This year marks 50 years since the U.S. Department of Defense approved the design for GPS and first funded the program. It is also the 30-year anniversary of an important milestone – initial operational capability of GPS. Please don’t let its longevity fool you into thinking it is past its prime! GPS is, and will remain, one of the most innovative systems ever designed, funded and operated by the U.S. government.
Today, GPS represents a highly successful public and private partnership, one in which diverse stakeholders continue to coordinate through fora such as the National Executive Committee for PNT and its Advisory Board. and the Civil GPS Service Interface Committee. How did this system become a military, public safety, critical infrastructure, and economic success? The world-class GPS community is made up of the teams and individuals who design, develop and operate these critical technologies as well as the people and organizations that benefit from its applications. From pioneers, scientists, engineers, and Guardians to civil servants, lawmakers, and entrepreneurs, the GPS community has transformed, is transforming, and will continue to transform lives across the globe, and soon, the moon.
GPS World highlighted the important roles played by many early GPS pioneers in a two-part series aptly titled, “Heroes” in the May and June 2010 issues. It has also covered Dr. Gladys West, who is one of the most consequential mathematicians and programmers to contribute to the global success of GPS. Her geodetic models helped refine our understanding of Earth’s shape, which proved fundamental to the success of GPS and its myriad applications. In 2021, the Trimble Foundation established the Dr. Gladys West Scholarship Program. Virginia State University (her alma mater!), North Carolina A&T State University, and Florida International University award four-year scholarships to one student per year to honor Dr. West’s achievements as a woman of science and a woman of color.
A celebration of GPS must also recognize our lawmakers — the people who authorize and appropriate funding for GPS and its augmentation programs. Nearly every U.S. federal department and agency uses these systems to fulfill their missions on behalf of the American people. They also leverage their technical, programmatic, operational, and experiential expertise to ensure that GPS and its augmentation systems remain the best in the world. This work is possible thanks to congressional committees, members of Congress, and staff. The Senate Appropriations and House Appropriations committees, the Senate Armed Services and House Armed Services committees, the Senate Commerce, Science and Transportation and the House Energy and Commerce committees, the GPS Caucus and many more members of Congress, provide critical oversight and funding. Their support ensures that GPS continues to bring $1.7 trillion and counting in economic benefits to the U.S. economy, creating hundreds of thousands of jobs while enhancing national security, public safety and critical infrastructure.
The future is bright for GPS manufacturers and those developing new applications. To realize their success, projects funded by the Infrastructure and Investment Jobs Act and the Inflation Reduction Act will depend on GPS to continue to deliver signals that are accurate, have integrity, and are available and continuous in nature. The next enterprising GPS entrepreneur is waiting in the wings
Thanks to a network of determined individuals, GPS-driven technologies — used to support precision agriculture, safe transportation, synchronized global banking, cutting-edge emergency response, elite and amateur sports, and more — are transforming our lives, creating jobs, and promoting growth across the economy.
GPSIA joins other members of the GPS community by celebrating 50 years of GPS and looks forward to the innovations and applications that will shape the next 50 years and beyond.
In recognition of the indispensable role GNSS plays in shaping the modern world, the Institute of Navigation (ION) has established “International GNSS Day,” which would occur annually on October 23.
This date, written as 10/23, was chosen in honor of the frequency of 10.23 MHz, the original heartbeat of all GPS satellites, signals and receivers. This frequency was later adopted by all GNSS service providers and serves as the basis of L-band signals for over 100 navigation satellites today.
International GNSS Day aims to highlight the global impact of satellite navigation in diverse sectors, including transportation, agriculture, aviation, surveying and more. It provides a platform to recognize the collaborative efforts of nations, organizations and individuals in advancing GNSS technology. ION pays special tribute to the developers of GPS, celebrating 50 years since its inception this year.
By declaring “International GNSS Day,” ION seeks to raise awareness and appreciation for the critical role GNSS plays in navigating the course of our interconnected world.
TRX Systems has announced it is now shipping the Dismounted Assured Positioning, Navigation, and Timing (PNT) System Generation II (DAPS GEN II) solution to the United States Army. The device provides assured PNT to warfighters operating in GPS-denied environments.
In March, the U.S. Army Program Executive Office for Intelligence, Electronic Warfare and Sensors awarded TRX a seven-year, $402 million contract to deliver the DAPS GEN II systems.
TRX DAPS GEN II is a small, handheld device that features efficient power utilization algorithms that enable a continuous stream of assured PNT data for warfighters and their combat systems. To achieve this, the device fuses inputs from a diverse range of PNT sources including M-code GPS, a secure and higher-powered military GPS capability that is resilient against jamming and other threats, complementary sources of position and time data when GPS is degraded, and inertial sensors supporting integrity and positioning, independent of any satellite source.
The TRX DAPS II system is available for purchase by U.S. government entities. Distribution to U.S. allies is restricted to approved cases in the Foreign Military Sales Program.
The United States Space Force’s Space Systems Command (SSC) has a specialized branch responsible for certifying GPS accuracy called the GPS Certification Branch. It is a specialized team within SSC that is responsible for certifying the hardware, software, and firmware used in GPS-based systems.
The certification process conducted by SSC’s GPS Certification Branch involves the evaluation of design and testing for various components of GPS-based systems. This includes user equipment — the devices used by individuals or organizations to receive GPS signals and determine their precise location.
The GPS Certification Branch works with GPS manufacturers, agencies of the U.S. Department of Defense (DOD), and others to establish and maintain certification standards. Collaboration with industry experts, research institutions, and other certification bodies is also an important aspect of the branch’s work to stay informed about technological advancements and ensure the certification process remains up to date with the latest developments.
The certification process also includes space segments — the satellites that transmit the GPS signals, monitoring stations, which track and monitor the performance of the GPS satellites, and the terrestrial modules — that provide end user secured and accurate signals.
Certification of hardware, software, and firmware is critical to ensure that GPS systems meet the standards set by the DOD. This certification ensures that the GPS-based systems used by the military and other DOD agencies are reliable, accurate, and secure. It also ensures that they are interoperable and compatible with other military equipment and communication networks.
The assessment process conducted by the GPS Certification Branch involves thorough testing and analysis of the design, performance, and security of the GPS components. This includes assessing the hardware’s ability to receive and process GPS signals accurately, the software’s ability to interpret and utilize the GPS data effectively, and the firmware’s ability to maintain system integrity and security.
Clocks are at the heart of GPS. Advances in space-qualified atomic clocks that kept time to within 10 nanoseconds over a day were a key development that made GPS possible. It turns out that GPS must account for both special relativity and general relativity to deliver position at 1-meter level and time at 100-nanosecond level to its users. We’ll use these round numbers as user expectations from GPS.
In the simple engineering analysis below, we consider the problems that would have arisen if the engineers had ignored relativity in their design of GPS. The issues related to positioning and time transfer are distinct, so we treat them separately.
GPS is basically a bunch of synchronized, near-perfect clocks in orbit
It’s a mantra worth repeating: To measure ranges to GPS satellites with meter-level accuracy, the clocks on the satellites must keep time with nanosecond-level accuracy.
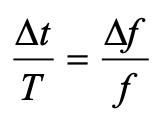
The clocks aboard GPS satellites are extraordinarily stable, typically to one part in 1013 over a day, which is another way saying that they could gain or lose on average 10-8 seconds, or 10 nanoseconds, over 105 seconds, which is roughly the length of a day. It’s a simple calculation. Suppose you measure a time interval of length with an oscillator advertised to have frequency f by counting its periods of oscillation. If the actual frequency is (f + Δf ), you’d measure the time interval as (T + Δt). It is easily shown that:
The fractional frequency stability (f / Δf ) is a key parameter. For an oscillator with stability (f / Δf ) of 10-13 over a day, as noted above, we can limit to 10 nanoseconds on average with data uploads to satellites once a day to re-sync the clocks. An error of 10 nano-seconds in time amounts to an error of about 3 meters in range computation and, speaking roughly, an error of about 3 meters in the position computed by the receiver. We can live with that.
Gravitational and motional effects on GPS clocks
Our previous calculation of the timekeeping error of a satellite clock would have been fine had we not overlooked an important fact: We pretended as though the clocks were at rest on Earth at mean sea level. So, let’s see what relativity has to say about clocks in 20,000-kilometer-high circular orbits around Earth. The satellite orbits are not perfectly circular, or identical, but for now let’s pretend that they are. We call that modeling. The clocks would move at a rate of about 4 kilometers per second and exist in an environment where Earth’s gravity is only about one-fourth that at sea level.
According to the theory of special relativity, a moving clock ticks more slowly when compared with one that’s stationary at sea level. A clock aboard a GPS satellite will lose about 7 microseconds per day. That is three orders of magnitude larger than our budget for satellite clock error discussed earlier, therefore we can’t simply ignore it.
According to the theory of general relativity, on the other hand, a clock in a weaker gravitational field will tick faster than one that’s stationary at sea level. Apparently, gravity weighs down time, too. A clock aboard a GPS satellite in a medium Earth orbit will gain about 45 microseconds per day over a clock that’s at sea level on the earth.
The net effect: A GPS satellite clock will gain about 38 microseconds per day over a clock at rest at mean sea level. This effect is secular, meaning the time offset will grow from day to day.
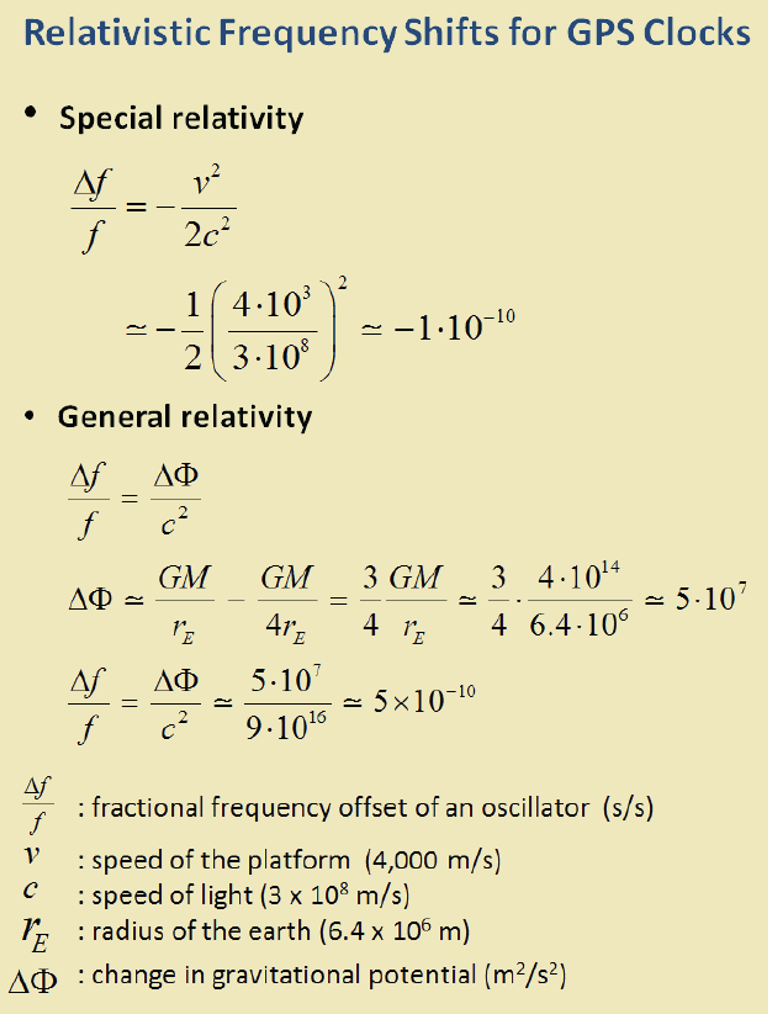
So, you ask: Can you show me how you came up with these numbers, 7 micro-seconds and 45 microseconds? No, but I can point you to the references listed below and I can come close using simple mathematical models: (i) Earth’s gravitational potential is complicated and to simplify things we model Earth as homogeneous in composition and spherical in shape with a radius (rE) of 6,400 kilometers; (ii) aGPS satellite orbit is a circle with radius 4 rE; and (iii) the satellites move at the rate of 4 kilometers/second. We saved ourselves a lot of trouble by agreeing on this simple model.
sidebar
The calculation of the fractional frequency stability (f / Δf ) due to the relativistic effects is now easy and given in the sidebar. The answers are only approximate, but surprisingly close to the numbers cited above. That’s the beauty of good models. To calculate time gained or lost over a day, multiply by the length of a day in seconds.
As an interesting aside, note that the effects predicted by special relativity and general relativity cancel each other for clocks located at sea level anywhere on Earth. Consider two clocks, one located at the North or South Pole, and the other at the equator. The clock at the equator would tick slower because of its relative speed due to Earth’s spin, but faster because of its greater distance from Earth’s center of mass (about 22 kilometers) due to Earth’s flattening. Because Earth’s spin rate determines its shape, the two effects are not independent, and it’s no coincidence that they cancel exactly.
What if GPS forgot about relativity?
What would have happened if the engineers responsible for designing GPS had disregarded relativity? If the GPS satellites were in fact in identical, circular or-bits, their clocks would have shown a puzzling, but identical, behavior of gaining time over clocks of the Control Segment on Earth at a steady rate, about 38 microseconds over a day, the combined effect of special and general relativity.
What would that do to range measurements? A GPS receiver would have meas-ured the ranges to all satellites in view as too short by a common amount (up to about 11 kilometers between daily uploads of clock corrections). However, GPS receivers don’t measure ranges. To measure ranges, the receiver clock would have to be synchronized with the satellite clocks, an onerous requirement. The receivers use inexpensive clocks that drift and have frequency stability no bet-ter than . The receivers measure pseudoranges, i.e., ranges with a common bias on account of the receiver clock offset relative to GPS Time. This bias is es-timated by the receiver, along with its three-dimensional position. The price of an inexpensive receiver clock is that we now have four parameters to estimate and need pseudorange measurements from four satellites.
So, what would that do to positioning? The answer is that the common bias introduced by the relativistic effects would get lumped with the typically much larger bias introduced by the offset in the receiver clock. The position estimate would be unaffected.
Now, what about time from GPS? A GPS receiver used for timing is typically stationary with its antenna location carefully surveyed. In principle, a single pseu-dorange measurement can sync it to GPS Time (and UTC). So, if the relativistic effects had been ignored, the timing accuracy would have suffered to the ex-tent of 38 microseconds per day between updates of the clock parameters. That’s a deal-breaker, considering that we expect 100-nanosecond accuracy.
The relativistic effects discussed so far can be compensated for easily by setting the frequency of the satellite clocks lower (by 0.0045674 hertz) in what’s called “factory offset”: The frequency of a satellite clock is set to 10.22999999543 megahertz so that it will tick in orbit at the same rate as a 10.23-megahertz atomic standard at sea level on Earth. What an ingenious solution!
This factory offset would have accounted for the relativistic effects completely if the GPS satellite orbits were perfectly circular and identical. They are not. You can’t control an orbit perfectly.
So, what about eccentric orbits?
Yes, that’s a complication.
Each orbit is distinct and slightly elliptical. A consequence of this is that the sat-ellite speed is not constant (due to Kepler’s second law): the farther away a sat-ellite gets from Earth in its elliptical orbit, the slower it moves; and the farther away the satellite, the lower is the gravity field. That means the clocks in differ-ent satellites are speeding up and slowing down at different times and at differ-ent rates. The effect for each clock is periodic and quasi-sinusoidal. Averaging the effect over an orbit, we get zero.
For a satellite in an orbit with an eccentricity of 0.02, the net effect is that a clock can be ahead or behind by as much as 45 nanoseconds. The corresponding range error would amount to ± 15 meters. This effect must be accounted for specifically for each orbit. It would require serious bookkeeping on where the satellite has been in its elliptical orbit since the last data upload to sync its clock. It’s a messy business but can be simplified. We’d leave it at that. See ICD-GPS-200C, Section 20.3.3.3.3.1, if you want to see how it is implemented in your GPS receiver.
There is more to relativity than the special theory and general theory. There is the Sagnac effect associated with our rotating reference frames attached to Earth, in which we’d like to determine a position. The principle of constancy of the speed of light cannot be applied in a rotating reference frame, where the paths of the radio rays are not straight lines, but spirals. (Receivers at rest on Earth are moving quite rapidly: 465 meters per second at the equator.) There is also the Shapiro delay associated with the slowing of electromagnetic waves as they near Earth, which amounts to a fraction of a nanosecond. See the refer-ences for more on these topics.
Final thought: Could Einstein have imagined one hundred years ago that a bil-lion people would unknowingly account for the effects of his esoteric theory in their everyday activities?
Refrences
Ashby (1993), “Relativity and GPS,” Innovation column in GPS World
The Radio Technical Commission for Aeronautics (RTCA) has released a six-file document titled “DO-401 Minimum Operational Performance Standards (MOPS) for Dual-Frequency Multi-Constellation Satellite-Based Augmentation System Airborne Equipment.”
The document is designed to support validation of airborne requirements when using dual-frequency GPS, Galileo and satellite-based augmentation system (SBAS) signals as defined by International Civil Aviation Organization Standards and Recommended Practices (Annex 10, Volume I, Amendment 93), as well as the development of dual-frequency multi-constellation SBAS services.
The SBAS MOPs document does not provide specifications for a production approval.
The RCTA stated that a future release of the document will provide requirements supporting production approval, typically through a new Technical Standard Order or European Technical Standard Order.
According to Rokubun — a Spanish company that designs accurate and scalable navigation solutions based on GNSS — released a library solution for decoding and processing Galileo Open Service Navigation Message Authentication (OSNMA) for embedded platforms.
The solution is part of the Horizon Europe BANSHEE project, for which Rokubun served as the coordinating, is EU-funded, and is supported by the European Union Agency for the Space Programme (EUSPA). The goal of the project was to develop a hybrid technology that combines Wi-Fi ranging and satellite navigation (including the Galileo OSNMA) to allow for accurate and seamless indoor-outdoor navigation.
The upcoming Galileo OSNMA will provide authenticated navigation data message against data-level spoofing attacks. By delivering data authentication, the free-to-use Galileo OSNMA assures users that the received Galileo navigation message comes from the system itself and has not been modified by, for example, a spoofing attack.
To address this risk, Rokubun’s library enables the Galileo OSNMA in embedded GNSS solutions. The cross-platform, small-footprint library has undergone extensive testing using official EUSPA test vectors, and all OSNMA algorithms have been validated in real conditions at the European Commission’s Galileo testing facilities located at the Joint Research Centre in Ispra, Italy.
The library is organized to be portable, requiring only a working assembler and C compiler that supports ISO C99. To ensure optimal performance and validate user-specific enhancements, such as the utilization of cryptographic accelerators or other system-on-chip/microcontroller specific resources, Rokubun has implemented a hardware-in-the-loop continuous integration/deployment setup.
This setup continuously tests the library against several reference MCU targets, assessing its performance and guaranteeing its reliability.
“Is the GNSS community failing to exploit the potential of chip-scale atomic clocks (CSAC)?”
John Fischer
“Yes! And there are several CSAC suppliers, each with varying accuracies, power consumptions, and price points. These atomic clocks are no longer exotic scientific instruments but rather commercialized, proven devices that can be mounted on a circuit card at a reasonable cost. They offer extended holdover time in the absence of GNSS and help with spoofing detection by verifying the incoming signal. They provide exact frequency recovery on power-up (re-trace) for power saving modes. Defense, telecom, financial transactions, and autonomous navigation for cars and drones are all applications that can be made more resilient by these clocks.”
“Atomic clocks, including CSAC, are frequently used in GNSS timing applications, for example to keep accurate time during GNSS outages or to assist in identifying spoofing attacks targeting the time component. On the other hand, the long-term stability of atomic clocks is not particularly relevant in navigation applications where time is not the main output, and the additional cost, power consumption and size of CSAC are not justified.”
“Indeed. After the DARPA-NIST initiative and subsequent commercialization, affordable, accurate and stable chip-scale oscillators can be easily integrated into circuit boards providing additional measurements to PNT systems to improve positional vertical accuracy, as well as reliability and integrity. For example, in high-end mobile mapping systems operating in complex urban scenarios, their use helps detect GNSS outliers at a relatively negligible additional cost.”
The European Union Aviation Safety Agency (EASA) has certified Madrid-based European Satellite Services Provider (EESP) as a pan-European communication services provider for Iris data link services.
Iris, a project supported by the European Space Agency (ESA) and various European partners, aims to develop a satellite-based air-ground communication system to enhance air traffic management. By 2028, Iris will enable full 4D trajectory management of airspaces globally, making it a crucial means of communication between cockpit crews and controllers.
The certification of ESSP as an Iris data link services provider comes after more than a year of testing and audits at both ESSP and Inmarsat premises. The certification establishing compliance with relevant regulations and associated industrial standards for data link services.
Additionally, ESSP recently signed a long-term contract with Viasat/Inmarsat to act as the Service Provider for Iris data link services, powered by Viasat’s SwiftBroadband Safety (SB-S) connectivity. As The European Geostationary Navigation Overlay Service (EGNOS) service provider, ESSP is already under a long-term contract with the European Agency for the Space Program (EUSPA), where it carries out EGNOS operations and maintenance.
Iris is scheduled to be fully operational in Europe by 2024, providing services to airlines such as easyJet and ITA Airways. ESSP will lead the commercialization of Iris services, targeting European Air Navigation Service Providers (ANSPs). The service provision consortium includes ESSP SAS, Inmarsat, and SITA, with other communication network providers expected to join in the future.
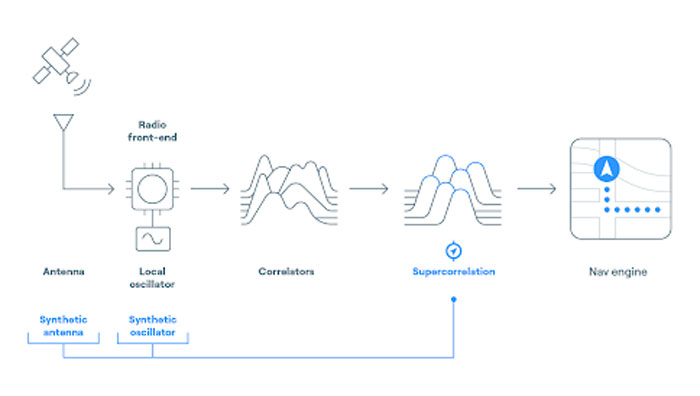
FocalPoint has added new functionality to its Supercorrelation technology, S-GNSS, to simplify the integration process for chipset companies.
The company has introduced an API interface between a GNSS chipset and an application or operating system that runs on its own navigation engine, easing deployment of Supercorrelation.
Based on the existing Android open-source interfaces, the S-GNSS API will allow a normal GNSS chipset to run S-GNSS in a separate external host processor. With this additional software added to the GNSS chipset, the overall system can get the performance improvements necessary to upgrade the GNSS receiver to a S-GNSS receiver and offer enhanced positional capabilities.
The S-GNSS API outputs the multipath-free line-of-sight correlation peak for each satellite and the corresponding corrected frequency, codephase and status flags. Optional outputs can be enabled with turn-on keys, spoofer detection and localization, and instantaneous magnetic-free heading estimation.
Supercorrelation has recently been awarded the National Technology award for Security Innovation of the Year and is recognized by the UK Royal Institute of Navigation and the Institute of Navigation. This development is the latest technical upgrade for the S-GNSS product portfolio.
NVS-01 is the first second-generation satellite of the Indian Navigation Satellite System (IRNSS), also known as Navigation with Indian Constellation (NavIC). It was launched into geostationary orbit on May 20. The satellite is placed at 129.6° eastern longitude and will finally replace IRNSS-1G launched in April 2016.
Whereas the first-generation satellites transmit navigation signals in the L5- and S-band, NVS-01 is the first IRNSS satellite also transmitting in the L1-band. The 1547.42 MHz frequency is also used by other satellite navigation systems, including GPS, Galileo, and BeiDou-3. However, a different modulation is used, namely a Synthesized Binary Offset Carrier (SBOC) signal. The IRNSS L1 SBOC signal has data and pilot components with and without navigation data. Data and pilot signals consist of BOC (1,1) and BOC (6,1) components with sub-frequencies of 1.023 MHz and 6.138 MHz. A quadrature multiplexing is applied for the data and pilot components with a power sharing of 41.82% and 58.18%. The navigation message on the IRNSS L1 signal has a different structure compared to those on the legacy L5- and S-band signals. The new L1 navigation message uses an advanced frame structure and forward error correction inherited from the CNAV-2 message of the GPS/QZSS L1C signal as well as a similar orbit model. Among other things, it provides inter-signal corrections for the L1 data and pilot signals with reference to the S band signal for single-frequency L1 band users.
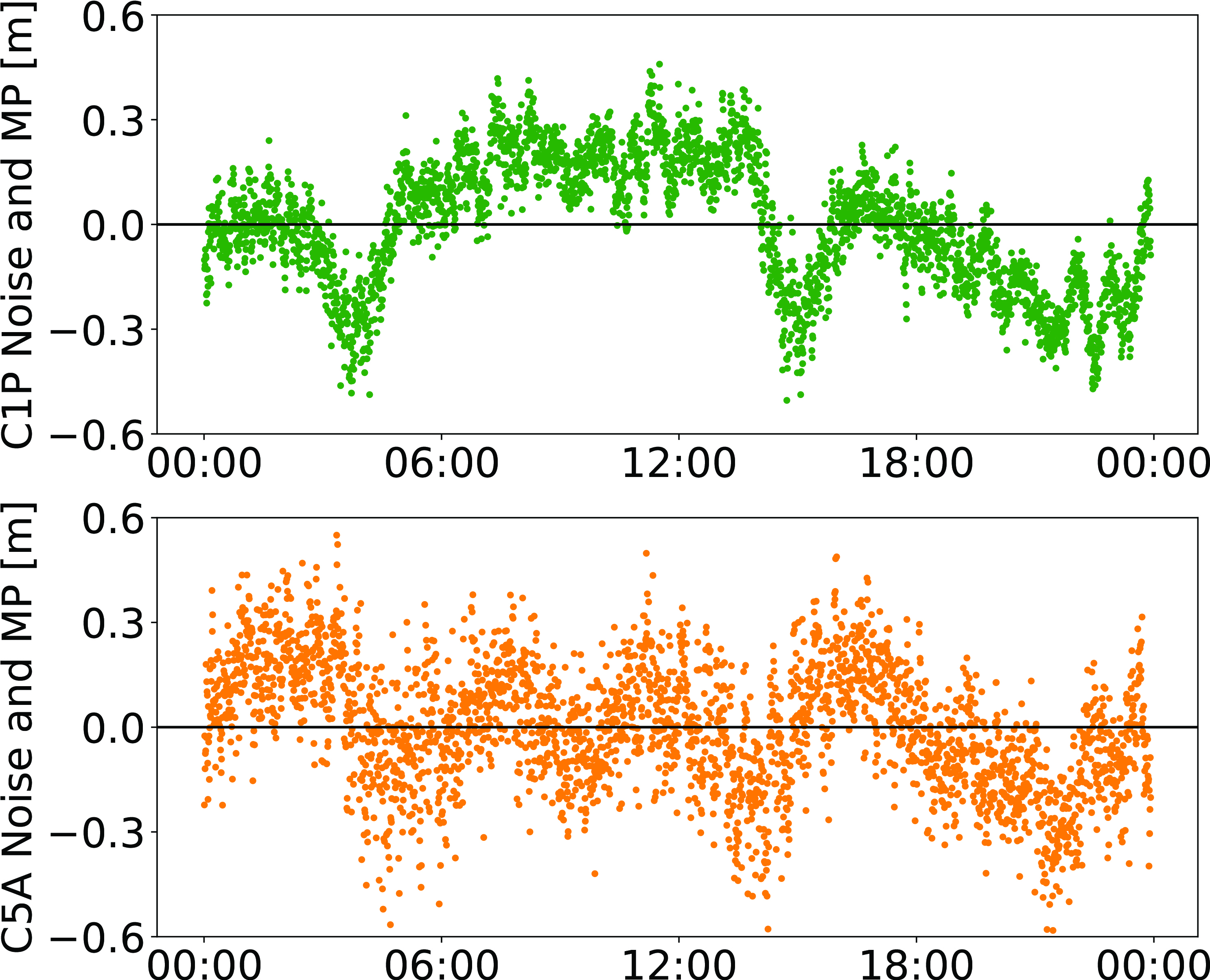
NVS-01 started signal transmission on June 17, 2023, with the pseudo-random noise (PRN) code I10. The satellite’s L1 and L5 signals were tracked by a Septentrio PolaRx5 receiver located in Tokyo, Japan, with a prototype firmware that is capable of tracking the L1 pilot signal. Figure 1 shows the multipath linear combination of NVS-01’s L1 and L5 pilot signals. Whereas the short-term variations are smaller for L1 compared to L5, the overall RMS is 18 cm for both signals.
Figure 1: Noise- and multipath linear combination for NVS-01’s L1 and L5 pilot signals received on 26 June 2023. (Image: All figures provided by the authors)
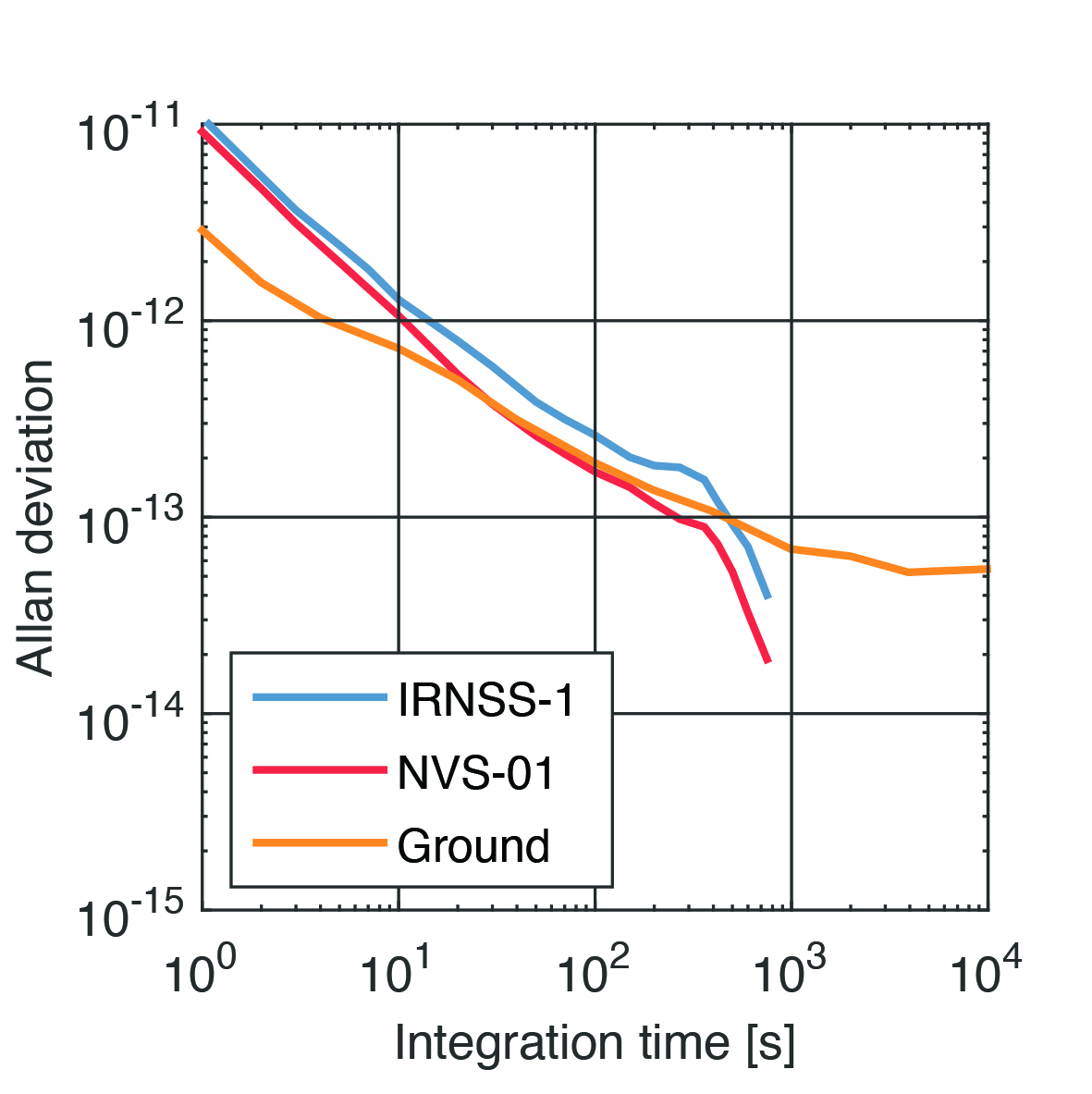
Whereas IRNSS-1’s rubidium clocks were provided by Spectratime, NVS-01 is the first satellite operating a new type of rubidium atomic frequency standard (RAFS) developed in India. The short-term performance of GNSS satellite clocks can be evaluated with the one-way carrier phase method. The receiver is connected to a highly stable external clock, e.g., a hydrogen maser. Thus, the receiver clock error is negligible. Measurement biases as well as the delays of ionosphere and troposphere on short time scales are removed by fitting a fourth-order polynomial. If no external clock is available, as is the case for the station in Tokyo, the precise clock information can be transferred from another station by a reference satellite jointly tracked by both receivers.
The Allan deviation based on this three-way carrier phase (TWCP) analysis is shown in Figure 2. The hydrogen maser of the IGS station USUD in Usuda, Japan, is used as the reference clock. At short integration times up to 20 s, the Allan deviation computed from the TWCP analysis is dominated by the GNSS measurement noise hiding the true clock performance. Above 20 s, the TWCP demonstrates that the NVS-01’s RAFS stability meets the performance of the ground tests and even exceeds them for longer integration times. At all integration times, the new RAFS outperforms the first generation IRNSS clocks.
Figure 2: IRNSS clock performance obtained from three-way carrier phase analysis as well as ground tests.
Manufacturers
GNSS data used in this article were collected with a Septentrio PolaRx5 receiver.
Peter Steigenberger and Oliver Montenbruck are scientists at the German Space Operations Center of the German Aerospace Center (DLR), where they conduct research in the field of new satellite navigation systems.
Jean‑Marie Sleewaegen is Lead Architect at Septentrio, Belgium, where he has been responsible for GNSS signal processing, system design and technology development since the company’s inception in 1999.
Space Systems Command (SSC), the National Reconnaissance Office (NRO), United Launch Alliance (ULA) and their mission partners successfully launched the “Silent Barker”/NROL-107 mission aboard an Atlas V rocket September 10, 2023, at 8:47 a.m. EDT from Space Launch Complex (SLC)-41 at Cape Canaveral Space Force Station, Florida.
The spacecraft was part of the Space Force’s Silent Barker satellite constellation network intended to provide space situational awareness, orbital surveillance and tracking.
According to a statement by ULA, Silent Barker is designed to detect and maintain custody of space objects. This capability enables indications and warnings of threats against high-value assets in geosynchronous orbit.
The mission aims to serves the needs of the U.S. Department of Defense and intelligence community by providing the capability to search, detect and track objects from a space-based censor for timely custody and event detection, the company said.
Surveillance from space allows the government to overcome existing ground sensor limitations and will enable the collection of timely satellite metric data around the clock.
One more Atlas V 551 remains in the NSSL inventory as the Space Force approaches the end of Atlas.