EUSPA has signed a Framework Contract with Thales Alenia Space to build the European GNSS Service Demonstrator (ESD), a centralized modular platform advancing EU Space services like EGNOS, Galileo, Copernicus, and GOVSATCOM/IRIS2.
This EGNSS Service Demonstrator is a key innovation accelerator for EUSPA, paving the way for large-scale end-to-end testing future Galileo and EGNOS augmentation services through both geostationary satellite and internet-based dissemination.
The system will serve as the backbone of pre-operational EGNSS service validation, anticipating future positioning, navigation and timing (PNT) user needs across critical markets, support standardization activities, and sustain EUSPA’s commitment to service excellence.
Building on Thales Alenia Space’s track record in PNT satellite-based services, the EGNSS Service Demonstrator project inherently anchors Thales Alenia Space at the forefront of the new generation of GNSS-based applications and services for millions of European and global users.
Capabilities
The ESD will comprise modular and flexible ground and support segments to handle a diverse number of reference stations and data. It will be able to compute corrections, messages or data that will be disseminated in real-time via different means such as GEO SiS and the internet.
It centralizes EGNSS demonstrations, incorporating future services like high accuracy (HAS), authentication (OSNMA, SAS), maritime/rail DFMC safety, space weather and emergency warning via scalable infrastructure.
Strategic role
The ESD will facilitate the seamless rollout of new/improved services without disrupting operations of current EGNSS services, emulating signals for realistic testing to support future prototyping and standarization of receivers (such as for rail safety or automotive high-accuracy units), and app development. It will refine user needs across sectors while engaging users and developers.
Key use cases
The main use cases that the ESD will cover are:
Early Open Service signals, such as pre-operational EGNOS DFMC SBAS or Galileo HAS integrity, to accelerate user readiness.
Service consolidation for evolutions like enhanced HAS via E-GSC interface, OS-NMA/SAS testing, and sector-specific apps (maritime, rail).
Standardization support for receivers like MUGG, EDG2E and Fundamental Elements projects; SBAS promotions and demos.
With the European GNSS Service Demonstrator, EUSPA strengthens Europe’s ability to test, evolve and deploy future EU Space services, supporting innovation, standardization and market uptake while ensuring service continuity and resilience.
We just finished the year that marked the 30th anniversary of America’s Global Positioning System (GPS) reaching full operational capacity. What began as a military tool to enable U.S. military forces to navigate more precisely and to support the use of precision strike weapons anywhere in the world has become the invisible infrastructure that powers nearly every aspect of civilian life. So much of our everyday lives, from smartphones and ATMs to aviation, shipping and Wall Street, run on precise timing and location information.
However, that infrastructure is now under duress. Our adversaries are waging a sophisticated war on GPS signals, and the fallout is both significant and frightening. Reports of navigational issues across the Baltic and the Middle East have become a daily occurrence due to conflicts in the region. The impacts have extended into civilian life, impacting air, land and sea.
It’s a miracle the regions have avoided a major aviation disaster, given that navigational warfare and space have become new domains of nation-state confrontation. Russia is spoofing and jamming signals across Eastern Europe. Russia and China are also shadowing military and civilian satellites, performing dangerous dogfighting maneuvers in orbit.
Jamming and spoofing were once rare. Now, they are battle-tested tools in the electronic warfare arsenal, and the U.S. is not immune to their effects. What’s happening in these regions today could happen over Chicago or Atlanta tomorrow.
Similar interference has been detected near major U.S. airports, including Dallas and Denver, impacting nearly 350 flights. Nation-states were not responsible for these incidents, but they prove how vulnerable GPS is to disruption.
This isn’t a Hollywood thriller. A coordinated attack on GPS would ripple across aviation, finance, emergency response, and daily life within minutes, not days. We’ve already seen how quickly systems collapse when digital links are severed.
In 2022, a volcanic eruption in Tonga severed the country’s only undersea cable and blocked satellite signals, plunging the island into an instant blackout. Commerce broke down, and government emergency coordination collapsed. ATMs couldn’t dispense cash because banks couldn’t confirm account balances. Cargo planes couldn’t file manifests, and supply chains froze. Farms and fisheries couldn’t complete online forms, so produce rotted. Pharmacies couldn’t fill prescriptions because their supply systems were offline. The effects were immediate and took months to normalize.
If GPS goes down, whether because of jamming, spoofing, a cyberattack or a natural disaster America is dangerously unprepared. Our widespread reliance on a vulnerable technology should be a wake-up call. A single sustained outage could cost the U.S. economy an estimated $1.6 billion per day.
When I served as commander of U.S. Cyber Command, our team was responsible for ensuring the networks underpinning our military missions were fully operational and secure, and as the director of the National Security Agency, the team was focused on generating deep knowledge of threats to the U.S. and allied operations across land, sea, air, space and cyberspace. In both roles, it became very clear that we needed to protect our positioning, navigation and timing infrastructure, and that one of the keys to doing so was to create layered resilience.
Solving a problem of this magnitude is a massive challenge. But we don’t need to start from scratch. By leveraging existing infrastructure in space and on the ground, we can accelerate deployment, reduce cost and avoid duplication. Speed and scale are essential. It’s not a question of whether the U.S. experiences a major GPS disruption, but when.
Fortunately, the technology already exists. American companies are developing methods to provide positioning, navigation and timing backup via terrestrial 5G networks, offering timing and location signals that are independent of satellites. These solutions are scalable, cost-effective and designed to integrate directly into existing telecom infrastructure such as cell towers. If commercial providers are already exploring complementary backup technologies, why are we still lagging behind our adversaries?
The real barrier isn’t technology — it’s policy. Moving the process forward to make these technical capabilities a reality is the challenge. Getting government bureaucracies to act with urgency is never easy, but the administration and Congress now recognize the stakes.
The Federal Communications Commission has launched an inquiry into strengthening national positioning, navigation and timing infrastructure, including exploring ground-based alternatives such as 5G-powered systems. Now it’s time to follow through and move from planning to execution.
The threats are real; the technology is ready; and the cost of inaction grows by the day. Replacing GPS is not a realistic near-term solution, either in terms of cost or the time frame required to do so. Our focus should be on building a layered, resilient system that provides users with multiple options to react to loss or degradation of our current positioning, navigation and timing structure. One layer of that system should be a ground-based component that takes advantage of the existing infrastructure already in place, saving us significant time and money in creating a solution to this critical problem.
Ionospheric delay remains a significant error source in GNSS positioning, particularly for single-frequency users and during periods of enhanced space weather activity (Dabbakuti, 2021). While global and regional ionospheric models provide large-scale corrections, they often fail to represent localized ionospheric variability at individual receiver locations (Jee et al., 2010; Osanyin et al, 2025).
Consequently, residual ionospheric errors persist in positioning solutions, degrading accuracy for applications including precise point positioning (PPP), real-time navigation, and single-frequency GPS users (Biswas et al., 2022). Hence, accurate modeling of the ionosphere is essential in tackling the principal challenges in high-precision GNSS positioning.
Vertical total electron content (VTEC), a key driver of ionospheric delay, exhibits strong nonlinear temporal variability controlled by solar radiation, geomagnetic activity, seasonal effects, and local electrodynamics (Osanyin et al., 2023; Seemala et al., 2023). Capturing this variability at individual GNSS stations poses a significant challenge. Advances in artificial intelligence (AI), i.e., machine learning (ML) techniques have emerged over the decades as powerful tools for approximating complex non-linear systems and deterministic geophysical processes, while significantly reducing computational cost (Sarker, 2021). As such, they have successfully replaced repeated full-scale numerical simulations by learning input-output relationships directly from data (Zhang et al., 2025). This paradigm shift is particularly relevant for ionospheric modeling, where long-term GNSS observations provide rich time series well suited for data-driven learning.
Time series forecasting traditionally relies on statistical models such as autoregressive (AR), moving average (MA), autoregressive moving average (ARMA), and autoregressive integrated moving average (ARIMA), which model future values as linear functions of past observations (Kaselimi et al., 2020). They have been widely employed to predict VTEC by extrapolating historical observations. Nonetheless, the classical approaches are inherently limited by assumptions of linearity, stationarity and short-term memory, which restrict their ability to capture complex ionospheric dynamics, particularly during disturbed conditions and over longer prediction horizons. To address these limitations, this study adopts a deep learning-based framework using long short-term memory (LSTM) neural networks for station -pecific VTEC prediction. Unlike conventional statistical models, LSTM networks are specifically designed to learn non-linear temporal relationships and retain long-term memory in sequential data (Hochreiter and Schmidhuber, 1997).
Essentials
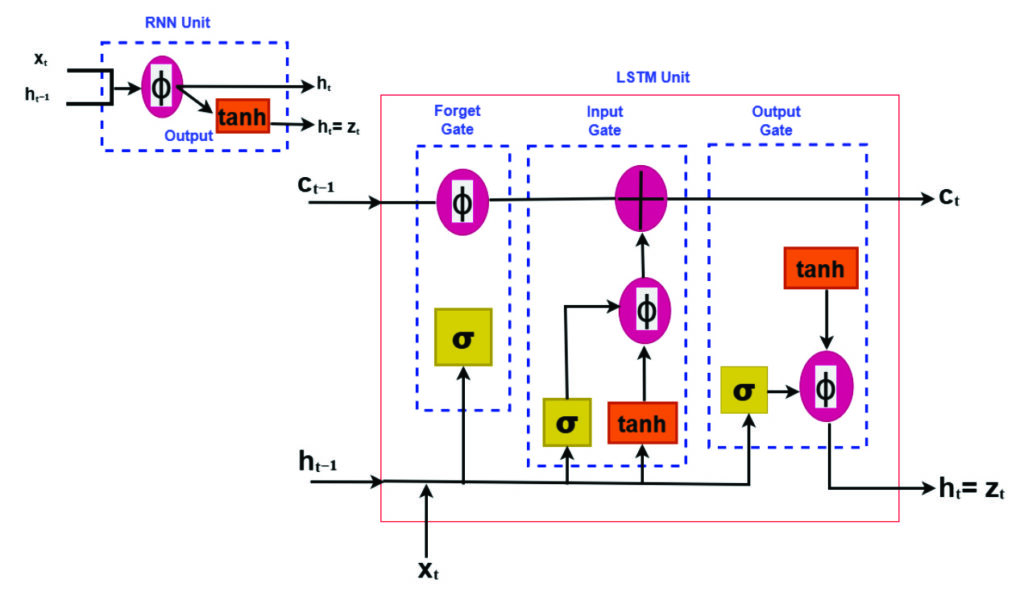
LSTM neural networks for prediction have emerged as a powerful tool for time-series prediction (Hochreiter and Schmidhuber, 1997). LSTM is a type of recurrent neural networks (RNNs) that takes sequences of information and uses recurrent mechanisms and gate techniques (see Figure 1). RNNs are well known for their ability to process single data points and entire data sequences (Gonzalez and Yu, 2018). The LSTM model has various forms for different types of data inputs. The basic condition of LSTM modeling is that all inputs and outputs are independent of each other. The key to the LSTMs is the cell state, which is protected and controlled by the forget, input and output gates, respectively (Gonzalez and Yu, 2018).
FIGURE 1 Comparison of recurrent neural network (RNN) and long short-term memory (LSTM) structures.
Training deep learning modelsremains computationally demanding despite their fast prediction capability. LSTM networks consist of interconnected layers with numerous trainable parameters that must be optimized iteratively to accurately capture temporal dependencies in the data. Training typically involves large historical datasets spanning multiple years, which is necessary to expose the model to varying ionospheric conditions, but also increases computational effort (Thompson et al., 2020). The optimization process relies on iterative algorithms such as stochastic gradient descent and variants, requiring repeated forward and backward passes through the network. As the depth of the model and the length of input sequences increase, so does the demand for memory and processing power. These challenges are particularly relevant when training is performed using graphics processing units (GPUs), where memory limitations and data transfer overhead must be carefully managed (Sarker, 2021).
Like all neural networks, LSTM has trainable parameters (weights and biases). These parameters are optimized by minimizing a loss function using gradient-based optimization. Due to its ability to learn time sequences, gradients must be propagated across time steps, not only across layers. This process is accomplished using backpropagation through time, which computes gradients of the loss with respect to all parameters and accumulates gradients across the sequence. The major advantage of LSTM is the use of its gating mechanism in mitigating vanishing gradients, making backpropagation practical for long time series such as VTEC (Adekunle et al., 2025; Hochreiter and Schmidhuber, 1997; Noor and Ige, 2025).
In recent years, LSTM networks have achieved impressive results in modeling complex physical systems characterized by strong non-linearity and long-term temporal dependencies. Notably, LSTM-based approaches have been successfully applied to atmospheric and geophysical time series, demonstrating superiority in predictive skill compared to traditional empirical and statistical models (see Reddybattula et al. (2022 and references therein). These research results show the capability of LSTM to capture diurnal, seasonal, and storm-time variations. By leveraging historical GNSS-derived VTEC time series, LSTM-based models can adaptively capture both regular ionospheric patterns and transient disturbances, enabling more accurate and robust VTEC forecasts. This data-driven approach directly supports improved ionospheric correction in GNSS positioning, offering a practical and scalable solution to overcome the shortcomings of traditional time series methods.
This study focuses a station-specific vertical total electron content (VTEC) prediction framework based on long short-term time series. The proposed framework treats VTEC prediction as a supervised regression problem. A sequence of past VTEC observations is used to predict future values over one or multiple forecast horizons. Also, emphasis is placed on methodology clarity, practical implementation, and positioning relevance.
Elements: TEC estimation from GNSS measurements
For the purpose of forecasting local VTEC using time series analysis, this study utilized the GPS dataset provided by the Brazilian Institute for Geography and Statistics (RBGE; www.ibge.gov.br/en/) over Santa Maria (SMAR; -20.72o, 306.28o), a station located in Brazil over the period of 10 years from January 2010 to December 2019.
VTEC data were derived from dual-frequency GPS observations at the selected station using the standard ionospheric processing techniques, including slant TEC estimation, instrumental bias correction, and mapping to vertical TEC. For more details, readers can consult the GPS-TEC analysis software developed by Seemala and Valladares (2011), which has been employed in this study for TEC processing. The time resolution is selected to be 15 minutes following an average over a sampling interval of 30 seconds. The resulting VTEC time series provides a continuous record of ionospheric variability with a fixed temporal resolution.
Station-specific LSTM modeling framework
A structured deep learning workflow for station-specific VTEC prediction has been adopted using the LSTM framework. The overall methodology follows a sequential pipeline consisting of data collection, preprocessing, feature engineering, model training, evaluation, validation, and deployment. This workflow ensures reproducibility, minimizes information leakage, and facilitates integration into GPS positioning engines. The focus is on time series learning at a single station, where temporal dependencies dominate and spatial smoothing from regional or global models is undesirable.
Data preparation and model training
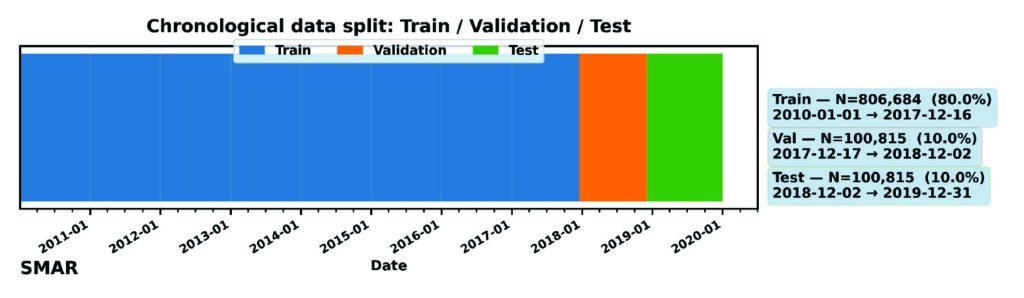
High-quality input data are essential for stable LSTM training. The extracted VTEC time series are preprocessed to remove cycle slips, mitigate differential code biases, and ensure consistent temporal sampling. As shown in Figure 2, for this model (as variations can be considered), the dataset has been divided into training (80%), validation (10%), and testing (10%). The validation is mostly required during training the LSTM deep learning model to ensure generalization and prevent overfitting. Furthermore, preprocessing aims at ensuring capability of the model in handling missing data and temporal consistency checks.
FIGURE 2 Chronological splitting of VTEC dataset for machine learning.
Feature engineering mainly converts raw VTEC observations into structured model inputs such as local time (LT) and day-of-year (DOY) features. These features are normalized prior to training, although normalization is applicable to only the training dataset to avoid future leakage. The model consists of an input layer whose dimension equals the number of input features, followed by a single LSTM layer with 64 memory cells to learn temporal dependencies in the input sequence. A dropout layer with a rate of 0.2 is applied to mitigate overfitting during training. The LSTM representation is then passed to a fully connected (Dense) regression head with nout neurons, where nout equals the number of forecast lead times. Model training minimizes the Huber loss function using gradient-based optimization, while performance is evaluated using RMSE. The optimizer updates the network weights iteratively to reduce the forecast error across the training samples. Early stopping and regularization are applied to further prevent overfitting, particularly during periods of low ionospheric variability. The final outputs are the predicted VTEC at multiple lead times (in this experiment: 30, 60, 120 and 180 minutes). The trained model is suitable for deployment in near real-time ionospheric correction systems: once operational, it ingests the most recent VTEC observations and produces short-term forecasts that can be integrated into GNSS positioning workflows, particularly for single-frequency applications and PPP.
Performance evaluation and baseline comparison
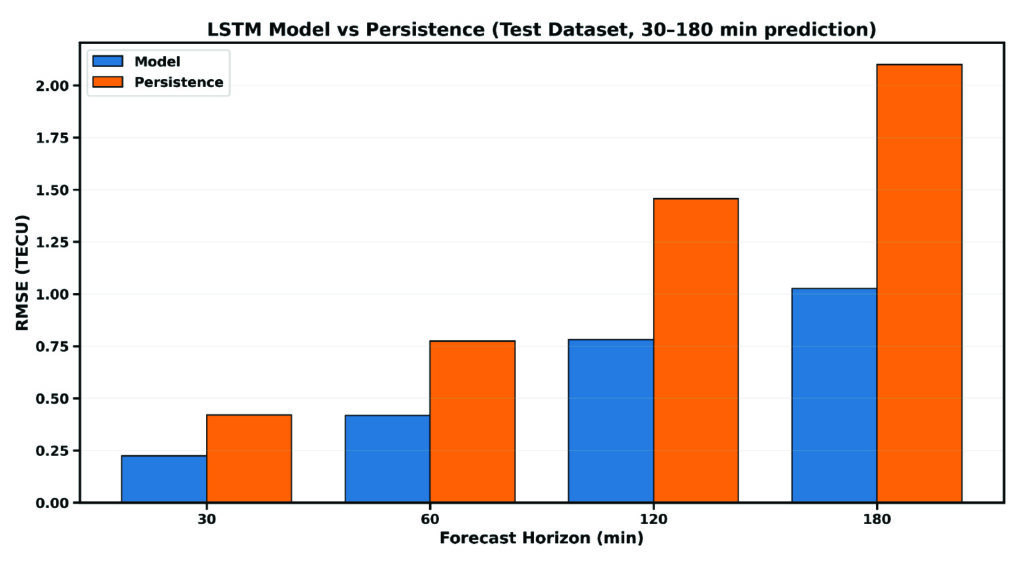
For practical assessment, the LSTM-based predictions are evaluated against commonly used baseline models, including persistence (using the trained model with new data) and skill (the ability of the model to make predictions). These baselines represent the minimum performance expected in operational GNSS ionospheric modeling and serves as internal validation of the overall model’s performance. Evaluation metrics include, but are not limited to, root mean square error (RMSE), mean absolute error (MAE), and relative improvement over persistence (skill). Figure 3 compares the predictive performance of the proposed LSTM model against the persistence baseline on the independent dataset. RMSE increases over time, while persistence largely deviates from the LSTM model, showing the great strength and capability of the LSTM model for time series prediction over the Santa Maria station. For instance, the RMSE of the LSTM model increases from 0.24 TECU to 1.15 TECU from 30 minutes to 3 hours lead time, while that of persistence ranges from 0.41 TECU to 2.25 TECU, respectively.
FIGURE 3 Comparison between the RMSE of the LSTM model and persistence for single-station VTEC prediction.
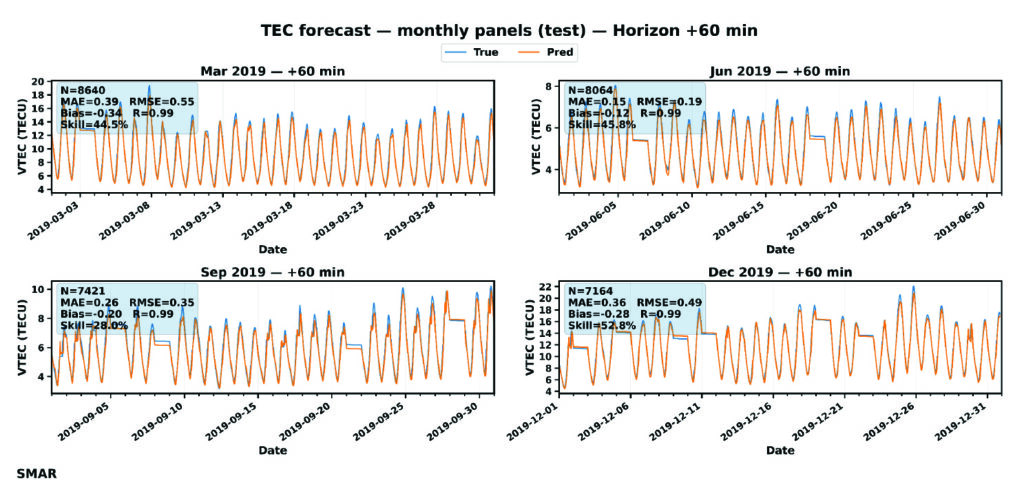
For further evaluation, day-to-day variation of VTEC at 60 minutes lead time is shown in FIGURE 4. GPS TEC (orange curves) shows a strong diurnal cycle with expected daily peaks, while forecast (blue curves) matches these peaks across months, indicating that the LSTM captures the key deterministic component of TEC variability. TABLE 1 or the embedded metrics in Figure 4 summarizes an overall accuracy of the LSTM model using the performance metrics: MAE, RMSE, Bias, R, and skill. MAE and RMSE values change with season — with the lowest reported in July.
FIGURE 4 Day-to-day variation of VTEC at 60 minutes forecast during July to December 2019. The embedded metrics show the performance of the LSTM model for each month of the testing dataset.
Error increases toward December with the largest RMSE in March (0.549 TECU). September shows moderate error levels. Also, correlation is consistent across all months, which confirms the model’s capability to capture TEC changes and day-to-day variability patterns. The model is nearly unbiased as the bias is consistently close to zero, meaning that the LSTM does not drift systematically and shows that the model underpredicts GPS VTEC. This characteristic is important for operational GNSS corrections, because biased VTEC forecasts would translate to persistence positioning errors. Going by the skill values, even at 60 minutes forecast, the model provides ~27%-52% improvement over persistence. This result implies a major indicator of real predictive ability, especially for GNSS applications.
Statistical validation
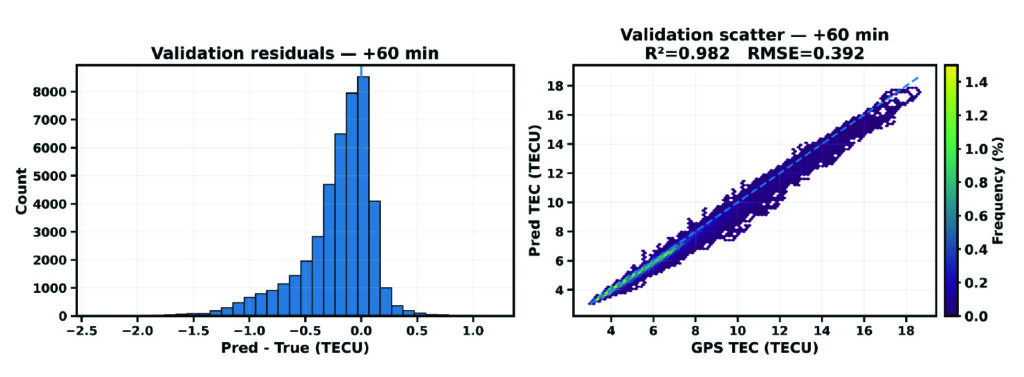
Figure 5 presents the diagnostic of the validation dataset for the SMAR station at a 60-minute forecast horizon. It combines the distribution of prediction residuals (left) and density-based scatter comparison between predicted and observed VTEC values. These analyses help explain the overall agreement of the LSTM model forecast during validation.
FIGURE 5 Validation diagnostics at 60 minutes forecast horizon. (Left) Histogram of prediction residuals. (Right) Density scatter of predicted versus observed TEC.
The residual distribution is mostly concentrated near zero, which implies that most predictions deviate only slightly from observations. The right plot shows the scatter density plot of predicted VTEC against observed GPS VTEC. The points are tightly clustered along the dashed line, indicating that the model corresponds very well (98.2%) to the TEC variance in the validation period. Also, a RMSE of 0.39 TECU reflects a relatively low magnitude error. These findings support the reliability of the proposed LSTM model for VTEC forecasting.
Implications for GNSS Positioning
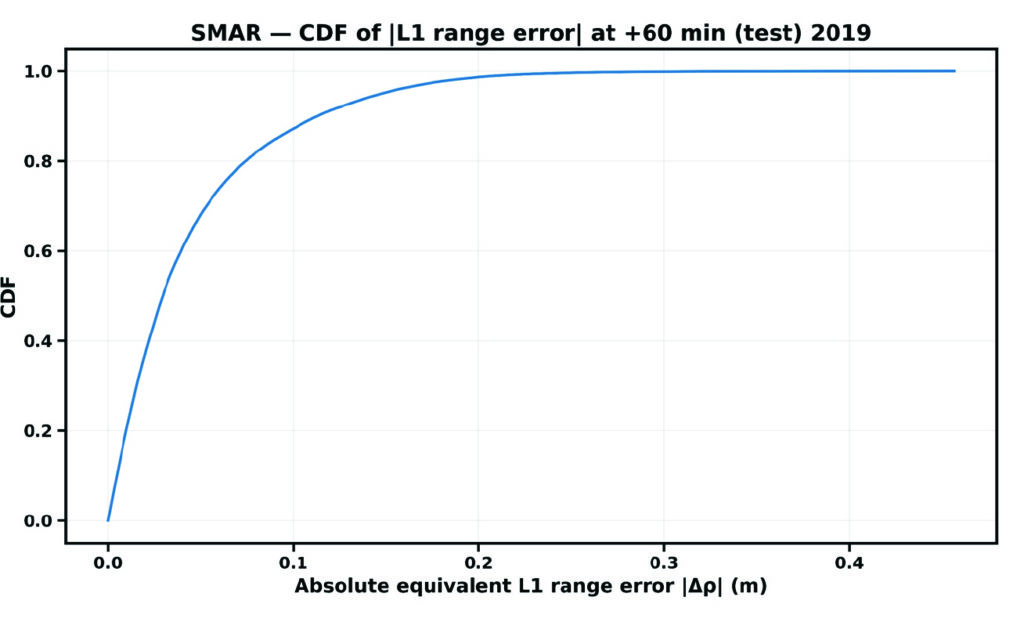
The cumulative distribution function (CDF) of the absolute equivalent L1 error, denoted by |∆ρ|, for the Santa Maria station at a forecast horizon of 60 minutes is shown in Figure 6.
FIGURE 6 CDF of residual VTEC equivalent L1 ranging error at the single station.
The CDF provides a direct positioning-relevant interpretation of model performance. The steep rise at small error values indicates that most samples exhibit low residual range errors, demonstrating strong correlation performance.
Evolutionary
This study demonstrates that LSTM-based machine learning provides a practical and effective approach for station-specific GNSS VTEC prediction during low solar activity. The LSTM model accurately reproduces diurnal and seasonal VTEC variability at the station level. Forecast skill remains stable across increasing horizons, while significant RMSE reductions over persistence confirm the model’s predictive value, supporting the feasibility of LSTM-based station-specific VTEC forecasting for operational GNSS applications. By leveraging historical GPS-derived VTEC time series, LSTM neural networks capture complex temporal dependencies that are difficult to model using conventional techniques. This approach offers a valuable complement to existing ionospheric correction models and represents a promising direction for future GNSS positioning systems. The results presented in Table 1 confirm that the proposed LSTM algorithm can derive an accurate predictive model as far as a 3-hour forecast. The proposed approach improves long-term ionospheric prediction and enhances positioning accuracy.
Month
MAE (TECU)
RMSE (TECU)
Bias (TECU)
R
Skill
Mar
0.39
0.55
-0.34
0.993
44.5
June
0.15
0.18
-0.12
0.994
25.8
Sep
0.26
0.35
-0.20
0.986
28.0
Dec
0.36
0.49
-0.28
0.994
52.8
Table 1 Comparison of VTEC performance metrics of the LSTM model at 60 minutes forecast.
While the results demonstrate the potential of AI-based modeling for station-specific VTEC prediction, further investigation is required to assess its limitations. Future research will investigate the sensitivity and robustness of the data-driven approach under extreme geomagnetic storm conditions and maximum solar activity considering multiple stations over the same region. These experiments will help evaluate the LSTM-based modeling reliance for a better positioning GPS accuracy. In addition, combining efficient training strategies with LSTM-based temporal learning offers a practical and scalable solution to station-specific VTEC prediction. The resulting models will bridge the gap between computationally expensive physics-based approaches and overly simplified empirical models, providing accurate, localized ionospheric corrections that directly enhance GPS positioning performance. Therefore, the Bayesian optimization technique would be integrated during model’s training to tune LSTM hyperparameters (Adekunle et al., 2025), with the aim of reducing computational cost and improving convergence and generalization in station-specific ionospheric modeling. It is very likely that machine learning will play a significant role in near-term ionospheric modeling/prediction for GNSS.
Dr. Taiwo Osanyin is a Ph.D. visitor at York University, Toronto, Canada. Her research interests include space physics, atmospheric sciences, statistics, and modeling of the upper atmosphere. Osanyin received a Ph.D. in space geophysics from the National Institute for Space Research, Brazil, an M.Sc. in nuclear science and engineering from Obafemi Awolow University, Nigeria, and a B.Sc. in engineering physics from Obafemi Awolow University, Nigeria.
Sunil Bisnath is a full professor in the Department of Earth and Space Science and Engineering at York University in Toronto. For more than 25 years, he has been actively researching precise GNSS-focused positioning and navigation solutions and applications. He holds an Honors Bachelor of Science degree and master of science degree in surveying science from the University of Toronto and a Ph.D. in geodesy and geomtics engineering from the University of New Brunswick.
• Adekunle AA, Fofana I, Picher P, Rodriguez-Celis EM, Arroyo-Fernandez OH, Zemouri R. (2025). Optimizing deep learning predictive models: A comprehensive review of RNN and its variant architectures. Applied Soft Computing. Oct 9:114015.
• Biswas T, Banerjee P and Paul A (2022). Impact of low-latitude ionospheric effects on precise position determination. Radio Science, 57(4): 1-11.
• Dabbakuti JK (2021). Modeling and optimization of ionospheric model coefficients based on adjusted spherical harmonics function. Acta Astronautica, 182: 286-294.
• Gonzalez J and Yu W (2018). Non-linear system modeling using LSTM neural networks. IFAC-PapersOnLine, 51(13): 485-489.
• Hochreiter S and Schmidhuber J (1997). Long short-term memory. Neural Computation, 9:1735-1780.
• Jee G, Lee HB, Kim YH, Chung JK, Cho J (2010). Assessment of GPS global ionosphere maps (GIM) by comparison between CODE GIM and TOPEX/Jason TEC data: Ionospheric perspective. Journal of Geophysical Research: Space Physics. 115: A10.
• Kaselimi M, Voulodimos A, Doulamis N, Doulamis A, Delikaraoglou D. (2020). A causal long short-term memory sequence to sequence model for TEC prediction using GNSS observations. Remote Sensing. 12(9): 1354.
• Noor MH and Ige AO (2025). A survey on state-of-the-art deep learning applications and challenges. Engineering Applications of Artificial Intelligence. 159: 111225.
• Osanyin TO, Candido CM, Becker-Guedes F, Migoya-Orue Y, Habarulema JB, Obafaye AA, Chingarandi FS, Moraes-Santos SP (2023). Performance of a locally adapted NeQuick-2 model during high solar activity over the Brazilian equatorial and low-latitude region. Advances in Space Research. 72(12): 5520-38.
• Osanyin TO, Maria Nicoli Candido C, Becker-Guedes F, Migoya-Orue Y, Habarulema JB (2025). Ingestion of GNSS-Derived-TEC Into NeQuick 2 Model Over South America. Space Weather. 23(12): e2024SW004212.
• Reddybattula KD, Nelapudi LS, Moses M, Devanaboyina VR, Ali MA, Jamjareegulgarn P, Panda SK (2022). Ionospheric TEC forecasting over an Indian low latitude location using long short-term memory (LSTM) deep learning network. Universe. 8(11): 562.
• Sarker IH (2021). Deep learning: a comprehensive overview on techniques, taxonomy, applications and research directions. SN Computer Science. 2(6): 1-20.
• Seemala GK, Katual I, Kapil C, Vichare G (2023). Seasonal and solar activity dependence of TEC over Bharati station, Antarctica. Polar Science. 38: 101001.
• Seemala GK, Valladares CE. Statistics of total electron content depletions observed over the South American continent for the year 2008 (2011). Radio Science. 46(05): 1-4.
• Thompson Neil C, Kristjan G, Keeheon L, Manso Gabriel F (202). The computational limits of deep learning. Cornell University, arXiv:2007.05558, 10: 2.
• Zhang R, Li H, Shen Y, Yang J, Li W, Zhao D, Hu A (2025). Deep learning applications in ionospheric modeling: progress, challenges, and opportunities. Remote Sensing. 17(1): 124.
Topcon Positioning Systems has signed a commercial agreement with Xona to secure early-adopter access to Pulsar, Xona’s low Earth orbit (LEO) satellite navigation constellation. This agreement positions Topcon among Xona’s first commercial customers preparing to integrate Pulsar into future high-precision positioning workflows.
“The letter of agreement reinforces Topcon’s long-standing commitment to innovation and customer-driven technology leadership,” said Ron Oberlander, head of the Topcon Geomatics Platform. “It lays the groundwork for a new era of high-precision performance possibilities as LEO satellites come online. By proactively adopting next-generation navigation infrastructure, we strengthen our commitment to provide reliable, resilient, and future-proof solutions for our customers.”
“Topcon understands where accuracy, continuity and confidence matter most for operators in the field,” said Bryan Chan, co-founder and VP of Strategy at Xona. “By adding a modern navigation layer into Topcon’s offerings, Pulsar will strengthen signal performance and resiliency in even the most challenging environments, ensuring Topcon customers can operate with greater confidence wherever their work takes them.”
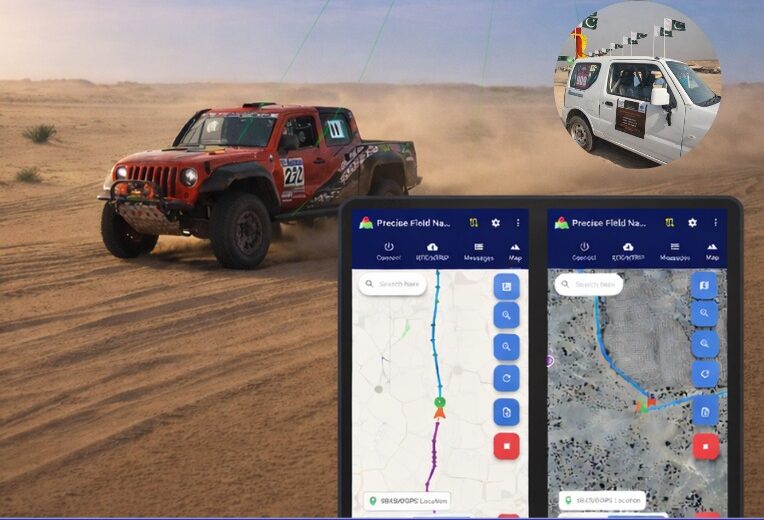
Pakistan’s national space agency SUPARCO (Space and Upper Atmosphere Research Commission) has achieved a major milestone in navigation technology with the successful launch of its Pak-SBAS satellite-based augmentation system (SBAS) device and service.
The Pak-SBAS navigation service was rigorously tested in the extreme desert conditions of Cholistan during Cholistan Desert Rally 2026. The Cholistan desert experinces high speeds, unpredictable routes, and the absence of visual landmarks that demand exceptional positioning accuracy and signal reliability for autos and motorcycles.
Throughout the rally, Pak-SBAS demonstrated remarkable performance by delivering highly precise location data, stable signal continuity, and integrated route tracking.
By applying SBAS corrections, the system significantly reduced positioning errors compared to conventional GNSS technologies, offering rally drivers and navigation teams a new level of confidence essential for competitive desert racing.
According to a SUPARCO spokesperson, the Pak-SBAS technology holds vast potential beyond motorsports. It is expected to enhance disaster response operations through accurate tracking of rescue teams and affected areas, improve transport efficiency via real-time vehicle positioning, and strengthen aviation safety with more reliable navigation support.
The system also will benefit the surveying and mapping sectors by minimizing positional inaccuracies and reducing project costs.
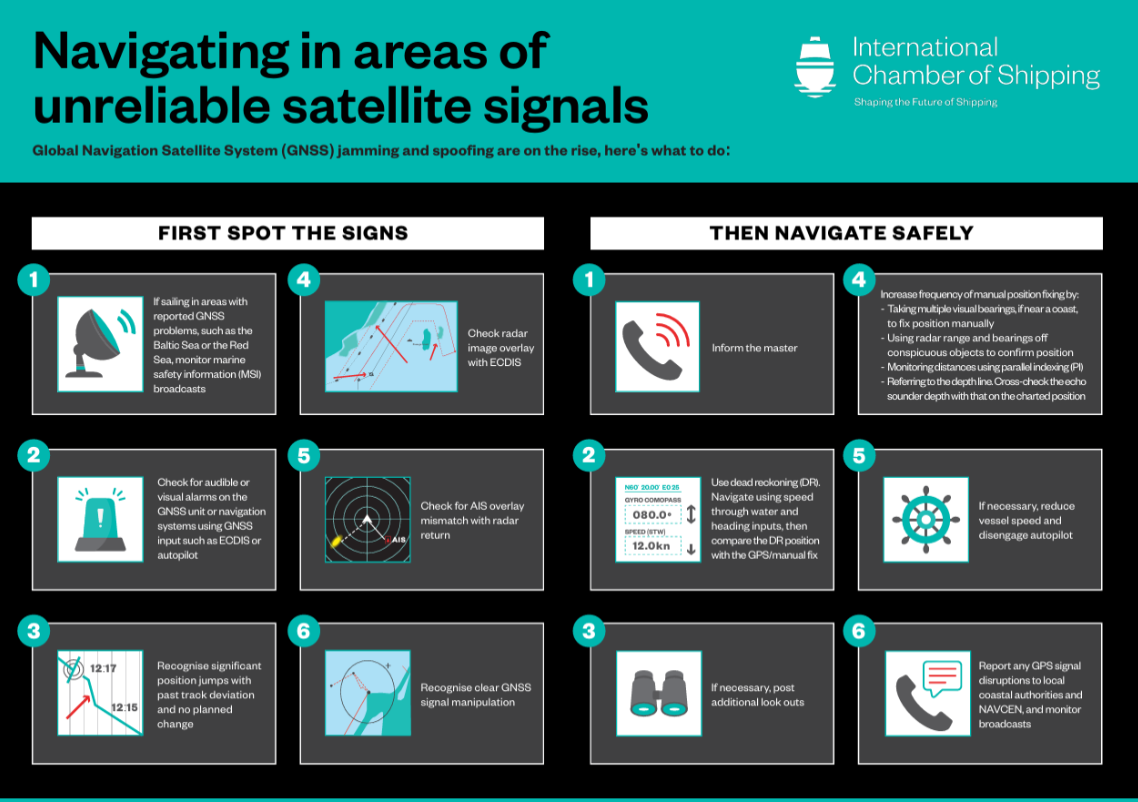
The International Chamber of Shipping (ICS) and its members have produced an informational poster for ship crews that highlights strategies when GNSS signals are jammed or denied.
The Navigating in Areas of Unreliable Satellite Signals poster is available for free on the ICS website. Crews are welcome to download and print it for display near the conning position on board navigation bridges.
Modern maritime operations depend heavily on GNSS. From open-ocean routing to precise harbour maneuvers, satellite-based positioning data is deeply embedded in ship systems, port logistics, traffic monitoring and safety infrastructure.
This reliance, however, has created a growing vulnerability. Incidents of GPS jamming and spoofing, once a military concern, now increasingly affect merchant ships at sea and near ports. Without proactive preparation and mitigation, interference with satellite navigation threatens vessel safety, global trade efficiency, port operations and maritime security.
To support crews facing these incidents, the poster helps bridge officers identify the signs of compromised satellite signals and recommends best practices to maintain safe navigation.
“The safety of our seafarers, ships, and the environment is critical,” said Gregor Stevens, ICS Nautical Director. “With ever-increasing frequency of jamming and spoofing of GPS, this new free resource helps seafarers recognize the warning signs and provides guidance on navigating these waters safely.”
Dedicated research and development, funded by European Union (EU) and European Space Agency (ESA) programs over the years, has played a key role in Galileo Second Generation.
Among the innovations that will benefit the new satellites are the development of new atomic clocks, links that allow the satellites to “talk” to one another in orbit and a prototype ground station that can precisely pinpoint satellites in the sky. These advanced technologies will ensure Galileo continues to provide world‑class positioning, navigation and timing to users worldwide.
The importance of R&D
Satellite navigation is constantly evolving, with new technologies being deployed. But before a technology can fly on a satellite, it must be derisked and qualified. This is where research and development (R&D) comes in, laying the groundwork for new technologies long before they see the light of day.
Horizon 2020 and Horizon Europe are R&D programs funded by the EU. A significant budget from these programmes is delegated to ESA for R&D to derisk new technologies for evolutions of Europe’s Galileo and EGNOS systems.
Complementing these EU R&D programs, ESA programs such as the General Studies Programme (now Discovery and Preparation), General Support Technology Programme and the former European GNSS Evolution Program (EGEP) have also performed R&D for future satellite navigation technologies.
R&D spurs the innovation that allows Galileo and EGNOS to modernise and develop new applications and services. Several activities funded through these programmes have contributed to Galileo Second Generation (G2). Some of these technologies will already fly on the G2 satellites when they are launched in the coming years.
New ways of keeping time
Galileo relies on highly precise onboard atomic clocks to ensure accurate global positioning and timing. Here, an iodine optical clock by SpaceTech, Germany (Credit: ESA)
Galileo delivers world-class positioning and timing, and its onboard clocks are the key to its performance. Each first generation Galileo satellite carries two passive hydrogen maser and two rubidium atomic frequency standard clocks. These clocks, developed by Leonardo and Safran Timing Technologies, respectively, are currently Galileo’s only space-qualified clocks.
A rubidium pulsed optically pumped (Rb POP) clock by Leonardo, Italy. (Credit: ESA)
To keep up with the latest technologies and allow for a broader diversity of European qualified clocks, R&D activities have encouraged European companies to develop new types of space-worthy atomic clocks. This investment is critical due to the time and expertise it takes to develop such complex and sensitive technologies. These activities aimed to develop alternative atomic clocks for Galileo that can improve performance and robustness and support Europe’s place as a leader in satellite navigation.
A Mercury ion clock (MIC) from Safran Timing Technologies, Switzerland. (Credit: ESA)
Seven innovative clock technologies were developed by European companies from France, Germany, Italy and Switzerland. After initial development activities, three of these clocks — proposed by Leondardo, SpaceTech and Safran Timing Technologies — were selected to progress to hardware development in preparation for a first flight.
Leonardo’s Rubidium Pulsed Optically Pumped clock is currently under development and planned to fly as an experimental clock on a Galileo Second Generation satellite. The Iodine Optical clock developed by SpaceTech is undergoing early development and shows potential for future use as an experimental clock on Galileo satellites. The Mercury Ion clock by Safran Timing Technologies recently launched its development activities.
Following an analysis of the clocks’ eventual in-orbit performance, a programme decision by the European Commission will be made before starting the operational phase of these new clock technologies.
Conversations in the sky
An intersatellite link transceiver by Thales Alenia Space. (Credit: ESA)
The Galileo system currently relies on links between satellites and ground stations to monitor and control the satellites and to determine the onboard clock skew. Clock skew occurs when a clock signal reaches different parts of a system at different times, which can cause errors in position calculations.
Galileo Second Generation will introduce inter-satellite links (ISL), allowing the satellites to ‘talk’ directly to one another in orbit. This will enable additional time synchronisation and ranging measurements that will improve knowledge of the satellites’ orbit and clock skew.
ISL will also allow faster data dissemination. If a particular satellite is not visible to a ground station, information can be sent to a different satellite and then passed on instead of waiting for the satellite to be visible.
An intersatellite link transceiver by Airbus Defence and Space. (Credit: ESA)
Two early models of ISL transceivers that are essentially identical to those which will fly on the Galileo Second Generation satellites were designed and developed. The transceivers, which can both send and receive signals, were developed by Thales Alenia Space (Spain) and Airbus Defence and Space (Germany).
One of these transceivers is about to enter the formal testing phase, while the other has undergone successful environmental qualifications. After the transceivers have completed their qualifications and testing, they will be ready for their trip to space.
Precisely pinpointing satellites
Accurate positioning, navigation and timing relies on knowing precisely where satellites are in their orbits. Galileo satellites are located by tracking their L-band antenna transmissions from the ground. Each satellite also has a laser retroreflector, which allows measurement of their orbit to within a few centimeters. Known as satellite laser ranging (SLR), this method measures the time it takes for a laser pulse to make the trip from a ground station, called an SLR station, to the satellite and back, then uses these measurements to determine the satellite’s orbit. Presently, SLR stations are owned and operated by scientific community users and serve multiple space missions.
One of the challenges of current SLR is the fact that the lasers are not safe for human eyes and cannot be used if an aircraft is flying nearby as the lasers could blind the pilots. This means SLR stations must coordinate with civil aviation and may not be allowed to use all parts of the sky. SLR stations also have limited availability due to local atmospheric conditions (clear skies are key), and low levels of automation (intensive need for human operators).
A prototype satellite laser ranging station in Matera, Italy. (Credit: ESA)
To mitigate these limitations, a modernized, eye-safe SLR station prototype for Galileo satellites has been developed by DiGOS (Germany) and commissioned in Matera, Italy. Due to the station design and laser wavelength used, there will be no need to coordinate with civil aviation. The station’s new technologies also explore increased automation using a predefined schedule to reach satellites. Although human operators are still needed, their workload is reduced.
A field campaign of the prototype SLR station is planned for this year as part of the Galileo Second Generation System Test Bed tasks. It will evaluate the potential benefits of SLR as a complement to L-band ground ranging. If the station is added to the Galileo ground segment, it could enhance the system’s robustness by providing an independent means of determining the satellites’ locations. In this case, interface design adjustments would need to be made to allow operational use of the station.
Beyond providing another method for determining Galileo satellite orbits, this station could also help contribute to the Galileo Terrestrial Reference Frame and could support ESA navigation scientific missions such as Genesis.
China has launched a short messaging service leveraging BeiDou (BDS) to provide reliable communication during emergencies when ground-based mobile networks are unavailable, reports Xinhua.
The service was introduced by China Space-Time Information Co. Ltd., the national operator of BeiDou services, in collaboration with major domestic telecom carriers.
The service is be a supplement to terrestrial mobile networks, expected to enhance safety and communication reliability for users across scenarios such as hiking in remote mountains, working at sea, and disaster relief and emergency coordination.
It marks a significant step toward bringing satellite communication technology to the public, integrating BeiDou’s capabilities into daily life and offering tangible technological protection.
The service uses the short-message communication capability built into the BeiDou system, enabling users with compatible smartphones to send and receive text messages directly via BeiDou satellites in areas without cellular coverage.
China’s three primary telecom operators — China Mobile, China Telecom and China Unicom — have all integrated the service. Subscribers can activate the service without changing their SIM cards or phone numbers, according to the company. Nearly 60 smartphone models from leading Chinese brands already support the functionality.
China Space-Time Information specializes in satellite navigation and communications, big data services, artificial intelligence development, and geospatial remote sensing.
Contract strengthens the company’s growing portfolio of U.S. government-funded PNT initiatives
TrustPoint has been awarded a $1.9 million Small Business Innovation Research (SBIR) Direct-to-Phase II contract focused on adapting and upgrading TrustPoint’s commercial C-band positioning navigation and timing (PNT) payload to integrate with U.S. Department of Defense (DoD) architectures and meet advanced government requirements.
The Air Force Research Laboratory and AFWERX, the innovation arm of the U.S. Air Force, have partnered to streamline the SBIR and Small Business Technology Transfer (STTR) process by accelerating the small business experience through faster proposal to award timelines, changing the pool of potential applicants by expanding opportunities to small business, and eliminating bureaucratic overhead by implementing process improvement changes in contract execution.
The Air Force began offering the Open Topic SBIR/STTR program in 2018, which expanded the range of funded innovations. Now, TrustPoint will accelerate its journey to create and provide innovative capabilities that will strengthen the national defense of the U.S.
TrustPoint is developing a low size, weight, power and cost (SWaP-C) payload designed to address the U.S. Space Force’s growing need for tactically responsive and resilient space capabilities. The upgraded payload will bolster resistance to GPS jamming and spoofing, and expand the operational resilience of PNT in contested environments — an essential requirement for future proliferated space architectures and for the autonomous systems, including drones, that depend on trusted timing and navigation.
The effort will culminate in laboratory testing in collaboration with the Air Force Research Laboratory (AFRL), setting the stage for potential Phase III deployment opportunities.
The award marks TrustPoint’s fifth Phase II SBIR in 18 months, spanning projects with the Air Force, Space Force and Navy, and adds to the company’s participation in government-funded PNT initiatives.
Successful deployment at APEX validates the technology as a crucial inertial-sensor stack for assured PNT on the modern battlefield.
Advanced Navigation successfully demonstrated in April 2025 its inertial-centric intelligent navigation as part of the U.S. Army’s All-Domain Persistent Experiment (APEX), underscoring the ability to deliver reliable, high-accuracy navigation in GNSS-degraded and -denied conditions.
Designed for the DDIL (Degraded, Denied, Intermittent and Low-bandwidth), APEX provided Advanced Navigation with an operationally relevant testbed to evaluate the performance of its Boreas D90 fiber-optic gyroscope (FOG) inertial navigation system (INS) when fused with complementary aiding sensors, including the laser velocity sensor (LVS) and a wheel-speed encoder. The results reaffirm Advanced Navigation’s intelligent software-defined approach as a resilient foundation for APNT on the modern battlefield.
“Assured PNT is non-negotiable. The only path to operational advantage is an intelligent, multi-sensor fusion anchored by a resilient inertial core. We deliver this with our sophisticated AdNav Intelligence software,” said Chris Shaw, Advanced Navigation CEO. “Now in our third year participating in this U.S. Army program, APEX continues to challenge our systems under realistic electronic warfare conditions.”
Boreas D90. At the center of the architecture is the Boreas D90, a strategic-grade FOG INS that serves as the “nervous system” of the navigation stack. Unlike conventional systems reliant on GNSS or magnetic compasses, Boreas D90 determines true North through gyrocompassing, using ultra-sensitive fiber-optic gyroscopes to detect the Earth’s rotation. This enables independent, high-confidence navigation, even when external GNSS signals are compromised.
AdNav Intelligence. AdNav Intelligence software continuously validates all sensor inputs, adjusts in real-time to the operational environment, and autonomously counteracts spoofing and jamming. The sophisticated software can adapt in real time to respond to incoming threats, dynamically weighing the input from each sensor to make real-time adjustments on which sensor to rely on based on their reliability scores, environmental conditions, and operational context.
Demonstration setup
During APEX, Boreas D90 with AdNav Intelligence was integrated with both a laser velocity sensor and a wheel-speed encoder aboard a four-wheel-drive vehicle. The demonstration was conducted during night operations at a site in rural New Mexico, under a created environment of complex and emerging electronic warfare threats with GNSS jamming.
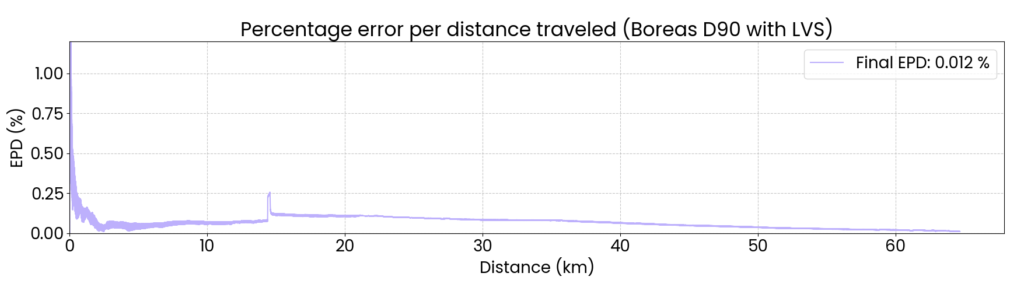
The Boreas D90 was fused with Advanced Navigation’s advanced infrared laser sensor that measures ground-relative 3D velocity with exceptional precision. LVS performs reliably on both ground and airborne platforms regardless of environmental conditions or the availability of visual references, as long as it maintains a clear line of sight to the ground or a stationary surface. By providing direct, drift-free velocity measurements, the LVS ensures continuous, high-precision mobility and enhances navigation resilience even in the most extreme contested GNSS environments.
This configuration demonstrated dead-reckoning accuracy, achieving a 0.012% error per distance traveled (7.5 m over 65 km) in the same contested conditions.
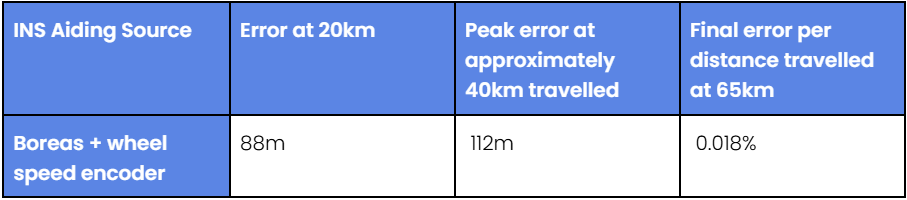
Wheel-speed encoder. Wheel-speed encoders offer a rugged and cost-effective source of motion data, measuring wheel rotation to determine ground speed and distance traveled. Their design ensures quick integration across tactical platforms. Ideal for firm terrain and structured routes, they provide dependable dead-reckoning performance when GNSS is denied, making them a practical choice for missions that demand reliability over complexity.
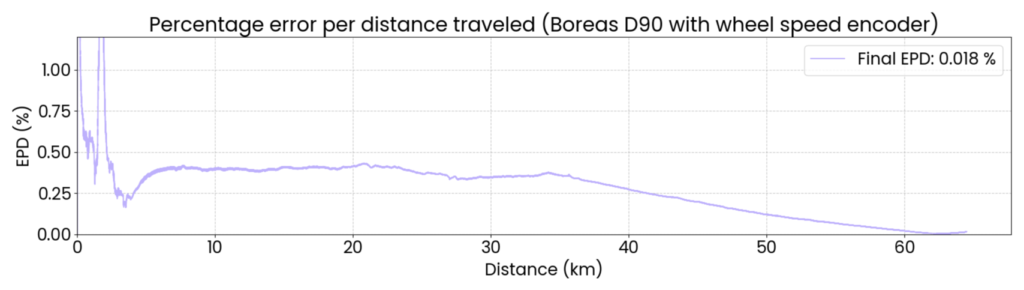
When paired with a wheel-speed encoder, the Boreas D90 delivered reliable dead-reckoning performance useful for platforms operating in predictable or structured environments. Across the demonstration, the Boreas D90–wheel-encoder configuration maintained strong navigation continuity, achieving a 0.018% error per distance traveled (11.7 m over 65 km), without reliance on GNSS, even under deliberate jamming.
Next Steps for APNT
For Advanced Navigation, the results from APEX show significant potential for a range of current and future defense applications. The technologies exceeded the team’s expectations, demonstrating the level of accuracy and operational reliability required for successful navigation under GNSS-denied and -degraded conditions.
Integrating INS with next-generation photonics promises to further advance capability, resilience and adaptability on the battlefield, Advanced Navigation said.
About the U.S. Army’s APEXevent
Previously known as the Positioning, Navigation, and Timing Assessment Experiment (PNTAX), the sixth annual APEX event was held at the U.S. Army’s premier military test range, designed to replicate the complex, contested conditions that forces are expected to face in future multi-domain operations.
The next experiment will include partners within the United States Air Force’s 746th Test Squadron and the Joint Navigation Warfare Center, U.S. Army Combat Capabilities Development Command, and the Army Test and Evaluation Command. Advanced Navigation expects to take part 2026.
APEX provides a rigorous environment for evaluating mission resilience across a broader spectrum of technologies. While resilient PNT remains a core component, the event extends to integrated sensing capabilities, advanced communications architectures, data transport, and edge processing. These systems are evaluated under threat-informed, operationally realistic scenarios that reflect the evolving demands placed on modern military platforms in GPS-degraded or -denied environments.
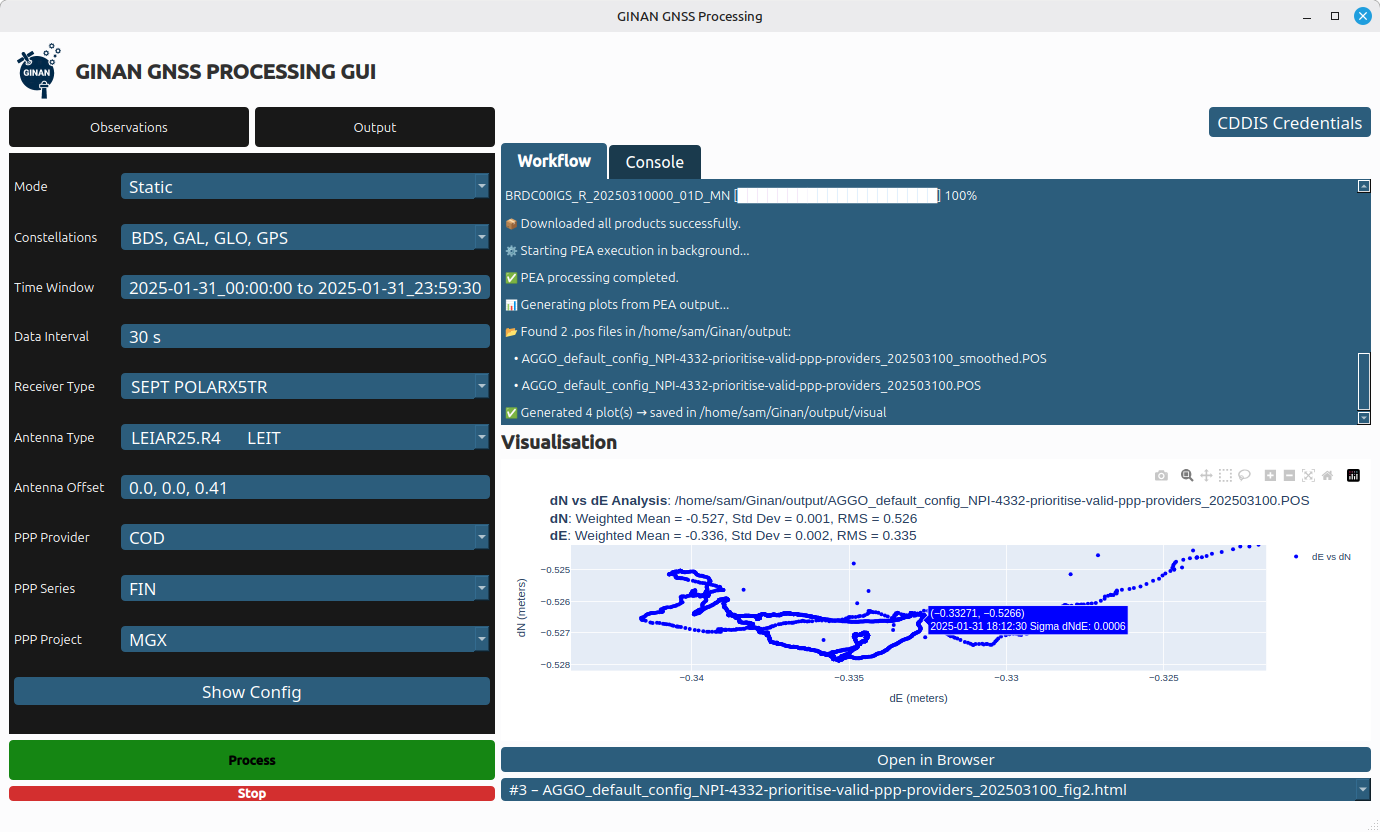
The v4.1.0 update includes new SouthPAN SBAS capabilities and additions to the graphical user interface (GUI).
Ginan is an open-source toolkit for creating precise point positioning (PPP) analysis products, correction streams and positions. It is being actively developed in a Geoscience Australia Positioning Australia program.
The source code for the current version of Ginan is available for download from GitHub. New versions of Ginan with enhanced capabilities will be developed and released over time.
Geoscience Australia is establishing operational instances of Ginan that produce PPP analysis products and streams on a continuous basis, and which are available free of charge.
Furuno Electric and Xona Space Systems have signed a Memorandum of Understanding (MoU) to collaborate on solutions using Xona Pulsar, a low-Earth-orbit positioning, navigation and timing (LEO PNT) service for next-generation satellite navigation.
Through the agreement, both companies will leverage their respective technological expertise and business strengths to explore opportunities for delivering advanced and promising LEO PNT solutions.
Furuno has been actively pursuing LEO PNT as a promising technology capable of complementing or even substituting for GNSS.
LEO PNT refers to systems that use a satellite constellation of 200 to 400 satellites deployed in low Earth orbit at an altitude of 500 km to 2,000 km. The LEO constellation is designed for PNT rather than non-terrestrial networks to provide global positioning and timing services similar to GNSS, but with significantly better performance.
Xona is a pioneer in LEO PNT technology and offers a commercial service called Pulsar, which uses a dedicated LEO PNT constellation of 258 satellites. Compared to conventional GNSS, this service enhances resiliency and improves the accuracy of positioning and timing — the proximity of LEO satellites to Earth makes their signal power about 100 times stronger.
Pulsar adopts a signal architecture similar to GNSS for compatibility, making it easy to integrate into existing GNSS products. Integrating Xona Pulsar into Furuno’s products will provide an alternative to GNSS while significantly boosting performance by complementing existing GNSS services.
Furuno’s Pulsar-enabled timing solutions allow users to maintain accurate synchronization even when GNSS is degraded due to unexpected failures, including jamming and spoofing, the companies said.