Xona Space Systems has partnered with the Air Force Research Laboratory (AFRL) and the U.S. Space Force under a $1.2 million Direct to Phase II SBIR (Small Business Innovation Research) contract to work toward a secure low Earth orbit (LEO) positioning, navigation and timing (PNT) constellation leveraging Xona’s PULSAR service.
The contract was awarded through an AFWERX SBIR Open Topic, after Xona demonstrated its LEO PNT technology using the “Huginn” demo satellite in late 2022.
Xona is developing PULSAR – a high-performance PNT service enabled by a commercial constellation of dedicated LEO satellites.
The PULSAR service aims to advance PNT security, resilience and accuracy capabilities by augmenting existing GNSS while also operating as an independent PNT constellation.
“Our partnership with the AFRL Space Vehicles directorate and USSF’s Space Warfighting Analysis Center will give Xona the expertise necessary to seamlessly integrate PULSAR into the U.S. national security space architecture,” said Brian Manning, CEO, Xona Space Systems. “Early assessment of unique DOD PNT requirements will set us up for a successful transition to operational service.”
Colonel Jeremy Raley, commander of the Phillips Research Site and director of the AFRL Space Vehicles Directorate, said the investment will contribute to force design analytics that consider contributing signals from multiple orbit regimes.
“Lessons from this effort will pave the way for future defense programs to successfully utilize commercial space assets for flexible and diverse satnav that is resilient to the adversarial threat,” Raley said.
Preceding the award, Xona became the first company to launch a privately funded PNT mission progressing from concept to on-orbit in less than 12 months. Since then, Xona has partnered with major companies such as Hexagon | NovAtel, Septentrio, Spirent, Safran, and StarNav. In April 2023, the company moved into its new headquarters in Burlingame, California, where the company plans to start the production of PULSAR satellites.
In May the President’s PNT Advisory Board heard a presentation about a National Guard project called NITRO. RNT Foundation President, Dana Goward, recently spoke with the project’s leader, Maj. Gen. Richard R. Neely, Adjutant General, Illinois National Guard, to find out more.
Mr. Goward: Thanks for speaking with us, General. Could you start by telling us what NITRO is and why it’s important?
Maj. Gen. Neely: Of course. NITRO is a project to ensure that the National Guard and our state’s first-responder partners can maintain communications and other critical functions even if we lose GPS timing signals.
NITRO is an acronym for Nationwide Integration of Timing Resiliency for Operations. ]You know how we in the military love our acronyms.
Telecoms and most of the rest of America’s critical infrastructure are dependent on timing from GPS. However, GPS signals are weak, highly vulnerable and under threat.
In addition to bad actors who can and do jam and spoof signals, accidental interference happens all the time. Operations at the Dallas and Denver airports were each interrupted by accident for more than a day last year, for example. A couple of years ago, a passenger airliner almost hit a mountain because of interference with GPS.
Q: It sounds like this is a safety of life issue.
A: It is. Right now, if we lost GPS signals and had to respond to a domestic attack, natural disaster, or other contingency, I am confident there would be additional unnecessary casualties. We are building NITRO so that we can save those lives and keep America safe.
Q: So how does NITRO work?
A: In addition to GPS, it gets multiple sources of space-based and terrestrial time from government and commercial providers. NITRO can use any trusted source. It is not provider- or vendor-specific.
Inputs are combined and compared, matched to the nation’s atomic clocks keeping Coordinated Universal Time, and users are sent the best accurate time multiple ways including over fiber, terrestrial broadcast, and resilient wireless networks.
Another great way in which I think it will be useful: NITRO gives us a common operating picture that can help detect and terminate GPS disruptions and anomalies around the country.
Q: Is the National Guard the only user?
A: Absolutely not! This is a state/federal partnership. The states’ Adjutant Generals are working with their Homeland Security Advisors to make it available to state, local, and tribal first responders. In some instances, also to critical infrastructure.
Even though we are in the early stages of implementation, NITRO is being used by seven states and 256 organizations and it is protecting more than 33 million people, including citizens here in Illinois.
Q: Is NITRO a tasking from the President or Congress? Who told you to do this?
A: NITRO helps execute long standing presidential policy and orders, as well as the recently released National Cybersecurity Implementation Plan. It also meets congressional mandates for backups and alternatives to GPS timing.
However, we created NITRO because we identified a serious threat to the National Guard’s mission execution. It closes 11 operational gaps for us, all without changes to end-user equipment.
Q: With what groups are the NITRO team working?
A: All the states are involved through their adjutant generals, homeland security advisors, and emergency managers. The NITRO board I chair is made up of the adjutant generals from six states.
We are also coordinating across the federal government, especially with the Departments of Homeland Security, Transportation, Commerce, and Energy.
As part of this we are partnering with the Department of Transportation to establish a NITRO engineering and operational site at Joint Base Cape Cod. This will allow engineers from different organizations to see more easily what we are doing and contribute their expertise.
Q: NITRO is going to provide timing signals in places and at times when GPS is not available. Won’t the National Guard also need navigation information?
A: Positioning and navigation are very important, but not quite as critical as timing. So, we are addressing that problem first. And since wireless location and navigation are often based on timing signals, NITRO will provide a good foundation for services and systems that can augment GPS-based navigation.
Q: So, how is the project going?
A: From a technical and operational standpoint, it’s going great. We have very high satisfaction ratings from NITRO users, and states are eager to be connected as soon as possible.
The technologies used are all mature, reasonably low cost, and most components are commercially available. So, engineering-wise it is low risk.
And our team is doing a great job helping folks move from full dependency on GPS to resilient positioning, navigation and timing (PNT) operations.
Q: Do you have any concerns going forward to full deployment?
A: The only thing I worry about is continued funding. Over the next five years we need something less than the cost of one GPS satellite. You would think that would be easy to find for an important effort like this, but it is a state/federal partnership, not a Department of Defense project. So, it falls into a kind of bureaucratic and budgetary no man’s land.
Q: What’s the solution for funding?
A: That’s not our call. The folks at the White House are exploring several alternatives, and I know several members of Congress are also concerned. We see a possibility of this fitting nicely with the recent infrastructure funding bill.
Q: It sounds like NITRO is something America really needs. Let’s hope they find a solution to the funding challenge, and quickly, to keep you on track. Thank you very much for your time!
Figure 1: Diagram of cis-lunar space, which includes the real GPS sidelobe data collected on an HEO space vehicle. (All figures provided by the authors)
As part of NASA’s increased interest in returning to the moon, the ability to acquire accurate, onboard navigation solutions will be indispensable for autonomous operations in cis-lunar space (see Figure 1). Artemis I recently made its weeks-long journey to the Moon, and spacecraft carrying components of the Lunar Gateway and Human Landing System are planned to follow suit. During launch and within the GNSS space service volume, space vehicles can depend on the robust navigation signals transmitted by GNSS constellations (GPS, GLONASS, BeiDou, and Galileo). However, beyond this region, NASA’s Deep Space Network (DSN) serves as the system to track and guide lunar spacecraft through the dark regions of cis-lunar space. Increasingly, development of a lunar navigation satellite system (LNSS) that relies on a low size, weight and power (SWaP) “smallSat” constellation is being discussed for various possible orbits such as low lunar orbit (LLO), near rectilinear halo orbit (NRHO) and elliptical frozen orbit (ELFO).
Figure 2: DPE 3D (left) and 2D (right) spatial correlogram shown on a 3D north-east grid.
We have implemented direct positioning estimation (or collective detection) techniques to make the most of the limited and weak GPS signals (see Figure 2) that have been employed in other GNSS-degraded environments such as urban canyons. The algorithm used in conventional GNSS positioning employs a two-step method. In the first step, the receiver acquires signals to get a coarse estimate of the received signal’s phase offset. In the second step, the receiver tracks the signals using a delay lock loop coupled with a phase or frequency lock loop. The second step enables the receiver to get fine measurements, ultimately used to obtain a navigation solution. In the scenario addressed in our work, where a vehicle is navigating beyond the GPS satellite constellation, the signals are weak and sparse, and a conventional GPS receiver may not be able to acquire or maintain a lock on a satellite’s sidelobe signals to form a position solution. For a well-parameterized region of interest (that is, having a priori knowledge of the vehicle orbital state through dynamic filtering), and if the user’s clock error is known within a microsecond, a direct positioning estimator (DPE) can be used to improve acquisition sensitivity and obtain better position solutions. DPE works by incorporating code/carrier tracking loops and navigation solutions into a single step. It uses a priori information about the GPS satellites, user location, and clocks to directly estimate a position solution from the received signal. The delay-Doppler correlograms are first computed individually for the satellites and are then mapped onto a grid of possible candidate locations to produce a multi-dimensional spatial correlogram. By combining all signals using a cost function to determine the spatial location with the most correlation between satellites, the user position can be determined. As mentioned, signals received beyond the constellation will be sparse and weak, which makes DPE a desirable positioning method.
BACKGROUND
The proposed techniques draw from several studies exploring the use of weak signals and provide a groundwork for developing robust direct positioning methods for navigating beyond the constellation. NASA has supported and conducted several of the studies in developing further research into the use of signals in this space.
A study done by Kar-Ming Cheung and his colleagues at the Jet Propulsion Laboratory propagates the orbits of satellites in GPS, Galileo, and GLONASS constellations, and simulates the “weak GPS” real-time positioning and timing performances at lunar distance. The authors simulated an NRHO lunar vehicle based on the assumption that the lunar vehicle is in view of a GNSS satellite as long as it falls within the 40-degree beamwidth of the satellite’s antenna. The authors also simulate the 3D positioning performance as a function of the satellites’ ephemeris and pseudorange errors. Preliminary results showed that the lunar vehicle can see five to 13 satellites and achieve a 3D positioning error (one-sigma) of 200 to 300 meters based on reasonable ephemeris and pseudorange error assumptions. The authors also considered using relative positioning to mitigate the GNSS satellites’ ephemeris biases. Our work differs from this study in several key ways, including using real data collected beyond the GNSS constellations and investigating the method of direct positioning estimation for sparse signals.
Luke Winternitz and colleagues at the Goddard Space Flight Center described and predicted the performance of a conceptual autonomous GPS-based navigation system for NASA’s planned Lunar Gateway. The system was based on the flight-proven Magnetospheric Multiscale (MMS) GPS navigation system augmented with an Earth-pointed high-gain antenna, and optionally, an atomic clock. The authors used high-fidelity simulations calibrated against MMS flight data, making use of GPS transmitter patterns from the GPS Antenna Characterization Experiment project to predict the system’s performance in the Gateway NRHO. The results indicated that GPS can provide an autonomous, real-time navigation capability with comparable, or superior, performance to a ground-based DSN approach using eight hours of tracking data per day.
In direct positioning or collective detection research, Penina Axelrad and her colleagues at the University of Colorado at Boulder and the Charles Stark Draper Laboratory explored the use of GPS for autonomous orbit determination in geostationary orbit (GEO). They developed a novel approach for directly detecting and estimating the position of a GEO satellite using a very short duration GPS observation period that had been presented and demonstrated using a hardware simulator, radio-frequency sampling receiver, and MATLAB processing.
Ultimately, these studies and more have directed our research in exploring novel methods for navigating beyond the constellation space.
DATA COLLECTION
The data we used was collected as part of the U.S. Air Force Academy-sponsored Falcon Gold experiment and the data was also post-processed by analysts from the Aerospace Corporation. A few of the key notions behind the design of the experiment was to place an emphasis on off-the-shelf hardware components. The antenna used on board the spacecraft was a 2-inch patch antenna and the power source was a group of 30 NiMH batteries. To save power, the spacecraft collected 40-millisecond snapshots of data and only took data every five minutes. The GPS L1 frequency was down-converted to a 308.88 kHz intermediate frequency and was sampled at a low rate of 2 MHz (below the Nyquist rate) and the samples were only 1- bit wide. Again, the processing was designed to minimize power requirements.
METHODS AND SIMULATIONS
To test our techniques, we used real data collected from the Falcon Gold experiment on a launch vehicle upper stage (we’ll call it the Falcon Gold satellite) which collected data above the constellation on a HEO orbit. The data collected was sparse, and the signals were weak. However, the correlation process has shown that the collected data contained satellite pseudorandom noise codes (PRNs). Through preliminary investigation, we find that the acquired Doppler frequency offset matches the predicted orbit of the satellite when propagated forward from an initial state. The predicted orbit of the satellite was derived from the orbital parameters estimated using a batch least-squares fit of range-rate measurements using Aerospace Corporation’s TRACE orbit-determination software. The propagation method uses a Dormand-Prince eighth-order integration method with a 70-degree, first-order spherical harmonic gravity model and accounting for the gravitation of the Moon and Sun. The specifics of this investigation are detailed below.
Figure 3: GPS constellation “birdcage” (grey tracks), with regions of visibility near the GPS antenna boresight in blue and green for the given line-of-sight from the Falcon Gold satellite along its orbit (orange).
The positions of the GPS satellites are calculated using broadcast messages (combined into so-called BRDC files) and International GNSS Service (IGS) precise orbit data products (SP3 files). GPS satellites broadcast signals containing their orbit details and timing information with respect to an atomic clock. Legacy GPS signals broadcast messages contain 15 ephemeris parameters, with new parameters provided every two hours. The IGS supports a global network of more than 500 ground stations, whose data is used to precisely determine the orbit (position and velocity in an Earth-based coordinate system) and clock corrections for each GNSS satellite. These satellite positions, along with the one calculated for the Falcon Gold satellite, allowed for the simulation of visibility conditions. In other words, by determining points along the Falcon Gold satellite trajectory, we determine whether the vehicle will be within the 50° beamwidth of a GPS satellite that is not blocked by Earth.
Figure 3 shows a plot rendering of the visibility conditions of the Falcon Gold satellite at a location along its orbit to the GPS satellite tracks. Figure 4 depicts three of the 12 segments where signals were detected and compares the predicted visibility to the satellites that were actually detected. A GPS satellite is predicted to be visible to the Falcon Gold satellite if the direct line-of-sight (DLOS) is not occluded by Earth and if the DLOS is within 25° of the GPS antenna boresight (see Figure 5).
Figure 4: Predicted visibility of direct line-of-sight to each GPS satellite where a blue line indicates the PRN is predicted to be visible but undetected. A green line is predicted to be visible and was detected, and a red line indicates that the satellite is predicted to not be visible, but was still detected.Figure 5: Depiction of the regions of a GPS orbit where the Falcon Gold satellite could potentially detect GPS signals based on visibility.
As a preliminary step to evaluate the Falcon Gold data, we analyzed the Doppler shifts that were detected at 12 locations along the Falcon Gold trajectory above the constellation. By comparing the Doppler frequency shifts detected to the ones predicted by calculating the rate of change of the range between the GPS satellites and modeled Falcon Gold satellite, we calculated the range rate root-mean-square error (RMSE). Through this analysis, we were able to verify the locations on the predicted trajectory that closely matched the detected Doppler shifts.
These results are used to direct our investigations to regions of the dataset to parameterize our orbit track in a way to effectively search our delay and Doppler correlograms to populate our spatial correlograms within the DPE. Figure 6 shows the time history of the difference of predicted range rates on the trajectory and the detected range rates on the trajectory. That is, a constant detected range rate value is subtracted from a changing range rate for the duration of the trajectory and not just at the location on the trajectory at the detect time (dashed vertical line). From this we can see that the TRACE method gives range rates near the detected ranges at the approximate detection time for the 12 different segments.
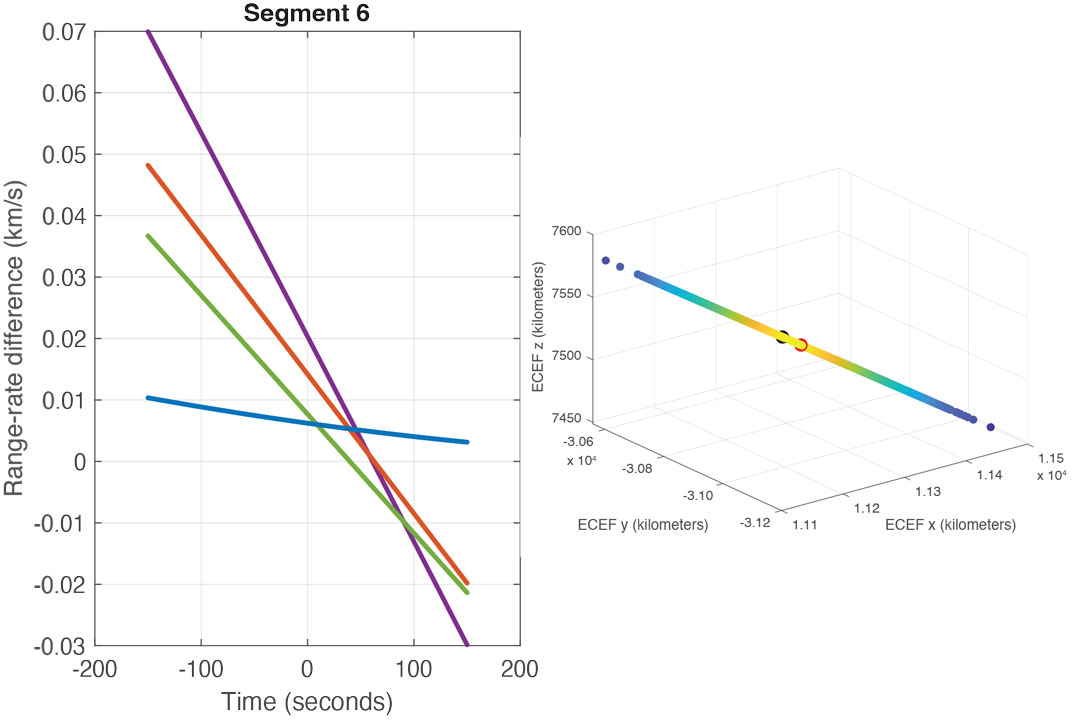
Figure 6: Plots depicting the 12 segments of detection and the corresponding time history of differences of range-rate values for each GPS PRN detected. The time history is of the range-rate difference between the predicted range rate from the TRACE-estimated trajectory and the constant detected range rate at the detection time (vertical line).
Excluding Segment 12, which was below the MEO constellation altitude, Segment 6 has more detected range rates than that of the other segments. On closer inspection of this segment, and using IGS precise orbit data products, it appears that the minimum RMSE of the range rates from the detected PRNs is off from the reported detection time by several seconds (see Figure 7). Investigating regions along the Falcon Gold TRACE-estimated trajectory and assuming a mismatch in time tagging results in a location (in Earth-centered Earth-fixed coordinates) with a lower RMSE for the predicted range rates compared to detected range rates.
Figure 7: Range-rate difference between the predicted range rate from the TRACE-estimated trajectory and the constant detected range rate at the detection time (left). A portion of the trajectory around Segment 6 with the TRACE-estimated location at the time of detection (red) and the location with the minimum RMSE of range rate (black).
To determine the search space for the DPE, we first determine the location along the original TRACE-estimated trajectory with the minimum RMSE of range rates for each segment. Then we propagate the state (position and velocity) at the minimum location to the Segment 6 time stamp. If the time segment has more than three observed range rates (Segment 6 and Segment 12), we perform a least squares velocity estimate using the range-rate measurements, using the locations along the trajectory and selecting the location with the smallest RMSE. Then, for Segment 12, the position and velocity obtained from least squares is propagated backwards in time to the Segment 6 timestamp. All of these points along the trajectory as well as the original point from the TRACE estimated trajectory are used in a way similar to the method of using a sigma point filter. Specifically, the mean and covariance of the position and velocity values are used to sample a Gaussian distribution. This distribution will serve as the first iteration of the candidate locations for DPE. There were a total of three iteration steps and at each iteration the range of clock bias values over which to search was refined from a spacing of 1,000 meters, 100 meters, and 10 meters. Also on the third iteration, the sampled Gaussian distribution was resampled with 1,000 times the covariance matrix values in the directions perpendicular to the direction to Earth. This was done to gain better insight into the GPS satellites that were contributing to the DPE solution.
RESULTS
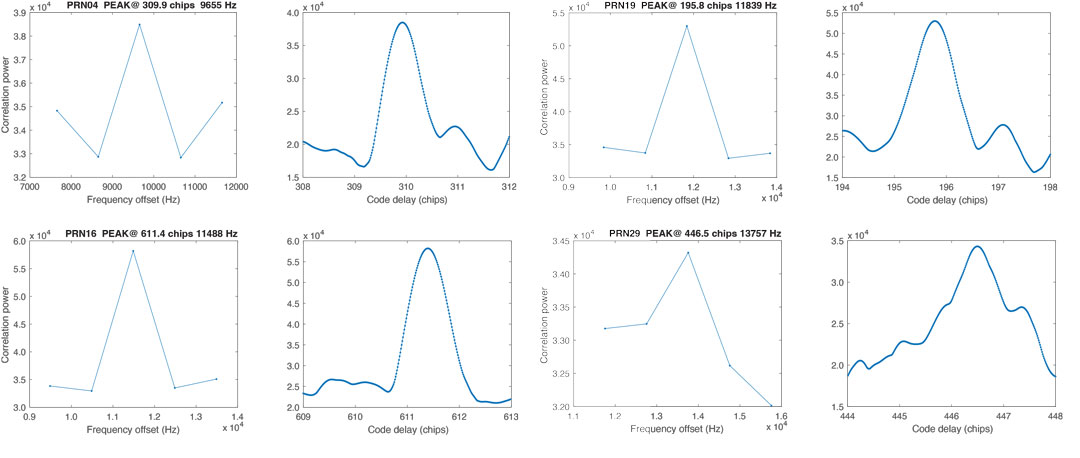
Figure 8 shows the correlation peaks for each of the signals reported to be detected using a 15-millisecond non-coherent integration time within the DPE acquisition. Satellite PRNs 4, 16 and 19 are clearly detected. Satellite PRN 29 is less obviously detected, but the maximum correlation value is associated with the reported detected frequency. However, this is the peak detected frequency only if the Doppler search band is narrowly selected around the reported detected frequency. Similarly, while the peak code delay shows a clear acquisition peak for PRNs 4, 16 and 19, for PRN 29 the peak value for code delay is more ambiguous with many peaks of similar magnitude of correlation power. Figure 8 depicts the regions around the max peak correlation chip delay.
Figure 8: Acquisition peak in frequency (left) and time (right) for PRN 4, 16, 19 and 29. The correlograms are centered on the frequency predicted from the range rate calculated along the trajectory.
For the first iteration of DPE, the peak coordinated acquisition values for PRN 16 and PRN 4 are chosen for the solution space. From the corresponding spatial correlogram, the chosen candidate solution is roughly 44 kilometers away from the original position estimated using TRACE.
For the second iteration of DPE, the clock bias is refined to search over a 100-meter spacing. The peak values for PRN 16 and PRN 19 are chosen for the solution space and the chosen candidate solution is roughly 38 kilometers away from the original position estimated using TRACE.
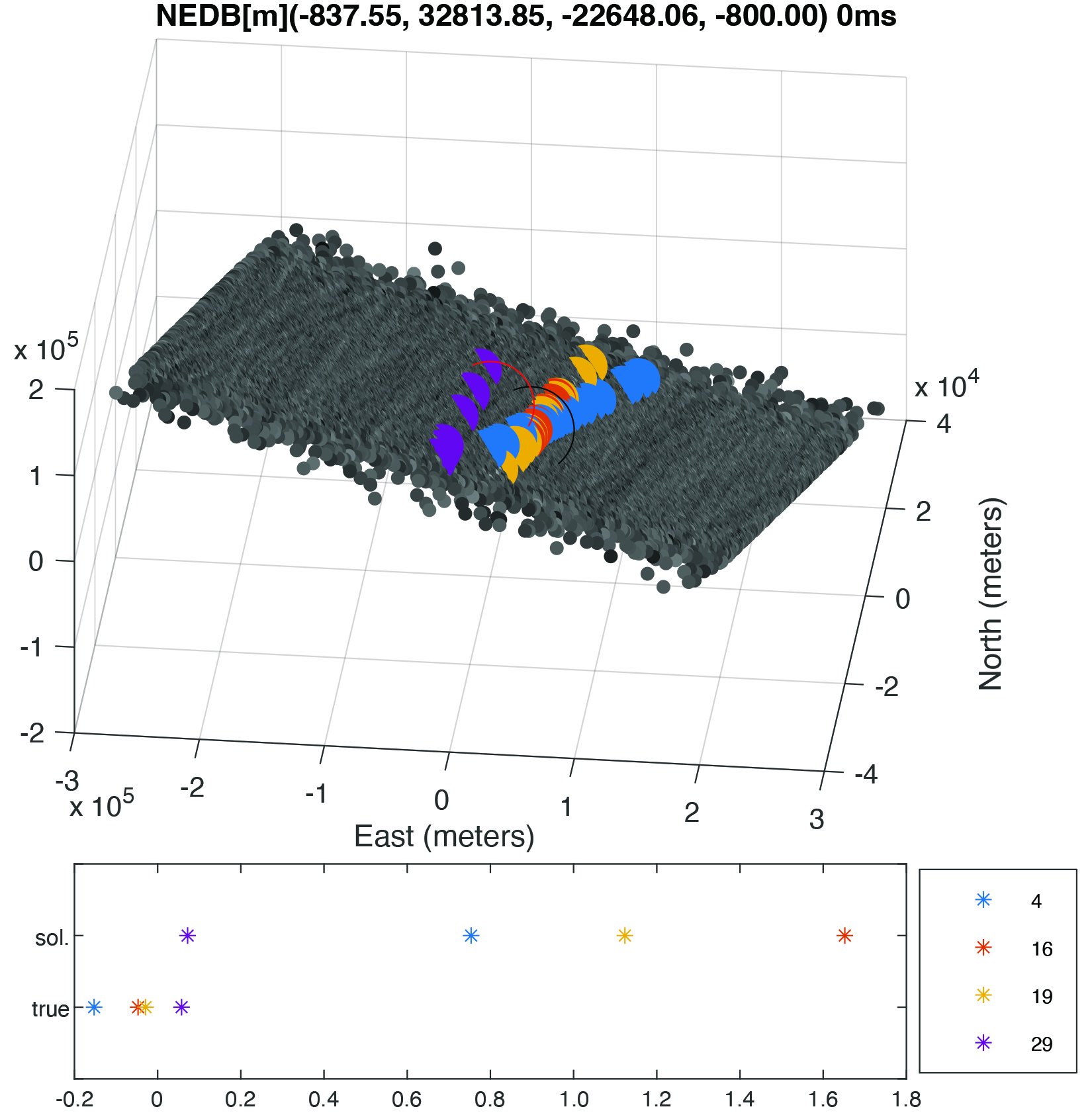
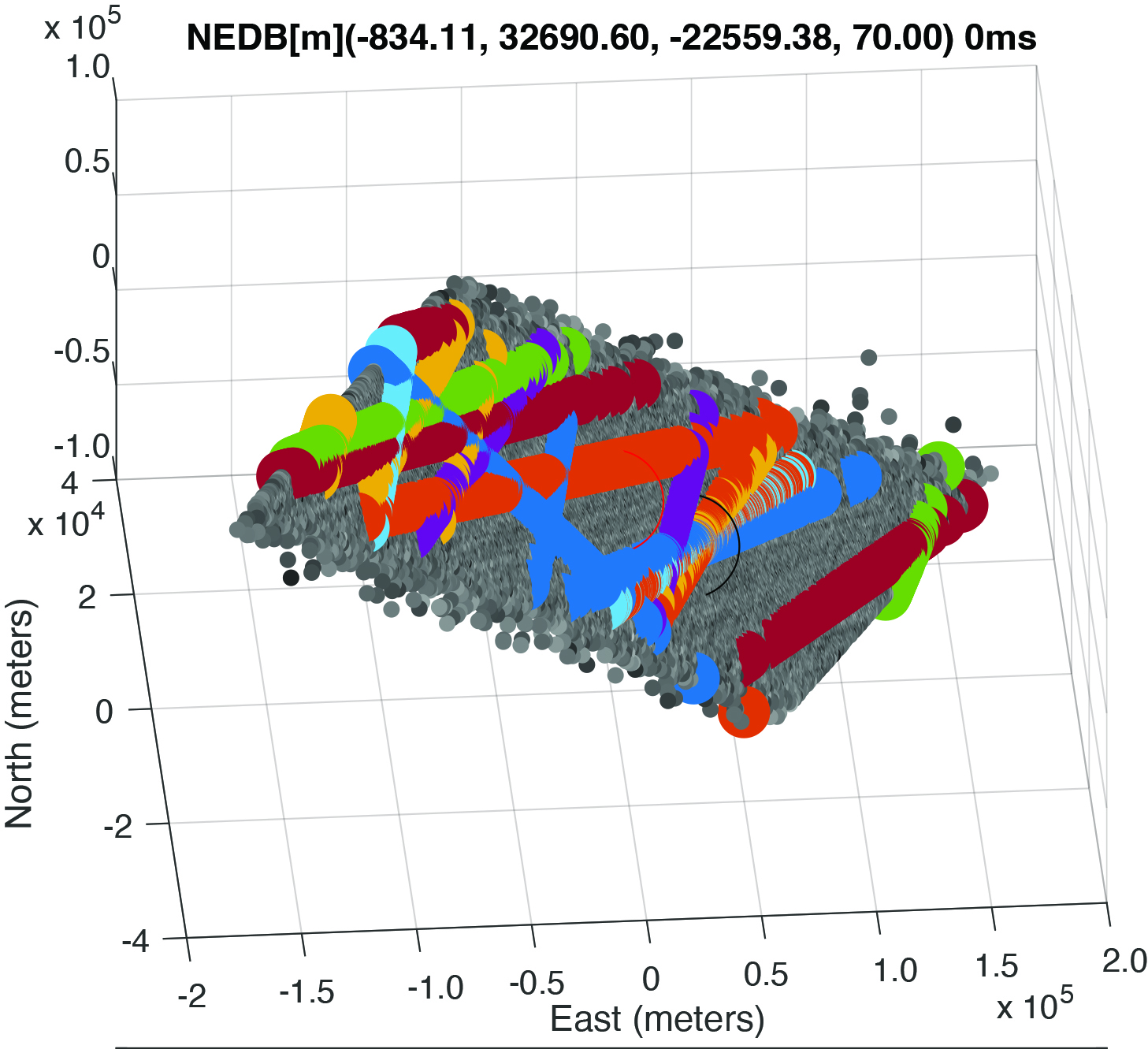
For the final iteration, Figures 9 and 10 depict the solutions with the 10-meter clock bias spacing and the approach of spreading the search space over the dimension perpendicular to the direction of Earth. Again, this was done to illustrate how the peak correlations appear to be drawing close to a single intersection location. However, the results fall short of the type of results shown in the spatial correlogram previously depicted in Figure 2 when many satellite signals were detected.
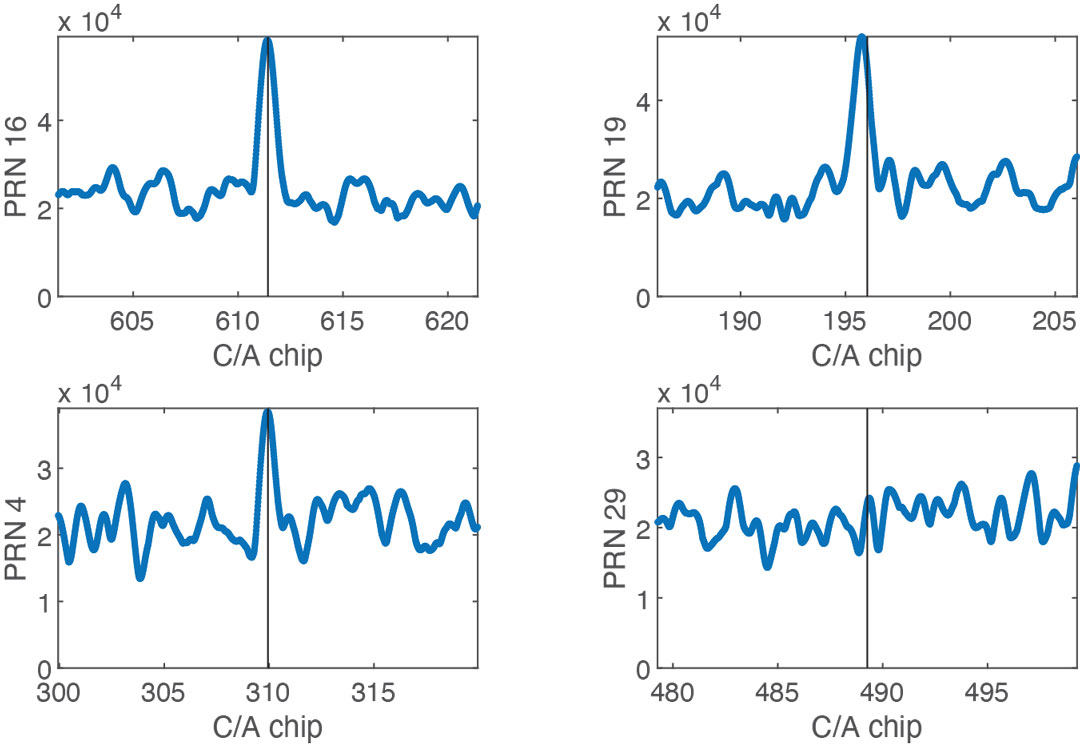
Figure 9: Acquisition peaks plotted in the time domain with the candidate location chosen at the location of the vertical black line for the detected PRNs for the third iteration of the DPE method.Figure 10: Spatial correlogram with the candidate location chosen at the location of the black circle for the detected PRNs for the third iteration of DPE method. The original TRACE-estimated position is indicated by a red circle. The two positions are approximately 28 kilometers apart.
A similar iterative method was followed using not just the four detected PRNs, but any satellite that was predicted to be visible with the relaxed criteria allowing for visibility based on receiving signals from the first and second sidelobes of the antenna. This is predicted using a larger 40° away from the GPS antenna boresight criterion. The final spatial correlogram (Figure 11) shows similar results to the intersections shown in Figure 10. However, there is potentially another PRN shown with a peak contribution near the original intersection point. These results are somewhat inconclusive and will need to be investigated further.
Figure 11: Spatial correlogram with the candidate location chosen at the location of the black circle for the detected PRNs for the third iteration of DPE method using additional satellites. The original TRACE-estimated position is indicated by a red circle. The two positions are approximately 24 kilometers apart.
CONCLUSIONS AND FUTURE WORK
Our research investigated the DPE approach of positioning beyond the GNSS constellations using real data. We will further investigate ways to parameterize our estimated orbit for use within a DPE algorithm in conjunction with other orbit determination techniques (such as filtering) as our results were promising but inconclusive. Some additional methods that may aid in this research include investigating the use of precise SP3 orbit files over the navigation message currently used (BRDC) within our DPE approach. Also, some additional work will need to be completed in determining the possibility of time tagging issues that could result in discrepancies and formulating additional methods related to visibility prediction that could aid in partitioning the search space. Additionally, we plan to investigate other segments where few signals were detected, but where more satellites are predicted to be visible (a better test of DPE). Finally, using full 40-millisecond data segments rather than the 15 milliseconds used to date may provide the additional signal strength needed to give more conclusive results.
ACKNOWLEDGMENTS
This article is based on the paper “Direct Positioning Estimation Beyond the Constellation Using Falcon Gold Data Collected on Highly Elliptical Orbit” presented at ION ITM 2023, the 2023 International Technical Meeting of the Institute of Navigation, Long Beach, California, January 23–26, 2023.
KIRSTEN STRANDJORD is an assistant professor in the Aerospace Engineering Department at the University of Minnesota. She received her Ph.D. in aerospace engineering sciences from the University of Colorado Boulder.
FAITH CORNISH is a graduate student in the Aerospace Engineering Department at the University of Minnesota.
China’s BeiDou GNSS is newer, has more features, is more accurate, and has more satellites in the skies of more nations than the venerable U.S. GPS, according to Sarah Sewall, Executive Vice President for Strategic Issues at IQT.
Image: BeiDou program
More than that, it is one example of “a new form of great power competition that most in the U.S. government don’t recognize,” she said. China is providing superior precision, navigation, and timing information to enhance its diplomatic, economic and military power and the United States cannot afford to cede this area of longstanding advantage.
In a recent paper published by Harvard’s Belfer Center for Science and International Affairs, “China’s BeiDou: New Dimensions of Great Power Competition,” Sewall and co-authors Tyler Vandenburg and Kaj Malden outline their finding that China’s version of GPS is part of a longstanding effort to join the technological ranks of leading nations and leverage its capabilities to achieve geopolitical advantage in many areas.
“First, the global reach of BeiDou ensures that the Peoples’ Liberation Army is no longer dependent on another nation’s satnav. China’s economy — and those of other nations relying on BeiDou — can continue to function even if GPS is degraded or denied,” Sewall stated. “This may increase Beijing’s incentives to attack other national satellite capabilities.”
“BeiDou is also an economic driver for the Chinese economy and innovation. The output of China’s commercial space and navigation services industry has increased by tens of billions in the last decade, and new applications such as precision agriculture and self-driving cars show no sign of slowing,” Sewall continued.
The focus of Sewall’s paper, though, is the way BeiDou supports China’s Belt and Road and Digital Silk Road initiatives to gain influence and leverage around the world. She points out that in cases where BeiDou provides the most accurate positioning, navigation, and timing (PNT) data, particularly in the global south, China may be able to hold much of another nation’s economy hostage.
The BeiDou constellation has more satellites than GPS or any other system. It also has more than ten times the monitoring stations in other countries than have been deployed for GPS. As a result, in many places, particularly in the developing world, BeiDou’s accuracy is much better.
Her assessment of BeiDou’s technical superiority received some unexpected support recently from a government advisory board on GPS. It reported that “GPS’s capabilities are now substantially inferior to those of China’s BeiDou,” and urged the administration to regain U.S. leadership in the field.
Being newer and more advanced makes it easier for China to encourage other nations to use BeiDou signals and purchase specialized equipment, especially when equipment purchases are heavily subsidized by the Chinese government.
This is important because systems such as GPS and BeiDou provide more than just directions to the nearest coffee shop. Their precise PNT signals are used for everything from synchronizing cellphone networks and industrial machine controls, to time stamping financial transactions, and coordinating electrical grids. GPS has been called “the silent utility” because signals are used in almost every technology.
“It is very difficult for government leaders in the developing world to turn down discounted infrastructure and opportunities for economic development,” Sewall said. “Even if they know that tying that infrastructure to Chinese signals may give the CCP [Chinese Communist Party] a future on/off switch to their economies.”
The West and the United States in particular, faces challenges confronting China’s efforts with BeiDou, according to Sewall.
“Many in government equate national power with military power, but that’s a narrow and insufficient formulation, particularly in the 21st century,” Sewall said. “American officials under appreciate China’s efforts to create commercial technology dependencies abroad. The United States has left a vacuum in the developing world that our industry is seemingly unable to fill in the face of competition from Chinese firms that are heavily supported by their government.”
Sewall describes a Chinese “tech stack” being exported that include BeiDou services as part of Belt and Road and Digital Silk Road. It is comprised of a hierarchy of equipment that includes network cables, servers, and cell phones.
“We don’t really have a democratic approach to help foreign nations make meaningful technology choices. We risk ceding global infrastructure to China if we fail to help Western firms offer their own integrated products and services to the developing world,” she said.
If we recognized this new form of great power competition, America could easily leap frog China in areas such as satellite navigation, said Patrick Diamond, a member of the President’s Advisory Board on GPS.
“We could provide higher accuracy GPS and make signals much more secure though internet delivered authentication,” Diamond said. “We could offer complementary terrestrial systems to GPS that would give other nations their own sovereign source of precise time and location while at the same time cooperating with our signals from space.”
“Competing effectively with China in the coming decades will require Americans to think more holistically,” Sewall said, “from realizing that GPS is not just about the military and space, to understanding that national power is more than the ability to prosecute war.”
From left to right: Sylvain Loddo, director of the Galileo ground segment program at ESA, Ennio Guarino, head of the EGNOS and Galileo programs at ESA, Lionel Salmon, director of cybersecurity for information systems at Thales, and Alexandra Porez, director of cybersecurity for satellite systems at Thales. (Image: Thales)
Thales and the European Space Agency (ESA) will be working together on the cybersecurity aspects of the Galileo Second Generation (G2G) program.
Under the partnership, Thales’ scalable and flexible architecture, and security equipment will enable the G2G program to strengthen its ability to detect and respond to new cyberthreats. The end-to-end solution Thales proposed will contribute to the development of greater security and resilience of satellites.
In addition, Thales Alenia Space has partnered with the ESA to design and build the G2G ground mission segment, as well as support system engineering and technical assistance activities. The company also will provide six of the 12 satellites of the constellation.
The second-generation ground mission segment is designed to generate and connect the navigation services to the Galileo satellites and to keep the satellites synchronized with a common time reference. The first version will arrive in time for the launch of the first second-generation satellites and for the validation of the system’s in-orbit capabilities. The second version will be responsible for the missions of both the first- and second-generation Galileo satellites.
The new ground mission system, which includes several major technological innovations, will provide more than four billion users worldwide with improved performance in terms of positioning, navigation and synchronization.
Four T300’s from ComNav Technology have been used as active control GNSS points on the top of Sweden’s tallest building, Karlatornet, during its construction to deliver 3D coordinates to total stations and one was used as a base station. The building is set to be complete this month.
The T300 is a receiver with radio frequency, a baseband chip built in, and a unique quantum-real-time kinematic (RTK) algorithm. It supports full constellation systems including BDS-2, BDS-3, GPS, GLONASS, Galileo, QZSS and NavIC.
The receiver is designed for demanding surveying tasks, features tilt compensation, 4G/Wi-Fi connection, 8-GB internal memory and an easy survey workflow with Android-based Survey Master Software. It is designed to make collecting accurate data easy and fast, whether done by a beginner or experienced professional surveyor, the company said.
A report by CNBC — based on a paper published by Harvard’s’ Belfer Center for Science and International Affairs and written by Sarah Sewall — noted a growing concern that China’s BeiDou is technologically superior to GPS and serves much of the population better.
Experts in the CNBC report explained that BeiDou supports China’s military ambitions, has spurred economic growth in the country, and has increased its diplomatic leverage.
The first BeiDou satellite was launched in 2000 and served only mainland China. The system now consists of 45 operational satellites with 30 of them being the latest generation BDS-3 satellites.
Image: Bedou.gov
In 2020, China launched the last BeiDou satellite, completing the constellation. Since then, the influence of BeiDou has grown, with an estimated 1.1 billion people now using the system.
One feature in the latest BeiDou satellites is two-way messaging that is mainly available in China and requires special chips that are not widely available in the consumer market. It enables users to send short messages in areas without ground network cell coverage and can be used for search and rescue operations.
Surveillance fears
The CNBC report noted the fear that, with its enhancements, the BeiDou system could be used as a surveillance device — as the two-way messaging feature reveals a user’s locations as well as other types of data.
Additionally, with the growing number of apps for cellphones and an increase in autonomous vehicles that use the BeiDou system, more and more user data is being transmitted.
The bottom line
Satellites in the United States’ GPS constellation do not yet have those kinds of features.
There are 31 operational GPS satellites, 6 of which are GPS III satellites.
Image: GPS.gov
GPS satellite modernization
In 2008 Lockheed Martin beat out Boeing — the manufacturer of older GPS satellites — to build the GPS III satellites, the last of which was delivered in February. GPS III satellites deliver enhanced performance through a variety of improvements, including increased signal protection with improved accuracy.
GPS III SV07, SV08, SV09 and SV10 (SV stands for “space vehicle”) are awaiting launch at Lockheed Martin’s GPS III processing facility in Waterton, Colorado.
Lockheed Martin is now working on 22 GPS IIIF satellites — contracted in 2018 — that will feature more advanced capabilities. These satellites are expected to launch in 2026.
The U.S. Space Forceexercised its second contract option valued at approximately $737 million for the procurement of three additional GPS IIIF space vehicles from Lockheed Martin on Oct. 22, 2021. This contract option is for GPS IIIF satellites 15, 16 and 17 (SV15-17).
The entire fleet of GPS satellites is expected to be modernized in 2032 or 2033. However, for now, President Biden’s National Space-Based Positioning Navigation, and Timing (PNT) Advisory Board recognizes the need for a resilient national PNT architecture and acknowledges that BeiDou is technologically superior to GPS.
Galileo’s ground segment has gained a new asset, the Telemetry, Tracking and Control (TT&C) facility — a 13.5-m parabola dish mounted on top of a 10-m high building structure of made of steel and concrete. It is based within Europe’s launch site in Kourou, French Guiana, beside TTCF-2.
The TT&C antennas are uncrewed and operate on a fully automated basis from the two Galileo control centers located in Oberpfaffenhofen, Germany, and Fucino, Italy. The TT&C antennas are crucial to regular communication with the Galileo satellites.
This latest antenna will play an important role during the upcoming modernization activities of the earlier TT&C antennas in the station network, which have been in service for several years. TTCF-7 will take over their tasks during the maintenance activities when they need to be taken offline.
PlantiQ — an atmospheric observing systems company — will begin daily delivery of its signal to noise ratio GNSS-radio occultation (RO) data to the National Oceanic Atmospheric Administration (NOAA) under the NOAA’s IDIQ-2 operational Delivery Order-2.
The NOAA has allocated $59.6 million over the next five years to use commercial satellite data to achieve high-quality weather forecasting and atmospheric research.
“By incorporating PlanetiQ’s commercial high quality GNSS-RO data, coupled with our deep understanding of RO technology, NOAA will have the information to significantly improve short and medium-range weather forecasts, and provide essential insights to enhance climate change research for the government, military and the private sector,” Ira Scharf, PlanetiQ CEO, said.
PlanetiQ supplies GNSS-RO data to NOAA from its growing constellation of satellites, which has become a critical part of the global observing system.
The U.S. Air Force Research Laboratory has pushed back the launch of the Navigation Technology Satellite-3 (NTS-3) until spring 2024 as the debut of the Vulcan Centaur rocket from the United Launch Alliance (ULA) — that NTS-3 was set to be launched on — has been delayed, reported Defense News.
NTS-3 was scheduled to launch later this year aboard and would remain in a near-geosynchronous orbit for an inaugural year of testing. The experimental satellite aims to shape the future of U.S. positioning, navigation and timing capabilities and to help U.S. forces to operate in GPS-denied environments and areas prone to spoofing.
According to Defense News, ULA delayed the debut of the Vulcan Centaur rocket as it is incorporating a fix to a testing anomaly, which was discovered in March.
NTS-3 minimizes the impacts of GPS jamming through rapidly reprogrammable signal waveforms, frequency agility and increased signal strength. Its embedded software and firmware are reprogrammable on-orbit.
When paired with reprogrammable receivers, the U.S. Air Force and U.S. Space Force can react in real time as threats evolve on the battlefield. In addition, NTS-3 has enhanced processors to support more complex signals.
In January, L3Harris delivered the NTS-3 vehicle to Kirtland Air Force Base, New Mexico, to prepare the satellite for launch. The Air Force Research Laboratory and L3Harris are working together to complete space vehicle testing, as well as to launch vehicle integration and enterprise integration to confirm compatibility between the control segment, ground receivers and the satellite vehicle.
“Could a new PNT constellation using LEO satellites fully replace the services provided by the four existing GNSS constellations?”
Mitch Narins
“From a pure capabilities standpoint, the answer is “Yes”. LEO constellations can provide the PNT performance metrics that users require. However, should this strategy be followed, it would lack the diverse, complementary solutions needed to ensure the safety, security, and efficiency of critical infrastructure. Many have recognized the need for resilient PNT solutions and identified system-of-systems approaches. Multiple satellite constellations — MEOs and LEOs (despite the number of platforms) — lack this needed resilience. A resilient system-of-systems should include satellites in multiple orbits and complementary ground-based PNT infrastructure, each providing needed performance and overall demonstrating resilience from diverse threats.”
— Mitch Narins Strategic Synergies
John Fischer
“In theory, yes. With a much stronger signal (antijam) that is encrypted (antijam), they counter GNSS’s two main vulnerabilities. However, with a paid service business model, it is difficult to compete with a free service. Moreover, large constellations are needed to overcome GDOP. OneWeb, Starlink, et al. already have launched and will continue to launch large constellations, so they must compete with these high bandwidth communications constellations that can provide accurate PNT as a side service and don’t have a GDOP limitation because of their size. Adoption of a single-purpose PNT system will be difficult.”
— John Fischer Orolia
Bernard Gruber
“Yes, it could. That said, as with any new product or technology, evolution of PNT capabilities will be dependent on competition, value or threats that undermine the current environment. Burgeoning systems such as Xona, Satelles or any number of augmentations utilizing “signal of interest” such as Starlink will rightly contribute to the evolution of enhanced PNT. Current advantages of LEO-based systems such as increased received power, decreased convergence time and numerical diversity are noteworthy, but replacing an investment of $100B+ government backed GNSS systems that adhere to well established policies and published ICDs is another.”
— Bernie Gruber Northrop Grumman
Jules McNeff
“As my colleagues above note, the answer is yes from a technical perspective. However, in practice, not so much. Even with software-defined receivers, issues of signal reception and processing, interface standards, comm/nav service prioritization, security, integration into complex systems, integrity assurance, etc. make use of such nav services in lieu of purpose-built GNSS services impractical.”
Advanced industrial societies are increasingly reliant on the fantastic capabilities of global navigation satellite systems (GNSS) — GPS, GLONASS, BeiDou and Galileo — and, therefore, increasingly vulnerable to their weaknesses. From providing our position on a map on our smartphone to timing financial transactions, cell phone base stations, and the internet; from steering tractors in the field to guiding first responders; from giving surveyors sub-centimeter accuracy to monitoring continental drift; from providing navigation to ship captains and airplane pilots, to enabling automated control of earth moving machinery, GNSS have become a critical infrastructure. Yet their well-known vulnerabilities — such as jamming, spoofing, multipath and occultation — continue to fuel the development of complementary sources of positioning, navigation and timing (PNT) data, especially for new and rapidly expanding user segments such as autonomous vehicles.
In a January 2021 report, the U.S. Department of Transportation pointed out that “suitable and mature technologies are available to owners and operators of critical infrastructure to access complementary PNT services as a backup to GPS.”1
Several new PNT systems are being developed and deployed that are partially or entirely independent of the four existing GNSS constellations. This cover story focuses on the following companies, products and services:
Safran Federal Systems (formerly Orolia Defense & Security) makes the VersaPNT, which fuses every available PNT source — including GNSS, inertial, and vision-based sensors and odometry. I spoke with Garrett Payne, Navigation Engineer.
Xona Space Systems is developing a PNT constellation consisting of 300 low-Earth orbit (LEO) satellites. It expects its service, called PULSAR, to provide all the services that legacy GNSS provide and more. I spoke with Jaime Jaramillo, Director of Commercial Services.
Spirent Federal Systems and Spirent Communications are helping Xona develop its system by providing simulation and testing. I spoke to Paul Crampton, Senior Solutions Architect, Spirent Federal Systems as well as Jan Ackermann, Director, Product Line Management and Adam Price, Vice President – PNT Simulation at Spirent Communications.
Satelles has developed Satellite Time and Location (STL), a PNT system that piggybacks on the Iridium low-Earth orbit (LEO) satellites. It can be used as a standalone solution where GNSS signals will not reach, such as indoors, or are otherwise unavailable. I spoke with Dr. Michael O’Connor, CEO.
Locata has developed an alternative PNT (A-PNT) system that is completely independent from GNSS and is based on a network of local ground‐based transmitters called LocataLites. I spoke with Nunzio Gambale, founder, chairman, and CEO.
Due to the limited space available in print, this article only uses a small portion of these interviews. For full transcripts of them (totaling more than 10,000 words) click here.
1 Andrew Hansen et al., Complementary PNT and GPS Backup Technologies Demonstration Report, prepared for the Office of the Assistant Secretary for Research and Technology, Department of Transportation, January 2021, p. 195.
Locata dish antenna pointed to the European Union’s Joint Research Center in Ispra, Italy, 44 km away, just under the setting sun. The Yagi antenna above is pointed to a cell tower in Como and used to connect the system for remote control and data logging. (Image: Locata)
Complementary PNT
“Traditionally, augmentation to GNSS has been done through inertial navigation systems (INS),” Price said. “More recently, ground- and space-based augmentation systems have increased in usage. However, both technologies depend on the absolute positioning information provided by GNSS. They do not represent a true alternative PNT.”
To facilitate the development of advanced and autonomous applications, Price suggested incorporating terrestrial sources of PNT as well as ones based on LEO, medium-Earth orbit (MEO) and geostationary equatorial orbit (GEO) satellites. This, he added, would also keep costs from becoming prohibitive. “LEO brings many benefits in comparison to MEO in just about every industry to which it can be applied,” Jaramillo said.
While mass reliance on GNSS facilitates access to GNSS data and makes devices that use it increasingly cost-effective, over-reliance on a single sensor is risky, Austin pointed out.
“That’s where complementary PNT comes in: if you can put your eggs in other baskets, so you have that resilience or redundancy, then you can continue your operation — be it survey, automotive or industrial — even if GNSS falls or is intermittently unavailable or unavailable for a long time,” Austin said.
It has been said that “the only replacement for GNSS is another GNSS.” Inertial navigation, dead reckoning, lidar, and referencing local infrastructure that, in turn, has been globally referenced using GNSS, enable mobile platforms to maintain relative positioning during GNSS outages. However, absolute positioning will continue to require GNSS. “If you claim to be breaking free from GNSS you’re really saying, ‘I can navigate in this building, but I don’t know where this building is,’” Austin said.
GNSS-INS Integration
GNSS and INS have always been natural allies because they complement each other. The recent completion of the BeiDou and Galileo constellations, which has greatly increased the number of satellites in view, has made the requirement for six satellites at any one time for real-time kinematic (RTK) “a much more reasonable proposition,” Austin said. Coupled with the drop in the price of inertial measurement units (IMU), this has made it possible to “make a more cost-effective IMU than ever or spend the same and get a much better sensor than you ever could before,” he said. “Your period between the GNSS updates is also less noisy and you have less random walk and more stability.”
It used to be that the performance of an accelerometer might far outweigh that of a gyroscope, resulting in excellent velocity but poor heading. “Now,” Austin said, “we can pick a much more complementary combination of sensors and manufacture and calibrate an IMU ourselves while using off-the-shelf gyroscopes and accelerometers. That allows us to make an IMU that is effectively not bottlenecked in any one major area.”
Autonomous vehicles require decimeter accuracy to keep to their lane, while their absolute position is irrelevant to that task. It is, however, essential for map navigation and to know about infrastructure such as traffic signs and stoplights that may not be in a vehicle’s line of sight.
“That’s where the global georeferencing comes in and where GNSS remains critical,” Austin said. “One of the key things we’re examining is GNSS-denied navigation: how we can improve our inertial navigation system via other aiding sources and what other aiding sensors can complement the IMU or inertial measurement unit to give you good navigation in all environments. Use GNSS when it’s good, don’t rely on it when it’s bad or completely absent.”
Nowadays, car makers are increasingly moving their research and development tests from indoor, controlled environments to open roads. Therefore, “they are looking for a technology that allows them to keep doing those tests that they did on the proving ground, but in real world scenarios,” Austin said. “So, they rely on the INS data to be accurate all the time. In autonomy and survey, on the other hand, the INS is used actively to feed another sensor to either georeference or, in the case of autonomy, actively navigate the vehicle. So, that data being accurate is critical because an autonomous vehicle without accurate navigation cannot move effectively and would have to revert to manual operation.”
Image: Xona Space Systems
New vs. Old
Complementary PNT systems differ from legacy GNSS along several variables. One is coverage. For example, Satelles and Xona will provide global coverage, while Versa PNT and Locata are local. Another is encryption. Unlike GPS, which encrypts only its military SAASM/M-code signal, Xona’s PULSAR system will encrypt all its signals, Jaramillo said. “For autonomous applications, security is very important. If you’re riding in an autonomous car, you certainly don’t want somebody to be able to spoof the GNSS signal and veer it off course.”
Additionally, the design of Xona’s constellation includes a combination of polar and inclined orbits, which will greatly improve coverage in the polar regions compared to current GNSS coverage. This is particularly important as climate change makes the arctic more accessible. “The idea of having a LEO-based constellation is to take advantage of what can be done in LEO for GNSS,” Jaramillo said. “If you want the most resilient time and position, you need to use a combination of everything.”
Based on its architecture, Jaramillo said, Xona will provide better timing accuracy than GNSS does today. “Our satellites are designed to use GPS and Galileo signals, as well as inputs from ground stations, for timing reference and will share their time amongst themselves. We will average all these timing inputs and build a clock ensemble on the satellites. That enables much higher accuracies than just having a few single inputs.”
Satelles’ STL service can either substitute for GNSS where the latter is unavailable or supplement it where it is available. When used as a supplement, “the goal is having a solution that is resilient to an outage, interference, jamming, spoofing, those sorts of things,” O’Connor said. “In that case, the receiver card that might be provided by one of our partner companies would have both GNSS and STL capabilities and would take the best of both worlds.” Depending on the product configuration, its locational accuracy is generally in the 10- to 20-meter range, O’Connor said.
Orolia Defense & Security’s Versa PNT “is an all-in-one PNT solution that provides positioning, navigation, and very accurate timing,” Payne said. “Every type of sensor that you’re using for PNT has its strengths and weaknesses. That’s why we have a very accurate navigation filter solution that dynamically evaluates the sensor inputs.” In GNSS-degraded environments, the Versa’s software alerts users that GNSS signals are not reliable, automatically filters out those measurements, and navigates on the basis of the other sensors, such as an IMU, a speedometer, an odometer, or a camera.
Locata’s system is completely independent of GNSS because it does not require atomic clocks. At its heart is the company’s TimeLoc technology, which generates network synchronization of less than a nanosecond, Gambale said. “TimeLoc,” Locata literature states, “synchronizes the co-located signals with other LocataLites as the signals are slewed until the single difference range between it and the other LocataLites is the geometric range. This internal correction process is accurate to millimeter level.” Applications of this system include indoor positioning for consumer devices such as mobile phones, industrial machine automation for warehousing and logistics, positioning first responders within buildings, and military applications in GPS-jammed environments.
Constellations and Timelines
How long will it take to develop and/or complete these complementary PNT systems?
Xona is a start-up, and its timeline will depend on its success with investors.“We have basically locked down our signal and system architecture. Now, it’s a matter of building out the ground segment and launching satellites,” Jaramillo said.
Xona’s current target is to launch its first satellites into operation by the beginning of 2025 and to achieve full operational capability by 2027. The company will roll out PULSAR in phases. “In our first phase, we’re going to offer timing services and GNSS augmentation that only require one satellite in view,” Jaramillo said. “Then, as we roll out to phase two, we’ll be able to start to offer positioning services in mid-latitudes with multiple satellites in view. Phase three will include high-performance PNT and enhancements globally.”
Satelles’ STL is already on Iridium’s 66 active satellites, which are all relatively new, having been launched between 2016 and 2018, and cover the entire globe constantly. STL’s signal and capability are flexible, O’Connor said.
Orolia Defense & Security is now evaluating UWB computer technology from different vendors and integrating it in the Versa’s software. “We will probably begin performing full field tests in the first quarter of 2024,” Payne said.
Locata’s mission, Gambale said, “is to deliver technology advances which enable complete, independent sovereign control over PNT for companies, critical infrastructure systems, and in the future – entire nations. It’s designed for the many entities and nations which do not have – and can never afford – their own constellations”.
“Our business model,” Gambale added, “is based on enabling others – from companies through to nations – to develop their systems and products based upon our core technology developments. We do not dictate how our technology will be deployed. Locata’s technology can be available to any suitably qualified partner, to fashion our core developments for their own use.”
The Launch of a Falcon 9 rocket carrying Xona satellites. (Image: Xona Space Systems)
Business Model
It is challenging for any new commercial entrant in the PNT field to challenge a free global service, such as GPS. While all these new services are the opposite of GPS, which is a gift from U.S. taxpayers to the world, their business models vary somewhat.
“We are targeting both mass market applications and high-performance ones,” Jaramillo said. “For the mass market applications, our business model includes a lifetime fee: a customer pays a fee one time, and the service works for the life of the device. For higher performance applications that have more capabilities associated with them, there will be different tiers, each with different services.”
These will include an integrity service that will verify that the signal has a certain level of performance thresholds, for use in critical applications. “If it drops below certain performance thresholds,” Jaramillo said, “we will flag that to the device so that it knows that, even though it is receiving a signal, it should not continue to use it due to signal degradation.”
Receivers and Chipsets
Predictably, these new ventures have spawned a web of alliances.
The success of both Xona and Satelles will hinge in part on the availability of receivers for their signals. To manufacture them, Xona is “in discussions with just about every tier one manufacturer out there,” Jaramillo said. “We have a strong relationship with Hexagon | NovAtel. They have been supportive of us for a long time now and are very advanced in their development and support for our signals.” Additionally, Xona designed its signals “so that most receivers can support them with just a firmware upgrade.”
Satelles is also working with partners, including Adtran (through their Oscilloquartz product line), Jackson Labs (now VIAVI Solutions), and Orolia (now Safran Trusted 4D). “Companies like that provide the solutions that are favored by critical infrastructure providers today,” O’Connor said. “They ultimately integrate our STL capability into their solutions. They can use our reference designs or create their own custom designs based on our reference designs.”
Satelles uses a different process to take measurements of the STL satellite signals than legacy GNSS. “It’s not a single chip that’s measuring both satellites, it’s ultimately two chips that are making those measurements,” O’Connor explained. “Then, we leave it to our partners to determine how to perform the position calculation and the integration of those signals. It can be integrated loosely or tightly.”
Markets and Applications
The target markets and applications for these new PNT services also vary.
The markets in which Satelles has the highest adoption rates are data centers, stock exchanges and 5G networks, said O’Connor. He pointed out that 5G networks need about five to 10 times more nodes to cover a geographic area than 4G networks.
“GNSS has been used for years to time 4G networks, but most 5G network sites — such as femtocells and picocells — are indoors or in places where GNSS is challenged. We deliver that timing service indoors, outdoors, everywhere.” Generally, an STL-only solution is best suited for timing, O’Connor said. “It will do timing at about 100 ns, depending on what kind of oscillator is being used and the exact configuration of the product.”
Orolia provides precise position, timing, and situational awareness for different applications. “Our systems can be used for ground, air and sea-based applications,” Payne said. “At Orolia Defense and Security we market to the U.S. government, defense organizations and contractors.” Beyond those arenas, however, its systems can be used “anywhere accurate position and/or timing is needed.”
Versa PNT. (Image: Safran Federal Systems)
The Role of Simulation
Simulation plays an important role in the development of new PNT systems. “Before the Xona constellation or any other emerging constellation has deployed any satellites, simulation is the only way for any potential end-user or receiver OEM to assess its benefits,” Ackermann said. “Before you can do live sky testing, a key part of enabling investment decisions — both for the end users as well as the receiver manufacturers, and everybody else — is to establish the benefits of an additional signal through simulation.”
Then, new receivers must be validated to ensure they perform as intended. “The best way to do that is with a simulator,” Jaramillo said. “Spirent works with two levels of customers: first, the receiver manufacturers, then all the application vendors that use those receivers.”
Spirent Communications did that for Xona’s system using its new SimXona simulator. “First, we did in-depth validation ourselves,” Ackermann said. “Then, we worked in a close partnership with Xona for them to certify that against their own developments. So, we followed a proven development approach. It’s just that, in this case, the signal comes out of a LEO.” Spirent Communications’ sister company Spirent Federal Systems also provided support to Xona, said Crampton.
Validation and Adoption
The European Commission’s Joint Research Centre in Ispra, Italy, recently conducted an eight-month test campaign to assess the performance of alternative PNT (A-PNT) demonstration platforms, including Satelles and Locata. According to the final report, released in March 2023, the demonstrations “showcased precise and robust timing and positioning services, in indoor and outdoor environments. [T]ime transfer technologies over different means were demonstrated, including over the air (OTA), fiber, and wired channels. The results … showed that all A-PNT platforms under evaluation demonstrated performances in compliance with the requirements set.”
Satelles has also been working with the U.S. National Institute of Standards and Technology (NIST) to evaluate its system. “They have subjected STL to rigorous third-party, hands-off technology evaluations,” O’Connor said. “They confirmed the timing accuracy specifications to UTC and validated the operational characteristics of STL, such as the resilience in the absence of GNSS, the ability to receive the signal indoors, and having global availability.”
The industry is now focused on adoption. “All the providers of these capabilities ultimately need adoption in industry to remain active and viable,” O’Connor said.
With the recent completion of two new GNSS constellations, the growth in the number and variety of augmentation services, and the development and deployment of complementary PNT products and services, the geospatial industry is at an inflection point.