring and Uncertainty Estimation with AUTO’s Non-linear Integration of Multiple Imaging Radars and INS/GNSS for Autonomous Vehicles and Robots.”
Leica Geosystems, part of Hexagon, has released the Leica CountryMapper for large-area imaging and lidar mapping. Combining a large-format photogrammetric camera with a high-performance lidar unit into a single system, the CountryMapper collects foundational geospatial data simultaneously to support a wide variety of user applications.
The CountryMapper combines imaging and lidar sensor modules into a highly efficient hybrid airborne system. The sensor features CMOS-based Leica MFC150 camera modules that leverage true mechanical forward-motion-compensation to deliver high image quality.
The sensor’s new Hyperion3 lidar unit features 60° field of view, improving the performance and flexibility of the system compared to previous lidar modules, while reduced laser divergence provides greater planimetric accuracy and better foliage penetration. The CountryMapper fully integrates with Leica HxMap multi-sensor end-to-end processing workflow, enabling distributed processing of images and point clouds to optimize productivity for very large data sets.
The CountryMapper supports applications such as orthophoto generation, terrain mapping, hydrography, forestry monitoring and infrastructure management. Users of previous-generation sensors can leverage their initial investment and upgrade their systems to the CountryMapper configuration.
Tallysman’s custom XF filtering has been tested to mitigate new (Europe and Japan) and existing LTE signals, enabling the XF antennas to produce clean and pure GNSS radio frequency data.
Image: Tallysman Wireless
The TW7972XF surface mount Accutenna antenna has a metal base and robust IP67 military-grade radome. Attachment methods include screws, adhesive tape, and magnet mount.
Many antenna connectors and cable options are available.
The Safran Navigation & Timing critical infrastructure solution, White Rabbit, has received high praise in a report published by the European Commission (EC) Joint Research Center (JRC) that evaluates the effectiveness of alternative positioning, navigation and timing (APNT) platforms.
For more than eight months, the commission studied a variety of available solutions to assess the performance of APNT demonstration platforms in a variety of situations where there is signal loss, and a backup system is necessary. The selected solutions were evaluated for precise and robust timing and positioning services in challenging indoor and outdoor environments.
Safran’s White Rabbit is a high-accuracy time and frequency distribution protocol, which combines precise time protocol (PTP) packets with the frequency base of Synchronous Ethernet (SyncE) to provide sub-nanosecond time transfer accuracy over an optical fiber. While the results of the test campaign showed that all APNT platforms under evaluation demonstrated performances in compliance with the requirements set, White Rabbit excelled in its performance.
Safran demonstrated White Rabbit’s ultra-accurate time transfer over fiber optics, its high-performance time generation, resiliency (based on failover and holdover), interoperability, and user-friendly monitoring capabilities.
As stated in the report, Safran demonstrated, “the ability to handle multiple master clock inputs with voting and seamless switchovers. Interconnecting as many NMIs as possible, with possible local atomic clock backups, would result in a very robust and resilient time architecture, independent from GNSS across Europe. The ability to provide resilient and accurate time through the EU communication infrastructure, ideally on the nanosecond level, would also enable robust positioning, using a combination of signals.”
The European Union Agency for the Space Programme (EUSPA) has announced that as of June 1, the latest European Geostationary Navigation Overlay Service (EGNOS) payload is operational ahead of the first V3 test signals.
Launched onboard the EUTELSAT Hotbird 13G satellite in November 2022, the payload underwent a rigorous testing phase before entering service. It is expected to have a 15-year life span.
EGNOS V3 will augment both GPS and Galileo in the L1 and L5 bands. It is also set to provide additional satellite-based augmentation system (SBAS) service capabilities through a new SBAS channel on L5 and will deliver increased EGNOS service availability within and beyond the EU, supporting a growing number of users.
Aviation has benefitted greatly from the EGNOS safety of life service. This has enabled better access to small and regional airports, increased safety, and facilitated more sustainable flight routes across Europe. Other industries, such as maritime and rail, also benefit from the EGNOS safety of life service.
In addition, with its Open Service, EGNOS increases the positioning accuracy for other land-based applications including precision farming, geomatics and land management.
About EGNOS
EGNOS is Europe’s regional SBAS. It is used to improve the performance of GPS and will augment Galileo from 2025 onwards. EGNOS was deployed to provide safety of life navigation services to aviation, maritime and land-based users.
The information provided by EGNOS improves the accuracy and reliability of GNSS positioning information while also providing a crucial integrity message. In addition, EGNOS also transmits an accurate time signal.
Hexagon│NovAtel’s OEM7 GNSS receivers have successfully tracked Xona Space Systems PULSAR signals generated by a simulator from Spirent Communications. This test proved NovAtel GNSS receivers can track a Spirent simulated L-band signal identical to the PULSAR signal broadcast by Xona’s low-Earth orbit (LEO) satellites.
The Xona LEO signals will complement GNSS, improving resiliency, security, and precision for positioning, navigation and timing (PNT).
“Using Spirent’s simulated PULSAR signal, we have successfully tested our receiver’s capability to track the L-band signal planned to be broadcast from Xona’s LEO satellites,” Sandy Kennedy, VP of innovation at Hexagon’s Autonomy and Positioning division, said. “The OEM7 is a powerful platform, designed for both resiliency and flexibility; it is exciting to test our forethought by trialing this new signal type.”
The Japan Civil Aviation Bureau (JCAB) has granted Skydio nationwide approval to remotely fly UAVs beyond visual line of sight (BVLOS). The approval enables streamlined BVLOS operations using Skydio Dock and Remote Ops.
Skydio’s artificial intelligence and autonomous technology enables UAVs to safely fly missions near structures in a way that would be difficult or impossible with manually-operated UAVs — even when operated remotely without a pilot on-site.
Under the JCAB approval, there is no requirement to use additional crew members, such as visual observers, or technology to detect crewed aircraft — eliminating some of the challenges faced by UAV operators. The BVLOS approval applies across Japan.
Notification of the flight area is required prior to takeoff using JCAB’s web portal. Operators can now remotely inspect critical infrastructure — buildings, roads, power plants and the scenes of natural disasters — safely and quickly without placing people at risk.
Trimble has released the X9 3D laser scanning system — a versatile reality capture solution suitable for surveying, construction and engineering users. The X9 is designed to enhance performance in more environments while leveraging Trimble’s X-Drive technology for automatic instrument calibration, survey-grade self-leveling and laser pointer for georeferencing.
The X9 expands on Trimble’s X7, delivering longer range, higher accuracy, shorter scan times and sensitivity, improving scan results. Advanced processing and a high-performance laser increase the sensitivity of all scans, enabling the X9 to capture difficult dark or reflective surfaces. A new center unit design also improves signal transmission for better scan quality.
The X9 provides accurate and dependable data, enabling confident decision making both in the field and in the office through in-field registration with Trimble Perspective and FieldLink software by minimizing the need for target deployment. The auto-calibration eliminates the need for annual calibration.
In addition, the X9 includes survey-grade self-leveling with the industry’s widest compensation range for fast, easy setup.
The X9 data can be delivered directly from the Perspective or FieldLink software to Trimble’s office software — including the Realworks 3D scanning software — business center office software, SketchUp and Tekla, or exported to industry-standard formats to produce application-specific deliverables.
TuSimple Holdings, a global autonomous driving technology company, has started Level 4 autonomous test runs on the freight corridor that connects the major cities of Tokyo, Nagoya and Osaka.
In 2021, TuSimple Japan, a subsidiary of TuSimple, completed a series of safety validation and testing work of its autonomous driving system with a truck provided by a Japanese OEM. In January, TuSimple Japan commenced regular testing on the Tomei Expressway.
It has been reported that the Japanese government is planning to launch a self-driving lane on some sections of the new Tomei Expressway by 2024 and will allow commercial operation of SAE Level 4 fully autonomous trucks in 2026.
TuSimple is developing a commercial-ready, fully autonomous (SAE Level 4) driving solution for long-haul, heavy-duty trucks. As of March 2023, TuSimple trucks have recorded more than 10 million cumulative miles through testing, research, and freight delivery.
Tallysman Wireless and u-blox have partnered to develop PointPerfect precise point positioning real-time kinematic augmented smart antennas.
The ZED-F9R high precision GNSS and the NEO-D9S L-band receivers from u-blox have been integrated with Tallysman’s technology. The product integration will provide accuracy and precision.
The multi-band (L1/L2 or L1/L5) architecture removes ionospheric errors, and the multi-stage enhanced XF filtering improves noise immunity while relying on the dual-feed Tallysman Accutenna element to mitigate multi-path signal interference rejection. Some versions of the new smart antenna solutions include an inertial measurement unit (dead reckoning) and an integrated L-band corrections receiver to ensure operation beyond terrestrial network reach.
The PointPerfect GNSS augmentation service is now available in North America, Europe and parts of Asia Pacific.
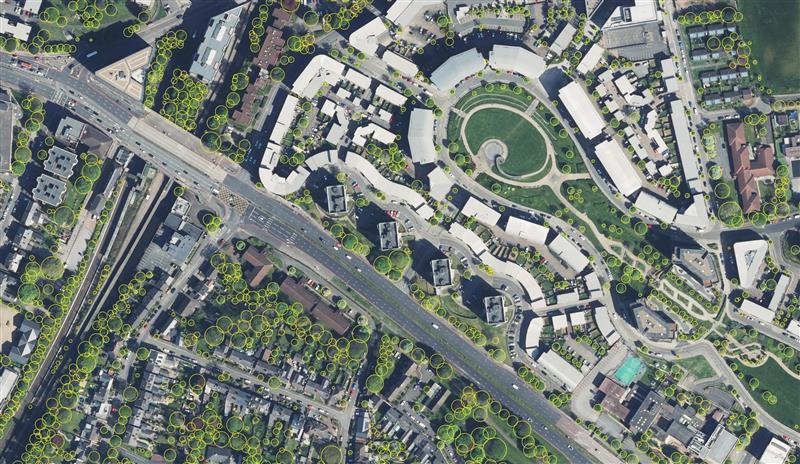
Birmingham City Council has launched a mapping portal to address the issue of tree equity across the city.
With UK national tree map data, created by aerial mapping company Bluesky International, the interactive tool allows users to identify which parts of the city have lower than average tree canopy cover and investigate possible relationships between canopy cover and other socio-economic and environmental factors. The online platform also enables users to model different scenarios and targets to identify planting opportunities and locations to increase the number of trees.
The national tree map was created using innovative algorithms and image processing techniques, from the most up-to-date aerial photography and terrain data for the whole of Great Britain and Ireland. It provides a detailed reference as to the location, canopy cover and height of trees 3 m and taller that can be applied alongside other data to establish ownership, proximity to other features or assets, and relationships between demographic, economic or social data.
National tree map data is widely used by a number of different market sectors such as local authorities, energy companies, property developers and academic and research organizations, investigating the role of trees and green spaces and their impact on health, environment and infrastructure.