Rapid innovation is reshaping GNSS/PNT and positioning, navigation and timing (PNT) landscapes. The same can be said for the channels through which we provide this content to you.
GPS World is making strategic refinements to its magazine publishing schedule and digital solutions portfolio to better serve our subscribers. Our transition from a monthly print and digital edition cadence to a six-times-per-year magazine frequency will better align with buying cycles and industry events.
That’s why the issue you are reading now will be the last of 2025. We will have plenty of new content online daily at GPSWorld.com to keep you informed on trends and new developments in the GPS, GNSS and PNT sectors.
Going forward, GPS World will publish our print issue six times. In 2026, look for issues in February, March, May, June, September and October. We will continue to bring you the same exclusive content, including our Simulator Buyers Guide and our GNSS/PNT Buyers Guide. We’ll have our guest columns, such as Inside the Box. Plus, our popular departments PNT Corner, Evolution, Mapping Marvel, LaunchPad, MarketWatch, System of Systems and Seen & Heard will round out our print editions.
In 2026, our cover stories will tackle transportation, defense, simulators, autonomous systems, precision agriculture and complementary PNT, as well as surveying and mapping. Every GPS World issue will continue to deliver exclusive technical content and market insights — only now, each edition will delve deeper into today’s hottest trends in GNSS/PNT.
In tandem with our magazine content and publishing evolution, GPS World is significantly expanding its digital offerings. New and enhanced digital platforms include:
GPSWorld.com. Watch for more exclusive content focused on the market segments that matter most.
Weekly e-newsletters.Navigate! Weekly, Survey Scene, Defense PNT and Autonomous Arena deliver insightful columns and the latest news straight to your inbox each month.
Custom, sole-sponsored e-newsletters, webinars and digital events. Keep an eye out for turnkey opportunities to showcase thought leadership and new technologies.
These changes reaffirm GPS World’s commitment to being the most authoritative and effective media brand for reaching professionals in the GNSS, PNT and GPS markets. For the past 35 years, GPS World has served readers in print and online, and we have no intention of changing that now. Technology may have evolved over that time, but our dedication to providing you with the latest news and in-depth coverage will continue.
The CR8894SXF+ is an advanced controlled reception pattern antenna (CRPA) for anti-jamming. It is engineered to provide efficient interference protection and real-time situational awareness across critical infrastructure, marine and defense environments where GNSS continuity is mission critical. It is specifically designed to provide a low-power and lightweight solution in a compact size. It features advanced in-band null forming to protect GPS L1/L2 and Galileo E1/E5b signals, helping ensure resilient positioning, navigation and timing in environments with contested, congested or degraded radio frequency conditions. The antenna incorporates Calian’s eXtended Filtering interference mitigation technology to maintain performance and reliability when RF threats are present. The CRPA supports in-band null-forming of 20 dB to 40 dB and out-of-band rejection up to 80 dB across 700 MHz to 2,500 MHz. It includes two independent low-noise amplifier channels, allowing continued operation if one signal band is compromised. The antenna forms nulls in both upper (L1/E1) and lower (L2/E5b) GNSS bands to actively suppress jamming sources. A serial output interface provides real-time feedback, enabling users to monitor RF conditions and system status.
The BlackNaute autonomous positioning, navigation and timing (PNT) system integrates Safran’s HRG dual-core inertial navigation technology, the Skylight multi-mode GNSS receiver board, and an atomic clock to offer navigation resilience in challenging electronic warfare environments. BlackNaute’s built-in atomic clock is designed to maintain precise timing, which is essential for secure communications and collaborative combat operations. The system features advanced anti-jamming and anti-spoofing algorithms, which have been validated in more than 16,000 operational cases. These capabilities allow BlackNaute to detect compromised signals and automatically switch to autonomous and trusted navigation and timing sources to ensure continuity of operations. Its modular design allows it to be adapted across a variety of platforms. Airbus Helicopters has selected the NH90 to be equipped with this new Embedded GNSS and Time INS (EGTI).
Suite enhanced for greater accuracy, coverage and insight
Photo: US Navy
HawkEye 360’s GNSS-I Detection suite includes powerful enhancements to its GNSS interference detection capabilities. The upgrades — designed with defense, intelligence and national security operations in mind — offer unprecedented accuracy, coverage and insight into global GPS jamming and spoofing threats. The update includes a new wider frequency algorithm that better distinguishes individual emitters, incorporates GPS spoofing detection, and is terrain adjusted for better geolocation accuracy, delivering greater situational awareness and more precise geolocation of interference sources worldwide. The enhanced product suite supports strategic decision-making by providing timely, precise insight into potential signal disruptions, enabling stakeholders to better assess risk, respond confidently, and maintain operational continuity in dynamic environments.
For complex intelligence, surveillance and reconnaissance missions
Photo: ESEN-UAS
The GöKHUN unmanned aerial system (UAS) is a tactical vertical take-off and landing (VTOL) drone system developed for versatile missions on land or at sea. GöKHUN combines the compact mobility of a NATO Class I UAV with the performance data of a Class II tactical system. It uses the SP 210 FI GS 2-stroke engine from Sky Power International. With a take-off weight of up to 110 kg and a maximum fuel and payload capacity of 26 kg, the GöKHUN can remain in the air for up to 16 hours with a minimum payload. Even with a demanding sensor load of 12 kg, it can achieve a flight duration of around nine hours, making it suitable for long-endurance reconnaissance and surveillance missions. The GöKHUN’s cruising speed is between 96 and 158 km/h. The maximum range with direct line-of-sight is over 150 km, with the system reaching a service ceiling of approximately 5,500 m.
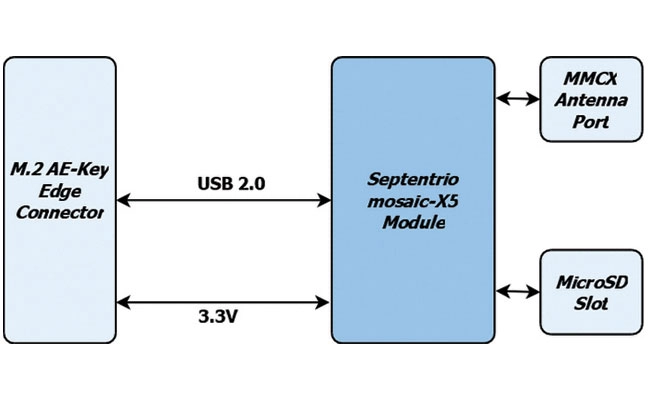
The M.2 card GW16160 is the first Septentrio-based product from Gateworks, a U.S.-based manufacturer of single-board computers. The GW16160 provides reliable high-accuracy positioning powered by the mosaic-X5 GNSS module, a high-quality positioning solution for autonomous robots, UAVs and industrial mission-critical applications. The GW16160 allows engineers to integrate high-accuracy GNSS into edge systems without bulky external receivers or complex RF design. This ultra-low power card features an M.2 A/E-Key interface with USB 2.0 connectivity for plug-and-play integration.
The Trimble RTX-NMA (Navigation Message Authentication) mitigates spoofing attacks on GPS and BeiDou signals. RTX-NMA leverages the Trimble RTX correction service and enhances the security and integrity of GNSS navigation messages for all Trimble ProPoint receivers. Used in conjunction with Galileo OSNMA, users now have three constellations protected from spoofing attacks. Trimble RTX-NMA seeks to detect both fake GNSS signals and faulty ephemeris data through real-time authentication that ensures navigation messages from multiple RTX reference station receivers are genuine and trustworthy. It also encompasses faulty ephemeris detection, preventing unreliable data from being included in the correction stream. Enhanced security through advanced cryptographic techniques like AES encryption, and stream authentication, take it a step further. Trimble RTX-NMA is compatible with various Trimble GNSS receivers using firmware version 6.40 or greater.
Instead, the ANPR-FASTag hybrid system will continue to rely on ground-based high-speed cameras to identify vehicles and radio-frequency-identification FASTag readers to charge them.
The Ministry of Road Transport and Highways is proceeding with corridor projects relying on automatic number-plate recognition (ANPR) and FASTag systems, which don’t require vehicles to stop. A GNSS toll system tracks the exact location of the vehicle and calculates the distance traveled on a toll roll, ensuring that users end up paying for just the distance they actually traveled.
For several years, the Indian government had intended to implement a GNSS-based toll system based on real-time location tracking. Now, it looks like these plans have been scrapped.
Promoting precious pollinators
Washington State University (WSU) is leading the Pacific Northwest Pollen Atlas (bees.wsu.edu) to map and describe pollen. It aims to determine pollinator health and thus food humans eat that depend on pollination. Honey bees and other pollinators collect pollen from plants within a two-mile radius of their hive.
“We hope to create a database of plants and share the nutrient content in their pollen so gardeners can plant a healthy variety,” said Priya Chakrabarti Basu, WSU assistant professor, Entomology.
Researchers will map pollen varieties collected by citizen scientists in every Washington county over a four-year period and colleagues around the Pacific Northwest are also recruiting to increase the project’s scope. Expected to take decades to complete, the efforts are part of Basu’s larger effort to map pollen nutrition across North America.
How’s the weather out there?
High-resolution atmospheric data is the missing link in forecasting weather. A new approach sharpens GNSS tomography, while showing how the model makes decisions — a transparency critical for building trust as AI enters weather forecasting.
By revealing the hidden details of storms and humidity patterns, the new method can give forecasters the tools needed to anticipate extreme events with greater confidence, according to researchers at Wrocław University, Poland. The team described their deep-learning framework in a paper published in Satellite Navigation in August.
With sharper GNSS tomography, meteorologists can feed more accurate humidity fields into both physics-based and AI-driven forecasting models, significantly improving storm prediction and early-warning systems.
Africa is really huge
Photo: Equal Earth, Strebe / CC BY-SA 4.0
A Correct the Map campaign aims to replace the 16th-century Mercator map because it doesn’t show the true size of Africa, which is three times as large as Europe. Supporters say the historic map — created to guide European explorers — promotes a false view of the continent and its size, fostering a false impression that Africa is “marginal.”
In August, the 55-country African Union endorsed the campaign to have organizations around the world replace the Mercator with alternatives such as the 2018 Equal Earth projection. The African Union is expected to make an official decision to adopt the Equal Earth map in February. The campaign also asks the United Nations and the BBC to adopt the Equal Earth map.
Allows upgrades of older machinery for smaller farms
Topcon’s has created a Value Line Steering solution for farmers using mid-range tractors on small- to medium-sized farms. It makes autosteering technology — typically used on larger machinery — accessible to a broader range of farmers. Farmers with older or smaller machinery, or small specialty farms, can boost the value of their machinery with the autosteering technology. The integrated system is designed to work across a wide range of applications, machinery and brands. It includes compliance with ISOBUS-UT to offer universal compatibility and ease of use. The package includes a GNSS receiver, electric steering wheel controller, touchscreen console and Horizon Lite software, compatible with front-wheel-steer tractors. Farmers can add local, satellite or RTK correction services such as Topcon’s Topnet Live for enhanced precision.
U.S. Department of Transportation (DOT) figures show incidences of GPS signal interference, such as jamming and spoofing, have increased significantly in both North America and much of Western Europe. Both commercial and military operations are affected, and ADS-B reports from Zurich University of Applied Sciences (ZHAW) cite up to 700 global GPS spoofing and jamming incidents taking place daily.
Events are particularly concentrated around war zones, with Lithuanian airspace alone recording more than 300 cases of GPS interference in March. The consequences have ranged from emergency diversions of civilian aircraft to, in at least one case, the downing of an aircraft. Other sectors reliant on precise timing and geolocation, such as communications and emergency services, also are being impacted.
Of course, it’s not just navigation; and a swath of industries rely on PNT signals. This includes secure and regulatory-compliant financial transactions, power grid synchronization, asset tracking, ensuring data integrity and coordinating workloads across global telecommunications and artificial intelligence (AI) servers.
How can PNT systems be made more resilient to this interference? What emerging technologies enable PNT systems to maintain operational capability in GPS/GNSS-denied, degraded or disrupted space operational environments (D3SOE)?
Interference Techniques
GPS interference comes in a wide variety of forms, and systems are susceptible because the signals from the satellites are faint by the time they reach the Earth.
Jamming is a brute force denial of service (DoS) attack, with a device transmitting a signal on the same L1 (1575 MHz), L2 (1227 MHz) or other relevant bands as the PNT satellites. Being nearer and stronger, these signals drown out the GPS information and prevent the ability to calculate a position, simply making GPS services unavailable.
Conversely, spoofing is a more sophisticated technique that mimics the structure of an authentic satellite signal but transmits falsified timing and positioning data. Similar to jamming, this relies on the spoofed signal being closer and more powerful than the legitimate PNT transmission and can either trick the navigation system into believing it is suddenly in a different position, or alter it slowly over time causing, for example, a ship or aircraft to deviate into an unsafe location.
These DoS and deception techniques are the major classes, but in addition to natural and accidental man-made sources, there also are multiple variations on spoofing techniques and methodologies:
Meaconing: Rebroadcasting of an authentic signal with a delay and shift in position to affect navigation systems.
Replay attacks: Like meaconing, but more targeted to financial transactions, fooling GPS-based time-stamping systems into accepting fraudulent transactions.
Data-level manipulation: Where false orbital data, clock corrections and GPS time is given in addition to the location data. These tend to be harder to detect and cause slow changes. They also can be applied to systems that rely on precise timing, such as financial networks and power grids.
PNT Resilience
PNT resilience standards are set out in the draft IEEE P1952 standard, which specifies technical requirements and expected behaviors for resilient PNT user equipment.
End users can test five behavior levels, which are defined within this standard to enable users to select a level that is appropriate based on their risk tolerance, budget and application criticality.
Photo: PNT Resilience Levels
Level 1 represents a basic ability to detect interference such as jamming, spoofing, or other disruptions, and alert users. Level 2 enables equipment to automatically recover to normal operation when the disruption is no longer present. In level 3, the equipment can maintain acceptable performance during the disruption. This capability is fortified in level 4 by leveraging multiple diverse sources or advanced mitigation techniques. Finally, level 5 enables the equipment to verify that the time or PNT information received is accurate.
Here in the U.S., the NIST 8323.1 Cybersecurity Framework for PNT also offers a comprehensive approach to assessing and mitigating PNT-specific cybersecurity risks. The DHS’ Resilient PNT Conformance Framework and CISA Federal PNT Services Acquisition Guidance are additionally important.
Countering Jamming
Traditional PNT systems are struggling to keep pace and meeting IEEE P1952 to tackle GPS interference requires a sophisticated, multi-source zero-trust architecture that never trusts, always verifies and authenticates, and goes beyond simple signal reception. For mission-critical systems, not only do threats need to be detected, but incoming data need to be validated and alternative sources for PNT incorporated, all within an intelligent sensor fusion system.
If we look first at the DoS jamming technique, here the issue is an inability to detect the medium-Earth orbit (MEO) GPS/GNSS signal in the presence of another more powerful signal.
It is possible, however, to reinforce L-band communications from GPS satellites, and look to stronger signals, notably from low-Earth orbit (LEO) satellites. While these have less accuracy for timing (GPS/GNSS: <15 ns vs 80 ns for LEO), they are significantly stronger (the Iridium LEO STL signal is 1000x stronger than GNSS) and are more resistant to jamming.
Countering Spoofing
In spoofing, the use of encrypted signals is vital.
GPS signals are open, unencrypted and should not be trusted blindly, and the use of alternative cryptographically secured alternatives is essential to ensure the signal’s origin is legitimate. For example, this is implemented on both the Inmarsat GEO and Iridium LEO satellites used in VIAVI’s SecurePNT and SecureTime services.
Sensor fusion also should be implemented to combine PNT data with information coming from onboard sensors such as inertial measurement units (IMUs) to identify inconsistencies — not just sudden large jumps but continual slight deviations.
Beyond these, navigation message authentication can be implemented, using a public key to verify the satellite-broadcast signature and prove the location, clock corrections and status being transmitted. This is already implemented by Europe’s Galileo Open Service Navigation Message Authentication (OSNMA) and makes it very difficult to data-level spoof these satellites.
While using receiver autonomous integrity monitoring (RAIM) techniques, calculate position with redundant satellites, excluding one satellite each time to check for consistency of results. ARAIM (advanced RAIM) uses the same technique, but applies it to multiple constellations, for example, GPS and Galileo.
Signal liveliness/consistency checks can be particularly effective against meaconing and replay attacks. These techniques examine the Doppler shift of the signal, with satellites having predictable and specific profiles that will differ significantly when compared to a ground-transmitted signal, which will have a near-zero Doppler shift.
Operating Under D3SOE
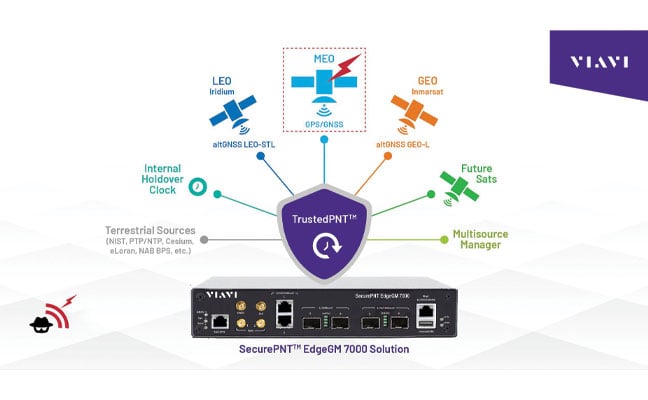
The above is a summary of the types of techniques that underpin VIAVI’s SecurePNT and SecureTime services.
SecureTime eGNSS GEO uses an encrypted L-band signal, transmitted from Inmarsat’s GEO satellites to create an enhanced timing service with GNSS authentication and anti-spoofing capabilities and provides sub-5 ns timing accuracy when installed on SecurePNT products.
Conversely, the SecurePNT systems implement multi-source receivers for GNSS backup and multi-band GNSS with GEO-L for outdoor antennas. The PTP grandmaster uses the latest sub-microsecond accuracy PTP protocol and the traditional millisecond range accuracy Network Time Protocol (NTP) to be compatible with virtually all standard IT equipment — also implementing high-speed 25G PTP Ethernet for connection to high-performance AI data center and AI-RAN networks and financial exchanges without creating bottlenecks.
Terrestrial sources, such as a network PTP feed and an optional atomic caesium clock, also can be used for synchronization to increase resilience in the event of a prolonged GPS outage. Nino De Falcis is an experienced business development leader with a strong background in the Global PNT market. Currently serving as the senior director of Global PNT Business Development at VIAVI Solutions since January 2024, he focuses on accelerating global business development and identifying growth opportunities.
The demand for autonomy is accelerating across industries, reshaping how systems are being developed and deployed.
For UAVs, the push for precision is driven by emerging use cases, such as package delivery, medical transport and complex route navigation in urban environments, all of which require centimeter-level accuracy in positioning and landing.
Importance of Correction Services
Trimble is expanding its Centerpoint RTX positioning technology from agriculture and surveying applications into the rapidly growing autonomous markets of UAVs, robotics and vehicles.
CenterPoint RTX is a global correction service that delivers centimeter-level positioning accuracy, engineered to ensure reliable and precise positioning anywhere around the world.
RTX employs a fixed, stable datum to ensure consistent and reliable performance. The system supports all major satellite constellations and frequencies, offering users a robust and flexible positioning system. The service can be accessed through either L-band satellite signals or a standard internet connection, eliminating the need for local base stations and making high-precision positioning far more scalable and accessible.
This level of reliability is crucial for emerging applications such as drone delivery.
“When you start talking about package delivery, operators need robust positioning,” explained Joe Hutton, director of inertial technology and airborne products at Trimble Applanix. “One reason is what we call ‘the last meter’ — drones need to be able to land or drop packages consistently within that final meter of their destination.”
Hutton noted that precision requirements are becoming even more demanding. “It’s actually getting smaller than a meter now. You need that robust centimeter-level positioning to ensure the drone is in exactly the right spot for safe and accurate delivery.”
When asked about alternative positioning methods, Hutton explained why traditional RTK systems can fall short for these applications. “RTK has its traditional limitations,” he said. “You have to be within 20 km of a base station, you need to set up infrastructure, and then you face all kinds of datum issues between different base stations.”
This is where CenterPoint RTX offers a significant advantage. “You don’t get those problems with CenterPoint RTX because it’s a global correction service operating on a fixed reference datum that never changes,” Hutton explained. “If you use the same technology to survey your landing spot — say with a Trimble DA2 product using RTX — everything fits perfectly. It’s always going to be in the same datum.” He noted that this consistency has proven very popular with users because it eliminates the complex datum coordination issues inherent in RTK systems.
Beyond datum consistency, Hutton highlighted another critical consideration: signal robustness and jamming and spoofing. “While commercial drone applications typically operate outside conflict zones where intentional jamming occurs, operators still need protection against interference,” he said. “You can have radios causing jamming just inadvertently.”
Trimble’s OEM GNSS/INS systems for UAV navigation, such as Trimble PX-1, use aided inertial navigation system (INS) software that blends GPS positioning with inertial sensors using RTX corrections to offer robust position and orientation data — including precise roll, pitch and heading measurements — that can maintain accuracy even during short GNSS signal outages.
The system provides inertial-based heading, which addresses another critical challenge in drone navigation. Traditional approaches rely on magnetometers for heading determination, but these are easily influenced by nearby metal structures and electromagnetic interference. In contrast, inertial-derived heading comes directly from the IMU itself, making it immune to magnetic disturbances and far more reliable in complex environments, making it suitable for drone delivery in busy urban environments.
Advanced Navigation has successfully demonstrated a breakthrough in underground navigation, delivering high-precision positioning without reliance on fixed infrastructure or GNSS.
The demonstration of the company’s Hybrid Navigation System was livestreamed from the Pyhäsalmi Mine in Pyhäjärvi, Finland, as part of the Deep Mining Open Call under the Think and Act Differently program sponsored by BHP, an Australian mining and metals corporation.
The Deep Mining Open Call, launched in September 2024, sought innovators with capability that could be applied to deep underground mining. The focus was on addressing challenges such as high temperature, high rock stress, and hyper-saline conditions in deep mining environments. The inactive Pyhäsalmi mine has the harsh conditions and depth required for the technology test.
Based in Australia, Advanced Navigation was selected from more than 90 global applicants to demonstrate its technology.
Positioning Challenges
Navigating the vast subterranean network of the Pyhäsalmi Mine posed significant challenges. The mine is situated just two degrees below the Arctic Circle, where traditional systems fail. Located 1.4 km underground at a latitude of 63°, it is completely impervious to GNSS signals. Its repetitive, multi-level tunnel network creates a high risk of visual disorientation, while its metallic ores distort magnetic fields and scatter radio waves.
To overcome these conditions, mines typically rely on infrastructure-heavy solutions such as ultra-wideband beacons, Wi-Fi, 5G repeaters or perception-based techniques such as simultaneous localization and mapping (SLAM), which require cameras. These methods are costly to integrate and maintain, slow to install, and often unavailable in hazardous or unmapped zones where reliable navigation is critical. Shifting to a resilient navigation system with less dependency on infrastructure offers a scalable alternative, enabling reliable navigation even in environments considered hazardous or inaccessible.
System Architecture
Advanced Navigation’s Hybrid Navigation System demonstrates long-range, infrastructure-free, real-time navigation in a deep, GPS-denied environment. The system combines a laser velocity sensor (LVS) with the Boreas D90 fiber-optic gyroscope inertial navigation system (FOG INS).
FOG INS. The Hybrid Navigation System is centered on the Boreas FOG INS. Unlike conventional systems, Boreas doesn’t rely on GNSS or magnetic compasses. Instead, it uses ultra-sensitive FOG technology to detect the Earth’s rotation and determine true north, a process known as gyro-compassing, to find the vehicle’s heading.
For the test, the Boreas D90, along with various additional equipment providing power, networking and logging capabilities, was secured inside the vehicle.
LVS. To maintain and enhance this accuracy, the INS is fused with Advanced Navigation’s LVS. Using infrared lasers, LVS continuously measures the vehicle’s true 3D velocity relative to the ground. This real-time data is critical for correcting the gradual drift that occurs in standalone inertial systems, enabling the hybrid system to maintain precision over extended distances.
The LVS sensor features two components: an external, passive optical head, and an active sensor body. The optical head is primarily responsible for rigidly holding the alignment between the three telescopes. The sensor body houses the active photonics system, laser and processing system.
Because pre-production hardware was used for this test, three discrete fiber-optic cables were used to connect the externally mounted LVS optical head to the LVS sensor inside the vehicle. Production hardware will include a single, IP69K rated optical-fiber cable that connects the LVS sensor body to the IP69K rated optical head.
The LVS optical head was attached to the trunk of the vehicle using a suction cup to provide a clear line of sight from each telescope to the terrain. A GNSS antenna was attached to the roof in the same manner. Coaxial cable connected the GNSS antenna to the Boreas D90.
Fusion Software. The system integration relied on the company’s AdNav OS Fusion software. Using adaptive algorithms, OS Fusion dynamically weighs the reliability of each sensor in real time.
Together, these technologies form a resilient hybrid system delivering precise, uninterrupted navigational data in extreme environments, without GNSS or fixed infrastructure, the company said.
“We were thoroughly impressed by the results the sensor fusion provided,” said Magnus Zetterberg, senior consultant at Combitech, who observed the demonstration. “I have used and been exposed to these sorts of sensors in other projects, and nothing has come close to this level of performance. It’s clear the Laser Velocity Sensor is a major key in providing these outstanding results.”
Proven in the Depths
A one-time surface calibration using real-time kinematic GNSS aligned the LVS and INS frames on the vehicle, a Mercedes-Benz V-class. After the calibration, the trials were unaided within the underground environment.
Two different test scenarios were conducted: a surface-to-surface test, and an underground loop test. Validated across five separate runs in isolation from external aids or maps, the Hybrid Navigation System repeatedly achieved an accuracy of better than 0.1% of distance traveled — demolishing a barrier once considered fundamental to underground navigation.
Without relying on any fixed positioning infrastructure, pre-existing maps or external aiding, the tests achieved consistent sub-0.1% navigation error across multiple runs.
Surface-to-Surface Runs
Runs 1, 2 and 3 – 400 m. To demonstrate the system’s repeatability and accuracy, three identical runs were conducted to a depth of 400 meters. Each run involved an approximate 3 km one-way traverse for a full 6 km loop. The results highlight the system’s consistent performance during underground operation, with a mean final position error of 2.83 ±0.09 meters, representing 0.047% of the total distance traveled.
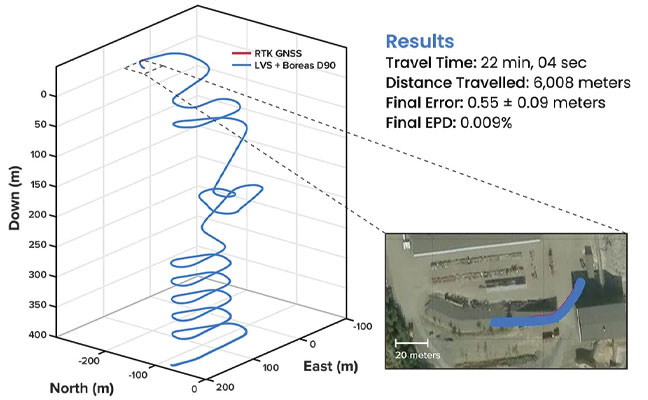
FIGURE 1 3D navigation trace of run 2 of the repeat surface-to-surface 400 m depth tests. This particular run covered 6,008 m, with a measured error of 0.55 ±0.09 m for 0.009% error per distance traveled.
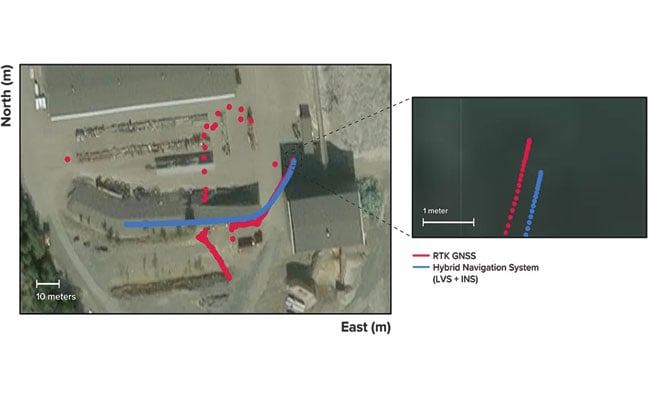
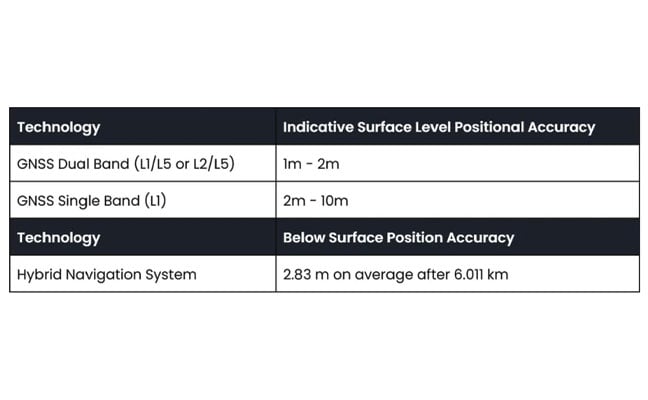
Over the 6 km rough and rugged terrain that extended 400 m below the surface, the system achieved a best-case 3D position error of 0.55 m (0.009%), with an average error of 2.83 m (0.047%). For context, standard single-band GNSS on the surface typically delivers 2–10 m accuracy in open-sky conditions. The system delivered significantly greater precision even within a subterranean labyrinth. FIGURE 1 present the key performance metrics for these runs. FIGURE 2 shows reacquisition of GNSS signals upon exiting the mine.
FIGURE 2 Traces of raw RTK GNSS and position estimates from the Hybrid Navigation System. As the vehicle exits the tunnel portal, intermittent and low accuracy GNSS is measured. Once the vehicle enters open sky, a more consistent RTK GNSS fix is attained. Note that despite the presence of now-accurate RTK GNSS, at no point did the Hybrid System use GNSS information.
“We’ve worked in underground environments for decades. Seeing this level of precision achieved on the first run signals huge potential for safer and more efficient underground vehicle operations,” said Olli Mylläri, vice president of technology at Normet, a mining technology company.
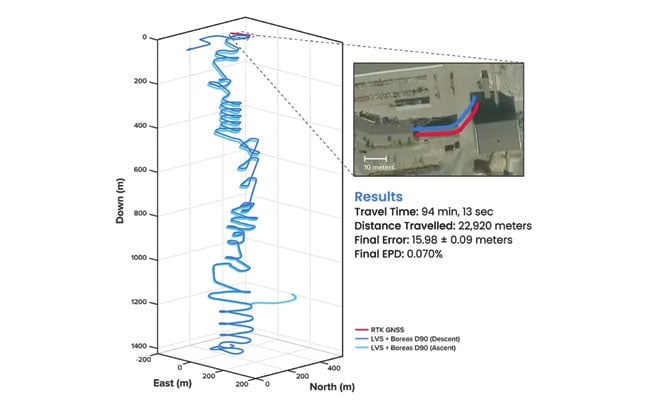
Run 4 – 1,400 m. To evaluate the system’s performance over an extended distance, a single run was conducted to the deepest accessible point of the mine, reaching a depth of 1,400 m. The system navigated the 22.9 km route — the equivalent of a half-marathon — in total darkness.
The final position error was 15.9 m (0.07%), showcasing its immunity to the drift that plagues other inertial systems. This extended traverse, lasting more than 94 minutes, also included a deliberate stationary period at the bottom before the return to the surface. The performance of this deep run is detailed in FIGURE 3.
FIGURE 3 3D navigation trace of the run down to 1,400 m depth. The test traversed a total distance of 22,920 m, with a measured final error of 15.98 ±0.09 m yielding an error per distance traveled of 0.070%. The descent and ascent paths are colored differently for disambiguation. During the ascent (light blue), the driver entered a side tunnel at a depth of approximately 1,200 m, which was not traversed on the descent.
Entirely Underground
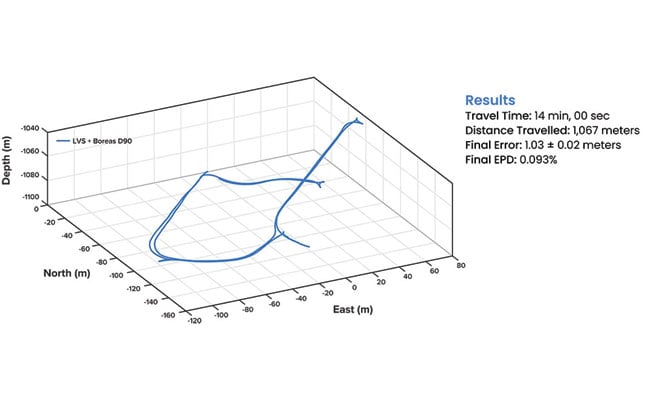
Run 5 – 1,067 m. A single run of 1,067 m was conducted over a period of 14 minutes. Without relying on magnetometers or external aids, the system determined heading using its built-in gyrocompassing procedure, measuring the Earth’s rotation to establish true north. It then navigated a 1 km course with just 1 meter of error, demonstrating its capability for rapid deployment in the most challenging and unfamiliar terrain. See results in FIGURE 4.
FIGURE 4 3D navigation trace of the entirely underground run. The test traversed a total distance of 1,067 m, with a measured final error of 1.03 ±0.02 m, yielding an error per distance traveled of 0.093%.
While additional testing was planned to further validate the results, time constraints limited this study to a single test. The findings provide a representative indication of system performance under the tested conditions. TABLE 1 shows a comparison to GNSS navigation.
TABLE 1 Indicative industry-reported positional accuracy of GNSS compared to the Hybrid Navigation System.
Scalable Autonomy
While mines will continue to use fixed infrastructure, this technology significantly reduces dependency, enabling resilient, high-precision navigation in previously inaccessible or unmapped areas. This performance marks a step change in underground navigation, unlocking new potential for fleet management, predictive collision avoidance, material tracking and scalable autonomy across mining operations.
“At Normet, we specialize in advanced solutions for underground mining and tunneling, so we know firsthand how difficult accurate and reliable navigation can be in these environments,” Mylläri said. “Seeing Advanced Navigation’s Hybrid Navigation System deliver consistent positioning with minimal infrastructure deep within the Pyhäsalmi Mine was remarkable. It’s a powerful step forward for automation and safety in the underground space.”
In today’s dynamic operational environments, relying on a single navigation technology is no longer viable. Robust navigation demands a layered, inertial-first and multi-sensor architecture — held together by intelligent software — that can adapt and scale to meet the unique demands of each operation.
“Ultimately, this vehicle-based, inertial-centered architecture provides the resilient foundation required for the mining sector to achieve its long-term goal: efficient autonomous ore extraction at depths hostile to human activity,” Vandecar said.
“Unreliable navigation underground isn’t a minor technical constraint — it’s a major operational bottleneck,” said Joe Vandecar, senior product manager, Advanced Navigation. “Maintaining precision over a 22.9 km subterranean course in Europe’s deepest underground mine demonstrates a level of performance that few systems in the world can rival without any prior intelligence of the environment. These results prove we’re one step closer to unlocking scalable underground autonomy.”
The Hybrid Navigation System is set for commercial release later this year.
Adapted from a paper authored by Patrick Wiltshire, David McManus, James Spollard, Mark Gibson, Matthew Suntup, Tim Laws and Lyle Roberts. The full paper is available on the Advanced Navigation website (advancednavigation.com).
The demand for efficient transportation systems extends beyond traditional development projects, such as subsea transportation tunnels or deployment scenarios where positioning technology delivers centimeter-level accuracy for fleet vehicles. In active conflict zones, positioning signals are more susceptible to jamming and spoofing, which disrupts civilians’ daily activities.
In the northern Israeli city of Haifa, after decades of relying on digital navigation, shopkeepers have started stocking paper maps again. The reason is not nostalgia, but survival in an age of electronic warfare.
The coastal city has become a testing ground for advanced GNSS technologies, where traditional satellite navigation systems regularly fail due to sophisticated spoofing attacks. These attacks not only disrupt military operations but also affect every smartphone, smartwatch and navigation device that relies on standard GPS signals.
Dror Meiri, business development and strategy advisor at oneNav, said that in Haifa, “You start driving. Everything is fine. You know that the drive is going to last for 37 minutes or so, and then all of a sudden, you lose your location.”
Researchers from oneNav conducted a comprehensive GPS resilience test in an active conflict zone near Haifa. The company’s mission was to compare how different navigation technologies perform when under electronic attack.
The Journey North
For the test, four devices were mounted side-by-side on a car dashboard: three leading smartphones and one device equipped with experimental L5-direct receiver technology. All four would make the same journey from south of Haifa toward the city center, passing through zones where GPS spoofing is known to occur.
The drive began in an area free from interference, where all devices accurately displayed their location in northern Israel. But as the car moved north toward Haifa, it entered what researchers describe as a “spoofed zone” — an area where military defense systems actively jam and spoof GPS signals.
While still physically driving through Haifa’s streets, the three commercial smartphones suddenly began displaying a location more than 100 km away in Beirut, Lebanon. A fitness smartwatch included in the test showed the same false location. Only the L5-direct enabled device maintained accuracy to within 1 m of the actual position.
The Technical Challenge
OneNav explains the vulnerability stems from the aging L1 GPS signal on which most consumer devices rely. First deployed decades ago, L1 signals are relatively easy to spoof with commercially available equipment. According to U.S. Federal Communications Commission (FCC) documentation, spoofing has become so prevalent that it affects devices across vast geographical areas; in some cases, every smartphone and smartwatch tested was spoofed across distances exceeding 120 km.
In response to the March 6 FCC inquiry on “Promoting the Development of Positioning, Navigation, and Timing Technologies and Solutions,” oneNav provided technical insights into spoofing vulnerabilities across different satellite navigation bands. The company explained that “spoofing in the L5 band will be much more difficult because the spoofing transmitter must have 10x wider bandwidth and 10x more precise spoofing correlator peaks to capture the L5 receiver. Spoofing transmitter power needs to be 20x higher in the L5 (GPS) band and 40x higher in the E5 band (Galileo) compared to spoofing L1C/A.”
This technical assessment highlights why the newer L5 signal represents a significant advancement in navigation security. The enhanced signal architecture, with its wider bandwidth and more sophisticated coding structure, creates substantial barriers for potential attackers. The exponentially higher power requirements — 20 times greater for GPS L5 and 40 times greater for Galileo E5 compared to legacy L1 signals — combined with the demanding technical specifications, make widespread L5 spoofing both technically challenging and prohibitively expensive for most threat actors.
Beyond the Battlefield
While Haifa’s situation is tied to regional security concerns, the implications extend far beyond conflict zones and affect autonomous vehicles, ride-sharing services, and logistics networks that have become essential infrastructure in modern cities.
“When I want to wait for a bus or public transportation, for gas or something like that, my phone tells me exactly where the bus is and how long it will take to reach the station,” Meiri said. “But the core system for that is the GPS, which is based on the bus, so the bus cannot send the right information to the server.”
Local businesses are grappling with the unreliable GPS environment. According to oneNav researchers, companies in the region — including one that uses drones to clean windows on Haifa’s skyscrapers — face significant operational challenges when their navigation systems are deceived into believing they are operating in a different country entirely.
Meiri, who conducted the oneNav test, notes the challenging conditions affecting transportation in Haifa could emerge in other urban areas as spoofing technology becomes more accessible.
The ground transportation implications are particularly concerning for emergency services. When 911 calls are placed in areas experiencing GPS spoofing, emergency responders may be directed to locations hundreds of kilometers from the actual emergency. This challenge has prompted regulatory discussions about upgrading emergency location accuracy requirements. Current GPS emergency location systems can achieve accuracy within 50 m in ideal conditions, but dense urban environments and electronic warfare zones significantly degrade this performance.
As spoofing technology proliferates beyond military applications, transportation systems worldwide may face the same navigational chaos currently seen in Haifa.
Industrial computing specialist Gateworks Corp. has developed a comprehensive solution that brings centimeter-level positioning accuracy to smart transportation.
Based in Vista, California, Gateworks specializes in industrial-grade single-board computers and wireless communication solutions for embedded systems, serving sectors including smart transportation, smart factories and railway systems.
Application developers working in smart transportation and industrial automation face increasing pressure to deliver solutions that combine high-precision GNSS positioning in variable outdoor environments with secure, low-latency wireless connectivity. The hardware must be rugged enough for harsh conditions while remaining compatible with diverse wireless standards.
Compliance and Reliability
Gateworks addressed these challenges by developing a modular, all-in-one evaluation platform and high-performance single-board computer development kit. The solution integrates u-blox ZED-F9P precision GNSS receivers, NINA-B301 Bluetooth Low Energy modules and Point One Navigation’s PointPerfect Flex GNSS correction services into one platform.
The core components include the GW16143, a Mini PCIe card that integrates the u-blox ZED-F9P receiver to deliver positioning accuracy of less than 2 cm. The complete GW7200 Development Kit combines the Venice single-board computer with the GW16143 card, GW16132 wireless module and a one-month trial of PointPerfect Flex correction services, along with all accessories needed for immediate evaluation.
This approach allows application developers to easily evaluate and deploy precise, real-time positioning and connectivity for smart transportation use cases without extensive integration work. PointPerfect Flex correction data eliminates the need for base stations while maintaining centimeter-level accuracy, which can be particularly valuable for fleet tracking, rail monitoring, health and safety applications, and autonomous vehicle systems. The wireless connectivity ensures correction data reaches GNSS receivers in real-time, enabling continuous high-precision positioning even in remote locations where cellular coverage is available.
Safety Across Sectors
Modern fleet safety systems leverage Gateworks single-board computers to enable edge artificial intelligence processing that analyzes driver behavior and road conditions directly on the device. Modern fleet safety systems leverage Gateworks single-board computers to perform edge artificial intelligence processing, which analyzes driver behavior and road conditions directly on the device. This approach can lower latency compared to cloud-based systems and offers instant alerts for drivers and fleet managers to quickly respond to unsafe driving behaviors. alert mechanisms for drivers and fleet managers to promptly address unsafe driving practices.
Process data in real time boosts driver safety through proactive monitoring. This results in fewer accidents and lower costs, while also helping compliance with transportation rules. Fleet operators notice notable improvements in safety performance and operational efficiency when they adopt edge-based monitoring systems.
In the rail industry, Gateworks single-board computers facilitate continuous infrastructure health monitoring through connected sensors that assess track conditions, vibrations and environmental factors. The systems also enable real-time location tracking of maintenance-of-way crews to ensure safety and efficient deployment of personnel. According to Gateworks, operators particularly value the enhanced coordination and safety benefits for on-site personnel working in potentially hazardous environments.
For decades, GPS has been the cornerstone of modern navigation, guiding aircraft, vehicles, troops and commercial systems across the globe. As digital warfare intensifies, satellite signals are increasingly unreliable. From the battlefield to underground tunnels, to dense forests, and urban canyons, global positioning signals are being jammed, spoofed, or simply blocked by the environment. In these GPS-denied zones, the risks to navigation, targeting and mission success grow exponentially.
Without reliable positioning, systems lose their sense of location, direction and speed — making it impossible to navigate to their destination. Yet in modern warfare, autonomous systems and industrial automation depend on precise and continuous navigation. ANELLO Photonics is tackling this gap head-on with a breakthrough silicon photonics-based optical gyroscope (SiPhOG) technology — one that seeks to reshape how machines, soldiers and vehicles navigate across land, air and sea when satellites fall silent.
A Battlefield Blind Spot
In GPS-contested environments such as urban warzones, subterranean tunnels, dense forests or near hostile jamming equipment, traditional navigation solutions fail. Spoofing attacks can instantaneously displace autonomous vehicles by kilometers. Jamming can cripple UAVs mid-flight, causing them to crash. Even in civilian settings — especially in and around conflict zones — GPS signal loss can disrupt commercial fleets, emergency responders, and industries like mining or agriculture. These dropouts stall autonomous operations, reduce productivity, and increase the risk of severe damage.
These issues aren’t hypothetical. Adversaries have demonstrated sophisticated GPS interference capabilities that can mislead or immobilize multi-million-dollar defense assets. The need for self-contained, spoof-resistant navigation has never been more urgent.
Strategic-Grade Precision in a Chip
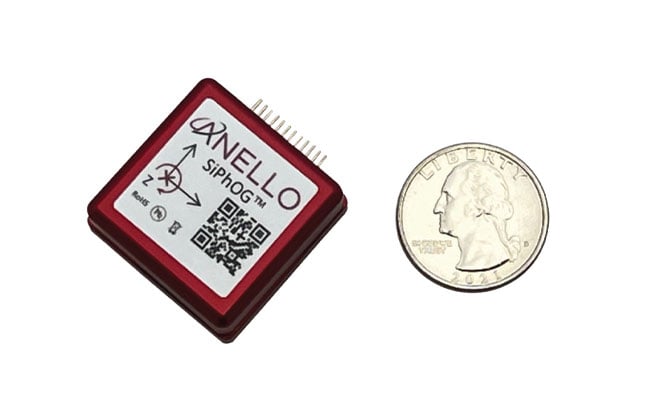
ANELLO Photonics took a radically new approach to building gyroscopes when it built its Silicon Photonics Optical Gyroscope (SiPhOG) using the same semiconductor processes used for integrated circuits. This breakthrough makes it possible to deliver high-precision optical navigation in a chip-scale form factor — smaller than a fingernail. The SiPhOG harnesses the proven Sagnac effect — central to traditional fiber-optic gyroscopes (FOGs) — but ANELLO has reimagined it using advanced silicon photonics, integrating this into a compact silicon photonic chip.
This innovation enables:
Bias drift < 0.5°/hr. A performance level previously only achieved by large, costly fiber-optic systems.
Nanoradian-scale angular sensitivity. Essential for accurate navigation over long durations.
Superior to MEMS. Resilient to vibration, thermal variation and EMI — ideal for combat zones and industrial environments.
Compact, coin-sized form factor. Easily integrates into existing systems and is small enough to be used for soldier-worn devices, embedded robotics and scalable mass-market applications.
The ANELLO SiPhOG offers the precision of strategic-grade FOG systems, but with the size, weight, power and cost suitable for widespread tactical deployment to the mass market. This balance makes it uniquely positioned to serve both high-end defense missions and cost-sensitive commercial markets.
The Full-Stack INS Advantage
SiPhOGs alone aren’t enough. ANELLO integrates its SiPhOGs with accelerometers, magnetometers, GPS (when available) and onboard CPU logic into a full-stack inertial navigation system (INS). Additionally, these systems use the ANELLO AI-based sensor-fusion engine to intelligently reconcile data, validate signal integrity and detect anomalies, such as jammed or spoofed GPS locations or signal dropouts across land, air and sea. The ANELLO AI sensor-fusion engine processes and tracks in real time the inertial position and GPS position every ~10 ms. The system auto-corrects and seamlessly transitions the sensor modes without any human intervention — always determining what is correct and what is false or being spoofed. The ANELLO AI sensor-fusion engine is continuously being tested and optimized by the ANELLO team with various customers in the field.
The result is a self-contained, intelligent navigation platform that maintains accurate heading, velocity and position — even in total GPS darkness. The modularity of the ANELLO systems also enables easy integration into various host platforms, from aerial drones to armored vehicles to autonomous boats and robots.
Field-Proven Resilience in Defense
During U.S. Department of Defense trials, ANELLO’s INS systems successfully identified and mitigated GPS spoofing attempts in real time. When a vehicle’s GPS feed suddenly shifted its perceived location by kilometers, ANELLO’s AI engine flagged the change as physically impossible, rejected the GPS input and seamlessly relied on ANELLO inertial data to maintain accurate positioning.
Such robustness makes the ANELLO technology suitable for:
UAVs operating in jammed or contested airspace
Autonomous Ground Vehicles (AGVs) navigating GPS-denied terrain • Marine systems facing jammed or spoofed GPS signals
Land vehicles such as emergency responders and even delivery vehicles
Handheld soldier systems that demand compact, rugged navigation capabilities for on-the-move operations.
Whether installed on armored vehicles, on drones, or embedded in next-gen infantry kits, ANELLO’s optical gyro-based solutions deliver location certainty when precision and accuracy matter.
Cross-Sector Use Cases
Autonomy Without Satellites: While defense remains a clear application, the broader commercial value is just as transformative. In agriculture, autonomous vehicles often lose GPS coverage under thick orchard canopies. In underground mines or port operations, satellites are blocked entirely. In these environments, ANELLO’s SiPhOG-powered INS continues to provide reliable localization and position, ensuring autonomous systems don’t stall, stray or crash.
Commercial applications for ANELLO’s SiPhOG technology include:
Autonomous mining vehicles. Enables self-driving trucks and loaders to navigate through tunnels and signal-blocked environments with precision and safety.
Port automation and crane systems. Supports operation of automated cranes and cargo movers in GNSS-challenged port environments for uninterrupted container handling and improved throughput.
Industrial robotics and logistics. Powers warehouse robots and inspection systems with high-precision navigation in indoor and metallic environments where GPS is unreliable or unavailable.
Autonomous maritime systems. Facilitates reliable navigation for unmanned surface vessels (USVs) and autonomous underwater vehicles (AUVs) operating in coastal, harbor, or fully submerged missions where satellite signals are compromised.
With rapid integration into commercial drones, robotic forklifts and construction fleets, ANELLO is extending military-grade navigation into everyday autonomy use cases.
Smarter Navigation in Real Time
At the heart of ANELLO’s platform is a sophisticated AI sensor fusion engine. Every 10 ms, the system ingests data from multiple sensors, validates physics-based plausibility and recalibrates its state estimates. This allows the system to detect and reject spoofed GPS signals, continue navigation autonomously through temporary GPS dropouts and identify signal degradation before failure occurs.
This intelligence is what makes the system robust, not just a fallback, but a fully capable primary navigation method in harsh and dynamic environments. It also significantly reduces the operational risk and support burden typically associated with traditional inertial systems.
Compact, Scalable, Mission-Ready
As conflicts evolve and global infrastructure expands into GPS-hostile regions, inertial systems must become smaller, smarter and more affordable. ANELLO is advancing a roadmap toward fully integrated, chip-scale INS platforms with gyros, lasers, processors and algorithms all on a single platform. This enables faster deployment in the field, lower system power consumption and broader adoption across vast use cases for military and industrial systems.
The company’s domestic chip fabrication capability also ensures supply chain security, an increasingly critical factor in national defense and industrial automation strategies. From soldier systems and UAVs to autonomous cargo vehicles and industrial robots, ANELLO’s technology is positioning itself as a cornerstone for resilient, GPS-independent autonomy.
Navigatng a Standard for a Contested World
The future of autonomous operations—military and civilian alike—will need to depend on navigation systems that do not falter when GPS disappears. With its SiPhOG-based inertial platform, ANELLO Photonics is offering not just a backup system, but a new standard: one that combines strategic-grade precision, compact design and AI-driven reliability that can be delivered to the mass market and installed into any vehicle or any moving platform.
In an era where signal denial is not just a threat but a tactic, assured positioning is no longer optional—it’s essential. ANELLO is redefining the future of navigation, empowering not just autonomous systems but also the people who rely on navigation to operate with confidence and precision — anywhere, anytime — even when the sky goes dark.