Trimble has begun collaborating with the Indian Institute of Technology in Kanpur (IIT Kanpur) to support a new UAV program offered by the Department of Aerospace Engineering.
Under the partnership, Trimble will provide the institution with direct georeferencing (DG) products for UAV survey and mapping, including a suite of Applanix board sets and supporting processing software. Trimble will also provide training and support to educate the UAV engineering team on how best to integrate and use the products within their teaching curriculum.
India is projected to be the fastest-growing UAV market by 2025, according to a recent report by PricewaterhouseCoopers.
The collaboration is designed to help the country develop local expertise in using UAV georeferencing best practices while providing future generations with the knowledge and capabilities to work with the latest UAV technology.
IIT Kanpur was declared an Institute of National Importance (INI) by the Government of India under the Institutes of Technology Act. With a dedicated program for UAV education, it receives government funding to develop UAV technology and build out labs to support student training and research. IIT Kanpur’s researchers are credited with creating the first solar-powered UAVs developed in India, named MARAAL-1 and MARAAL-2.
Qualinx, a company specializing in ultra-low power wireless tracking and connectivity semiconductors, has announced a partnership with the European Union Agency for the Space Programme (EUSPA). This collaboration, under the Fundamental Elements EU R&D funding mechanism, aims to develop a consumer-grade, low-power GNSS receiver for EUSPA’s GNSS authentication service.
The project focuses on the Galileo Open Service Navigation Message Authentication (OSNMA) service, which is designed to verify that users are receiving data from Galileo satellites. This service was introduced in response to an increasing number of spoofing incidents. Qualinx was selected for this project following a six-month selection process conducted by EUSPA.
Qualinx’s technology, known as digital radio frequency (DRF), transforms most analog functions of a wireless chip into digital circuits, which can be customized for each application through software. This technology is designed to reduce power consumption compared to traditional GNSS receivers. The company aims to provide smaller, more cost-effective solutions while extending the operating life of battery-powered navigation devices.
Representatives from organizations involved in the UK Sovereign Satellite Based Augmentation System. (Image: Viasat)
Viasat, a global communications company, has successfully demonstrated the UK Satellite-Based Augmentation System (UK SBAS) during a recent test flight. This demonstration, conducted as part of an ongoing trial funded by the Department for Transport through the European Space Agency (ESA), showcased the potential of UK SBAS to provide accurate GPS data to improve safety and operational efficiency.
“The trial on a sovereign UK SBAS is all about delivering trust. Trust for pilots in their tracking systems to stay safe in challenging conditions. Trust for the aviation industry more broadly so it can rely on data to operate more efficiently,” said Todd McDonnell, president, international government, Viasat.
The test flight, carried out from Cranfield Airport using the National Flying Laboratory Centre’s Saab 340B aircraft, demonstrated the capabilities of a UK-based SBAS to deliver more precise and reliable navigation data. With the UK no longer part of the EU’s European Geostationary Navigation Overlay Service (EGNOS), the trial aims to pave the way for a complementary UK SBAS, specifically designed for critical safety-of-life navigation services across air, land and sea.
UK SBAS operates by merging ground monitoring data with satellite connectivity, which offers positioning accuracy down to a few centimeters. The system aims to significantly enhance safety in aviation by providing pilots with confidence in their onboard instruments, particularly during challenging weather conditions where visibility may be limited.
The successful aviation test marks a crucial step in further trials across various transport applications, including rail, unmanned aerial vehicles, and autonomous road vehicles, said Viasat.
Fully funded by the government through ESA’s Navigation Innovation and Support Program (NAVISP) program, the trial aligns with broader efforts to deliver high-accuracy, high-integrity positioning services to boost efficiency and innovation across the transport network.
The U.S. Department of Transportation (DOT) has approved $2.5 billion worth of bonds to help fund the Brightline West high-speed rail project connecting Las Vegas, Nevada, and Southern California.
The 218-mile line, estimated to cost $12 billion in total, will run along the I-15 median with electric trains capable of running at 186 mph.
The DOT previously approved private activity bonds of $1 billion for the project in 2020. The second tranche of private activity bonds brings the total to $3.5 billion. In December 2023, the DOT also awarded a $3 billion grant from President Biden’s infrastructure law to the Nevada DOT for the project.
In June 2023, DOT awarded a $25 million grant to San Bernardino County Transportation Authority (SBCTA) through the Rebuilding American Infrastructure with Sustainability and Equity (RAISE) Program to be used for the construction of the Brightline West stations in Hesperia and Victor Valley, California.
Brightline West is expected to break ground in early 2024.
Three U.S. service members were killed and dozens wounded during a UAV attack on U.S. forces stationed in northeastern Jordan near the Syrian border, President Joe Biden and U.S. officials said on January 28.
Biden blamed Iran-backed groups for the attack, the first deadly strike against U.S. forces since the Israel-Hamas war erupted in October 2023 and sent shock waves throughout the Middle East.
“While we are still gathering the facts of this attack, we know it was carried out by radical Iran-backed militant groups operating in Syria and Iraq,” Biden said in a statement.
At least 34 personnel were being evaluated for possible traumatic brain injury, a U.S. official told Reuters, speaking on the condition of anonymity. Two officials said some wounded U.S. forces were medically evacuated from the base for further treatment.
The Islamic Resistance in Iraq – an umbrella organization of Iran-backed militant groups — claimed attacks on three bases, including one on the Jordan-Syria border.
The attack is a major escalation in the already tense situation in the Middle East, where war broke out in Gaza after the Palestinian Islamist group Hamas attacked Israel on October 7, killing 1,200 people. Israel’s subsequent assault on Gaza has killed more than 26,000 Palestinians as of January 2024, according to the local health ministry.
Since then, U.S. forces have come under attack more than 150 times by Iran-backed groups in Iraq and Syria. U.S. warships have also been fired at by Iran-backed Houthi forces in Yemen, who are regularly attacking commercial ships passing through Red Sea waters off Yemen’s coast.
While the United States has maintained an official line that Washington is not at war in the region, it has been retaliating against the Iran-backed groups in Iraq and Syria and carrying out strikes against Yemen’s Houthi military capabilities.
Referring to the fallen soldiers, in his statement released by the White House Biden said: “We will carry on their commitment to fight terrorism. And have no doubt — we will hold all those responsible to account at a time and in a manner of our choosing.”
GMV and Astroscale UK are collaborating on a new project under the European Space Agency (ESA) collision risk and automated mitigation (CREAM) program. The project aims to transform satellite collision avoidance by using Galileo Signal-in-Space (SiS) capabilities.
As low-Earth orbits (LEO) become increasingly congested, satellite operators face difficulties efficiently carrying out collision avoidance maneuvers. In response, the ESA launched the project to explore alternative paths for late collision avoidance maneuvers. The collaboration uses the Galileo Return Link Service to improve the way satellites respond to collision risks.
Traditionally, communication with satellites for collision avoidance maneuvers has been constrained by the limited availability of ground station access. This limitation forces satellite operators to delay crucial avoidance maneuvers while relying on the final passes of ground stations.
GMV’s solution offers an alternative pathway for late maneuver commanding, designed to reduce the wait time for initiating collision avoidance. The initiative proposes a continuous and reliable communication path by using the Galileo, SiS and its Return Link Service. This approach allows for the seamless relay of collision avoidance maneuver decisions to satellites equipped with onboard Galileo-compatible GNSS receivers.
The Galileo system in this role also opens the door to potential synergy with other space situational awareness (SSA) services, such as the European Space Surveillance and Tracking (EU SST). According to GMV, this strategic collaboration could potentially set the foundation for a globally available collision avoidance service.
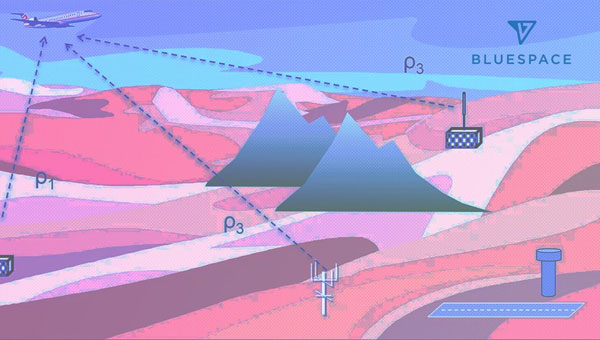
BlueSpace.ai, a Silicon Valley-based company specializing in off-road and unstructured autonomy, has released its assured positioning, navigation, and timing (A-PNT) solution. The solution — called BlueSpace Positioning Solution (BPS) — illustrates how artificial intelligence (AI) can enhance navigation precision in GPS-denied and GPS-degraded environments for both manned and unmanned vehicles.
BPS is designed to address the challenges posed by weak GPS signals, susceptible to jamming, spoofing and unintentional blockages in various environments. It can support a cross-track error, or drift error, of less than 0.3%. This surpasses the industry standard of approximately 1% error over distance traveled. BPS also aims to maintain high performance while using industrial-grade inertial measurement units (IMUs), which leads to improvements in size, weight and power (SWaP).
The AI solution is designed to eliminate geofence limitations and remove dependencies on prior training data and ultra-HD mapping.
BlueSpace.ai has participated in a variety of defense and commercial applications, including applications in challenging underground mining environments, truck and bus automation and off-road autonomy.
A street in Pompeii shows the structures that were remarkably preserved after Mount Vesuvius covered the city in ash in 79 CE. Everything about Porta Nocera, Region I 14 is being digitized by archaeologists. (Image: Allison Emmerson)
At the edge of Pompeii, along a city gate known as the Porta Nocera, professor Allison Emmerson of Tulane University directs a team of archaeologists. The famous Roman city, frozen in time when Mount Vesuvius erupted and covered it with ash, continues to reveal new insights to archaeologists nearly 275 years after the site was first discovered.
Within a building long believed to be a home around 2,000 years ago, the team unearthed a different story — one unraveling traces of economics, urban design, and social life among an elite and a lower class. To tell the story, Emmerson and her team have created a location-aware digital twin of the excavation site, which incorporates 2D maps, smart maps, and 3D models. The team is also able to share live data via a fully digital workflow using iPad Pros and Apple Pencils.
Revolutionary documentation with mobile app workflows
The latest geographic information system (GIS) technology allows Emmerson’s team to digitize everything they unearth at Porta Nocera, Region I Insula 14 as part of the Pompeii I.14 Project run by Tulane.
The team first used UAV imagery, terrestrial photography, and a technique called structure-from-motion photogrammetry to create a base map and 3D base model of the site. They then used tablets loaded with GIS apps to layer data over that 3D base model.
Leading the GIS data collection workflow is professor Alex Elvis Badillo, cohead of the project’s digital data initiatives team. Badillo said the archeologists use GIS documentation on the iPad Pro to record and explore data in layers to avoid information destruction.
Using ArcGIS Survey123, the team can share data on-site and implement paperless workflows. That data can also be linked to digital ArcGIS Dashboards to keep track of progress and foster collaboration during the excavation.
Interpreting the dig site
Emmerson and her team determined that the structure they initially uncovered was used for commercial activity such as shopping and dining, often identified with the lower classes at the time. Meanwhile, an elite residence was located right next door and the two buildings shared resources.
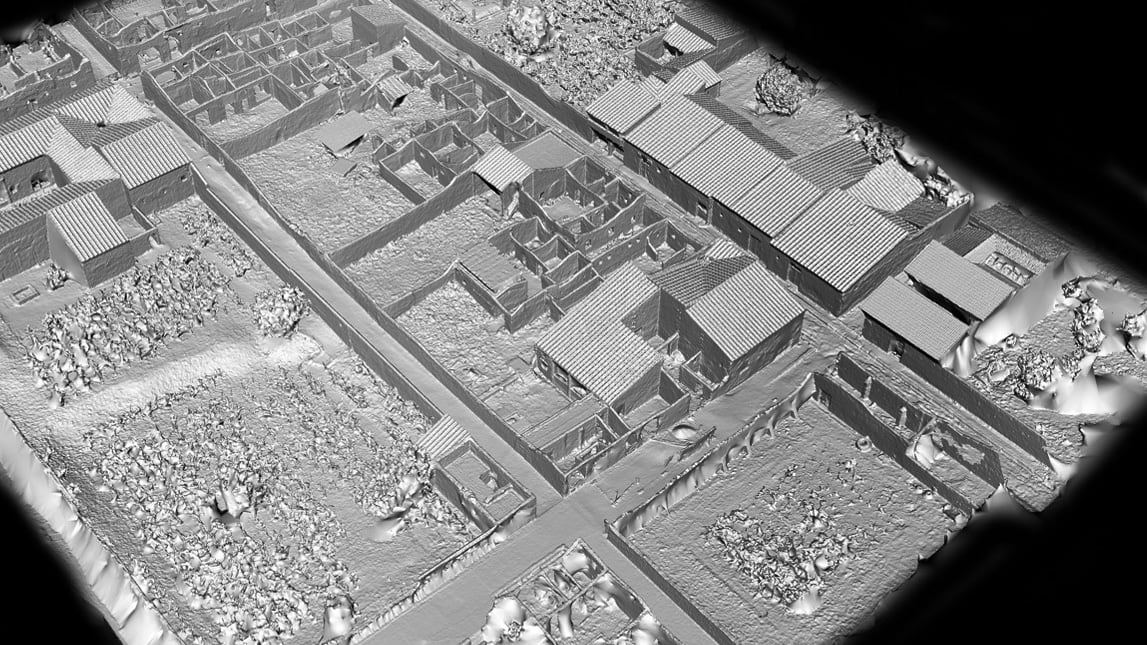
Lidar (light detection and ranging) uses laser light to densely sample the surface of the Pompeii I.14 site, producing highly accurate x,y,z measurements that provide the foundation for the digital twin. (Image: Allison Emmerson)
The Pompeii I.14 Project is ongoing. Once it is complete, the data will be incorporated into a larger digital twin from the Pompeii Bibliography and Mapping Project (2017) led by Eric Poehler, an associate professor of Classics at the University of Massachusetts Amherst. It will also be added to Pompeii’s central archaeology database and be available to policymakers, educators, archaeologists, and the public.
Researchers hope that a new understanding of the economic and social life of an ancient city such as Pompeii can not only inform us about the past but also help us create a better future.
UAV imagery draped over the lidar data provides a photorealistic surrogate of the Pompeii I.14 Project site, which serves as the centerpiece for project data collection. (Image: Allison Emmerson)
Point One Navigation has expanded its Polaris real-time kinematic (RTK) location network to South Korea.
The network is set to provide comprehensive coverage throughout the country. Existing Polaris customers can use the South Korean integration to enhance the precision and efficiency of their location-based projects.
Polaris offers centimeter-level accurate GNSS positioning with accuracy ranging from 1 cm to 10 cm, which makes it ideal for challenging environments, such as urban areas with limited sky view. Unlike standard GNSS systems — which face position uncertainty due to atmospheric signal delay, satellite orbit variation, clock drift and signal multipath — the Polaris network counters these issues using additional information from compact base stations.
Point One’s FusionEngine software further integrates inertial measurement, wheel odometry and additional sensors to achieve the desired level of precision in the complete absence of satellite signals.
The Polaris network with FusionEngine software can be used as a precision location service for autonomy and robotics applications. Polaris supports all major GNSS constellations and has an extremely dense global network of base stations that cover the United States, Europe, New Zealand, South Korea, and parts of Canada and Australia.
Developers can integrate the Polaris RTK network and FusionEngine software using GraphQL API. The network can be built into demanding applications such as industrial autonomy, precision agriculture, logistics and delivery, robots and advanced driver-assistance systems (ADAS).
On December 5, in Houston, at a reception hosted by the Resilient Navigation and Timing Foundation to celebrate GPS’ 50th anniversary, I had the honor of publicly interviewing Dr. Bradford Parkinson for 45 minutes. When I asked him how GPS today differs from the design that emerged from the Lonely Halls meeting he chaired 50 years ago this past September, he replied, proudly, that “there is no fundamental difference.” Recently, he recalled, he pulled out for the first time in 20 years a handheld Trimble EnsignGPS — “It was one of those little devices that got shipped to the Iraq War,” he noted —, cleaned its contacts, changed its batteries, turned it on, and was immediately able to navigate. “The point of the story,” Parkinson said, “is that evidently it still works.”
When I asked him what he considered to be the most significant impact of GPS on society, he said it was “also probably the most perilous: kids today just take it for granted. They know where they are.”
Taking GPS for granted, however, is not limited to kids today. It is a pervasive attitude throughout our society, including sectors of the federal government that ought to know better. That is why a recurrent theme throughout the 29th meeting of the National Space-Based Positioning, Navigation, and Timing Advisory Board, on December 6 and 7, which I attended, was raising the alarm about the fact that GPS is falling behind Galileo and BeiDou.
“We must attack this mindset [that GPS is] the Gold Standard and everything is OK. It is not OK,” said Admiral Thad Allan, a former Commandant of the U.S. Coast Guard, who chairs the PNT Advisory Board. Perhaps, he suggested, it is time to declare that GPS is only meeting “the Pewter Standard” for GNSS. “That will get the attention of somebody who does not understand this.”
Parkinson, in emphasizing the urgency of the problem, said that he currently counts eight areas in which GPS is falling behind its GNSS counterparts, including:
L5, the go-to signal particularly for civilian aviation, is not yet activated and will not be until the next three satellites are activated, which will likely not happen for at least another year.
The Next Generation Operational Control System (OCX), the future version of the GPS control segment, is not yet operational.
GPS does not have a satellite-based high-accuracy service (HAS). On this, he said, “Everyone is moving out except us.”
GPS lacks anti-spoofing authentication, which Galileo has.
Additionally, “every one of these things has an enormous lead time,” Parkinson warned.
“As an advisory group, we are only as effective as the willingness of the system that we are advising to act on what we say,” Allan pointed out. The Advisory Board spent the final portion of its meeting discussing how to structure the agenda and products of its next couple of meetings to get these issues with GPS the attention they deserve and require. Stay tuned.
DJI has launched DJI Modify, its first intelligent 3D model editing software.
The solution can be integrated seamlessly with DJI’s enterprise UAVs and 3D modeling and mapping software, DJI Terra. When integrated with these products, the software can be used for aerial surveying, transportation and emergency responses.
Seamless workflow with DJI Terra
DJI Modify paired with DJI Terra offers users an end-to-end solution from modeling to model editing. Once DJI Modify has been enabled, DJI Terra files for model editing are automatically generated, including pre-identified objects and pre-processing of the model. It is designed to make repairing common 3D model defects seamless and efficient. As of early 2024, DJI Modify will only support repairing models built by DJI Terra.
Efficient 3D model editing
DJI Modify allows for model files to be quickly imported and exported to the DJI Terra and other third-party software. In the future, processed models can be shared to the cloud for online viewing and sharing via links without software installation, DJI said.
DJI Modify’s intelligent auto-repair editing supports flattening, editing textures, repairing water surfaces, removing floating parts, and filling holes. Edits can be made using one-click repairs or manually by selecting custom polygons, areas or meshes.
The software’s smoother model display technology allows high- and low-quality models to be viewed and edited in a single interface. Changes made can be synchronized across both models and previewed immediately, which allows users to address model editing issues in real-time.
NASA researchers at Langley Research Center in Hampton, Virginia, have successfully flown multiple UAVs beyond visual line of sight (BVLOS) with no visual observer. The UAVs dodged one another and successfully maneuvered around obstacles before safely landing, the agency said. NASA conducted the tests to help researchers someday create autonomous, self-piloted helicopters that could carry passengers and cargo through busy aerospace.
Researchers used multiple Alta 8 UAVs loaded with software designed to enable autonomous flights. Although monitors observed the flights from a remote-control room at Langley, the UAVs successfully operated BVLOS.
NASA is also testing elements of autonomy using helicopters. They are designed to contribute towards the development of autonomous helicopters that can take off and land from “vertiports,” and transport passengers and cargo over both short and long distances.
The experiments are part of the agency’s Advanced Air Mobility Mission (AAM), which is designed to enable safe autonomous flight and integrate newly developed vehicles into the national airspace. The mission will “set the stage for a flourishing industry” of electric air taxis and UAVs by 2030, NASA says on its AAM website.
NASA will transfer the technology created during this project to the public to ensure industry manufacturers can access the software while designing their vehicles.