The annual European Navigation Conference (ENC23), set for May 31-June 2, will be hosted by the European Space Agency (ESA) at its ESTEC facilities in Noordwijk, The Netherlands. Full papers need to be submitted by May 15.
This year’s conference will focus on resilient navigation. Organized by The Netherlands Institute for Navigation, the conference will address resilience in a broad sense, including navigation sub-functions, operational routines, standards and policies.
The ENC23 tech committee has broken down the overarching theme into a range of topics, including integral end-to-end navigation solutions, specifics in position, navigation and timing, routing, data integrity questions and more.
Registration is open until May 21. For more information, visit the ENC23 website.
Xona is developing PULSAR – a high-performance positioning, navigation and timing (PNT) service enabled by a commercial constellation of dedicated LEO satellites.
“Our Skydel GNSS simulation engine will provide support for Xona’s PULSAR signals and satellite constellation to offer OEMs, developers, and integrators a unique tool that enables early testing and validation of Xona’s LEO PNT signal performance,” Pierre-Marie Le Véel, GNSS products director with Safran, said.
The PULSAR service aims to advance PNT security, resilience and accuracy capabilities by augmenting existing GNSS while also operating as an independent PNT constellation.
Skydel powers Safran’s advanced GNSS simulators such as GSG-8.
One of a small army of PhytoPatholoBots (PPB) developed by Cornell University and deployed to four grape breeding programs across the United States. These autonomous robots will roll through vineyards, using computer vision to gather data on the physiological state of each grapevine. They use a NovAtel SMART antenna. (Image: Allison Usavage / Cornell University)
One GNSS receiver widely used in autonomous ground vehicles is Hexagon | NovAtel’s SMART7 antenna. Matteo Luccio, GPS World’s editor-in-chief, discussed the product and its applications with Haley Lawrance, Senior Positioning Product Manager, Agriculture for Hexagon | NovAtel.
Luccio: “How do you differentiate your SMART antennas from your other GNSS receivers?”
Lawrance: “The reason why the SMART antenna portfolio has been so attractive within the agriculture market and to our autonomy customers specifically, has been the ease of integration and the high performance it provides. GNSS positioning is just one part of an autonomous system, and the autonomous integrators don’t necessarily have the volume of machines out of the gate that would justify the development time for them to integrate the OEM components.
With NovAtel’s SMART antennas, they only need to consider the single cable harness that will run power and communications to and from the receiver – and a single mount point on the vehicle. The SMART antennas offer a waterproof and rugged enclosure, designed to withstand the demanding environments typical for agriculture – and help accelerate our customers’ time to market.”
Luccio: “Is there some standard, as there is for cars, that enables developers of autonomous systems to easily plug your system into theirs?”
Lawrance: “We support a variety of communication protocols – serial, CAN, Ethernet, and Wi-Fi. For autonomy, Ethernet tends to be the most common option for communication with the GNSS receiver – especially when using features that require more bandwidth, such as our SPAN GNSS+INS sensor fusion solution that leverages an inertial measurement unit.
NovAtel’s_OEM7_driver, built for the Robot Operating System (ROS), is a great option because it makes it even quicker for them to integrate and allows the receiver to essentially plug-and-play into the ROS environment with minimal development. For CAN, we support both J1939 Transport and Extended Transport Protocol and NMEA 2000 if they would like to communicate onto an existing bus they are using on the vehicle.”
Luccio: “What about the ease of integration on the software side?”
Lawrance: “We have a very large library of proprietary NovAtel-formatted logs that are available in binary and ASCII, which provide flexibility and allow customers to customize a unique set of logs that provide the data they are interested in. This could be anything from information on which satellites are being used in the solution, to the roll and pitch of the vehicle, or status information from the receiver. NovAtel receivers also output in standard formats, such as NMEA 2000 and NMEA 0183, that consolidate the data that they are most likely to need, such as position, velocity, and quality indicators.”
Luccio: “What markets do your SMART antennas target?”
Lawrance: “Broadly speaking, the SMART antenna product line was designed specifically for agriculture use cases and environments. Customers include agriculture OEMs, aftermarket integrators that develop retrofit precision ag solutions, and autonomous solution providers.
Within that product line, we have SMART7 and SMART2, with different performance options that allows us to scale the best product solution for each application. For high-performance semi-autonomous or autonomous applications that need centimetre-level accuracy – even in highly variable terrain and challenging GNSS-obstructed environments, SMART7 is the best fit – together with SPAN GNSS+INS and TerraStar-C PRO Correction Services or RTK.
For additional positioning redundancy on an autonomous vehicle, SMART2 can be used together with SMART7 – meaning there are two different, independent GNSS hardware, software, and positioning solutions running in parallel. This allows autonomous machinery manufacturers to utilize both positioning solutions in parallel for an additional layer of protection.”
While on public roads self-driving cars are still years away, autonomous systems are already common in much less congested and/or much more controlled environments — such as farm fields, ports, mines, rivers, and in the air — where the risk of a collision causing injuries or fatalities is smaller by orders of magnitude. From unmanned aerial vehicles (UAVs) taking aerial photographs, to unmanned ground vehicles (UGVs) spraying vineyards, to unmanned surface vessels (USV) conducting hydrographic surveys, autonomous or semi-autonomous systems are generally much safer, more efficient, and cheaper to operate than their manned counterparts.
Whether they have wheels, hulls, or wings to properly perform their tasks, autonomous systems need to know — with great accuracy — their position, heading and attitude (roll, pitch, yaw, surge, sway, and heave). For example, to spray grapes in a vineyard, an autonomous system needs to know not only its exact position but also whether it is level or tilted to one side due to uneven terrain, lest it spray the ground or into the air instead of the grapes. Similarly, a survey vessel’s pitch, which depends on its speed through the water, and its roll, due to waves and wind, affect the direction of its sonar beams.
Knowing a platform’s position, heading and attitude requires tight integration of the outputs of GNSS receivers and inertial navigation systems (INS). This enables autonomous systems to compensate for their movements — either physically and in real time, by orienting their sensors or tools, or in software when post-processing the data they collected.
The following three case studies sample current developments in autonomous systems on land, in the air, and on the water.
L’avion jaune, a French UAV and aerial photogrammetry company, uses the Trimble Applanix APX-20 UAV GNSS-inertial OEM solution and a YellowScan VX-20 lidar on its M600 multirotor UAV. (Image: L’Avion Jaune)
The breakdown of limestone cliffs generates landslides and loose debris that threatens the environment, people and wildlife below. These conditions make it impossible to safely operate traditional survey equipment from the ground for landslide detection. Using UAVs for direct georeferencing is an efficient way to take traditional survey efforts to the sky and enables users to accurately assess land formations while mitigating risk.
One way to implement direct georeferencing on UAV platforms is with the Trimble APX-20 UAV, which is a GNSS-inertial OEM solution that increases the mapping efficiency of small UAVs. It consists of small, low power, precision GNSS and inertial hardware components and POSPac UAV post-mission differential GNSS-inertial office software. The APX-20 UAV eliminates the need for ground control points and reduces the sidelap required to be flown per flight.
The APX-20 UAV contains a precision, survey-grade GNSS receiver and dual inertial measurement units (IMU), so it automatically supports integration on gimballed platforms without requiring an external interface to an autopilot or on a mount. It computes at 100 hz using the embedded IMU while simultaneously logging the raw IMU data from both the internal and external IMU at 200 hz for post-processing in POSPac UAV. The postprocessed position and orientation solutions are suitable for direct georeferencing of cameras, lidars and other sensors.
Trimble Applanix UAV Put to the Test
For fast and safe landslide detection, the Trimble Applanix APX-20 UAV for direct georeferencing was put to the test using a Multirotor M600 manufactured by French company L’Avion Jaune equipped with a VX-20 lidar sensor made by YellowScan, also a French company. This combination produces cost-effective and reliable high-resolution UAV lidar-derived DTMs and 3D models for hazard mitigation and planning.
L’Avion Jaune has performed more than 600 successful mapping missions globally. After pursuing mapping activities with mainly crewed aircraft, it began developing UAVs for long-distance applications for marine, tropical forest and polar regions such as the Multirotor M600/YellowScan VX-20, which offers high-precision, cost-effective and efficient aerial mapping.
The APX-20 UAV and the M600/YellowScan VX-20 were combined and deployed to evaluate landslide activities in France. The mission parameters for this configuration included: high point density; x, y, z precision of 5 cm; access to dangerous zones; map generation under dense vegetation area, and fast deployment. The goal of this project was to enable the implementation of safety and prevention plans for the protection of pedestrians, infrastructure, wildlife and more.
During the six-hour duration of the project, the APX-20 UAV and M600/YellowScan VX-20 configuration was flown four times for 15 minutes each during sunrise. It flew more than 75 ha in surface area with a flight speed of 5 m/s at 60 m in the air, following the topography. Checkpoints were surveyed with differential GPS following the conclusion of the flights. Data processing included computation of the georeferenced trajectory, matching flight lines and point cloud classification, which took two days.
The Results
The flexible UAV deployment of resources enabled the acquisition of dense point clouds and the generation of DTM in less than three days. During this project L’Avion Jaune was able to optimize the choice of material and discover the best practices to collect and process lidar data for mapping in dense vegetation.
To improve the efficiency of their hydrographic surveying services and expand them, Coastal Geomatics evaluated multiple USV, choosing the CHC Apache 4. (Image: Coastal Geomatics)
Time (and costs) saved using unmanned surface vessels (USV) over conventional methods for hydrography can be dramatic — especially in autonomous mode. Numerous firms, large and small, have discovered how modest investments in such craft can completely revolutionize their hydrographic operations. One such firm is the family owned and operated Coastal Geomatics in North Carolina.
“With conventional methods, it used to take us four weeks with a three- or four-person crew to do the bathymetry for 26 canals that we do every two years for the City of Holden Beach,” Chris Stanley, owner and manager of Coastal Geomatics, said. “Now, with our Apache we do this over four days of high tide; about four to five hours per day.”
Stanley had been surveying in the local area for more than 30 years and had partnered in several local firms. In 2020, he decided to start his own firm, together with his two adult sons Alan and Ian: Coastal Geomatics was born.
“We do a lot of boundary work, and topographic surveys as there is a lot of construction going on in the area,” Alan said. “We also do flood insurance work, FEMA elevation certificates, and hydrographic work — we are on the coast.” Holden Beach is on one of North Carolina’s barrier islands, separated from the mainland by the Intercoastal Waterway. Coastal Geomatics has standing contracts to do hydro work for FEMA beach erosion annually, and the biennial canal surveys for the city.
The move to a USV for hydrographic surveys made a lot of sense, however a past bad experience with the technology prompted Stanley to be extra diligent in choosing a boat. At one firm for which the elder Stanley had worked in the past, they had acquired a USV that he said was essentially “a jet ski, with a mix of components cobbled together.” He added that they had never really gotten it to work right, and it now sits idle in a storage unit.
The Stanleys did some research on the current state of small USV, noting that some still seem like “contraptions” and decided instead to test out three models from CHC Navigation: the Apache 3, 4, and 6. They had considered the tri-hulled Apache 6 for some offshore work they sometimes do, however, they chose the Apache 4 for now. It has a dual GNSS antennas for position and heading that is tightly coupled with an IMU for uninterrupted positions, a single beam echo sounder, and a 360° camera. It has a sensor well that can accommodate most of the popular models of acoustic doppler current profilers (ADCP), though Coastal Geomatics is not presently using an ADCP. It can be run fully autonomously for missions defined in the AutoPlanner software, or remotely piloted — Coastal Geomatics needed both options. They noted how the boat is compact, easy to operate, and all components are well integrated with watertight seals.
For open water areas of their contracted surveys, they put the USV in full autonomous mode, where they say it is quite efficient. However, there are specific tasks where a remote pilot needs to take over.
The canals surveyed for the city to inform dredging operations are about 100 feet wide and each house has a floating dock. There is a 20- to 30-foot strip between the docks. The old method, Ian explained, was to put one of the crew in a small flat bottomed Jon boat, with a crew member on each side of the canal, often with a fourth using a total station. Points across the canal from bulkhead to bulkhead were taken with a long prism pole, handing the pole off to the crew member on the other side after each crossing. The dynamics of which residents’ boats might be at the docks on any given day made full autonomy for that phase of the surveys impractical.
Coastal Geomatics’ solution was to employ a peddle-powered kayak, guiding the Apache remotely. The flexibility of their new craft has enabled the firm to execute multiple types of surveys and expand their hydrographic services more efficiently.
CNH Industrial has entered an agreement to acquire Hemisphere GNSS, a manufacturer of high-performance satellite positioning technology owned by Unistrong. The $175 million acquisition aims to advance automated and autonomous solutions from CNH Industrial for agriculture and construction applications.
Hemisphere GNSS technology will be integrated into CNH Industrial’s products and services providing users with suitable solutions in the field and on job sites.
Hemisphere GNSS’ core technology capabilities include application-specific integrated circuit chips, circuit boards, radio frequency signal processing, navigation algorithms, and satellite-based correction designs. The company’s proprietary GNSS solutions provide accuracy for the agriculture, constructions, mining and marine industries.
The Resilient Missile Warning, Missile Tracking, and Missile Defense Acquisition Delta of the U.S. Space Force’s Space Systems Command (SSC) has released a request for information (RFI) seeking industry inputs for the next Epoch of medium-Earth-orbit missile warning and tracking (MW/MT) satellites. Responses from industry are requested by no later than May 16.
A continuation of the Missile Track Custody (MTC) Program, Epoch 2 is the second increment of capability-based, phased deliveries that leverage a mature foundation of space system technology — which allows for the insertion of new technology. Resilient MW/MT Epoch 2 satellites and associated ground systems will provide next-generation overhead persistent infrared solutions to defeat advanced missile threats.
The RFI solicits feedback from industry on the Epoch 2 acquisition strategy and technical approach for a multi-plane space segment, integrated ground segment and constellation-level systems operations.
Epoch 2 will emphasize the maturation of MW/MT sensors, optical cross-links, data fusion, constellation mission management and robust ground communications.
For more information on receiving the full Epoch 2 RFI can be found on the SAM.gov website linked here.
Bluesky International and SkyFi have collaborated to provide access to Earth observation assets and multi-perspective imagery to users globally. Bluesky is providing its high-resolution aerial imagery, taken by aircraft-mounted cameras, to SkyFi to make available for businesses, forestry, water and land managers across the United Kingdom.
SkyFi aims to make Earth observation data more accessible to users through its growing network of satellites and aerial platforms. The company has created a data marketplace where users can purchase existing images or task a satellite to purchase a new image.
Bluesky provides a wide range of geospatial data products and services to users across the United Kingdom. GIS and CAD-ready imagery from Bluesky captures ground terrain, cityscape rooftops, fauna and more. The company’s catalogue of aerial imagery is available in England, Scotland, Wales and the Republic of Ireland.
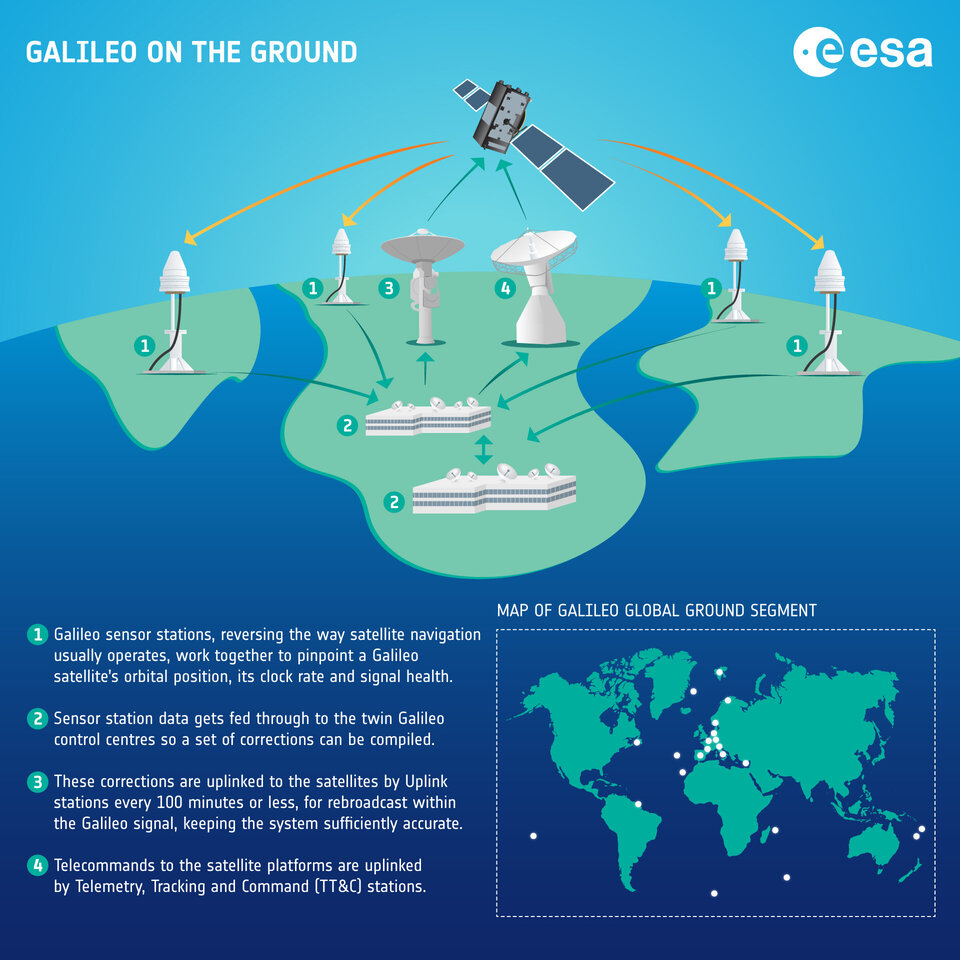
The European Space Agency (ESA) Academy is requesting university students to apply for the pilot edition of the Navigation Training Course. The course will take place June 26-30 at ESA Academy’s Training and Learning Facility in ESEC-Galaxia, Belgium.
With a specific focus on Galileo, the ESA Academy course aims to provide university students with an introduction to satellite navigation. Designed by ESA experts that developed the Galileo space and ground segment, this training course will offer students fundamental knowledge of Galileo’s architecture, tools, services and functionalities.
The training course will include lectures and hands-on exercises with a tour of Galileo in-orbit test facilities in ESEC, which provides an essential part of the current Galileo ground segment.
Upon completion of the training course, students will be evaluated and will receive a certificate of participation and course transcript, allowing them to request ECTS credits from their respective universities.
For more information and application requirements, visit the ESA website.
Atmos — a Dutch UAV manufacturer that develops vertical take-off and landing (VTOL) fixed-wing UAVs for mapping and surveying applications — expanded its global reseller network by signing an agreement with Topcon Solutions. Topcon will be responsible for the distribution of Marlyn Cobalt UAVs in the United States and will provide assistance and maintenance services to local UAV operators.
The Marlyn Cobalt is a VTOL fixed-wing mapping UAV developed by Atmos and enables users to collect accurate geospatial information and turn it into actionable insights.
Atmos has integrated the Sony a7R mark III and IV cameras into the Marlyn Cobalt to increase the coverage and accuracy achieved in a single flight for surveyors. When combined with Zeiss’ 35 mm and 21 mm lenses, UAV surveyors can achieve ground sample distance levels of less than 1 cm. The integration of the two cameras enables Marlyn Cobalt users to map an area of 210 ha with centimeter-level accuracy in a single flight.
On March 20, 2023, I wrote a short announcement about a funding opportunity by the National Geodetic Survey (NGS) to support the science of geodesy.
As mentioned in previous columns, Everett Hinkley wrote about the geodesy crisis in an ION article. Hinkley’s article summarized several action items that could help improve the lack of trained geodesists in the United States. One action was to encourage U.S. government support in the form of grants, professional development of staff, and research collaborations/affiliations. A pilot PhD geodesy educational program with three National Geospatial-Intelligence Agency (NGA) and one NGS employee is in place. He stated that the NGA expects to continue growing this program. Click here for more information on NGA’s academic research program.
NGS’ geospatial modeling grant is another example of this action item. There needs to be more funds added to this task, but it is a start. The program priorities under NGS’ grant program include: research and develop new methodologies for defining and applications for working with the NSRS; develop and evaluate tools, models, and guidelines to access, analyze, and manipulate geodetic data; enhance infrastructure of geodetic control, coastal remote sensing data, survey measurements, and other physical datasets that comprise the NSRS; support education, capacity building, and technology transfer for the future of geodesy; coordinate through partnerships with local, state, and regional users such as state and local governments, universities, and/or the public sector.
The geospatial modeling grant was included in the 2023 Omnibus Appropriations Bill. The agreement provides $8,000,000 for the program and states that all funding shall be distributed externally. Hopefully, the same amount or more will be in FY 24 appropriations. Additional information about NOAA’s appropriations can be found in the 2023 Omnibus Appropriation Bill under the explanatory statement for Commerce, Justice, Science and related agencies. The bill can be found here. To find the language in the bill click here, then search the document for “geospatial.” See the image below for the language in the bill.
Image: Senate.gov website
For those that are interested in the appropriation process, the image below provides a list of the senators that work on these agencies’ appropriations. If you are interested in learning more about the appropriation process and the geospatial modeling grants, contact your senator. The more congressional representatives know about the geodesy crisis — which includes the lack of trained geodesist as well as surveyors — the sooner they will support funds to help correct the problem. Click here for a list of senators on the Commerce, Justice, Science and Related Agencies Appropriation Committee.
Advancing geodesy with conferences
Another activity that promotes the advancement of geodesy and surveying are national and international surveying and mapping conferences. Before the American Congress on Surveying and Mapping (ACSM) disbanded, the four-member organization collaborated to convene annual surveying and mapping conferences in the United States. Topics like those presented at a FIG Working Week were presented at these conferences.
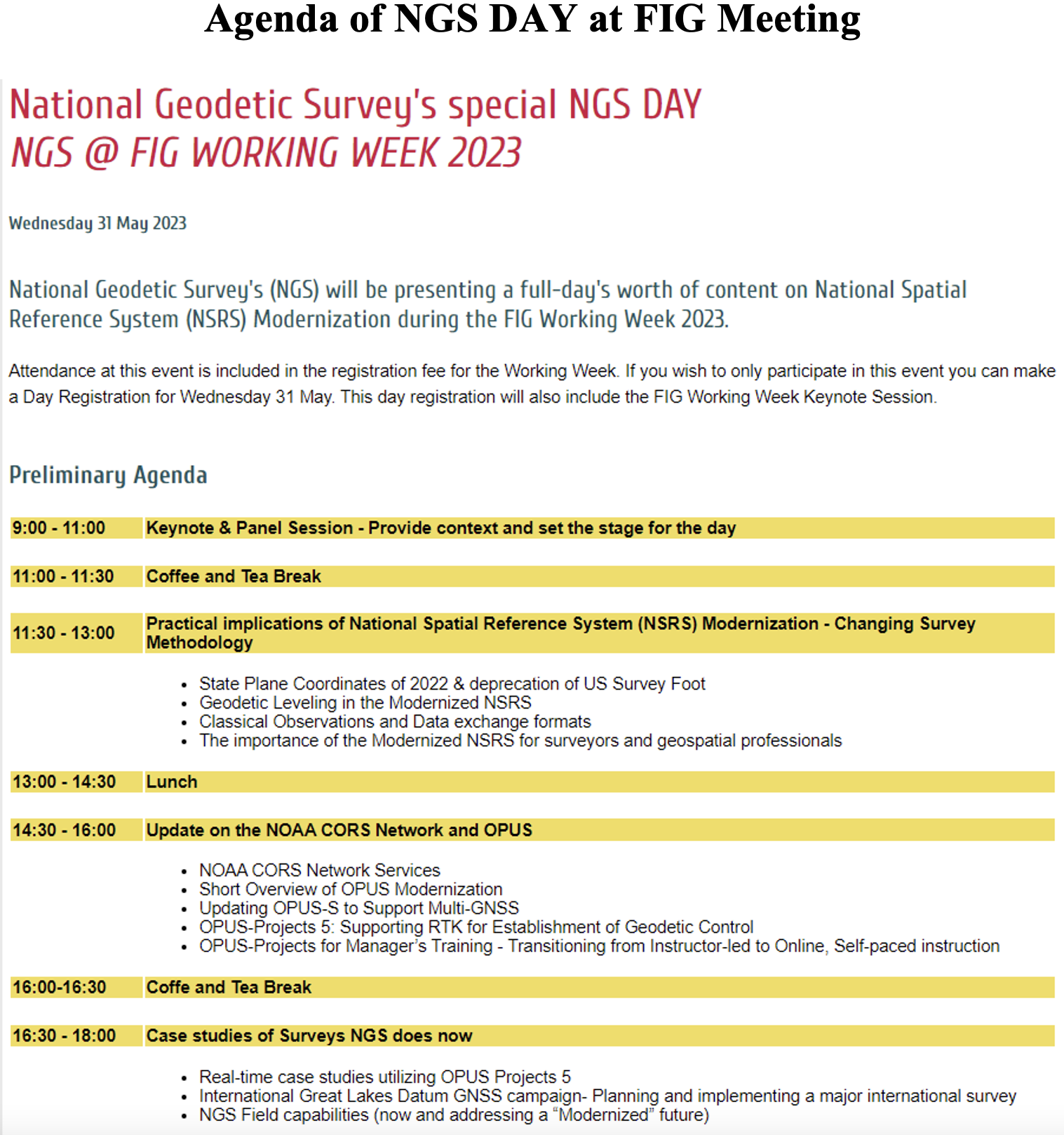
Since these ACSM conferences are no longer being held, I encourage users of geospatial data and GNSS technology to attend conferences like FIG Working Week 2023. I have participated in several FIG meetings and learned a lot from presentations as well as holding hallway meetings with experts from the international surveying and mapping community. In the March column, I highlighted that FIG Working Week 2023 is going to be held in Orlando, Florida, on May 28 – June 1. NGS will be presenting a full-day worth of content on NSRS modernization during the conference. I want to highlight some presentations that may be of interest to readers. Register for FIG Working Week 2023 here.
The image below provides a list of NGS presentations with scheduled times. There will be a panel session in the beginning of the day to set the context for the day.
Agenda of NGS DAY at FIG Meeting (Image: FIG website)
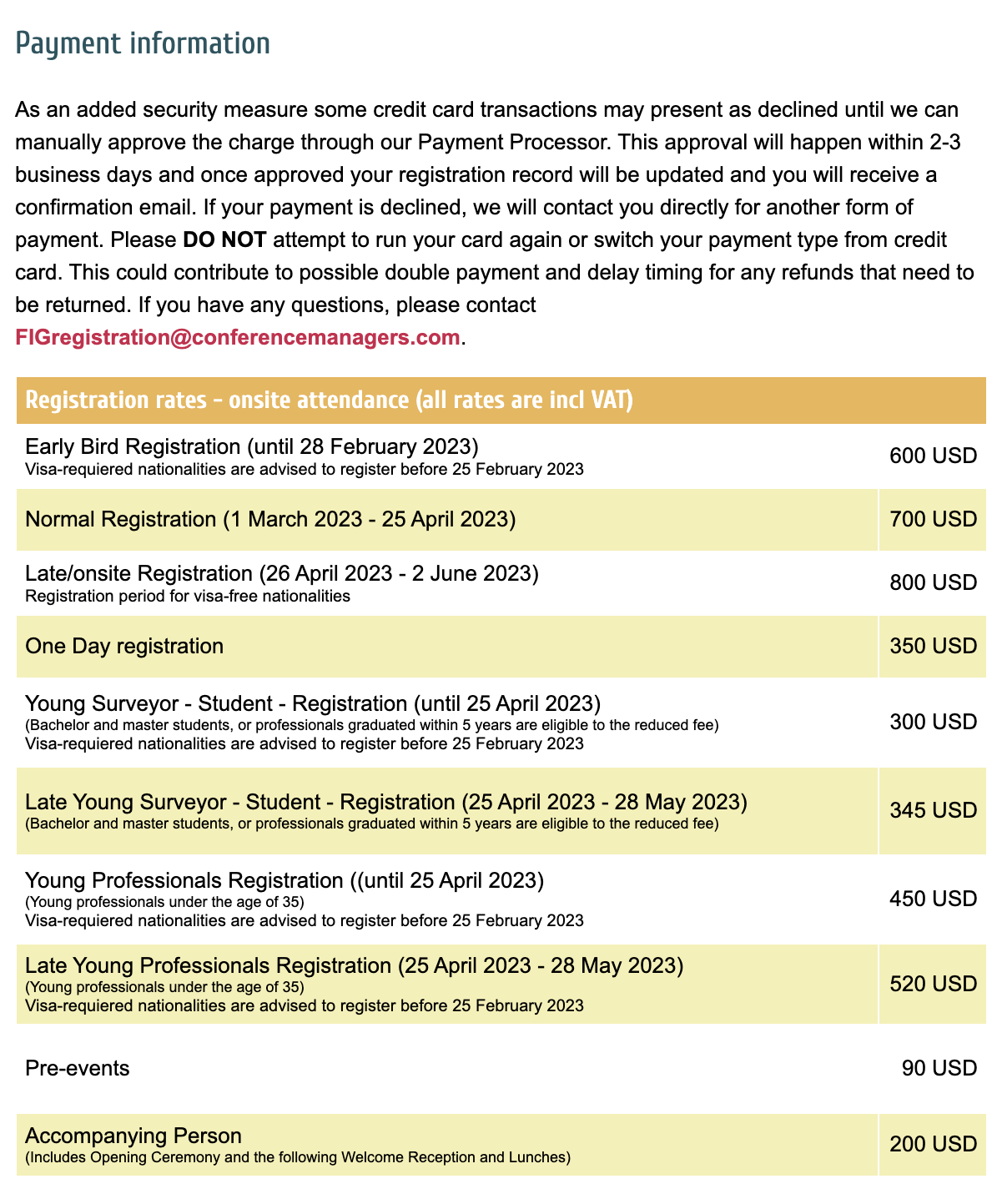
As in most conferences there are several ways participants can register, one day to the entire conference. This is a great opportunity to have discussions with the leadership of the National Geodetic Survey and individuals working on the development of the new, modernized NSRS.
Image: FIG website
There are a lot of presentations on various topics so, I would encourage readers to look through the entire agenda. FIG’s technical work is led by ten commissions. The August 2021 column provided information about the FIG commissions. See the list of commission below:
Commission 1 – Professional Standards and Practice Commission 2 – Professional Education Commission 3 – Spatial Information Management Commission 4 – Hydrography Commission 5 – Positioning and Measurement Commission 6 – Engineering Surveys Commission 7 – Cadastre and Land Management Commission 8 – Spatial Planning and Development Commission 9 – Valuation and the Management of Real Estate Commission 10 – Construction Economics and Management
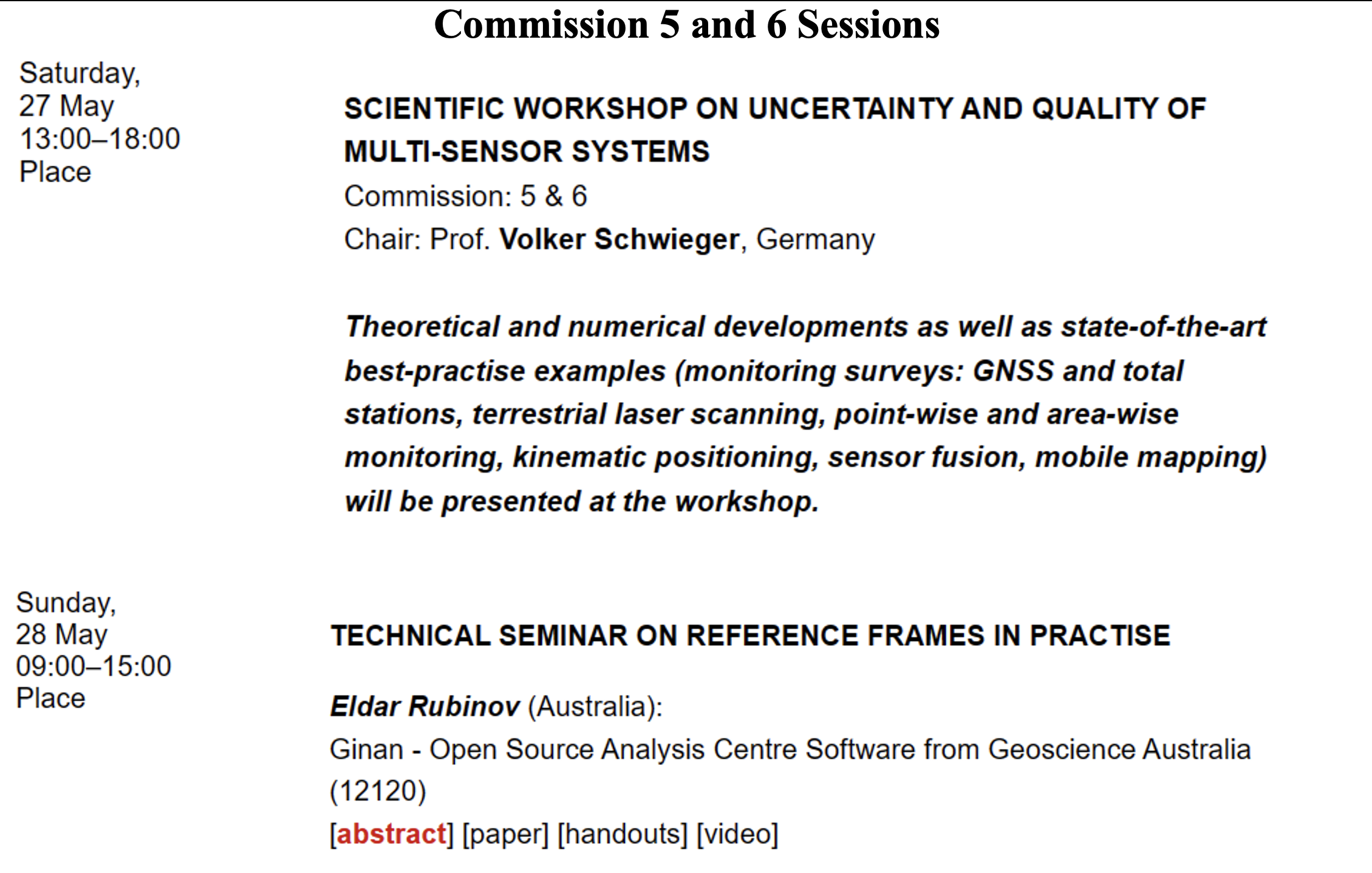
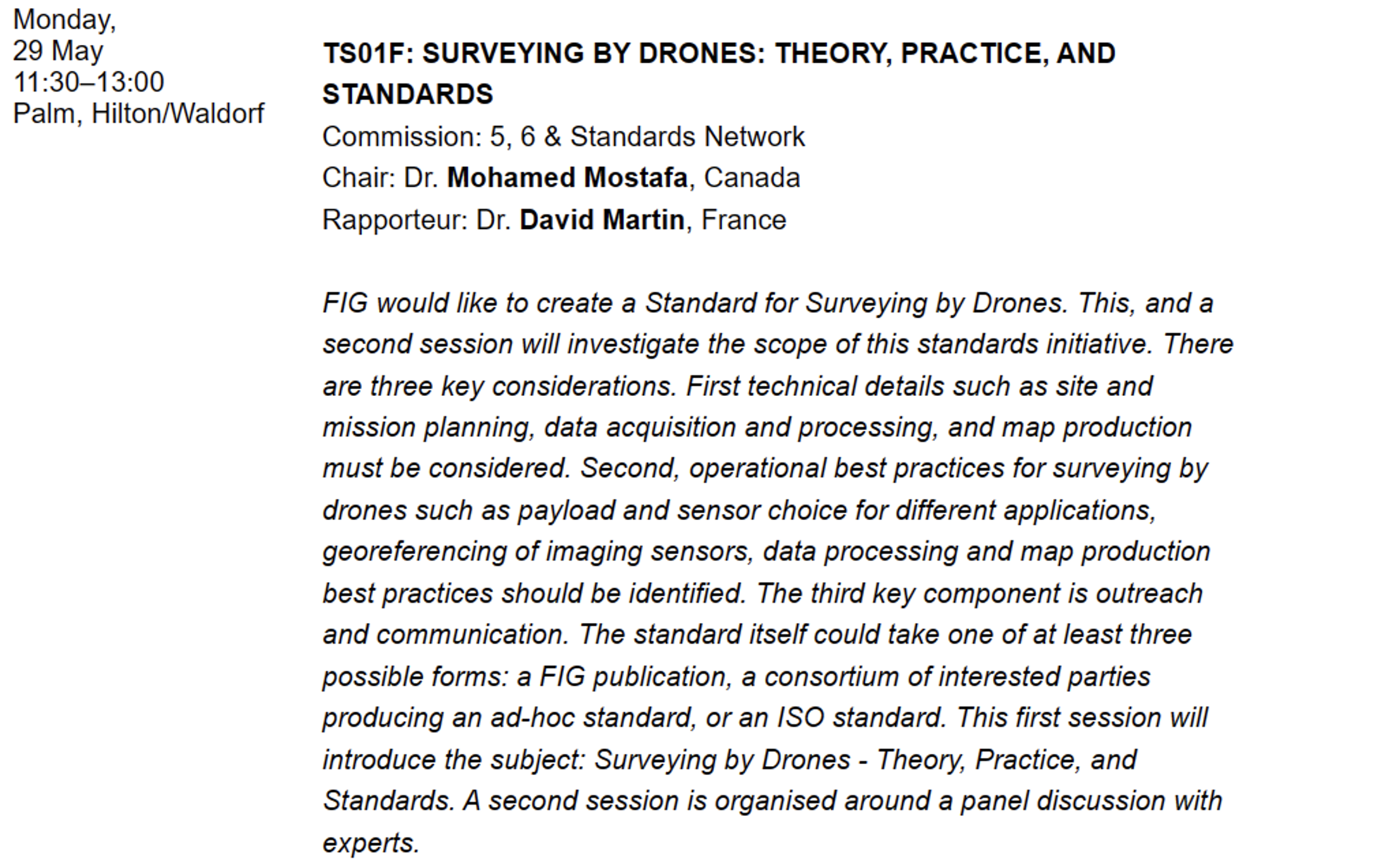
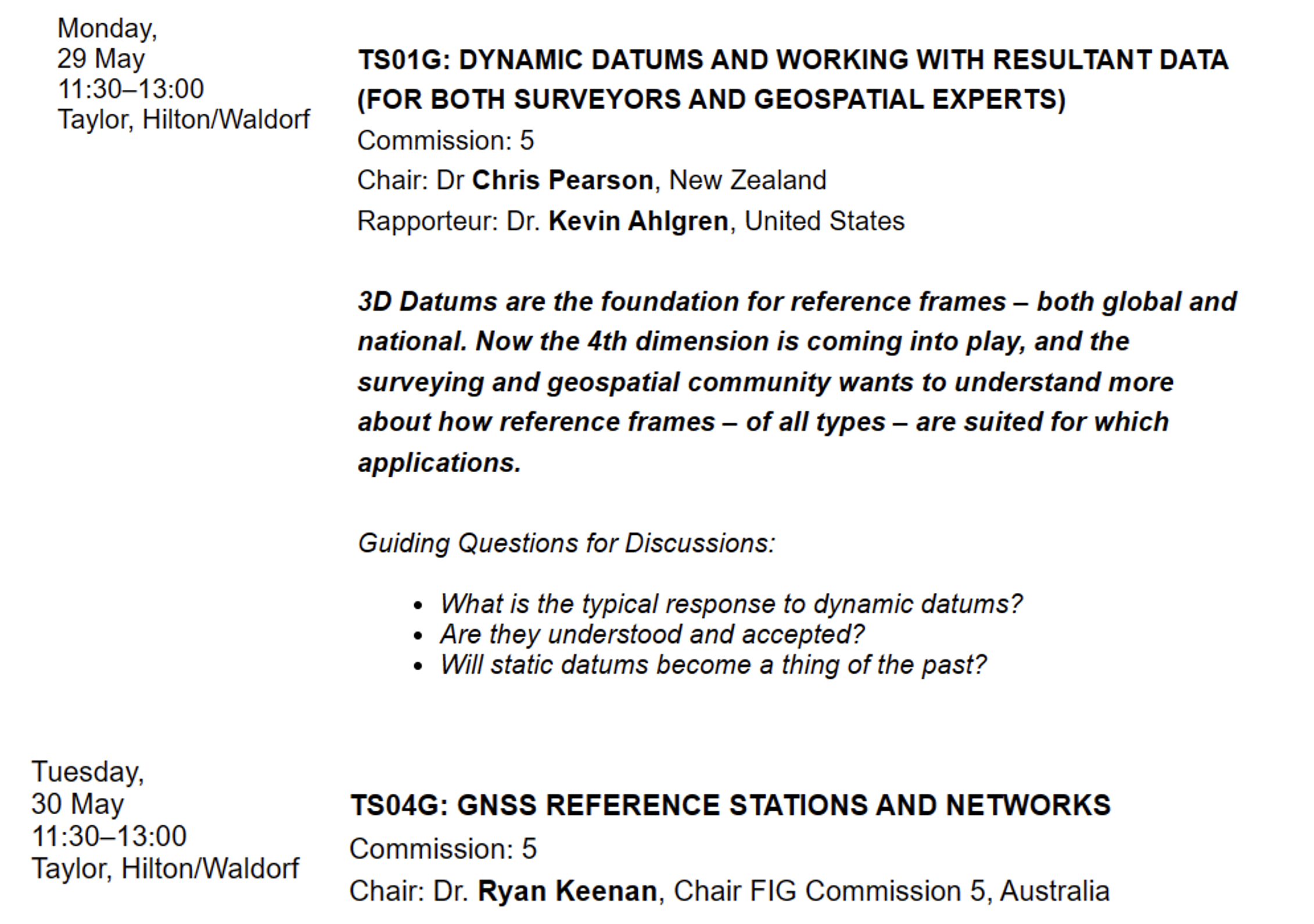
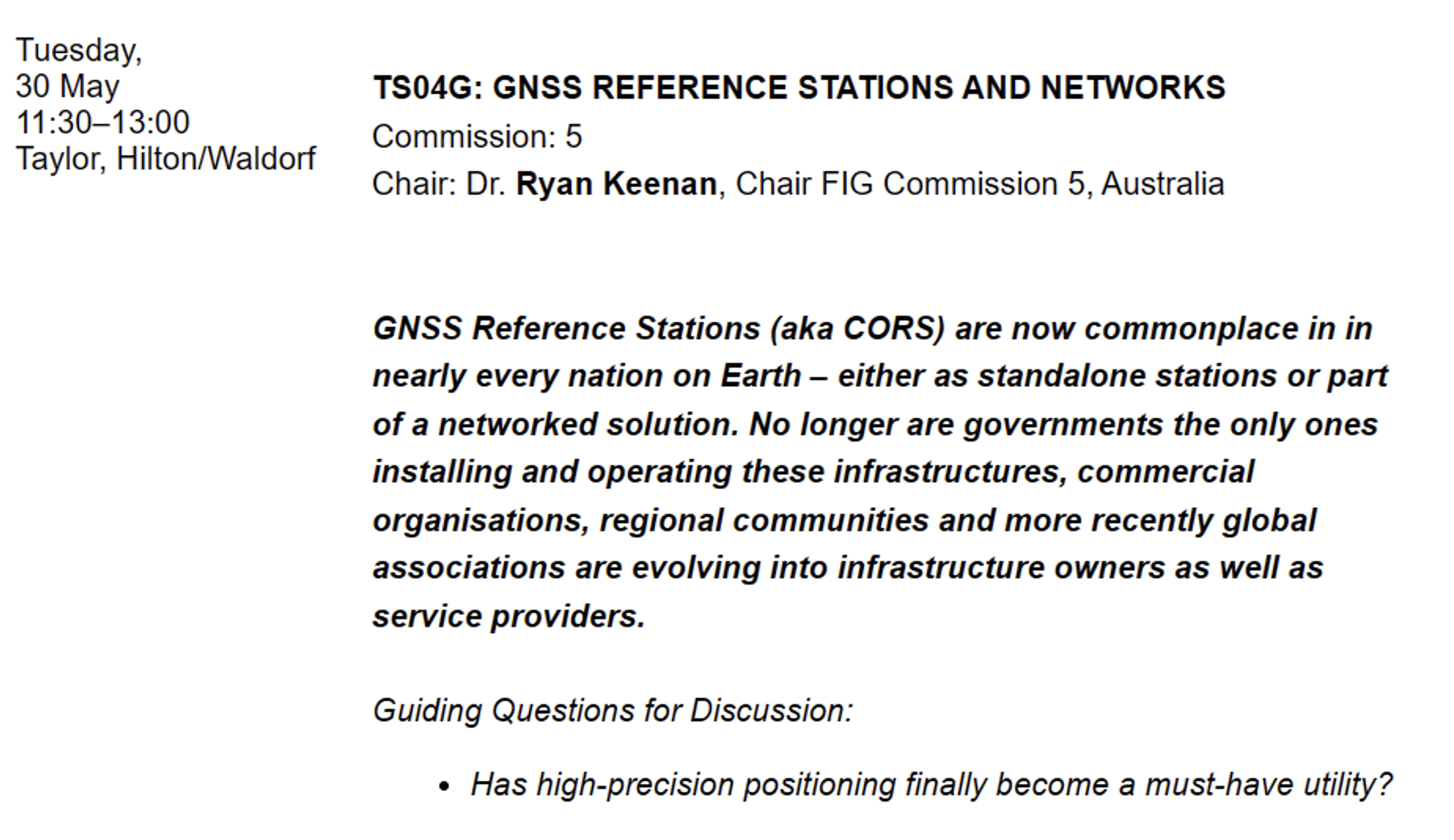
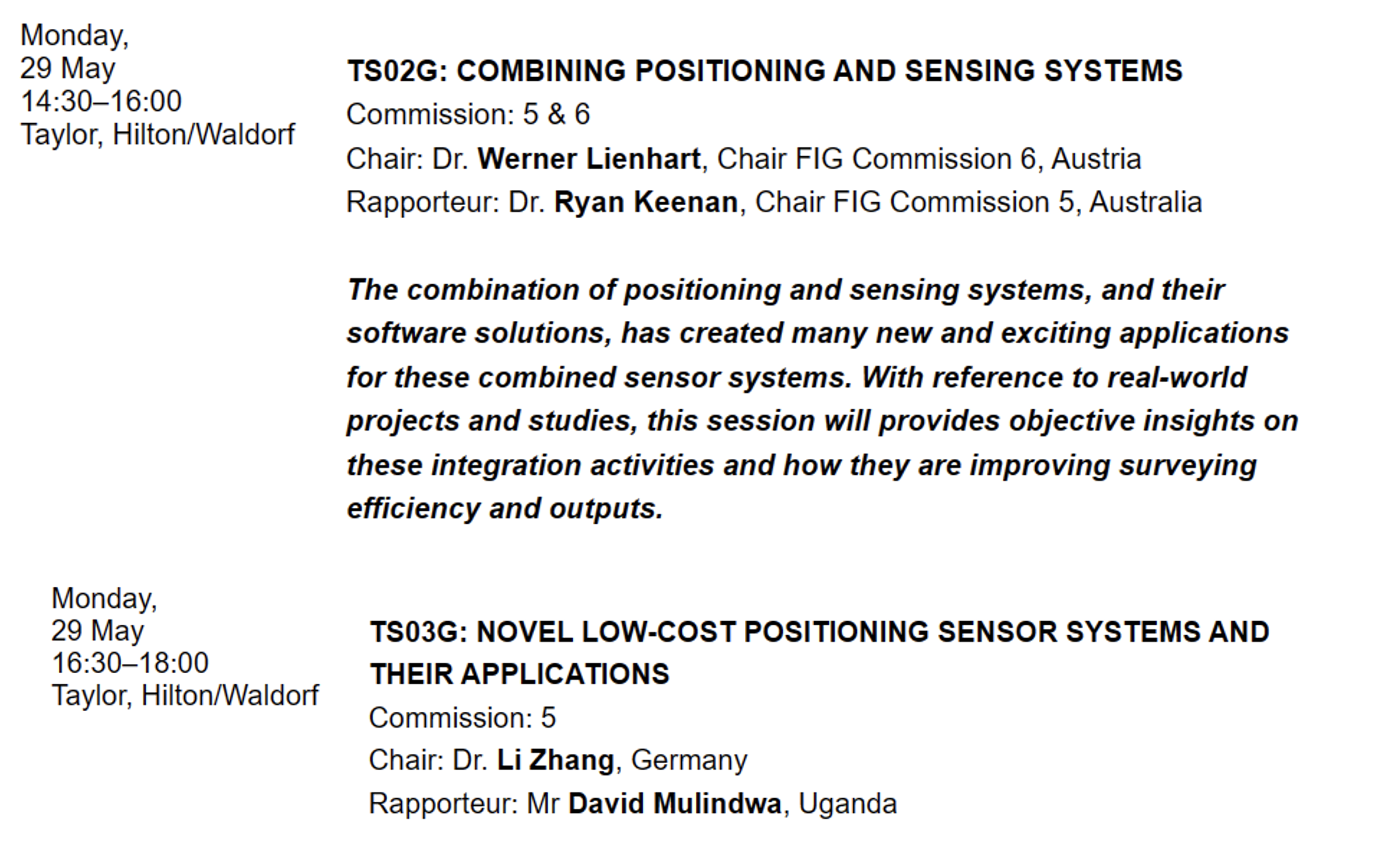
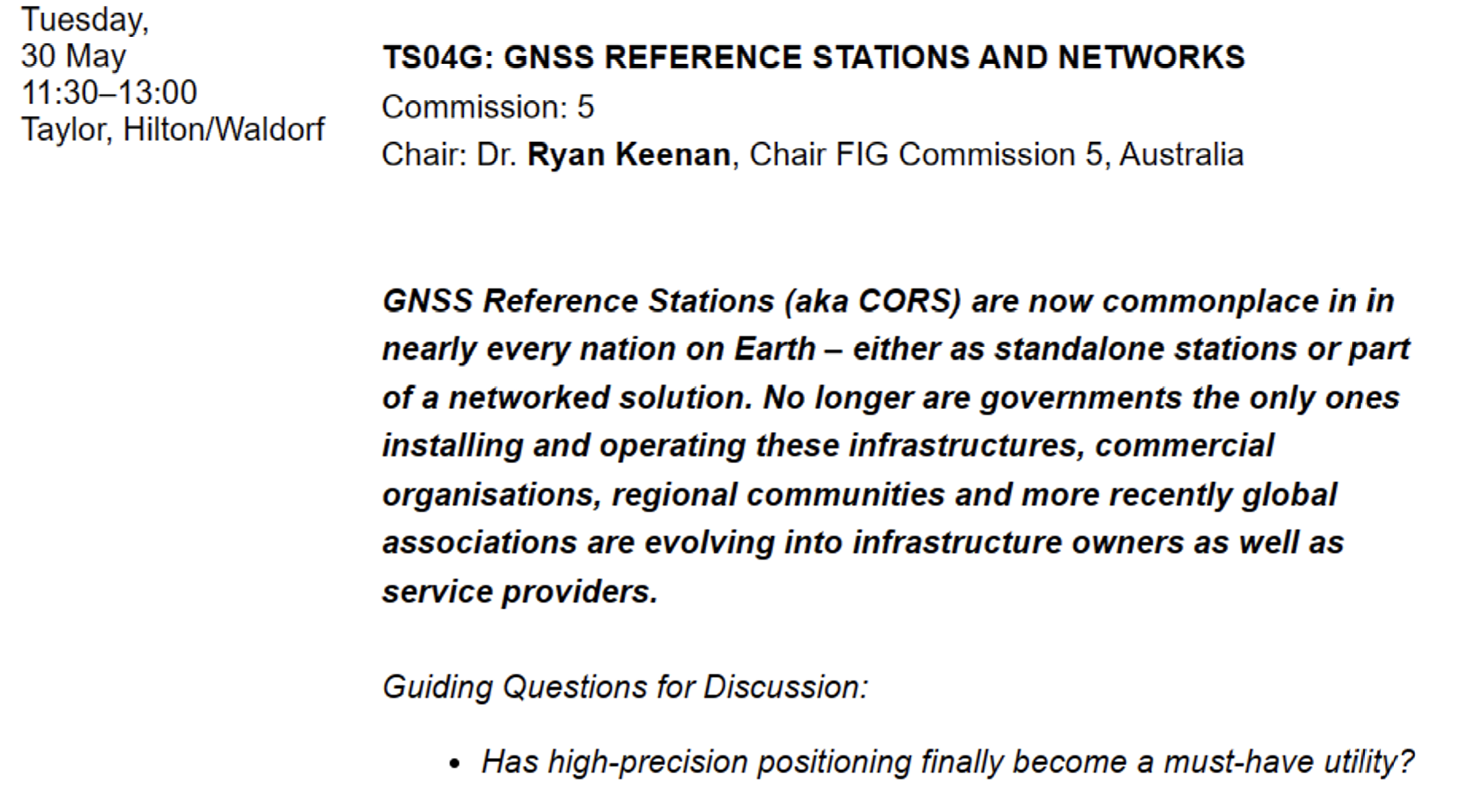
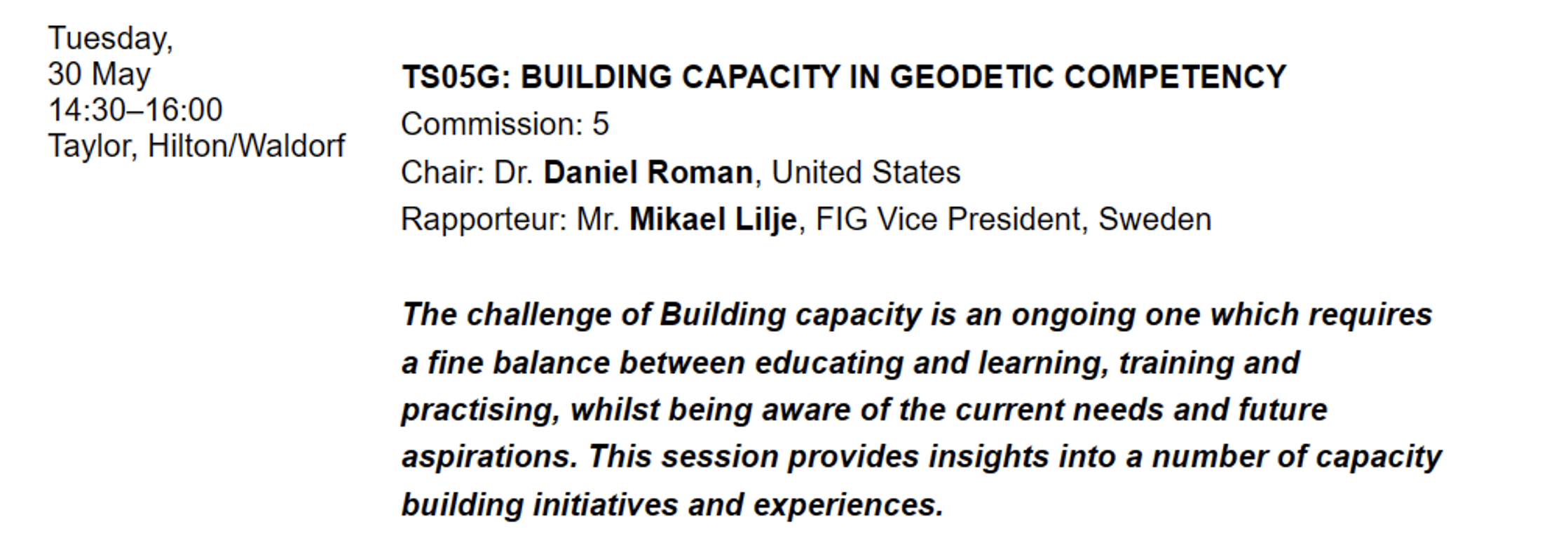
The full technical program lists the topics by date and time. I highlighted sessions by commission 5 and 6 that I think would be interested to the surveying and mapping community. See the image below.
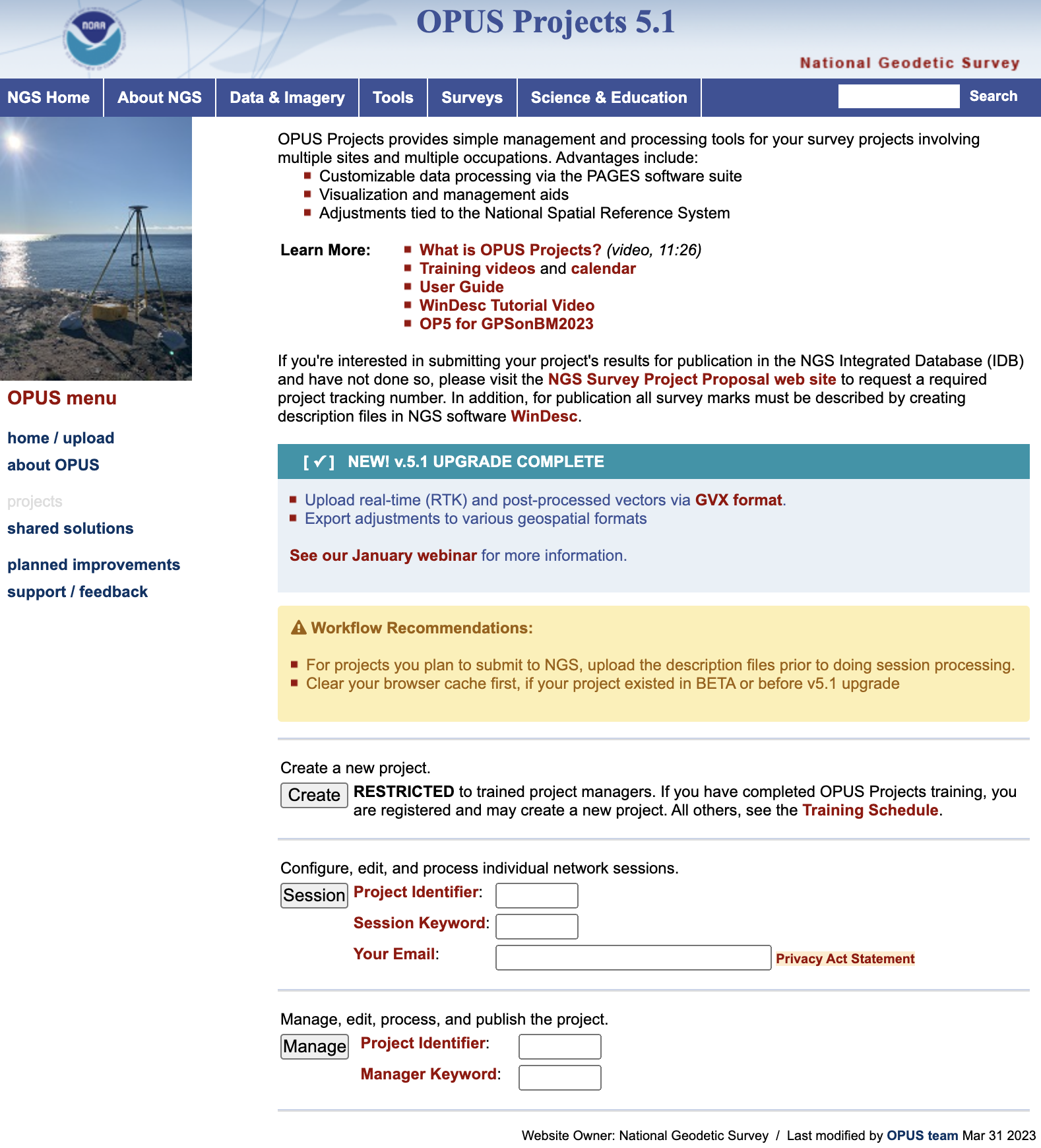
Finally, I would like to highlight a NGS product that is now in production mode. That is, OPUS Project 5.1 is now a production product. *NGS did not make an official announcement about this change, but if you access OPUS Project the new version comes up. As described in the March column, OPUS Project 5.1 routine allows the use of RTN vectors and post-processed vectors from vender software.
Clicking the “projects” icon on the OPUS page connects you to the latest version of OPUS Project 5.1. See image below. Please see the March column or NGS’ January webinar to learn more about OPUS Project 5.1.
Image: NGS Website
*Note: As of the writing of this column, March 29, it is still listed on the beta release section of NGS website. If you click on OPUS Project 5.1 in the Beta Release section, it will link to the production version of the routine.