A new edition of the European Union’s Space Market Report is now available. According to the EU’s Agency for the Space Programme (EUSPA), it offers a comprehensive overview of the latest developments, emerging trends, and market dynamics shaping the global space downstream sector.
The report provides a comprehensive overview of the latest developments and trends in GNSS, as well as Earth observation (EO), secure satellite communications (Secure SATCOM), and space situational awareness (SSA) in one place for the first time. It also highlights the evolution of user technologies and the growing synergies between these domains.
“As Europe’s space capabilities become increasingly interconnected, it is essential to move beyond viewing them as standalone technologies,” explained Rodrigo da Costa, EUSPA executive director. The publication “reflects the growing synergies between these domains and their strategic importance for Europe’s economy, resilience and autonomy.
“By providing a comprehensive view of the evolving space ecosystem, EUSPA aims to foster innovation, strengthen collaboration across the sector, and support the development of a more competitive, agile and responsive European Union space economy,” da Costa said.
GNSS and EO
The report highlights sustained growth for both the GNSS and EO markets across all 16 analyzed market segments. The current €3.5 billion of EO market revenue in 2024 is expected to grow to €7.9 billion by 2034 with agriculture representing the largest share.
GNSS revenues are forecast to rise from €300 billion in 2024 to €580 billion by 2034. GNSS service revenues outpace device revenues and confirm the increasing role of digital ecosystems and value-added services in the space economy, the report said.
Revenues are mainly driven by consumer solutions, and road and automotive, with a global installed base of GNSS-enabled devices that will reach almost 10 billion by 2034.
Secure SATCOM
The Secure SATCOM market addresses the needs of surveillance, key infrastructure and crisis management. In this sector, data service revenues generated by EU users are forecast to grow significantly, increasing from more than €200 million in 2025 to nearly €1.2 billion by 2040.
While maritime surveillance drives demand in 2025, by 2040 the market is expected to be led by law enforcement interventions, civil protection and force deployment, fueled by growing security and resilience needs, demand for reliable connectivity, and stronger crisis-response capabilities.
Existing and future synergies
The report also examines how major macroeconomic trends —including climate change, geopolitical instability and rapid urbanization — are reshaping space markets and strengthening synergies between EO, GNSS and Secure SATCOM technologies. Together, these capabilities are becoming increasingly important for security, resilience, disaster response, environmental monitoring, and smarter urban and infrastructure management.
TrustPoint has been awarded a $4 million Tactical Funding Increase (TACFI) contract to demonstrate a GPS-independent positioning, navigation and timing (PNT) system.
The award was issued by SpaceWERX, the innovation arm of the United States Space Force, and jointly funded by the Small Business Innovation Research (SBIR) program and the Commercial Space Office (COMSO). It supports a full end-to-end demonstration of TrustPoint’s resilient navigation architecture designed for defense and commercial applications.
Under the contract, TrustPoint will design, deploy and operate a fully integrated PNT system comprising four satellites and four ground stations, delivering a complete operational architecture. The program will execute an end-to-end system demonstration, including live trilateration across multiple space and ground assets, operational services and advanced receivers.
With an accelerated execution timeline, initial system deployments will occur within 12 months, establishing a rapid deployment model designed to scale to significantly larger constellations while prioritizing affordability, operational relevance, and capital efficiency.
“We founded TrustPoint on the belief that resilient navigation does not require billion-dollar constellations,” said Patrick Shannon, founder and CEO of TrustPoint. “This program will prove our technology’s GPS independence while demonstrating that real, operational PNT capability can be delivered with exceptional capital efficiency.”
Beyond GPS-independent C-band demonstrations, the system will validate a software-defined architecture that supports on-demand reconfiguration of navigation services in contested, degraded and denied environments, pioneering commercial delivery of this capability. TrustPoint’s experience includes the first C-band GNSS signal transmission with real-time reception and the first broadcast-based ground-to-space C-band PNT demonstration.
The program directly advances national security objectives. It also establishes a scalable foundation for future commercial services, redefining what is possible for users who require reliable PNT in GPS-challenged environments.
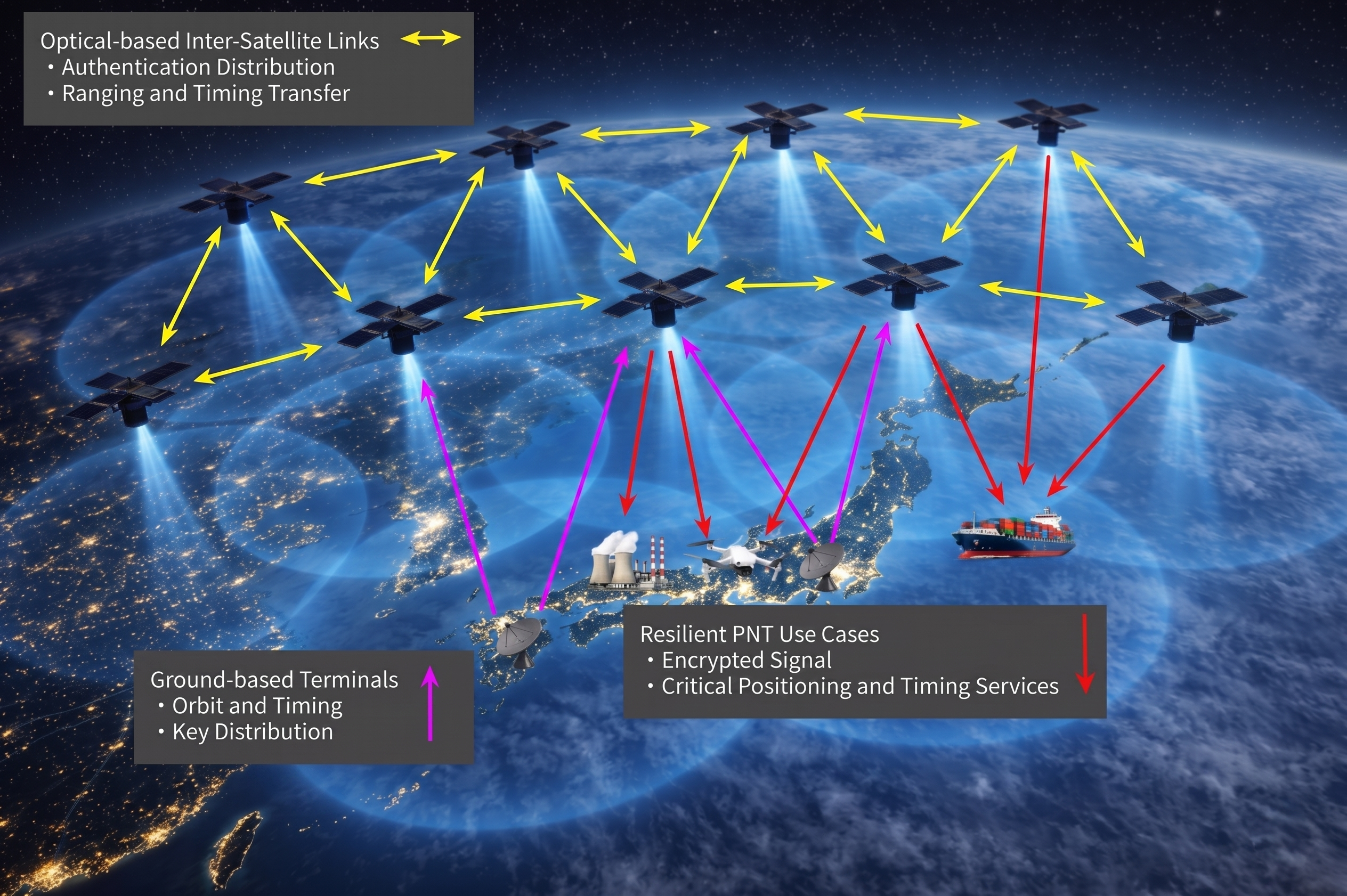
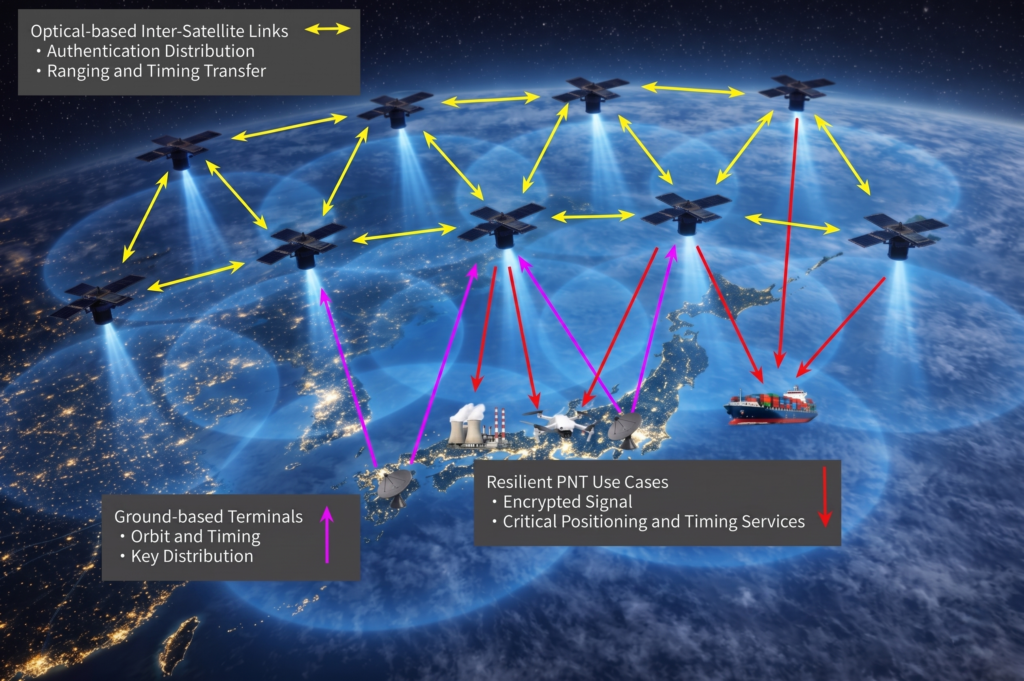
ArkEdge Space Inc. has completed a study commissioned by the Japan Aerospace Exploration Agency (JAXA) on “Elemental Technologies and Systems for a Dedicated, GNSS-Independent LEO-PNT Satellite System.”
Positioning, navigation and timing derived from GNSS is increasingly subject to interruption and interference, both through environmental and security challenges. Finding methods to protect PNT information against such interference is of paramount importance for governments and commercial actors alike.
The ArkEdge/JAXA project addressed such challenges by examining and categorizing the necessary elemental technologies — signal design, receiver technology, ground infrastructure, satellite sensors, and the overall system architecture — required to realize a LEO-PNT system capable of providing PNT without reliance on traditional GNSS.
The study’s focus included achieving satellite orbit determination and time synchronization without GNSS, one of the key challenges facing alternative PNT providers. It explored a new architecture for onboard time determination that avoids the need for large atomic clocks. Instead of onboard clocks, the system transmits precise timing information from combinations of ground-based reference clocks, pseudolites and inter-satellite optical links to disseminate information and enable on-orbit ODTS.
Concept art of the LEO-PNT satellite constellation. (Credit: ArkEdge Space)
The study considered diverse frequencies to strengthen anti-jamming measures. It also looked at novel signal design, receivers, encryption and signal authentication methods, and their suitability for LEO-PNT satellites. Results of the study will contribute to the next stage of development for a GNSS-independent LEO-PNT concept.
“This study is critical to advancing our understanding of Japan’s future relationship with PNT,” said ArkEdge Space Chief Strategy Officer Tomoaki Yasuda. “Across the world, users are facing denial of GNSS services, and that can have critical consequences for sectors including the economy, transport and emergency services, among others. We look forward to progressing the GNSS-independent LEO-PNT concept with the support of our partners.”
“Due to the prevalence of GNSS interference, alternative PNT systems are becoming increasingly important to protect users and assets such as critical national infrastructure,” said Masaya Murata, JAXA. “Following the successful conclusion of this GNSS-independent LEO-PNT study with ArkEdge Space, our investigation into a robust and resilient LEO-PNT system continues. We are also emphasizing international cooperation with other LEO-PNT providers to maximize users’ PNT experience and continue to engage in collaborative discussions.”
China’s BeiDou navigation industry in 2025 achieved a total output value of 1.33 trillion yuan (US$195 billion), according to a report released Monday by the GNSS and Location Based Services (LBS) Association of China, or GLAC, reports CGTN.
The BeiDou industry includes remote sensing and geographic information systems (GIS), mobile communications and indoor positioning. The satellite navigation sector generated 629 billion yuan (US$92 billion) in 2025, up 9.24% year on year, according to the report.
China has established a complete BeiDou industrial chain and supply chain, covering chips, modules, antennas, terminals, system integration and application services, , according to the report. Domestic capabilities are becoming increasingly self-reliant, with the cumulative shipments of BeiDou-compatible chips and modules reaching hundreds of millions, supporting a secure and robust industry supply chain.
Domestic sales of BeiDou-enabled terminals exceeded 410 million units in 2025, with more than 2.2 billion BeiDou-capable devices in use across the country.
Internationally, BeiDou services and related products have been exported to more than 140 countries and regions.
On a January morning in 2026, a GPS jammer powered up near Shiraz, Iran. It was not the first, and it would not be the last. The Strait of Hormuz corridor has become one of the most persistently jammed airspaces on Earth. But this time, two satellites were watching from very different vantage points, and together they would demonstrate something new: that spaceborne sensors can localize a terrestrial GPS jammer to within a few kilometers, using physics alone.
This article presents the first direct comparison of Cyclone Global Navigation Satellite System (CYGNSS) — a NASA GNSS reflectometry constellation — and NASA-ISRO Synthetic Aperture Radar (NISAR) — an L-band synthetic aperture radar for GPS jammer localization. The results challenge assumptions about which modality performs better and reveal that the answer depends on a question most analysts forget to ask.
The setup: Known jammer, known position
Validation requires ground truth. With help from the PNT community, we identified a GPS jammer operating near 27.32°N, 52.87°E (approximately 50 km southwest of Shiraz) that was active on Jan. 8 and Jan. 20, 2026, with confirmed quiet periods on Dec. 15 and Dec. 27, 2025. The jammer’s position was established through independent signals intelligence.
This gave us a controlled experiment: two “jammer ON” dates and two “jammer OFF” baseline dates, with satellite coverage from both CYGNSS and NISAR spanning the full period.
Two satellites, two physics
CYGNSS is a constellation of eight microsatellites that measure GPS signals reflected off Earth’s surface. Each spacecraft carries a delay-Doppler receiver that maps reflected signal power across a grid of delay and Doppler bins, known as the delay-Doppler map, or DDM. When a terrestrial jammer is active, it floods the GPS band with noise, elevating the DDM noise floor and suppressing the coherent surface reflection. The effect is detectable hundreds of kilometers from the jammer, creating a wide-area footprint in the reflected signal data.
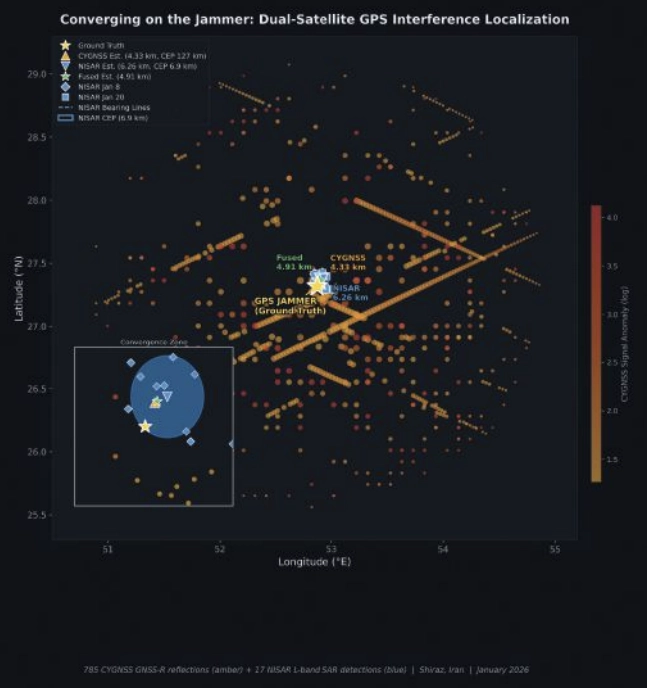
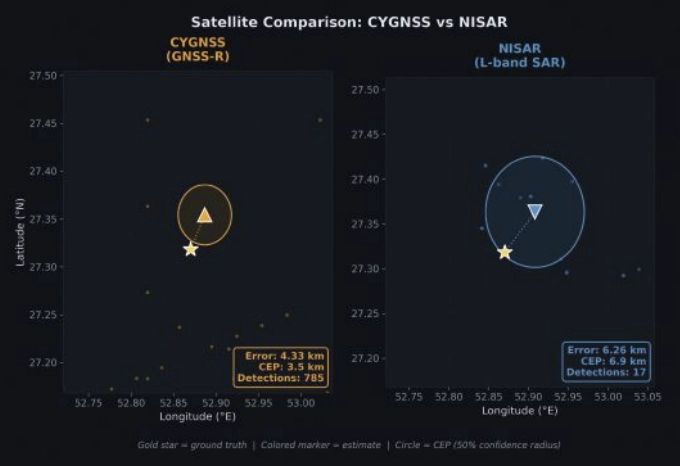
FIGURE 1 Jammer localization tracks from both CYGNSS and NISAR satellite constellations. (All figures by Sean Gorman)
NISAR operates an L-band SAR at 1.257 GHz, just 30 MHz from the GPS L2 frequency at 1.2276 GHz. When a GPS jammer’s broadband emissions leak into NISAR’s receive band, they create characteristic streaks in the SAR imagery. The streaks are elongated in the cross-track (range) direction, not along-track, a counterintuitive result that follows directly from SAR signal processing. In azimuth (along-track), the jammer is a fixed-point source with a valid Doppler history, so the SAR azimuth processor focuses it correctly, similar to any ground target. But in range (cross-track), the jammer’s broadband noise does not match the SAR’s chirp waveform, so range compression smears the energy across many range bins rather than compressing to a point. The result is a streak perpendicular to the flight direction, whose along-track centroid encodes the jammer’s latitude and whose cross-track extent encodes a range arc, which is the distance from the orbit ground track (FIGURE 1). The bearing of each streak encodes the jammer’s direction relative to the satellite’s ground track.
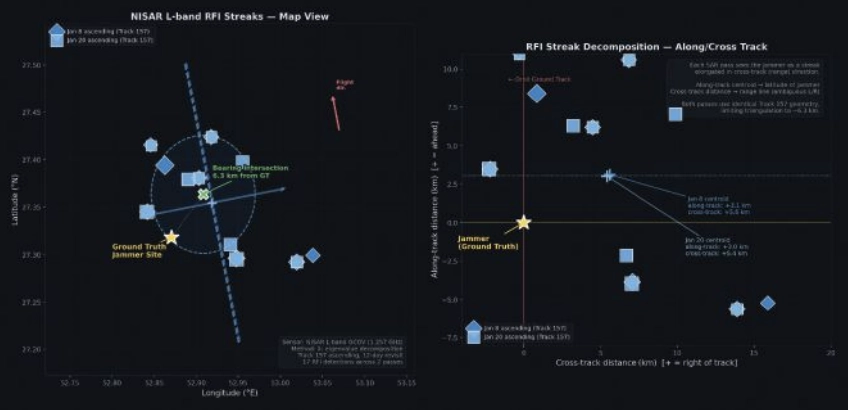
FIGURE 2 Crosstrack visualization for NISAR RFI streaks.
The two sensors could hardly be more different. CYGNSS sees the jammer’s effect on reflected GPS signals, offering an indirect measurement spread across hundreds of specular reflection points. NISAR sees the jammer’s emissions directly in its own receiver, which is a more precise measurement, but only along the satellite’s narrow ground track. FIGURE 2 shows both detection sets converging on the jammer location.
CYGNSS: 785 Detections, 4.33 km Error
We processed all CYGNSS Level 1 data within 200 km of the jammer location on both ON and OFF dates. Four detection methods contributed observations:
■ DDM noise floor (419 detections): The pre-computed ddm_noise_floor variable, calibrated against the thermal noise reference, proved the strongest discriminator. Near-jammer values exceeded 15,000 counts against a ~10,000 mean background.
■ Spatial noise grid (299):A 10 km gridded analysis identified cells with anomalously elevated noise relative to adjacent cells.
■ SNR hole detection (66): Coherent surface reflections were suppressed near the jammer, creating spatial “holes” in the SNR field.
■ NBRCS drop (1): Surface reflectivity dropped approximately 16% near the jammer, though this method produced few threshold exceedances.
Across four DDM channels per spacecraft and multiple passes, this yielded 785 total anomalous observations on the jammer-ON dates.
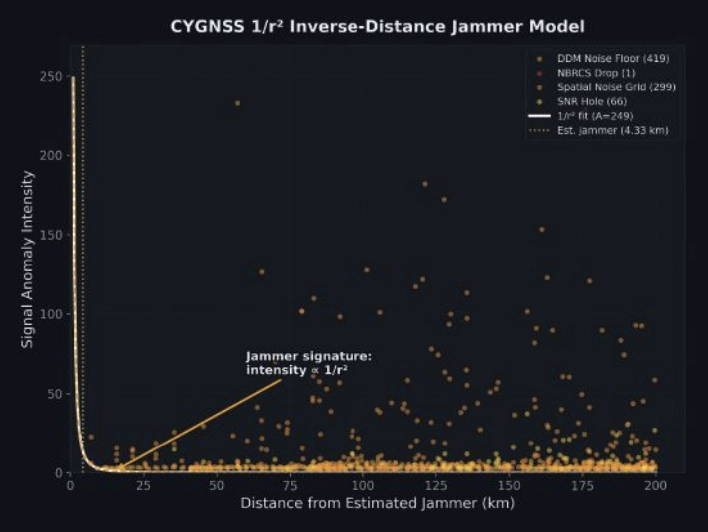
FIGURE 3 Scatterplot of interference insensity versus distance for CYGNSS.
Localizing using a simple centroid of all 785 detection positions placed the jammer 32.1 km from truth, with too many distant, low-SNR detections diluting the estimate.
Instead, we fit a parametric 1/r² inverse-distance model:
I(r)=Ar2
where A is a free amplitude parameter and r is the distance from a candidate jammer position. We jointly optimized the jammer position and amplitude using SciPy’s Nelder-Mead optimizer across all 785 observations, weighted by intensity. The optimizer converged on a position 4.33 km from ground truth, providing a 27.7 km improvement over the centroid (FIGURE 3).
The baseline: Zero false positives
On the jammer-OFF dates (Dec. 15 and Dec. 27, 2025), the pipeline produced exactly zero detections using the same thresholds, geographic area and satellites: a completely clean result. This suggests that the 785 detections are unlikely to be sensor artifacts or geographic anomalies. They disappear when the jammer turns off.
NISAR: 17 Detections, 6.26 km Error
NISAR’s approach is fundamentally different. Rather than measuring hundreds of reflected signals across a wide area, it captures direct emissions in a narrow swath, but with far greater geometric precision.
We processed NISAR L2 GCOV (geocoded covariance) products from Track 157, Frame 15 (ascending) for three dates: the Dec. 27 baseline and the Jan. 8 and Jan. 20 jammer-ON passes. The detection pipeline used eigenvalue decomposition of the polarimetric covariance matrix:
λ₁ ratio thresholding: In jammer-contaminated pixels, the dominant eigenvalue λ₁ of the 2×2 [HH, HV] covariance matrix rises sharply relative to the scene mean, indicating an unpolarized additive source.
Cross-polarization ratio (HV/HH): GPS jammer emissions are unpolarized, disproportionately elevating the HV channel. Anomalous HV/HH ratios flag contaminated azimuth lines.
Iterative outlier trimming: Three rounds of 1.5σ clipping removed scattered false detections, leaving 17 high-confidence streak centroids.
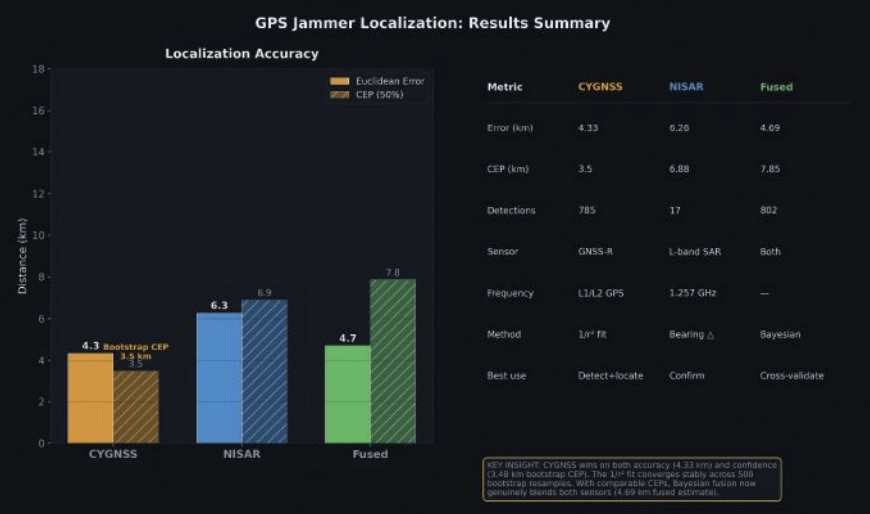
FIGURE 4 Error and CEP Metrics Comparison for CYGNSS and NISAR.
With detections from two passes on different dates, we had two independent bearing lines. Each pass’s streak centroids defined an azimuth aligned cluster whose major axis pointed toward the jammer. A PCA fit to the two clusters extracted the bearing: 308.1° from the Jan. 8 pass and 316.2° from Jan. 20. Their intersection — computed via scipy optimization of the angular residual — landed 6.26 km from ground truth (FIGURE 4).
The along-track/cross-track decomposition reveals why the 6.26 km error is a geometric ceiling for this dataset, not a processing limitation. Both passes come from the same Track 157 ascending orbit on a 12-day repeat cycle. The intensity-weighted along-track centroids land at +3.0 km and +3.1 km north of the jammer, a direct stable latitude measurement. The cross-track centroids land at +5.4 km and +5.6 km east of the orbit ground track, a range measurement. But because both passes share identical orbit geometry, the two range arcs are nearly parallel. The bearing difference between passes (308.1° vs 316.2°) is only 8.1°, producing a shallow intersection angle and poor cross-range resolution. A single descending pass, which would cross the ascending track at approximately 60-70°, would transform the geometry from two near-parallel lines to a genuine triangulation, potentially reducing the localization error to sub-2 km. Unfortunately, no descending NISAR pass covering this jammer site was available in the beta archive, which ends on Jan. 20, 2026.
The CEP (circular error probable, the radius containing 50% of repeated estimates) was 6.88 km, meaning if we ran this analysis on many similar jammers, half our estimates would fall within ~7 km.
Who wins?
CYGNSS wins, and not just on accuracy.
A naive confidence metric for the 1/r² fit would be the scatter of the 785 input detections (CEP = 127 km). But the detections are not the estimate; they are the inputs to a model fit. The relevant confidence question is: How stable is the fitted position?
We answered this with a 500-iteration bootstrap: resample the 785 detections with replacement, re-run the 1/r² optimizer each time and measure the spread of the resulting position estimates. The bootstrap CEP, the median radial distance across 500 fitted positions, was 3.48 km. The optimizer converges stably to within a few kilometers of the same location regardless of which detections are included.
This means CYGNSS achieves 4.33 km error with 3.48 km confidence, both better than NISAR’s 6.26 km error and 6.88 km confidence.
The bootstrap CEP also reveals what the raw scatter obscures: the 1/r² fit is constrained primarily by the ~80 high-intensity detections within 30 km of the jammer. The remaining 700 distant, low-intensity detections contribute little to the position estimate — they are correctly downweighted by the intensity-weighted least squares. The fit’s stability comes from the physics: a 1/r² signal has steep gradients near the source, providing strong positional constraints where it matters most.
Bayesian fusion: Can we get both?
The obvious next question: Can we combine CYGNSS’s wide-area sensitivity with NISAR’s geometric precision? We implemented four fusion strategies, all designed to work without ground truth:
■ Bayesian Gaussian posterior: Model each sensor’s estimate as a 2D isotropic Gaussian with σ = CEP/1.1774. The posterior is the product of the two Gaussians: an analytical precision-weighted mean.
■ NISAR-prior constrained 1/r²: Re-run the CYGNSS optimizer with a Gaussian regularization term pulling toward the NISAR estimate, sweeping the regularization weight λ from 0.01 to 10.
■ NISAR-proximity re-weighted 1/r²: Apply a Gaussian kernel centered on the NISAR estimate to the CYGNSS detections before fitting, effectively upweighting observations consistent with the SAR result.
■ Joint CEP-balanced: Combine the CYGNSS gradient signal with NISAR cluster proximity, weighted by (σ_CYGNSS/σ_NISAR)².
FIGURE 5 Summary statistics for jammer localization with CYGNSS, NISAR and fused approach.
With the bootstrap CEP, the precision ratio flips. The CYGNSS Gaussian (σ = 2.95 km) is now 2× tighter than NISAR (σ = 5.84 km). The Bayesian posterior, the precision-weighted mean, lands at 4.69 km, pulling toward CYGNSS’s better estimate while incorporating NISAR’s independent geometric constraint. FIGURE 5 shows the fusion: two comparable Gaussians whose product is tighter than either alone.
The fused result (4.69 km error, 7.85 km CEP) is not quite as accurate as CYGNSS alone (4.33 km), because NISAR’s 6.26 km estimate pulls it slightly away from truth. But operationally, the fusion provides a cross-validated answer: two independent physics arriving at similar locations builds confidence that neither sensor is producing an artifact.
The key insight is that the bootstrap CEP unlocked meaningful fusion. When the raw scatter CEP (127 km) was used, NISAR dominated the posterior 343:1 and fusion added nothing. With the fit-based CEP (3.48 km), both sensors contribute, and the posterior reflects genuine multi-modal evidence.
Operational implications
For CYGNSS: CYGNSS excels at both detection and localization. Its 785 detections across a 200 km radius, with zero false positives on baseline dates, provide unambiguous jammer detection. The 1/r² fit achieves 4.33 km accuracy with a bootstrap-verified 3.48 km CEP, meaning an analyst can trust the result to single-digit kilometer precision without ground truth. CYGNSS’s eight-satellite constellation also provides sub-daily revisit, enabling near-real-time monitoring.
For NISAR: NISAR provides independent geometric confirmation. With just two passes over an active jammer, the bearing intersection achieved 6.26 km accuracy with a 6.88 km CEP. The 6.26 km result is constrained by orbit geometry, not by detection sensitivity. Our two ascending passes from Track 157 produced nearly parallel range arcs with only 8.1° of bearing separation. Adding a single descending pass would provide a crossing angle of 60° to 70° and could reduce localization error to sub-2 km — transforming NISAR from a confirming sensor into a precision localization tool in its own right. The limitation in this study was data availability: The NISAR beta archive contained only ascending Track 157 passes over the jammer site. NISAR’s 12-day repeat cycle and fixed ground track also mean the jammer must be active when the satellite passes overhead. NISAR’s current value is as a confirming sensor — when both modalities converge on the same location, confidence increases beyond what either achieves alone.
For Fusion: With comparable CEPs (3.48 km vs 6.88 km), fusion now produces genuinely blended estimates. The Bayesian posterior at 4.69 km reflects real multi-sensor information. Future improvements, such as more NISAR passes with diverse bearings or CYGNSS multi-week accumulation, would tighten both estimates further.
For the Adversary: These results demonstrate that GPS jammers operating in contested airspace are observable and localizable from orbit using openly available civilian satellite data. The 4.33 km CYGNSS result is approximately 2× better than the published state of the art for GNSS-R jammer localization (~9 km grid resolution, Chew et al., 2023) and the NISAR bearing intersection approach has not been previously demonstrated for jammer geolocation.
Still broadcasting: Jammer persistence through conflict
The validation analysis used January 2026 data. But on Feb. 28, armed conflict erupted in the region. Did the jammer survive?
We ran the CYGNSS noise floor detection pipeline for each day from Feb. 28 through April 6, comparing against the December 2025 baseline. The answer is unambiguous: The jammer is not only still active — it is operating at dramatically higher power.
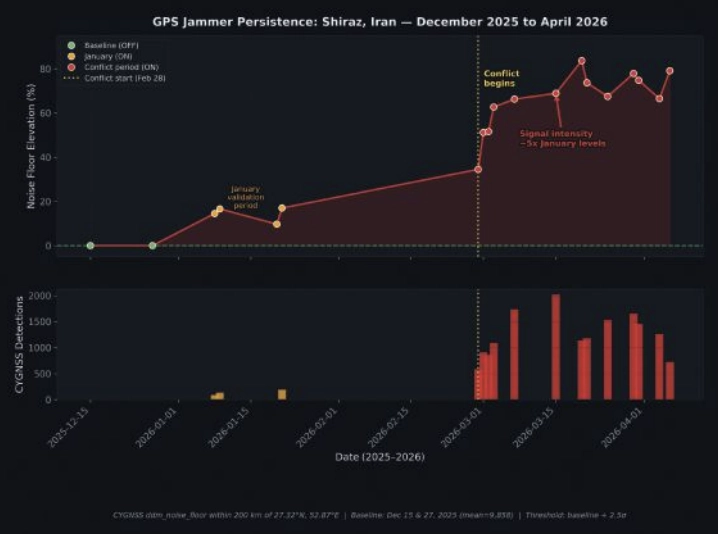
FIGURE 6 A timeline of jammer activity for Shiraz, Iran, from December 2025 to April 2026.
In January, the jammer elevated the CYGNSS noise floor by approximately 15% above baseline. By early March, days after the conflict began, noise elevation had jumped to 50% to 60%. By mid-March, it reached 70% to 84%, where it remained through early April. Detection counts tell the same story: 89 to 192 per day in January, rising to 1,000 to 2,000 per day during the conflict (FIGURE 6).
The escalation was immediate. On Feb. 28, noise elevation was +34.5%, already double the January level. By March 3, it had reached +62.7%, and by April 6, it peaked at +79.1%. The signal has remained at 5× the January intensity through the most recent available data (April 6, 2026).
Several interpretations are consistent with this pattern:
■ Power increase: The operator increased jammer output power, perhaps in response to the conflict or as a defensive posture against GPS-guided munitions.
■ Additional jammers: Multiple units may have been co-located or deployed nearby, creating an aggregate signature larger than any single device.
■ Duty cycle change: The jammer may have shifted from intermittent to continuous operation.
What is clear is that the jammer we localized in January was not incapacitated by the conflict. It was amplified. CYGNSS’s sub-daily revisit capability makes this kind of persistent monitoring possible using entirely passive, civilian satellite data — no tasking, no cooperation with the target state and no risk to reconnaissance assets.
Context and prior work
CYGNSS-based RFI detection builds on work by Chew et al., 2023, who demonstrated grid-level jammer detection at approximately 9 km resolution using DDM noise floor anomalies. Our 1/r² parametric fit extends this from detection to localization, achieving sub-5 km accuracy by exploiting the physics of signal power decay.
At the other end of the precision spectrum, Murrian et al., 2021, demonstrated ~220 m jammer localization using ISS-mounted Doppler measurements of raw intermediate-frequency (IF) data. This approach achieves an order of magnitude better precision than our methods but requires specialized hardware and raw signal access not available on current operational satellites.
The NISAR bearing intersection approach demonstrated here is, to our knowledge, the first published use of L-band SAR RFI streaks for jammer triangulation. The key insight is that NISAR’s proximity to GPS L2 (just 30 MHz separation) makes it an unintentional but effective GPS interference sensor.
Summary
Two satellites, two physics, one jammer. CYGNSS sees the interference footprint across hundreds of kilometers and localizes the source through inverse-distance physics. NISAR sees the emissions directly in its SAR receiver and triangulates through bearing intersection. Both achieve sub-7 km accuracy independently; together, they cross-validate and build the confidence that operational use demands.
The jammer near Shiraz is still there — louder than ever. The satellites are still watching.
Chew, C., Shah, R., Zuffada, C., et al. (2023). “Demonstrating CYGNSS as a Tool for Detecting GNSS Interference on a Global Scale.” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing.
Murrian, M.J., Narula, L., Iannucci, P.A., et al. (2021). “GNSS Interference Monitoring from Low Earth Orbit.” Navigation: Journal of the Institute of Navigation, 68(1).
NASA JPL. (2024). “NISAR L-band SAR Technical Specifications.” NASA/ ISRO SAR Mission Documentation. Closas, P., Fernández-Prades, C. (2023). “GNSS Interference Detection and Mitigation: A Survey.” Signal Processing, 206.
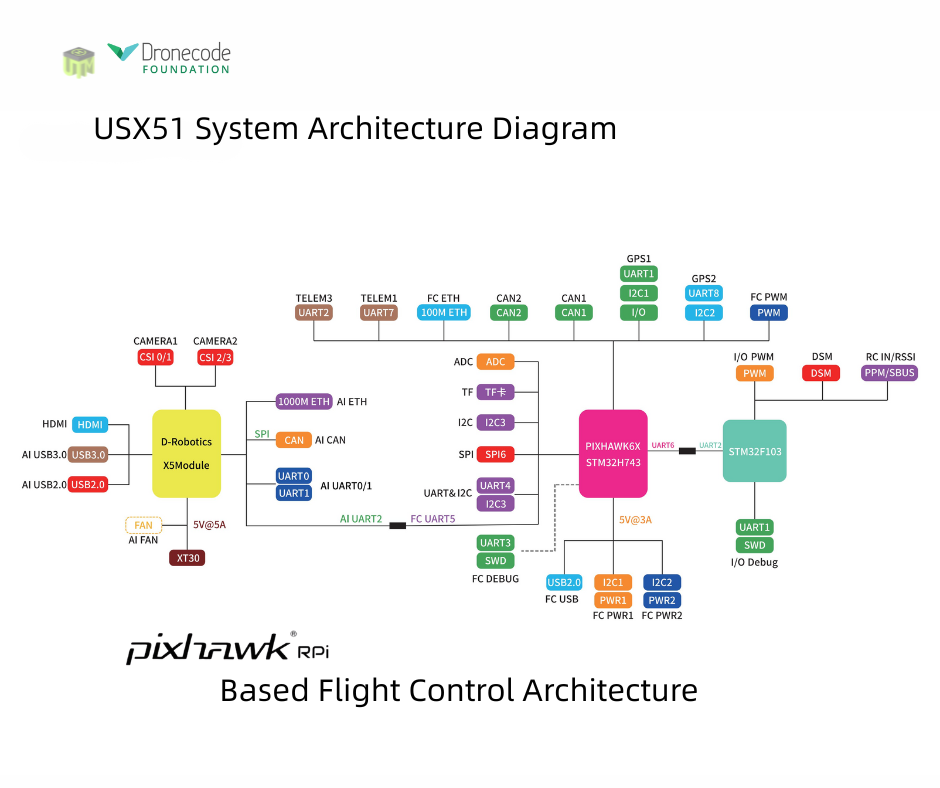
The USX51 Computing Power Flight Controller by UTMSYS is a system architecture that combines the Pixhawk 6X flight controller with the D Robotics RDK X5 edge-computing module.
According to the development team, the goal of the USX51 platform is not only to provide hardware, but to simplify complex UAV system integration for developers, research teams, and robotics engineers working on real world deployment scenarios.
The USX51 system integrates Pixhawk 6X and RDK X5 to support PX4-based UAV development for GNSS-denied, VTOL, and multi-sensor applications.
The system is designed to support PX4-based UAV development while separating real-time flight control tasks from high compute perception workloads. This decoupled architecture helps maintain flight stability while allowing developers to expand into vision based and autonomous applications.
The USX51 supports development scenarios including:
GNSS-denied navigation
VTOL mission platforms
Multi-sensor integration
Visual perception and tracking
ROS2-based robotics workflows
Research and autonomous UAV development
Credit: UTMSYS
The Pixhawk 6X handles flight critical control functions, while the RDK X5 module provides onboard computing capability for visual processing, sensor fusion, and autonomous related workloads.
The system also provides multiple communication interfaces including Ethernet, CAN, UART and I2C, allowing developers to integrate cameras, thermal modules, lidar systems, and additional peripherals into their UAV projects.
Current ecosystem development around USX51 includes PX4 integration, ROS2 workflows, developer testing programs, and community based project collaboration.
QinetiQ-led Team Elaris has been awarded a £6 million contract with the UK Ministry of Defence (MOD) to develop a deployable solution concept for enhanced long-range navigation (eLoran).
Work completed under the two-year Urgent Compass program will be used to inform future demonstration, production and deployment packages of work.
The UK and its allies rely heavily on position, navigation and timing (PNT) for effective military operations. PNT solutions traditionally use GNSS signals, but these can be jammed or spoofed by adversaries in battlefield environments. A jammed or spoofed satellite navigation signal, if undetected or uncorrected, can result in misdirected troop movements or incorrectly guided missile trajectories, leading to mission failure in the battlefield arena.
Militaries are increasingly looking for alternative, more resilient PNT solutions to enhance and complement traditional GNSS, such as eLoran which is a terrestrially based alternative and can operate when access to satellite PNT is denied. This program extends QinetiQ’s engagement with MOD on assured PNT solutions, which includes the Robust Global Navigation System (RGNS) program — another key component in UK MOD’s approach to resilient PNT.
Urgent Compass will explore eLoran based solutions that can be quickly deployed into contested locations worldwide.
Team Elaris is made up of QinetiQ, UrsaNav, Roke and GMV. Each organization brings technical knowledge and domain expertise in PNT technologies to the partnership, which is exploring both deployable and fixed eLoran solutions.
The GPS Next Generation Operational Control System program of the U.S. Space Force has been cancelled by the Defense Acquisition Executive, based upon the recommendation of the acting service acquisition executive.
OCX was intended to update command and control of the GPS satellite constellation, replacing the current system, known as the Architecture Evolution Plan (AEP), as well as replacing the Launch, Anomaly and Disposal Operations system. However, the program was unable to deliver needed capabilities on an operationally relevant timeline at an acceptable level of risk to meet the GPS constellation modernization needs.
“It’s important we refine and update acquisition processes to prioritize rapid, incremental capability delivery versus complex ‘all or nothing’ system deliveries,” said Acting Service Acquisition Executive Tom Ainsworth. “The Department of War [Defense] has made clear that we need to deliver warfighting capability at a faster rate. We must continue to work with industry to meet the needs of our warfighters as we focus on delivering the right technology on the right timeline to enhance our capabilities and maintain space superiority.”
In July 2025, following a multi-year regimen of factory testing, the Space Force contractually accepted OCX from RTX (Raytheon) and began extensive integrated systems testing to resolve liens carried over from factory testing, as well as to ensure the system could operate within the broader GPS enterprise of ground systems, satellites, and user equipment.
As of January 2026, the program cost was approximately $6.27 billion which included complete Raytheon funding to date and other government costs, such as the cost of government testing and support costs to the OCX acquisition program office.
“Regrettably, extensive system issues arose during the integrated testing of OCX with the broader GPS enterprise,” said Mission Delta 31 Commander Col. Stephen Hobbs. “Despite repeated collaborative approaches by the entire government and contractor team, the challenges of onboarding the system in an operationally relevant timeline proved insurmountable. We discovered problems across a broad range of capability areas that would put current GPS military and civilian capabilities at risk.”
Because of past delays on the OCX program, the Space Force has made incremental improvements over the last 10 years to AEP. These successful upgrades provide confidence that further upgrades to GPS ground systems will continue to support the enterprise and deliver new capabilities.
“Ultimately, we analyzed the work remaining on OCX and compared this with the current GPS control system capability,” Hobbs said. “The analysis revealed additional investment in OCX was no longer the best solution for protecting and advancing GPS capabilities. Instead, we will continue enhancing the current control system to operate the GPS satellite constellation.”
Visual localization is widely used as a low-cost solution for autonomous driving, robotics, and mobile navigation. However, monocular systems remain vulnerable to illumination changes, weak texture, occlusion, motion blur and long-term drift.
Existing map-based methods can reduce that drift by aligning camera observations with a prebuilt global map, yet many still struggle with redundant computation, weak cross-modal matching between camera images and point clouds, and optimization errors in large-scale or repetitive scenes.
The challenge is especially important for lightweight platforms that cannot afford onboard lidar, inertial measurement unit (IMU) and heavy computing. Because of these problems, deeper research is needed on camera-only map-based localization that can stay accurate, efficient and stable in complex real-world environments.
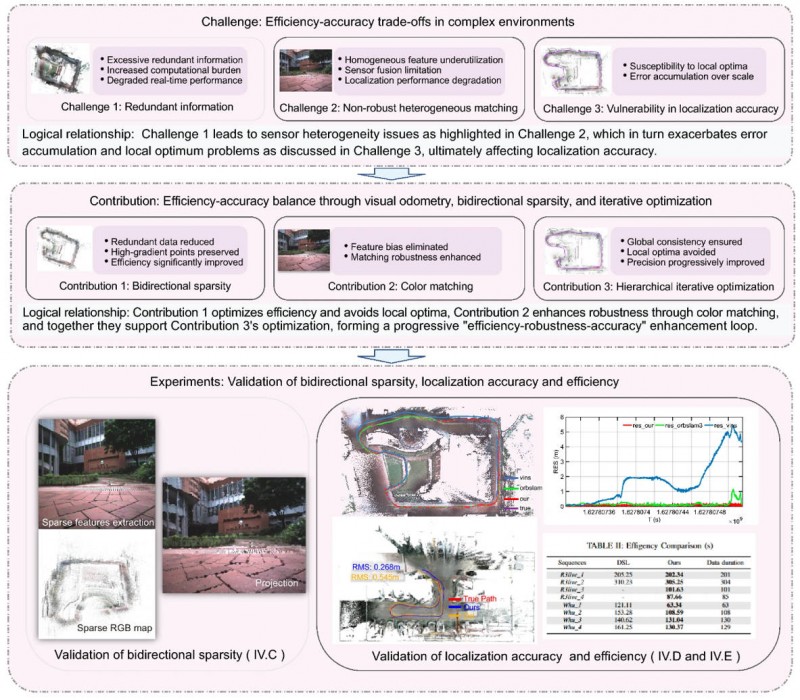
Overview of the proposed camera-only map-based localization framework. (Credit: Satellite Navigation)
On April 20, researchers from Wuhan University and Chongqing University reported (DOI: 10.1186/s43020-026-00196-x) in Satellite Navigation a camera-only localization framework that uses prebuilt colored point cloud maps, a dual-sparsity matching strategy that retains high-gradient features in both the map and image observations, and hierarchical geometric–photometric optimization to improve both positioning accuracy and computational efficiency in GNSS-challenged environments.
The system is built around two connected stages. First, the researchers generate a sparse colored point-cloud map from a denser map produced by lidar–IMU–camera mapping, keeping only high-gradient points that preserve visually salient structures while removing weak or redundant information.
They apply a similar sparse selection process to online camera images, creating what the team calls “dual-sparsity matching” between map and observation. During localization, the method uses Lucas–Kanade optical flow to track sparse 2D image features and associates them with 3D map points, while hidden-point removal helps retain only the map points actually visible from the current viewpoint.
The pose is then refined through an iterated error-state Kalman filter in two stages: a geometric PnP-style correction for stable coarse alignment, followed by photometric refinement using image intensity consistency for sub-pixel accuracy.
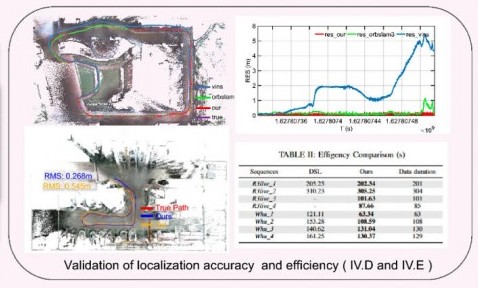
Tests on the R3live and WHU-Motion datasets showed major gains over existing methods. Compared with direct sparse localization (DSL), the new approach cut absolute trajectory error (ATE) by 52% to 95% across challenging sequences, including a drop from 1.883 m to 0.152 m on R3live_5. It also improved accuracy by up to 76.6% over I2D-Loc++, reduced total processing time by as much as 47.7%, and remained robust in degenerate scenes where geometry-only localization deteriorated to 9.23 m while the proposed tracker held an ATE of 0.076 m.
Ablation results further showed that colored maps, bidirectional sparsity, and hierarchical optimization each played a distinct role in achieving the final balance of speed, robustness, and precision.
The authors said the main advance is not simply adding color to a map, but treating the global colored point cloud map as a continuous observation within the visual odometry framework. They said the framework shows that a monocular camera can localize far more robustly when paired with a prebuilt colored point cloud map and a coarse-to-fine optimization design that avoids poor local solutions.
In their view, the study offers a practical middle ground between fully sensor-rich systems and fragile vision-only pipelines, preserving much of the accuracy benefit of map-based localization without demanding equally heavy hardware on the client platform.
The work could have immediate value for indoor logistics robots, underground inspection platforms, warehouse vehicles, parking-garage navigation systems, and other low-cost autonomous agents operating where GNSS is weak or unavailable. Because the mapping can be completed offline and reused, the online platform needs only a monocular camera, which lowers sensing requirements while retaining strong global constraints.
That makes the method especially attractive for scalable deployments in structured but challenging spaces such as tunnels, campuses, hospitals, and industrial facilities. More broadly, the study suggests that future navigation systems may become both lighter and more dependable by making better use of the information already shared between maps and images, rather than relying only on ever-larger sensor stacks.
Lockheed Martin has successfully completed the core mate phase of GPS IIIF Space Vehicle 11 ( SV11), a critical production milestone that marks the satellite’s formal “birth.”
Continued manufacturing and deployment of these next-generation GPS spacecraft is essential to maintaining reliable global coverage, with the GPS IIIF block introducing a suite of new capabilities that further strengthens the constellation’s resilience. GPS IIIF satellites are equipped with Regional Military Protection, improving anti-jamming capability by more than sixty times, giving warfighters a decisive edge against sophisticated electronic warfare threats.
GPS IIIF SV11 is the third GPS IIIF satellite to complete the core mate phase, after SV13 and SV14 completed core mate last year. GPS IIIF SV11 will be the first IIIF satellite to launch.
“Core mate of SV11 showcases the production momentum behind the next-generation GPS IIIF satellites as we continue to invest in advanced manufacturing,” said Christina Mancinelli, vice president of Global Communications & Navigation at Lockheed Martin. “With three GPS IIIF satellites past core mate, we’ve taken pivotal steps toward accelerating production, ensuring we’re delivering critical next-generation resiliency capabilities to the GPS constellation at the pace warfighters need to protect our nation.”
The SV11 satellite is also M-code-enabled, providing an encrypted, anti-spoofing signal that strengthens positioning, navigation and timing (PNT) capabilities for military users globally. Additionally, SV11 is equipped with a new search-and-rescue payload that will allow first responders to navigate to emergencies in remote locations.
With an eye on strengthening GPS, all GPS IIIF satellites starting with SV13 will be built on the evolved LM2100 Combat Bus, which adds additional cyber-hardening and improved spacecraft power, propulsion and electronics. These vehicles are equipped with extra size, weight and power, providing flexibility to integrate additional payloads quickly onto future space vehicles.
GPS IIIF satellites are manufactured at Lockheed Martin’s Denver, Colorado, facility, where the company is accelerating production through the use of augmented reality and digital twins. Lockheed Martin is currently under contract through GPS IIIF SV22 and recently completed all launches of GPS III space vehicles.
The National Physical Laboratory (NPL) and Vodafone have successfully completed a set of trials using the NPLTime service as an alternative to GPS-timing signals.
Requirements for precise time delivery have driven the telecoms sector toward the increased use of GNSS for accurate timing. There are various alternatives to GNSS, each with their own capabilities, but GNSS has become the default mechanism for most sectors to access timing signals.
As the telecommunications industry rolls out 5G networks and prepares for 6G, it’s important there is a range of diversified timing signal sources that are resilient and secure. All major telecommunications providers in the UK and Europe share this requirement.
In the UK, VodafoneThree is the first mobile network operator to test the performance of a terrestrial NMI-provided time source as an alternative to GNSS-based time in their network timing infrastructure.
Vodafone is accelerating 5G coverage and improving data service performance across Europe and emerging markets by deploying 5G standalone networks, launching enterprise-grade slicing services, and 5G Advanced programs.
Vodafone is positioning itself as a future-ready connectivity platform for both consumers and industries, making it a must to protect the 5G network and future networks. Vodafone is actively reducing reliance on GNSS for time synchronisation for the VodafoneThree network in the UK and other Vodafone markets around Europe in collaboration with European Metrology Institutes.
The partnership will support the reliability and resilience of VodafoneThree’s £11bn network investment program to create the UK’s best network, reaching 99% 5G standalone population coverage by 2030, and 99.96% by 2034.
For the past 30 years, NPL has been operating the UK’s national time scale, UTC (NPL), and for the past eight years it has been disseminating NPLTime, an end-to-end fibre-based timing service that has been supporting the finance sector with regulatory compliance.
The partnership between NPL and Vodafone will develop a telecom version of the NPLTime service that meets stringent ITU standards for signal accuracy, stability, resilience and traceability. More specifically, the new service will deliver a terrestrial reference signal that is traceable to UTC (NPL) and can maintain accuracy within 40ns.
At the end of the trial, the new service will meet the accuracy requirements of most sectors in the UK and offer the potential for telecommunications operators to extend the reach of a UK sovereign time source to other industries. Vodafone intends to replicate the same telecom timing infrastructure across all Vodafone markets.
The partnership builds on the UK government’s efforts to increase resilience for position, navigation and time (PNT) for the UK’s digital infrastructure as well as on NPL’s role in delivering the National Timing Centre (NTC) program.
“Our work with the National Physical Laboratory marks a significant step in reducing over reliance on GPS-based timing and strengthening the foundations of our future-ready 5G Standalone network,” said Andrea Donà, chief network officer, VodafoneThree. “By testing a terrestrial timing solution we’re helping to ensure that our £11 billion investment delivers a network that is not only faster and more reliable, but also more secure and resilient for our customers.”
ICAO Secretary-General Juan Carlos Salazar told delegates at the 2026 World Overflight Risk Conference in Vallarta, Malta, that emerging military technologies — including long-range weapons systems, unmanned aircraft systems (UAS), GNSS radio frequency interference, and advanced air defense systems — pose growing risks to civil aviation.
“We must now reach beyond the boundaries of aviation as we have known it,” Salazar said, adding that increasingly sophisticated weaponry is creating conditions in which civilian aircraft face a heightened risk of being targeted or caught in crossfire.
While praising the aviation industry’s ability to reroute flights and maintain operations during the recent Middle East crisis, Salazar said operational flexibility alone cannot address the underlying security threats posed by weapons systems.
He commended states and airspace users for measures taken to mitigate safety and security risks during the escalation in the Middle East, noting that more than 10 states partially or fully closed their airspace, significantly disrupting international air transport.
“This commitment to resilience, adaptation, safety and security is the foundation of our industry,” he said, calling for concrete steps to prevent civil aviation facilities, airports and aircraft from being targeted.
Salazar cited ICAO Assembly Resolution A42-4 and Article 3 bis of the Chicago Convention — which prohibit the use of weapons against civilian aircraft — as the legal basis for stronger protections. He said, however, that international law alone has proven insufficient as regional conflicts intensify.
Following ICAO guidance, Salazar urged states to take three immediate actions: rapidly share threat intelligence when activities pose risks to civilian aircraft; strengthen risk assessment and timely decision-making; and improve coordination between military and civilian authorities to prevent misidentification of civilian aircraft as military targets.
ICAO is finalizing a Global Crisis Management Framework to coordinate responses when civil aviation faces threats. Salazar said the reactive framework must be paired with proactive measures to prevent attacks.
The organization is also updating its Manual Concerning Safety Measures Relating to Military Activities and its Risk Assessment Manual for Civil Aircraft Operations Over or Near Conflict Zones, with a focus on improving how authorities, airlines and air navigation service providers assess threats from malicious activity.
Recent disruptions during the Middle East crisis demonstrated both the industry’s adaptability and the economic impact of operating in an increasingly militarized airspace environment. ICAO regional contingency frameworks have supported rerouting when airspace becomes unsafe, but officials said such measures are costly and temporary, not solutions to underlying security risks.
The two-day Malta conference, which opened April 21, brought together aviation officials and security experts from multiple regions to discuss implementation of safety protocols and information-sharing mechanisms. The Safer Skies initiative also serves as a framework for those discussions.
Salazar’s remarks mark one of ICAO’s most direct acknowledgments of growing risks to civil aviation arising from conflict zones, reflecting the organization’s core mission to maintain safe and secure international air travel amid rising geopolitical tensions.
Following the conference, Salazar met with Myriam Spiteri Debono to discuss global and regional developments affecting aviation, with a focus on the role of multilateral cooperation in addressing emerging challenges, including conflict-zone risks. He also commended Malta’s aviation sector.
Salazar was accompanied by Nicolas Rallo, director of ICAO’s European and North Atlantic Regional Office.